Irányításelmélet
Szerzői jog © 2014 Dr. Bokor József, Dr. Gáspár Péter, Dr. Szabó Zoltán

A tananyag a TÁMOP-4.1.2.A/1-11/1-2011-0042 azonosító számú „ Mechatronikai mérnök MSc tananyagfejlesztés ” projekt keretében készült. A tananyagfejlesztés az Európai Unió támogatásával és az Európai Szociális Alap társfinanszírozásával valósult meg.

A kiadásért felel a(z): BME MOGI
Felelős szerkesztő: BME MOGI
ISBN 978-963-313-175-6
2014
- 1. Bevezetés
- 2. Mechanikai rendszerek modellezése fizikai elvek alapján
- 3. Rendszerek modellezése állapottérben
- 4. Rendszerek elemzése idő és frekvencia tartományban
- 5. Stabilitásvizsgálat
- 6. Minőségi tulajdonságok elemzése
- 7. Bizonytalanságok modellezése
- 8. PID szabályozások tervezése
- 9. Irányítástervezés állapot-visszacsatolással
- 10. Lineáris kvadratikus szabályozótervezés
- 11. Megfigyelőtervezés és szeparációs elv
- 12. H2 irányítások tervezése
- 13. Hinf. szabályozók tervezése
- 14. Rekonfiguráló és hibatűrő irányítások tervezése
- 14.1. Robusztus stabilitás, robusztus performancia
- 14.2. Robusztus stabilitás vizsgálat
- 14.3. Kis erősítések tétele
- 14.4. Robusztus performancia analízis
- 14.5. Struktúrált bizonytalanság
- 14.6. Struktúrált szinguláris érték
- 14.7. Struktúrált szinguláris érték: analízis
- 14.8. Struktúrált szinguláris érték: szintézis
- 15. Nemlineáris irányítások
- 16. Mintavételezett rendszerek irányítása
- 17. Irányítási rendszerek implementálása, beágyazott rendszerek
- 18. Irodalomjegyzék
- 2.1. Kéttömegű lengőrendszer
- 2.2. Gépjármű felfüggesztés modellje
- 2.3. Identifikálandó modell
- 2.4. Zajjal terhelt modell
- 2.5. Mért bemenő és kimenő jelek
- 2.6. Becslési hiba elemzése
- 3.1. Lengő rendszer modellje
- 3.2. Átmeneti függvények különböző kezdeti értékek esetén
- 3.3. Az irányíthatósági alak illusztrációja
- 3.4. A diagonális alak illusztrációja
- 4.1. Lengőrendszer modellje
- 4.2. A 3.1 példa megoldása komplex pólusok esetén
- 4.3. A 3.1 példa megoldása valós pólusok esetén
- 4.4. Frekvencia függvény illusztrációja
- 4.5. 2TP tag frekvencia diagramjai valós pólusok esetén
- 4.6. 2TP tag frekvencia diagramjai komplex pólusok esetén
- 4.7. hatása a Bode diagramra
- 4.8. A 3.3 példa megoldása valós pólusok esetén
- 4.9. A 3.3 példa megoldása komplex pólusok esetén
- 5.1. Nyquist stabilitási kritérium
- 5.2. Nyquist stabilitási kritérium
- 5.3. Nyquist stabilitási kritérium
- 6.1. Időtartományi jellemzők
- 6.2. Időtartományi jellemzők
- 6.3. Időtartományi jellemzők
- 6.4. Időtartományi jellemzők
- 7.1. Példa egy felfüggesztési rendszer modellezésére
- 7.2. Az additív bizonytalanság struktúrája
- 7.3. Bizonytalanság a Nyquist diagramon
- 7.4. A multiplikatív bizonytalanság struktúrája
- 7.5. Bizonytalanság a Bode diagramon
- 7.6. Bizonytalanságok modellezése
- 7.7. A bizonytalan rugóállandó modellezése
- 7.8. A bizonytalan tömeg modellezése
- 7.9. struktúra
- 7.10. struktúra
- 8.1. Soros kompenzátor felépítése
- 8.2. Soros kompenzátor felépítése
- 8.3. Soros kompenzátor felépítése
- 8.4. PID szabályozó struktúrája
- 8.5. Arányos tag hatása
- 8.6. Arányos tag hatása
- 8.7. Arányos tag hatása
- 8.8. PID szabályozó struktúrája
- 8.9. Referenciajel súlyozás
- 8.10. Referenciajel súlyozás
- 8.11. Referenciajel súlyozás
- 8.12. Tuningolás, hangolás
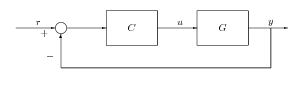
- 9.1. A visszacsatolt (zárt) rendszer blokkdiagramja
- 10.1. A tervezés frekvencia tartományban
- 11.1. Állapotmegfigyelő
- 11.2. Állapotmegfigyelő
- 12.1. Általános rendszerstruktúra
- 12.2. DF zárt kör
- 12.3. DF transzformációja FI-be
- 12.4. felírása két alrendszerrel
- 14.1. struktúra
- 14.2. Kis erősités kapcsolat
- 14.3. Súlyozott kis erősités kapcsolat
- 14.4. Robusztus performancia es stabilitás
- 14.5. Robust performance analysis
- 14.6. Egy lengőrendszer dinamikájának modellezése
- 14.7. A parametrikus bizonytalanságok modellezése
- 14.8. Lengőrendszer modellezése parametrikus bizonytalanságokkal
- 14.9. Lengőrendszer modellje
- 14.10. Lengőrendszer modellje a bizonytalanságokkal
- 14.11. Parametrikus bizonytalanságok hatása a Bode diagramra
- 14.12. iteráció
- 16.1. Számítógéppel irányított rendszer blokkvázlata
- 16.2. A zérus és elsőrendű tartók működésének illusztrációja
- 16.3. Időben diszkrét és folytonos rendszer időtartományi görbéje
- 16.4. Folytonos és diszkrét idejű rendszerek pólusainak kapcsolata
- 17.1. Komplex rendszer moduljai
- 17.2. Jármű pozícióérzékelés és navigáció
- 17.3. Egyszerű beavatkozó szerv illusztrációja
- 17.4. Gépjármű fékrendszer illusztrációja
- 17.5. Gépjármű fékrendszer blokksémája
- 17.6. ESP működése
- 17.7. Egy reaktor sematikus ábrája
- 17.8. Az Ethernet megvalósítása
- 17.9. Beágyazott rendszer illusztrációja
1. fejezet - Bevezetés
Jelen könyv az irányításelmélet és az irányítástervezés módszertanával valamint a megvalósítás kérdéseivel foglalkozik. Az elméleti és módszertani kérdéseken túl kiemelt alkalmazási területként a járműmechatronika kérdéseire koncentrál.
A irányítástechnika pontosabb megfogalmazáshoz meg kell ismerkednünk a rendszer- és irányításelmélet alapjaival. Az irányítástechnika célja, hogy adott rendszerek viselkedését általunk kívánt tulajdonságúvá tegye, továbbá hogy a rendszerek viselkedését megadott szempontoknak, céloknak megfelelővé vagy optimálissá.
A rendszerelmélet formálisan leírja és jellemzi adott (mesterségesen létrehozott vagy természetileg adott) rendszer tulajdonságait egységes, saját fogalomrendszerre építve.
Az irányításelmélet elméleti alapokat és módszertant ad a komplex rendszerek analíziséhez és tervezéséhez úgy, hogy teljesüljenek előírt tulajdonságok, képesek legyenek környezeti változásokhoz adaptálódni, bizonytalanságokra robusztusak legyenek. Az irányítási rendszer megvalósítása mérnöki rendszerekben információ visszacsatolást és számítógépes algoritmusok alkalmazását jelenti. Az információk tipikusan érzékelt és/vagy kommunikált információk lehetnek.
