8. fejezet - Aktív kormányzás
- 8.1. A passzív és az aktív kormányrendszer összehasonlítása
- 8.2. A különböző elektronikus menetdinamikai szabályozó rendszerek együttműködése
- 8.3. Menet közben változó áttétel, nagyobb komfort és biztonság
- 8.4. Aktív kormányzás bolygóművel és csigahajtásos villanymotorral
- 8.5. Aktív szervokormány hullámhajtással
- 8.6. Elvárások a közeljövő szervokormányaival szemben
- 8.7. Ellenőrző kérdések az aktív szervokormány témakörhöz
8.1. A passzív és az aktív kormányrendszer összehasonlítása
A hagyományos szervokormány passzív rendszernek nevezhető, mert a vezető kormányzási beavatkozásaira mechanikusan, előre meghatározott módon reagál.
Az aktív kormányzásnál a vezető kormányzási beavatkozásain kívül más elektronikus rendszerek is hatást gyakorolhatnak egy elektronikán és szabadon vezérelhető beavatkozó egységen keresztül. Egy állító motorral a vezetőtől független a pillanatnyi dinamikai állapotnak megfelelő kiegészítő kerék elkormányzás válik megvalósíthatóvá. Így tehát az elkormányzási szög az aktív szervokormánynál δ k két részből tevődik össze. Az alap szervokormány által megvalósított értéket egészíti ki a beavatkozó egység által végzett módosítás.
|
|
ahol:
|
δ k |
az első kerék elkormányzási szöge |
|
|
i D |
a kormánygép közvetlen áttétele |
|
|
i m |
a villanymotor hajtóművének áttétele |
|
|
δ g |
a kormánykerék elfordítási szöge |
|
|
δ m |
a villanymotor elfordítási szöge |
Az aktív szervokormány a menetbiztonság és a menetdinamika fokozását teszi lehetővé. Fontos szerepet tölt be a gépkocsi aktív biztonságánál.
Az aktív kormányzásnál megvalósul a sebességfüggő kormányzási nyomaték rásegítés, hasonlóan a jól bevált „szervotronik” működéshez. Az EPS (Elektronic Power Steering) lehetővé tette a kormányzás csillapításának befolyásolását és az aktív egyenes meneti visszaállást.
A működési területek kibővítése az aktív kormányzásnál tovább folytatódott. Az áttétel folyamatos változásával a kormányzási nyomaték és a fogaslécen kifejtett erő is befolyásolhatóvá vált. Az aktív kormányzásnál a gépkocsivezető csak az első kerekek elkormányzási szögét állítja be. Ezzel a menetbiztonság, a komfort és a gépkocsi agilitása tovább növekedett. Ez a konstrukció egyúttal jó előkészítés lett a Steer-by-Wire rendszer bevezetésének, mely azért még várat magára. Megtörtént ugyanis bizonyos működésmódok szétválasztása egymástól. A változó áttételű aktív kormányzásnál ugyanis két terület világosan szétválasztható egymástól:
-
az elkormányzási szög függvényében a gépkocsi agilitását növelő működésmód, amely optimalizálja a gépkocsi reakcióit a kormánykerék elfordítására.
-
a gépkocsi stabilizálását végző működésmód, mely különösen a határtartományban fontos.
A változó áttételű aktív kormányzásnál meghibásodás esetén a kormánykerék és a kormányzott kerekek közötti közvetlen összeköttetés megmarad. Hasonló módon menet közben folyamatosan megvalósul az útfelületről a megfelelő visszacsatolás. Az Audi a szabályozási struktúrák fejlesztésénél ezen a területen a Matlab/Simulink programot alkalmazta.
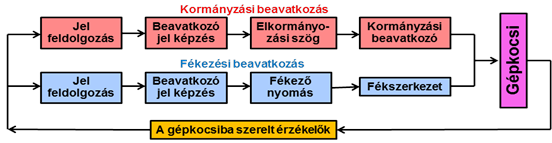
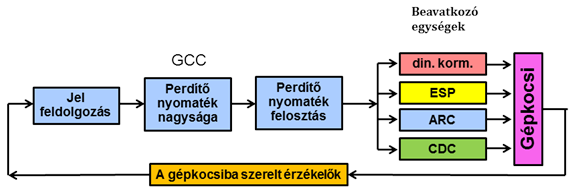
A fejlesztéseknél fontos szerepet játszik a változó áttételű aktív kormányzás együttműködése a többi különböző menetdinamikai szabályozó rendszerekkel. mint például a belsőégésű motor, a futómű és a fékrendszer. Ez utóbbinál fontos például a nem homogén útfelületen történő fékezésnél a különböző szabályozó rendszerek együttműködése. A kormányzás és a fékezés párhuzamos együttműködését szemlélteti az alábbi ábra blokkdiagramja.