Maguk a rendszerek a valóságban sokfélék lehetnek, tipikusan az egyes diszciplínák szerint tekintve elektromechanikai, mechatronikai, elektronikai, ökológiai, ökonometriai, biológiai, kvantum, illetve információs rendszerek. Alkalmazási szempontból elsősorban a műszaki tudomány területeihez tartozó dinamikus rendszereket említjük. Ilyenek a közúti forgalmi rendszerek, mint dinamikus folyamatok; a gépjárművek, illetve a rajtuk alkalmazott irányítási rendszerek, mint pl. az elektronikus fékezés, kormányzás, valamint az autonóm járművek navigációs rendszerei. Hasonlóképp dinamikus rendszer a légi forgalom és a légi járművek, az információ áramlás az interneten, valamint az ad hoc hálózatokon.
2. fejezet - Mechanikai rendszerek modellezése fizikai elvek alapján
2.1. Modellezési elvek
A modellezés célja:
a rendszerek tulajdonságainak, viselkedésének elemzése, megértése (analízis),
a rendszerek jövőbeli állapotának megjóslása (predikció),
rendszertervezési feladatok megoldása (szintézis),
rendszerek minősítése (validálás).
A modell típusának kiválasztása, vagyis szimuláció vagy irányítás a cél, során figyelembe kell venni az alábbi szempontokat:
cél szempontjából lényeges vonások,
alkalmazható modellezési eljárások,
rendelkezésre álló ismeretanyag,
az esetleges megvalósítás módja, költségei.
Szimulációs cél esetén a rendszer viselkedésének minél pontosabb reprodukálása az irányadó. A bonyolultságnak csak a futtatási idővel szemben támasztott követelmények szabnak határt. Irányítási cél esetén csak azok a rendszertulajdonságok érdekesek, amik az irányítási célt befolyásolják. A bonyolultságnak az elérhető irányítástervezési eljárások lehetőségei szabnak gátat.
A modell jellege a modellezésnél használt módszerek és eszközök függvénye. Ezzel összefüggésben a modellezés kiindulási pontjai szerint a valós fizikai rendszerről szerzet információk forrásai lehetnek elméleti ismeretek illetve gyakorlati ismeretek és feltevések. Az elméleti ismeretek sorába tartoznak az egyes jelenségekről alkotott (fizikai, kémiai, stb.) elméletek által szolgáltatott leírások, amelyek általában (közönséges/parciális) differenciálegyenletek formájában öltenek testet. A gyakorlati ismeretek a rendszerről megfigyelések és mérések által gyűjtött adatok összessége, az elméleti modellekben szereplő egyes paraméterek mért értékeinek ismerete. A feltevések sorába tartozik az alkalmazott modell megbízhatóságáról, érvényességi tartományáról alkotott vélemény.
Osztályozhatjuk még a modellezésnél felhasznált információt azok dinamikája szerint. Így megkülönböztethetünk statikus és dinamikus ismereteket: a statikus ismeretek jellegüknél fogva magukba foglalják a törvények (egyenletek) típusait, a struktúra -- állapotok, egyenletek, tagok -- számát illetve paraméterek (együtthatók) értékének ismeretét. A dinamikus ismeret az időbeli működés leírására koncentrál.
A felhasznált információ forrása lehet a priori: ilyen például az előzetes elemzés, a kapcsolatok feltárása, a modellezés céljának és a pontossági igényeknek meghatározása, a modell típusának megválasztása. Ha ez a forrás a posteriori, akkor a feladat a rendszerről megfigyelések és mérések által gyűjtött információ alapján a modell megalkotása és pontosítása, illetve a modell megbízhatósági/érvényességi tartományának vizsgálata. Általában ekkor beszélünk modell identifikációról és validációról. Amikor a struktúra nem, vagy csak részben, adott struktúra-identifikációról, míg ha a struktúra adott akkor paraméter-identifikációról beszélünk.
A lehetséges modellosztályokat tekintve megkülönböztethetünk statikus és dinamikus modelleket: statikus modell időben nem változó állapotot ír le: a rendszer állapotát algebrai egyenletekkel, vagy idő szerinti deriváltakat nem tartalmazó (parciális) differenciál-egyenletekkel írható le. Elterjedt még a stacionárius, állandósult, illetve egyensúlyi modell kifejezés is. A dinamikus modell a vizsgált rendszer, folyamat jellemzőinek időbeni változását írja le, ami legtöbbször egy közönséges vagy parciális differenciálegyenlet, vagy egyenletrendszer. Lehetséges, hogy a tárgyalás nem az időtartományában, hanem valamely célszerűen megválasztott transzformált tartományában (frekvencia tartomány) valósul meg.
Az egyik legfontosabb osztályozó elv a lineáris illetve nemlineáris viselkedés megkülönböztetése: lineáris modell esetén a folyamatot leíró egyenletrendszer kielégíti a szuperpozíció elvét. A szuperpozíció elvéből következik, hogy lineáris matematikai modellek alakja csak homogén, lineáris egyenlet, illetve egyenletrendszer lehet. Egy nemlineáris modell használatakor a rendszerben lejátszódó folyamatot leíró egyenletek legalább egyike nemlineáris függvényt is tartalmaz. A nemlineáris modellek az egyszerűbb vizsgálat és tervezés érdekében valamilyen linearizálási eljárással lineáris modellekké alakíthatók át.
A modellben szereplő jelek természete szerint modellezhetünk folytonos illetve diszkrét időben: folytonos idejű modell esetén a modellezett rendszert vagy folyamatot leíró jellemzők, független és függő változók a vizsgált idő alatt bármelyik pillanatban vehetnek fel valamilyen értéket: a bemeneti és kimeneti jelei egyaránt folytonos idejű jelek. A folytonos paraméterű/folytonos állapotterű modellekben a változók egy adott tartományon, értékhatáron belül bármilyen értéket felvehetnek. A diszkrét idejű modellben a jellemzők csak adott, konkrét időpillanatokban vehetnek fel értékeket. Diszkrét paraméterű/diszkrét állapotterű modellek esetén a változók csak meghatározott diszkrét értékeket vehetnek fel.
A modellek ezen kívül még lehetnek determinisztikus vagy sztochasztikusak: determinisztikus modell esetén a modellekben szereplő jellemzők, valamint maguk a változók egyértelmű függvényekkel térben és időben egyaránt megadhatók. Sztochasztikus modell esetén a modellek jellemzői csak bizonyos valószínűségi összefüggések felhasználásával adhatók meg.
2.2. Newton-Lagrange-Hamilton modellezés
A Lagrange módszer a rendszer modelljét általánosított elmozdulás és sebesség komponensekkel fogalmazza meg:
| (1) |

ahol  a kinetikai (mozgási) energia,
a kinetikai (mozgási) energia,  a potenciális (helyzeti) energia,
a potenciális (helyzeti) energia,  a disszipációs (csillapítás által elnyelt) energia és
a disszipációs (csillapítás által elnyelt) energia és  egy külső erő. A kinetikus energia a sebességvektoron kívül a helyzetvektortól is függhet, míg a potenciális energia egyedül a helyzetvektortól függ. A kinetikus energia és a potenciális energia különbsége az úgynevezett Lagrange állapotfüggvényt adja meg:
egy külső erő. A kinetikus energia a sebességvektoron kívül a helyzetvektortól is függhet, míg a potenciális energia egyedül a helyzetvektortól függ. A kinetikus energia és a potenciális energia különbsége az úgynevezett Lagrange állapotfüggvényt adja meg:
| (2) |

A Lagrange egyenlet felírható az egyes komponensekre bontott alakban is, azaz  komponensre felírva:
komponensre felírva:
| (3) |

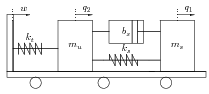
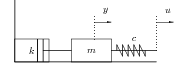
Példa 1.1
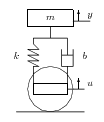
Példaként az 1. ábrán látható két tömegű lengőrendszer modelljét írjuk fel. A lengőrendszer komponensei: az  és
és  tömegek, a
tömegek, a  és
és  rugók, valamint a
rugók, valamint a  csillapítás. A rendszert a
csillapítás. A rendszert a  elmozdulás gerjeszti, ennek hatására a két tömeg elmozdulása
elmozdulás gerjeszti, ennek hatására a két tömeg elmozdulása  és
és  .
.
A modellezési feladat megoldása: első lépésében írjuk fel a Lagrange egyenlet komponenseit:
• Kinetikus energia egy tömegre: a

formula alapján a rendszer két tömegére
| (4) |
adódik.
• Potenciális energia egy tömegre:
ezért a rendszerre:
| (5) |
adódik.
• Disszipációs energia a rendszerre:
| (6) |
A számítási műveletek az egyes komponensekre ( és
és  ) bontott alakban a következők:
) bontott alakban a következők:
| (7) |

| (8) |

| (9) |

| (10) |

Végül a két tömegű lengőrendszer modellje a Lagrange egyenlet alapján:
| (11) |

| (12) |

Megjegyezzük, hogy a Newtoni mechanikában a rendszer modelljét erő és nyomaték egyensúlyi egyenletekkel fogalmazzuk Newton törvényeinek felhasználásával.
2.3. Átviteli függvény
Egy lineáris időinvariáns rendszer modelljének leírása lineáris, állandó együtthatós közönséges differenciál egyenlettel történik:

| (13) |

ahol  és
és  együtthatók konstansok, nem függnek az időtől. Tekintsük a differenciálegyenlet Laplace transzformáltját (
együtthatók konstansok, nem függnek az időtől. Tekintsük a differenciálegyenlet Laplace transzformáltját ( - transzformált) zérus kezdeti feltételekkel. Ekkor a következő egyenlethez jutunk:
- transzformált) zérus kezdeti feltételekkel. Ekkor a következő egyenlethez jutunk:

| (14) |

ahol  .
.
A  racionális törtfüggvényt a rendszer átviteli függvényének nevezzük. Az átviteli függvény tehát a kimenőjel és a bemenőjel zérus kezdeti feltételekkel vett
racionális törtfüggvényt a rendszer átviteli függvényének nevezzük. Az átviteli függvény tehát a kimenőjel és a bemenőjel zérus kezdeti feltételekkel vett  - transzformáltjainak hányadosa.
- transzformáltjainak hányadosa.
| (15) |