8.2. A különböző elektronikus menetdinamikai szabályozó rendszerek együttműködése
Menet közben például az ESP határozza meg a gépkocsivezető szándékának megfelelő menetpályát. Ezt a fontos információt azonban a változó áttételű aktív kormányberendezés is fel tudja használni az első kerekek szükséges elkormányzási szögének meghatározásához.
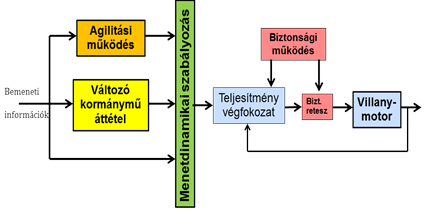
Sokkal összetettebbé és hatékonyabbá is válik a működés további menetdinamikai szabályozó rendszerek bevonásával. A Global Chassis Controls (GCC) rendszernél például valamennyi, a menetdinamikát befolyásoló rendszer összevonva működik. Az aktív kormányzás tehát a fék-, az ESP rendszerrel és a változtatható karakterisztikájú lengéscsillapítókkal is kapcsolatban áll és kölcsönösen befolyásolják egymás működését.
Nem csupán a bemeneti adatokat használják együttesen, de a beavatkozások is összehangoltak. Például a perdítő nyomaték szabályozásnál a beavatkozási lehetőségeket is szétosztják az egyes alrendszerek aktuátorai között. Ezzel a kerekeknél az „üzemi pontot” úgy igyekeznek beállítani, hogy a gépkocsinál teljesen kihasználható legyen az erőátviteli potenciál.
A fentiekből egyértelműen kiderül. hogy a többi rendszertől függetlenül nem lehet az aktív szervokormányt sem fejleszteni. Ez csak úgy lehetséges, ha figyelembe veszik, hogy a többi menetdinamikai szabályozó rendszerrel elektronikus adatátviteli kapcsolatban áll, és a folyamatos együttműködés valósul meg.
Itt kell megjegyezni, hogy az egyes részrendszerek közötti együttműködés is sokkal összetettebbé vált, mint az eddig tapasztalható volt.
8.3. Menet közben változó áttétel, nagyobb komfort és biztonság
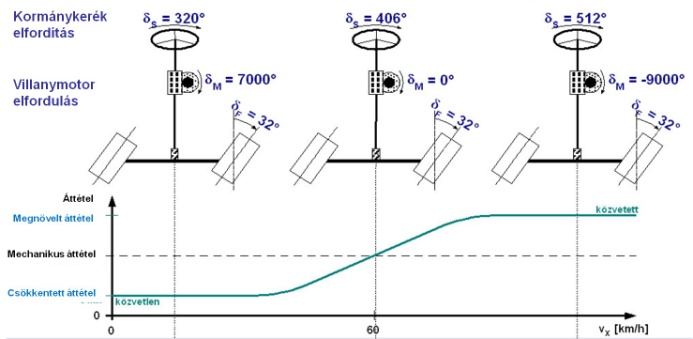
A kormányzásnál tovább fokozható a komfort és biztonság az aktív szervokormánnyal. Ennél nem csak a rásegítés nagysága, hanem a kormányberendezés áttétele is a pillanatnyi menethelyzethez igazodik.
A gyorsan reagáló közvetlen kormányzás kis áttételt igényel. Ez különösen szűk helyre történő beállásnál, különböző manőverezéseknél előnyös, mert elegendőek csupán kis kormánymozdulatok. Ennek viszont az a hátránya, hogy jelentős erőkifejtésre van szükség. Nagy sebességű autózásnál például kis rásegítés szükséges a kormányzás indirektebbé válhat.