Az alábbiakban néhány alaptag átviteli függvényét írjuk fel.
• Arányos tagok: Az egyenletből hiányoznak a bemenőjel és kimenőjel differenciálhányadosai.
| (16) |

• Integráló tagok. Az egyenletben bemenőjel nulladik és a kimenőjel első differenciálhányadosa szerepel.
| (17) |

• Differenciáló tagok: Az egyenletben kimenőjel nulladik és a bemenőjel első differenciálhányadosa szerepel.
| (18) |

• Tárolós tagok: Az egyenletben a kimenőjelnek annyiad rendű differenciálhányadosa szerepel, ahány energiatárolót tartalmaz a tag. Ez a tag biztosítja a rendszerben lévő további dinamikák formalizálását.
Példa 1.2
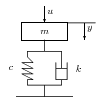
Tekintsük a 1.2 ábrán látható egyszerűsített gépjármű felfüggesztési modellt, melynek adatai a következők:  ,
,  , k=
, k= . Írjuk fel a mechanikai rendszer modelljét.
. Írjuk fel a mechanikai rendszer modelljét.
A feladat megoldása: A rendszer differenciálegyenlete:
| (19) |
Alakítsuk át az egyenleteket Laplace transzformációval:
| (20) |

Végül az átviteli függvény
| (21) |

formában adódik.
2.4. Modellezés mért jelek alapján
A modell rendszerint egy differenciálegyenlet formájában ölt testet. Irányításelméleti alkalmazásokban ezek közönséges differenciálegyenletek, vagy darabonként közönséges differenciálegyenletek (kapcsolt rendszerek, impulzív rendszerek).
Amikor a teljes modellt a priori ismeretek alapján állítjuk fel, amik lehetnek fizikai elvek (Hamilton, Lagrange formalizmus, megmaradási elvek, mérlegegyenletek), akkor fehér doboz (white-box) modellezésről beszélünk. A módszer előnye, hogy a modell fizikai paramétereinek valós tartalma, jelentése van, hátránya viszont, hogy a modell felépítése általában rendkívül bonyolult. Ezen túlmenően a modell-bizonytalanságok kezelése is eléggé problematikus.
Ennek ellenpontja a fekete doboz (black-box) modellezés, amikor is a modell felállításához csak kísérletekkel, mérésekkel lehet információkat szerezni. Ilyen információ forrása lehet például a vizsgálójelekre adott rendszerválaszok (például az átmeneti függvény) elemzése. Elsősorban lineáris időinvariáns (LTI) rendszermodellek esetén használatos. Ha nincs más alapinformáció, akkor kiindulásként, mint matematikai modell, például polinommal történő közelítést biztosító egyenleteket lehet felhasználni. Az black-box modellek lényeges előnye a viszonylagos egyszerűségük; hátrányuk viszont, hogy a paramétereknek általában nincs valós fizikai jelentése.
E két véglet között helyezkedik el a szürke doboz (grey-box) modellezés, ami az előző két módszer kombinációja. Főleg nemlineáris jelenségek modellezésére használatos. Ekkor a struktúra adott -- de nem feltétlenül valamiféle egzakt levezetés eredménye. A (sztatikus) nemlinearitások leírásakor gyakran heurisztikus ismeretek épülnek be a modellbe. A műszaki gyakorlatban legtöbbször ez az eset fordul elő. Hátránya az, hogy a struktúra és a parametrizálás általában nem örződik meg a szokásos diszkretizálási eljárásokban.
Példaként tekintsük az úgynevezett kvázi változó paraméterű lineáris (qLPV) modellezést és paraméterezés: gyakran az
| (22) |

nemlineáris rendszert az
| (23) |

alakban szeretnénk felírni. Ez az átírás azonban általában nem egyértelmű:
| (24) |

ahol
| (25) |

Példa 1.3
| (26) |
| (27) |

| (28) |


ahol
| (29) |
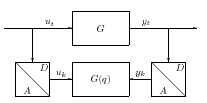
Amikor a rendszer modelljének konstruálása a bemenőjelek és a kimenő jelek mért (mintavételezett) adatai alapján történik, az eljárást modell identifikációnak nevezzük. A mért jelek közötti kapcsolat az alábbi alakban írható fel:
| (30) |

ahol  az úgynevezett eltolás operátor,
az úgynevezett eltolás operátor,  modell leírja a rendszer bemenete és kimenete közötti kapcsolatot, azaz a mintavételezett rendszer átviteli függvényét.
modell leírja a rendszer bemenete és kimenete közötti kapcsolatot, azaz a mintavételezett rendszer átviteli függvényét.
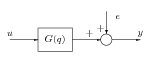
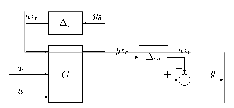
Egy zajjal terhelt lineáris időinvariáns rendszer modelljét mutatja a 4 ábra. A zajos rendszer modellje:
| (31) |

ahol  eltolás operátor,
eltolás operátor,  zaj (zavarás).
zaj (zavarás).
A rendszeridentifikáció végrehajtása több lépésben történik:
Bemenő és kimenő jelek mérése, mintavételezése, szűrése, feldolgozása (transzformációja).
Modell struktúrájának becslése fizikai megfontolások alapján.
Modell paramétereinek becslése.
Modell ellenőrzése, tesztelése, validálása.
Diszkrét modell transzformálása folytonos alakra.
A rendszermodell általános alakja:
| (32) |

ahol  átviteli függvény és
átviteli függvény és  az eltolás operátor. Például:
az eltolás operátor. Például:
| (33) |

ahol  és
és  polinomok az eltolás operátor szerint a következő alakúak:
polinomok az eltolás operátor szerint a következő alakúak:
| (34) |

| (35) |

A modell ARX struktúrája
| (36) |

ahol
| (37) |
| (38) |

A modell struktúráját a kimenet korábbi kimeneteinek száma, a korábbi bemenetek száma és a bemenőjel eltolása határozza meg:
| (39) |

ahol  a modell paraméterei. Átrendezve:
a modell paraméterei. Átrendezve:

| (40) |

A paraméterbecslés eredménye:
| (41) |

ahol  a modell becsült paraméterei. A paraméterbecslés modellje kifejtve a következő:
a modell becsült paraméterei. A paraméterbecslés modellje kifejtve a következő:
| (42) |

A modell alapján a kimenőjel  -edik értékére becslés adható:
-edik értékére becslés adható:
| (43) |

Az előrejelzés hibája:
| (44) |
minden  -re.
-re.
Az n-edrendű ARX modell alakja:

| (45) |

Vezessük be a következő jelölést:
| (46) |

| (47) |

ahol  a mért jelek,
a mért jelek,  a paraméterek halmaza. A kimenőjel:
a paraméterek halmaza. A kimenőjel:
| (48) |

| (49) |

| (50) |

| (51) |

A modell kompakt alakja:
| (52) |
ahol
| (53) |

| (54) |

| (55) |

| (56) |

Az LS becslés azt a paramétervektort keresi, amelynél az  hiba négyzetösszege a legkisebb. Az LS kritériumot a következő alakban definiáljuk:
hiba négyzetösszege a legkisebb. Az LS kritériumot a következő alakban definiáljuk:
| (57) |
ami skaláris szorzat alakban is felírható:
| (58) |

ahol  a paramétereket tartalmazó vektor. Az LS becslés egy optimalizáló eljárás, melynek során a paraméterbecslési eljárás eredményét a következő költségfüggvény minimalizálásával kapjuk:
a paramétereket tartalmazó vektor. Az LS becslés egy optimalizáló eljárás, melynek során a paraméterbecslési eljárás eredményét a következő költségfüggvény minimalizálásával kapjuk:
| (59) |
Az LS kritérium kifejtve:
| (60) |

| (61) |

A minimum parciális deriválttal számítható:
| (62) |
Az optimális megoldás:
| (63) |
| (64) |
amit az LS becslésre vonatkozó normálegyenletnek nevezzük.
A gyakorlati alkalmazásokból ismert tény, hogy a becslési hiba az idő fügvényében egyre nagyobb értékeket vesz fel. Ezért a becslési hiba súlyozását is érdemes bevinni a kritériumba.
| (65) |

ahol  , illetve
, illetve  súlyozó tényező. Abban a tartományban, ahol nagyra választjuk, a becslés pontosabb lesz, mint ahol kisebbre választjuk. A normálalak összefüggése a következőképpen változik.
súlyozó tényező. Abban a tartományban, ahol nagyra választjuk, a becslés pontosabb lesz, mint ahol kisebbre választjuk. A normálalak összefüggése a következőképpen változik.
| (66) |

| (67) |

Ezt a kifejezést a súlyozott LS becslésre vonatkozó normálegyenletnek nevezzük.
A becsült modell validáció vizsgálatára a gyakorlatban elterjedt módszer a hiba statisztikai vizsgálata, amikor is olyan kérdésekre várunk választ, mint: milyen a mért jel előrejelzett jellel való illesztése, illetve mennyire mondható el az  jelről a fehérzaj tulajdonság.
jelről a fehérzaj tulajdonság.
Az identifikált modell tulajdonságait a rendszer tulajdonságaival való összehasonlítása. A vizsgálat mind idő, mind frekvenciatartományban elvégezhető.
Példa 1.4
Tegyük fel, hogy adott egy paramétereiben nem ismert másodfokú rendszer.
| (68) |

ahol  ,
,  és
és  .
.
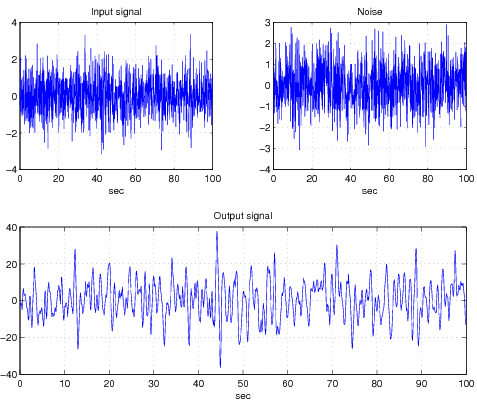
Tegyük fel, hogy a másodfokú rendszer bemenő és kimenő jeleit  lépésenként mérjük. A mért mintát illusztrálja a 1.4 ábra.
lépésenként mérjük. A mért mintát illusztrálja a 1.4 ábra.
A feladat megoldása: A modellt s következő ARX struktúrában keressük:
| (69) |
ahol  és
és  . A paraméterbecslést legkisebb négyzetes módszerrel hajtjuk végre.
. A paraméterbecslést legkisebb négyzetes módszerrel hajtjuk végre.
| (70) |