Optimális lenne lassú haladáskor kisebb-, és gyorsabb haladáskor nagyobb áttétel megvalósítása, továbbá ezzel párhuzamosan a sebességfüggő rásegítésre is szükség van.
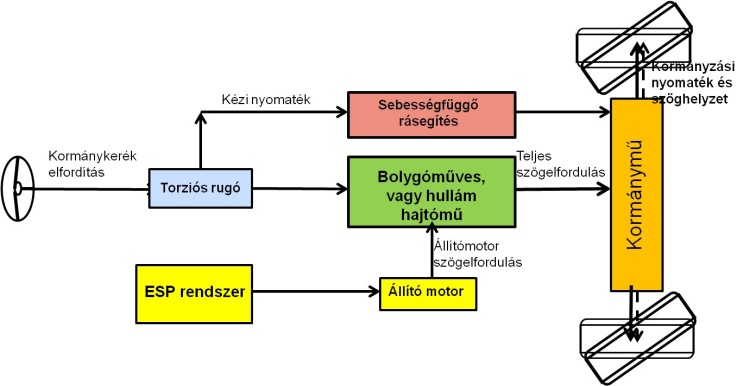
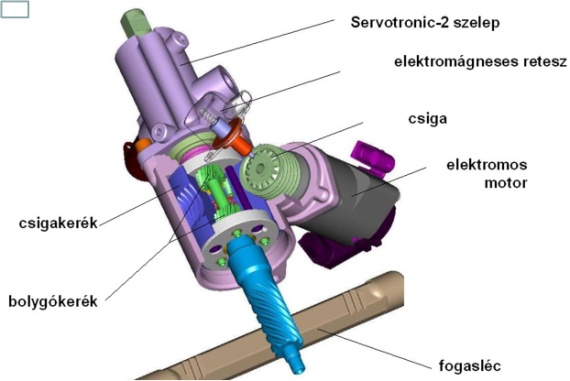
A kisebb, vagy nagyobb rásegítés hidraulikusan, vagy elektromosan is lehetséges. A kormányberendezés áttételének változtatása már egy másik feladatot jelent, amely mechanikusan, egy differenciális szöghajtás segítségével működhet. Ehhez a kormánykerék és a fogasléchez kapcsolódó kis fogaskerék közé egy bolygóművet, vagy egy hullámhajtást kell beszerelni. Ilyen módon eggyel megnövelhető a kormánymű szabadságfoka. Ezt, ha egy mechanikus áttétellel növelt villanymotorral kötjük le, a vezetőtől független kormányzási korrekciók válnak lehetségessé. Méghozzá úgy, hogy a kormánykerék pillanatnyi helyzetére ez nincs befolyással. A kormánykerék elmozdításával azonos, vagy akár ellentétes irányú kiegészítő forgatást tud végezni az elektronika a fogasléces kormányberendezés kis fogaskerekén. Ennek olyan a hatása, mintha megváltozott volna a mechanikus áttétel.
Ehhez a kiegészítéshez az is szükséges, hogy elfordulási szög jeladót szereljenek a kormányberendezés fogaskerekére és a villanymotorra is. Amennyiben az érzékelőktől érkező jelek elfogadhatatlanok, vagyis valamilyen hiba áll fenn, a kormányberendezés visszakapcsol normál mechanikus működésre. Ez a kiegészítő hajtómű mechanikus reteszelésével valósulhat meg. Például ilyenkor egy elektromágnes árammentes állapotba kerül és ezért a beépített rugó reteszelni fogja egy csap segítségével a kiegészítő beavatkozó egységet.