| (71) |

Kiszámítjuk az előrejelzett kimenetet és ezt a mért kimenethez hasonlítjuk. Elvégezzük a hiba kimenet (reziduál) elemzését.
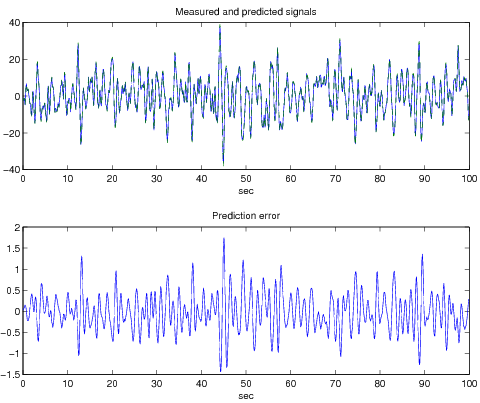
Hiba átlag:  , szórás:
, szórás:  . A modell által generált jel és a mért jel illesztése az eltérés jelével együtt a 1.4 ábrán látható.
. A modell által generált jel és a mért jel illesztése az eltérés jelével együtt a 1.4 ábrán látható.
3. fejezet - Rendszerek modellezése állapottérben
3.1. Az állapottér elmélet alapjai
A rendszer állapota egy  időpontbeli információ (olyan jelek ismerete), amelyből az
időpontbeli információ (olyan jelek ismerete), amelyből az  ,
,  bemenőjel ismeretében a rendszer válasza minden
bemenőjel ismeretében a rendszer válasza minden  időpontra meghatározható.A rendszer válasza a jövőbeli,
időpontra meghatározható.A rendszer válasza a jövőbeli,  időpontra vonatkozó állapotokat és a kimenőjeleket jelenti. A rendszer állapotait leíró jeleket, illetve ezek függvényeit, a rendszer állapotváltozóinak nevezzük.
időpontra vonatkozó állapotokat és a kimenőjeleket jelenti. A rendszer állapotait leíró jeleket, illetve ezek függvényeit, a rendszer állapotváltozóinak nevezzük.
Példa 2.1
Tekintsük az alábbi felfüggesztési rendszert. Az  erő hatására az
erő hatására az  tömeg függőleges irányban (
tömeg függőleges irányban ( ) elmozdul. Írjuk fel az erő és az elmozdulás közötti kapcsolatot. A feladat numerikus adatai:
) elmozdul. Írjuk fel az erő és az elmozdulás közötti kapcsolatot. A feladat numerikus adatai:  ,
,  ,
,  .
.
A feladat megoldása: A rendszer differenciálegyenlete:
| (72) |
| (73) |
Állapotváltozók megválasztásának egy természetes módja a következő:
| (74) |
Ezzel a választással az állapotegyenletek alakja:
| (75) |

| (76) |

| (77) |

míg az állapottér reprezentáció:
| (78) |
| (79) |

Természetesen egy másik állapottér megválasztás is lehetséges:
| (80) |

Ezzel a választással az állapotegyenletek alakja
| (81) |

| (82) |

| (83) |

a hozzá tartozó állapottér reprezentáció pedig:
| (84) |
| (85) |
Fentiek alapján látható, hogy a bemenőjelek és kimenőjel közötti kapcsolat állapottér reprezentációja többféle alakban felírható és az állapottér alakja nem egyértelmű.
Az állapotegyenlet, mint egy elsőrendű differenciálegyenlet megoldása két lépésben történik. Előbb megoldjuk a homogén egyenletet, majd megkeressük az inhomogén egyenlet egy partikuláris megoldását. A homogén egyenlet alakja:
| (86) |

az  kezdeti feltétellel és megoldása:
kezdeti feltétellel és megoldása:
| (87) |

ahol az  mátrix-exponenciális függvényt a következőképpen értelmezzük:
mátrix-exponenciális függvényt a következőképpen értelmezzük:
| (88) |
Például diagonál reprezentációk esetén, azaz  (
( ) választással ennek alakja:
) választással ennek alakja: 
Az inhomogén egyenlet alakja:
| (89) |

ahol  egyenlet megoldása a következő:
egyenlet megoldása a következő:
| (90) |
A fentiek alapján az elsőrendű differenciálegyenlettel leírt állapotegyenlet megoldása:
| (91) |
| (92) |

Példa 2.2
Határozzuk meg a  rendszer válaszát egységugrás bemenet esetén.
rendszer válaszát egységugrás bemenet esetén.
A feladat megoldása:
1. lépés A homogén rész megoldása:
| (93) |

| (94) |

| (95) |

A példában:
| (96) |
A homogén rész megoldása a mátrix tagjainak inverz Laplace transzformációjával történik:
| (97) |

2. lépés Az inhomogén rész megoldása zérus kezdeti érték feltételezésével:
| (98) |

| (99) |

| (100) |

A példában:
| (101) |
Az inhomogén rész megoldása a mátrix tagjainak inverz Laplace transzformációjával történik:
| (102) |
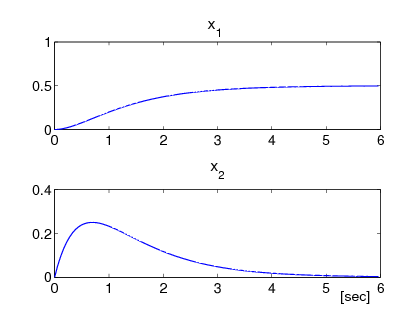
A teljes megoldás:
| (103) |

Ha a kezdeti értékek zérusok, azaz  és
és  :
:
| (104) |
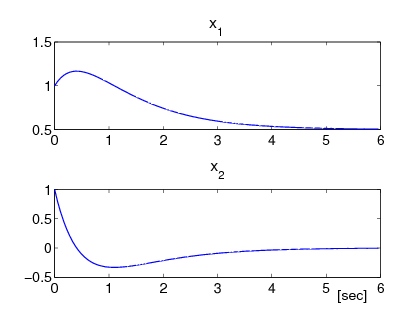
Ha a kezdeti értékek egységnyiek, azaz  és
és  , akkor:
, akkor:
| (105) |
zérus kezdeti értékeknem zérus kezdeti értékek
3.1.1. Állapottér és átviteli függvény kapcsolata
Általánosan egy lineáris dinamikus rendszer állapottér reprezentációját a következő alakban írhatjuk:
| (106) |

| (107) |

Az állapottér reprezentáció alapján a rendszer átviteli függvényét a Laplace transzformáció alkalmazásával kapjuk meg:
| (108) |

ebből az állapot Laplace transzformáltja:
| (109) |

ahol  a kezdő állapot a
a kezdő állapot a  időpontban. Az
időpontban. Az  feltétel mellett
feltétel mellett
| (110) |

A  átviteli függvény:
átviteli függvény:
| (111) |
Az átviteli függvény pólusai tehát az
| (112) |
egyenlet gyökei.
3.1.2. Irányíthatósági állapottér reprezentációk
Az irányíthatósági alakú állapottér reprezentáció a 9 ábrával illusztrálható és az alábbi alakban írható fel:
| (113) |
| (114) |