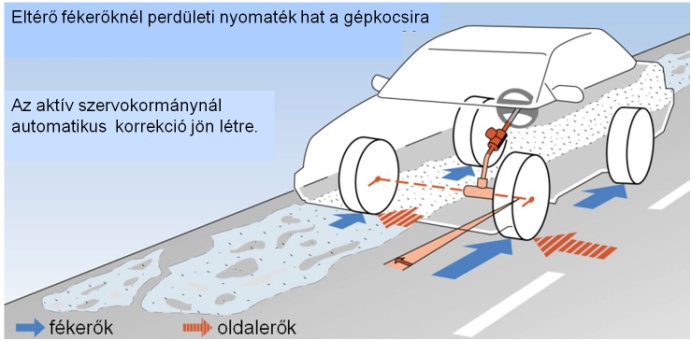
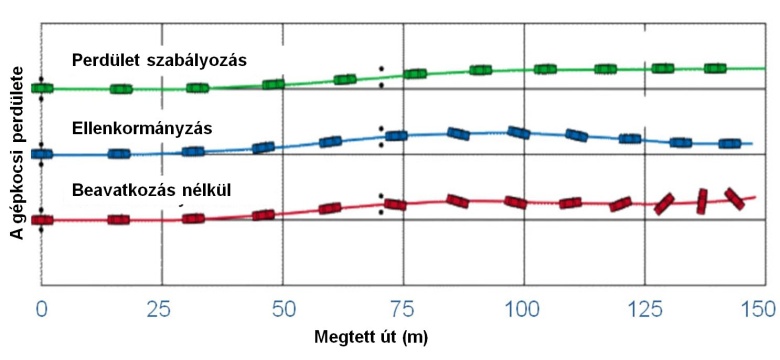
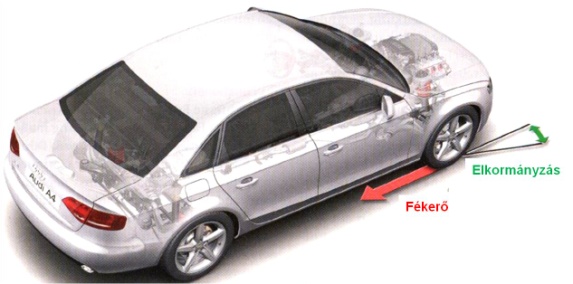
Az aktív szervokormány tehát lehetővé tesz egy külső beavatkozást a kormányzásba. Például amikor a gépkocsi olyan útfelületen fékez, melynél a jobb-, és a bal oldali kerekek alatti tapadási tényező egymástól jelentősen eltér, és ezért kitörne a nagyobb tapadású rész irányába, a beavatkozással ezt megakadályozza. A különböző elektronikus rendszerek ezen a területen egymással együttműködnek. Ugyanis az ESP rendszer érzékeli a gépkocsi instabil viselkedését és a CAN hálózaton keresztül beavatkozási parancsot tud küldeni az aktív kormányzásnak, ami végrehajtja a szükséges korrekciót. Így a gépkocsi nyomtartó marad. Ha ez nem lenne elegendő az ESP rendszer aktiválhatja a fékezési beavatkozást.
8.4. Aktív kormányzás bolygóművel és csigahajtásos villanymotorral
A ZF Lenksysteme, a Robert Bosch GmbH és a ZF Friedrichshafen AG 50-50%-os részesedéssel létrehozott közös vállalata fejlesztette ki az új, aktív szervokormány egyik változatát. Az első alkalmazó a BMW, mely közreműködött az aktív kormányzási rendszer kifejlesztésében. Az aktív kormánymű, vagy angolul Active Steering már csaknem egy évtizede sorozatgyártásban van. A fogasléces hidraulikus szervokormányhoz bolygómű segítségével villanymotor csatlakozik, mely végrehajtja a szükséges kormánykorrekciót. Eközben az első kerekek és a kormánykerék közötti mechanikus kapcsolat folyamatosan megmarad.
8.4.1. A ZF – Bosch aktív szervokormány szerkezeti kialakítása
Az aktív kormányzás vezetőtől független beavatkozását a beépített bolygómű teszi lehetővé, melyet a kormányoszlopba építettek be. Az így megvalósított többlet szabadságfok lehetővé teszi a kormánymű folyamatos- és helyzettől függően változó áttételét. Így komfortos kormányzás valósulhat meg, mert optimalizálható a működtetés erőszükséglete. A kiegészítő bolygóműves hajtásnak két bemenő és egy kimenő tengelye van. Az egyik bemenő tengely a kormánykerékhez kapcsolódik, a másik pedig egy csigakerekes áttétellel a villanymotorhoz. Ez valósítja meg a vezetőtől független kormányzási beavatkozásokat. A kerekek elkormányzási helyzete a pillanatnyi menetviszonyoktól függően kisebb, vagy nagyobb is lehet, mint amit a vezető a kormánykerékkel beállított. Amikor a villanymotor nem forog a kormánykerék és a kerekek között közvetlen kapcsolat jön létre hasonlóan, mint a hagyományos rendszereknél.