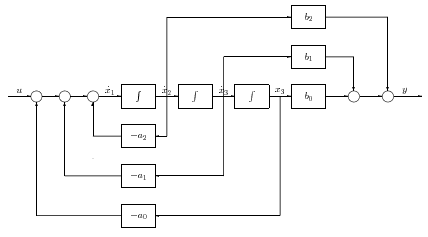
Induljunk ki egy általános rendszerből, melynek átviteli függvényét az alábbi alakban fogalmaztuk meg:
| (115) |
ahol  és
és  polinomiális függvények, például
polinomiális függvények, például  és
és  . A bemenőjel Laplace transzformáltja
. A bemenőjel Laplace transzformáltja  és a kimenőjel Laplace transzformáltja
és a kimenőjel Laplace transzformáltja  közötti kapcsolatot ekkor a következőképp írhatjuk:
közötti kapcsolatot ekkor a következőképp írhatjuk:
| (116) |

Vezessük be a  változót az alábbi módon:
változót az alábbi módon:
| (117) |
Ekkor a bemenőjel és a kimenőjel Laplace transzformáltja:
| (118) |

| (119) |

Inverz Laplace transzformációval a differenciálegyenlet:

| (120) |
Vezessük be a következő új változókat, amelyeket állapotváltozóknak nevezünk:
| (121) |
Figyelembe véve, hogy  és
és  , az alábbi elsőrendű differenciál egyenletekhez jutunk, melyek az állapotdinamika egyenletrendszerét alkotják:
, az alábbi elsőrendű differenciál egyenletekhez jutunk, melyek az állapotdinamika egyenletrendszerét alkotják:
| (122) |

| (123) |

Az állapotváltozókból a rendszer kimenőjele a következőképp kapható meg. Ez az úgynevezett megfigyelési egyenlet.
| (124) |

Az állapotegyenletek mátrixos alakban felírva:
| (125) |
| (126) |

ahol
| (127) |

Vizsgáljuk meg egy két állapotú rendszerben, hogy az irányíthatósági alak egyértelműségét. Induljunk ki az (125)-(126) kétállapotú általános leírásból. Az átviteli függvény és az állapottér reprezentáció közötti összefüggés alapján írjuk fel az átviteli függvényt:

| (128) |

Az átviteli függvény alapján jól látható, hogy az irányíthatósági alak egyértelműen felírható. Az  mátrix első sorának elemei az átviteli függvény nevezőjének együtthatóiként, míg a
mátrix első sorának elemei az átviteli függvény nevezőjének együtthatóiként, míg a  vektor elemei az átviteli függvény számlálójának együtthatóiként jelennek meg.
vektor elemei az átviteli függvény számlálójának együtthatóiként jelennek meg.
3.1.3. Megfigyelhetőségi állapottér reprezentációk
Az irányíthatósági alak és a megfigyelhetőségi alak felírási módja között a dualitás teremt kapcsolatot. A két állapottér ekvivalens alakjai:
| (129) |

| (130) |

| (131) |

Vizsgáljuk meg az irányíthatósági és a megfigyelhetőségi alakok ekvivalenciáját. Írjuk fel az átviteli függvényt mindkét esetben egy kétállapotú állapottér reprezentáció esetére. Az irányíthatósági alakot (125) és (125) szerint vesszük:
| (132) |

Vizsgáljuk meg a megfigyelhetőségi alakot is. Az állapotegyenletek mátrixos alakban felírva:
| (133) |
| (134) |

ahol
| (135) |

Vizsgáljuk meg egy két állapotú rendszerben, hogy az irányíthatósági és a megfigyelhetőségi alakok ekvivalensek. Induljunk ki az (125)-(126) kétállapotú általános leírásból. Az átviteli függvény és az állapottér reprezentáció közötti összefüggés alapján írjuk fel az átviteli függvényt:

| (136) |

Az átviteli függvények alapján jól látható, hogy az irányíthatósági alak és a megfigyelhetőségi alakok ekvivalensek.
3.1.4. Diagonális állapottér reprezentációk
Az diagonális alakú állapottér reprezentáció a 10 ábrával illusztrálható és az alábbi alakban írható fel:
| (137) |
| (138) |
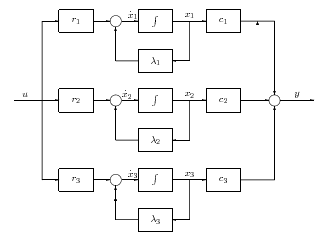
Tegyük fel, hogy adott egy rendszer kimenete az átviteli függvényének parciális tört alakú felbontásával:
| (139) |

ahol  ,
,  az
az  karakterisztikus egyenlet gyökei,
karakterisztikus egyenlet gyökei,  ,
,  pedig a
pedig a  ,
,  gyökökhöz (a
gyökökhöz (a  átviteli függvény pólusaihoz) tartozó rezidumok:
átviteli függvény pólusaihoz) tartozó rezidumok:
| (140) |

| (141) |

Megjegyezzük, hogy ennél a felírásnál  és
és  konvex pólusok is lehetnek. Vezessük be új változóként az
konvex pólusok is lehetnek. Vezessük be új változóként az  ,
,  változókat, melyekre
változókat, melyekre
| (142) |
| (143) |
| (144) |

amiből az alábbi egyenletek írhatók fel:
| (145) |

| (146) |

Az állapotegyenletek mátrixos alakban felírva:
| (147) |
| (148) |

ahol az  jelölésben a
jelölésben a  index az
index az  mátrix diagonális alakjára utal,
mátrix diagonális alakjára utal,
| (149) |