Az aktív szervokormány elektronikája dolgozza fel az érzékelők jeleit, ha szükséges működteti a villanymotort és ellátja a teljes kormánymű felügyeletét is.
8.4.2. Az aktív szervokormány és az ESP együttműködése
Az aktív kormánymű egyik nagy előnye, hogy együttműködésre képes az ESP rendszerrel és támogatja annak beavatkozását. Az aktív kormánymű elektronikája, az érzékelők jelei alapján a gépkocsi alul-, vagy túlkormányzott viselkedését automatikus kormánykorrekcióval szűnteti meg. A menetdinamikai szabályozó ESP rendszer így már nem csak a fékrendszeren keresztül végzett beavatkozással és a belsőégésű motor nyomatékának csökkentésével, hanem kormányozással is beavatkozhat. Előnye az, hogy a kormányművön keresztüli beavatkozás gyorsabb, hatását is kevésbé érzi a vezető és az utasok, mint amikor célzottan egy bizonyos kerék fékezésével végzi a korrekciót.
8.4.3. Az aktív szervokormánnyal komfortosabbá válik a vezetés
Az új aktív szervokormány, a menetdinamikailag kritikus helyzetekben nyújtott hatékony stabilizáló beavatkozásán kívül komfortosabbá teszi a vezetést. Az aktív kormánymű változó áttételi aránnyal működhet, például a gépkocsi haladási sebességének függvényében.
Amikor például kicsi a gépkocsi sebessége, a villanymotor a kormánykerék elfordításával azonos irányban forgatva segíti a parkolást, és a kis ívű kanyarok bevételét. Ezáltal a gépkocsi aktívabbá, jobban irányíthatóvá válik. Nagyobb sebességnél ellenkező irányba forgatva avatkozik be a villanymotor, ezzel csökkenti a kerék elkormányzási szögét. A kormánymű indirekté válik, a gépkocsi nyugodtabban reagál, a vezetés biztonságosabb. Az érzékelők másodpercenként százszor közvetítenek adatokat az elektronikának. Ezek alapján születik meg a döntés arról, hogy szükséges –e, és ha igen, akkor melyik irányba a villanymotorral a rásegítés. Az aktív szervokormánnyal a szűk kanyarokban haladva meggyőző a különbség a hagyományos szervokormányhoz hasonlítva a vezető munkájánál.
8.4.4. Rendszerhiba esetén is biztonságos a kormányzás
Ha valamilyen elektromos hiba miatt az elektronika kikapcsolja az aktív kormányzást, az állító motor és a hozzá kapcsolódó bemenő tengely rögzített állapotban marad. A bolygómű rövidre zárt rendszerként forog, a gépkocsi korlátozás nélkül, állandó áttétellel kormányozható. Az aktív kormányzás üzembiztonsága nagyobb, mint a teljesen elektronikus „steer-by-wire” koncepciót megvalósító rendszeré. Ez utóbbi ugyanis meghibásodás esetén nem tud közvetlen mechanikus kapcsolatot létesítve vész üzemmódra átkapcsolni. A mechanikus kapcsolat olyan érv, amellyel az autóvezetők meggyőzhetők az új rendszer elfogadásáról. Ők ugyanis csak akkor döntenek majd az új működési elv mellett, ha minden körülmények között biztonságban érzik magukat.
A „by-wire” megoldással csak akkor érhető el tökéletes biztonság, ha beépítenek egy második, redundáns rendszert. Ehhez két elektromos hálózat, két akkumulátor, megkettőzött érzékelők, vezérlőegység, vagy egy kiegészítő hidromechanikus kormánymű szükséges. A többletköltségek jelenleg még kizárják az elektronikus átvitellel működő kormánymű sorozatgyártását és gépkocsiba szerelését. A hatósági előírások sem engedélyezik még jelenleg.
8.5. Aktív szervokormány hullámhajtással
Ezt a szervokormányt Audi „Drive Select” programján belül működő „Dinamiklenkung” gépkocsi irányítási program valósítja meg, melyet az új Audi A4 típussal együtt, annak új egységeként mutattak be. Azóta már más típusokba is alkalmazzák. A Drive Select a vezetőnek olyan lehetőséget kínál, hogy egyetlen gombnyomással sportos, vagy komfortos működésnek megfelelően egyszerre több elektronikusan működő rendszert állítson be. az egyik, vagy a másik működési módra. Ennek során a következő részegységeket befolyásolhatja:
-
a belsőégésű motor,
-
az automatikus sebességváltó,
-
a kormányzás,
-
a lengéscsillapítás karakterisztikája.
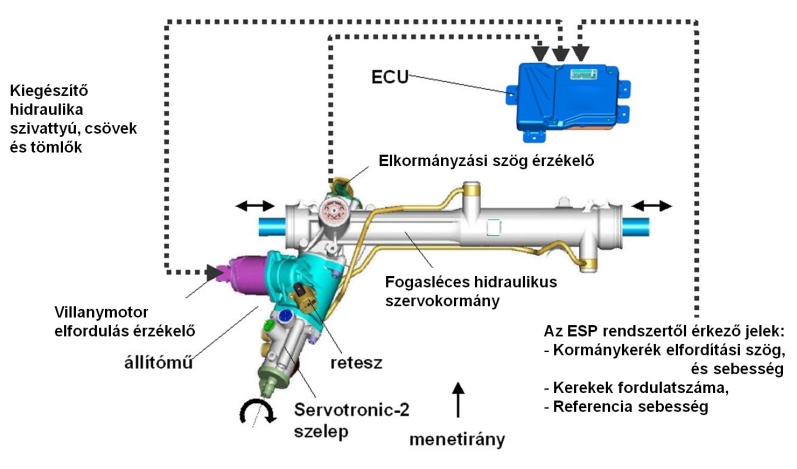
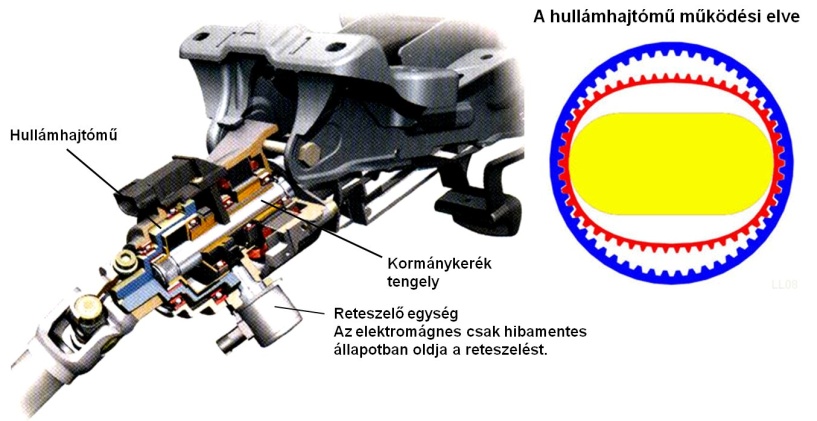
A dinamikus kormányzás „Dynamiklenkung” egy hullámhajtás segítségével változó kormánygép áttételt valósít meg. Ennek a hajtómű egységnek a reteszelő berendezése az elektronika öndiagnosztikai vizsgálata után az elektromágnes segítségével csak hibamentes állapotban old. Ha a villanymotor azonos irányban forgat a kormánykerékkel, növelni fogja az elkormányzási szöget. Ellentétes irányba forgatva csökkenti azt! Ezzel azt a hatást éri el, mintha a kormánygép áttétele változna meg.
Ezt a hajtómű egységet a kormánykerék tengelyére szerelik fel. Lehetőséget ad arra is, hogy az ESP rendszer is használja mint beavatkozó egységet. Ennek az előnye az, hogy az ilyen beavatkozás hatására a gépkocsi nem fog lassulni.
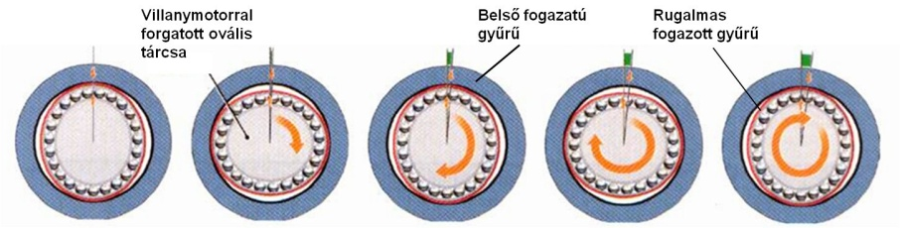
A hullám-hajtómű ovális tárcsáját a beavatkozást végző villanymotor forgatja. Ennek hatására a rugalmas, fogazott gyűrűvel fordít a belső fogazatú gyűrűn. A forgásiránytól függően ennek hatására az első kerekek elkormányzása kisebb, vagy nagyobb lesz.
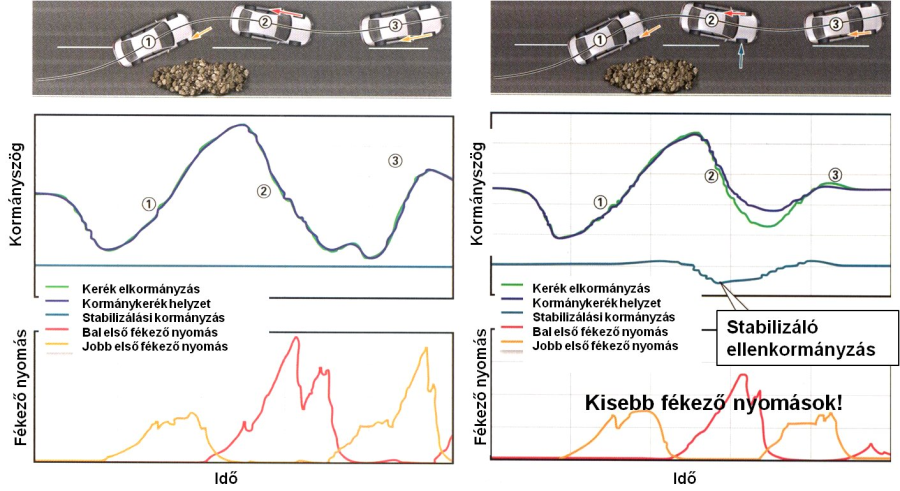
Az ESP rendszer elsődleges beavatkozása az ilyen aktív szervokormánnyal ellátott gépkocsiknál már a kormánykorrekció lett. Sok esetben az egyik kerékre kiadott fékezési impulzus el is maradhat, amennyiben a gépkocsi menetállapotán az első kerekek elkormányzásával sikerült a szükséges mértékben módosítani. Ennek az előnye az, hogy így nem fog csökkenni a gépkocsi sebessége, mint amikor egy – egy kerék fékezésével történik a beavatkozás.
8.6. Elvárások a közeljövő szervokormányaival szemben
-
A megszokott kormányzási tulajdonságok megtartása mellett tegye lehetővé a „steer-by-wire” megvalósítását. Ez azt fogja jelenteni, hogy amikor a hatósági előírások is lehetővé teszik ezt, megszűnik a mechanikus összeköttetés a kormánykerék és az első kormányzott kerekek között. Ennél a biztonság miatt az elektromos működtetés és a tápfeszültség ellátás is két körös kell legyen.
-
Járuljon hozzá a gépkocsik tüzelőanyag fogyasztásának jelentős csökkentéséhez.
-
A gépkocsik valamennyi típusváltozatához legyen elegendő a teljesítménye.
-
Meghibásodás esetén váljon lehetővé a vezető által a mechanikus kormányzás.
8.7. Ellenőrző kérdések az aktív szervokormány témakörhöz
-
Hasonlítsa össze az aktív és a passzív szervokormányokat!
-
Mit jelent az aktív szervokormányoknál a változó áttétel?
-
Foglalja össze az aktív szervokormány és az ESP rendszer együttműködését!
-
Ismertesse a bolygóműves aktív szervokormány szerkezeti kialakítását!
-
Ismertesse a hulláhajtóműves aktív szervokormány szerkezeti kialakítását!
-
Foglalja össze a hullámhajtómű működésének lényegét!
-
Milyen biztonsági berendezést alkalmaznak az aktív szervokormányoknál, mely rendszerhiba esetén lép működésbe?
-
Foglalja össze az aktív szervokormányoknál tapasztalható vezetési komfort növelő vonatkozásokat!