Vizsgáljuk meg egy két állapotú rendszerben a diagonális alak egyértelműségét. Induljunk ki az (147)-(148) kétállapotú általános leírásból. Mivel sem  sem
sem  alakjára nézve nincs megkötés, ezért ezeket válasszuk meg a következőképpen:
alakjára nézve nincs megkötés, ezért ezeket válasszuk meg a következőképpen:
| (150) |
Az átviteli függvény és az állapottér reprezentáció közötti összefüggés alapján írjuk fel az átviteli függvényt:

| (151) |
Az átviteli függvény alapján látható, hogy a diagonális alak felírása nem egyértelmű. Habár az átviteli függvény nevezője alapján  egyértelműen felírható (a pólusok sorrendjének megválasztásától eltekintve),
egyértelműen felírható (a pólusok sorrendjének megválasztásától eltekintve),  és
és  elemeinek megválasztása nem egyértelmű.
elemeinek megválasztása nem egyértelmű.
Példa 2.3
Határozzuk meg a 1.2 ábrán látható egyszerűsített gépjármű felfüggesztési modelljét irányíthatósági alakban. A feladata numerikus adatai:  ,
,  , k=
, k= .
.
A feladat megoldása: a 1.2 példa megoldása alapján induljunk ki az átviteli függvény alakból:
| (152) |
Vezessünk be egy új változót:
| (153) |
Inverz Laplace transzformációval:
| (154) |
Az állapotváltozókat a  deriváltjai csökkenő rendje szerint választjuk:
deriváltjai csökkenő rendje szerint választjuk:  és
és  . Ekkor az állapotok deriváltjai:
. Ekkor az állapotok deriváltjai:  és
és  . A kimeneti jel:
. A kimeneti jel:  . Az állapottér reprezentáció irányíthatósági alakban:
. Az állapottér reprezentáció irányíthatósági alakban:
| (155) |
| (156) |
3.1.5. Állapottér transzformációk
Vizsgáljuk azt az esetet, amikor egy adott  állapotvektorból egy új
állapotvektorból egy új  állapotvektort képezünk az alábbi módon:
állapotvektort képezünk az alábbi módon:
| (157) |

ahol  egy
egy  méretű nemszinguláris transzformációs mátrix, és
méretű nemszinguláris transzformációs mátrix, és  ,
,  . Ha az
. Ha az  állapotvektor az
állapotvektor az  állapottér reprezentációhoz tartozik, azaz
állapottér reprezentációhoz tartozik, azaz
| (158) |

| (159) |

Határozzuk meg az  állapotvektor
állapotvektor
| (160) |

| (161) |

egyenletekben szereplő  mátrixokat. Mivel
mátrixokat. Mivel  , ezt behelyettesítve az állapotegyenletbe kapjuk, hogy
, ezt behelyettesítve az állapotegyenletbe kapjuk, hogy
| (162) |
| (163) |

azaz
| (164) |
| (165) |

Állapottér reprezentációk közötti kapcsolat
| (166) |

| (167) |

| (168) |

Az  és
és  mátrixok közötti fenti kapcsolatot hasonlósági transzformációnak nevezzük. Egy rendszer adott dimenziós állapottér reprezentációi egymásból hasonlósági transzformációval kaphatók.
mátrixok közötti fenti kapcsolatot hasonlósági transzformációnak nevezzük. Egy rendszer adott dimenziós állapottér reprezentációi egymásból hasonlósági transzformációval kaphatók.
Az irányíthatósági alakú állapottér reprezentációt előállító transzformációs mátrix alakja:
| (169) |

ahol n dimenziós állapottér esetén  az irányíthatósági mátrix:
az irányíthatósági mátrix:
| (170) |

és  egy
egy  dimenziós Toeplitz-mátrix:
dimenziós Toeplitz-mátrix:
| (171) |
amelynek elemei a karakterisztikus egyenlet együtthatói:
| (172) |

Ekkor az irányíthatósági állapottér alak
| (173) |

A diagonális alakú állapottér reprezentációt előállító transzformációs mátrix alakja:
| (174) |

ahol  egy
egy  dimenziós Vandermonde-mátrix:
dimenziós Vandermonde-mátrix:
| (175) |
A diagonális állapottér alak:
| (176) |

Példa 2.4
Határozzuk meg az alábbi rendszer irányíthatósági alakját előállító transzformációs mátrixot.
| (177) |
A feladat megoldása: az irányíthatósági alak transzformációs mátrixa:
| (178) |

ahol 
| (179) |
| (180) |
Az irányíthatósági alak:
| (181) |
3.2. Irányíthatóság és megfigyelhetőség
Állapot megfigyelhetőség: adott  . Mi a feltétele annak, hogy az
. Mi a feltétele annak, hogy az  állapotokat minden a
állapotokat minden a  időpontra meghatározhassuk a rendszer jövőbeli input és output függvényeinek ismeretében?
időpontra meghatározhassuk a rendszer jövőbeli input és output függvényeinek ismeretében?
Definíció 2.1
Az  mátrixot a rendszer megfigyelhetőségi mátrixának nevezzük.
mátrixot a rendszer megfigyelhetőségi mátrixának nevezzük.
| (182) |

Tétel 2.1 Kálmán-féle rangfeltétel
Egy  pár megfigyelhető akkor és csak akkor, ha megfigyelhetőségi mátrixuk rangja megegyezik az állapottér dimenziójával, azaz
pár megfigyelhető akkor és csak akkor, ha megfigyelhetőségi mátrixuk rangja megegyezik az állapottér dimenziójával, azaz
| (183) |
Állapot irányíthatóság: adott  , és
, és  a
a  időpontban. Mi a feltétele annak, hogy találjunk olyan
időpontban. Mi a feltétele annak, hogy találjunk olyan  ,
,  irányítást, amely a rendszert véges
irányítást, amely a rendszert véges  idő alatt az
idő alatt az  állapotból egy tetszőleges
állapotból egy tetszőleges  ,
,  állapotba vigye?
állapotba vigye?
Definíció 2.2
Az  mátrixot a diszkrét idejű rendszer irányíthatósági mátrixának nevezzük.
mátrixot a diszkrét idejű rendszer irányíthatósági mátrixának nevezzük.
| (184) |

Tétel 2.2 Kálmán-féle rangfeltétel
Egy  pár akkor és csak akkor irányítható, ha irányíthatósági mátrixuk rangja megegyezik az állapottér dimenziójával, azaz
pár akkor és csak akkor irányítható, ha irányíthatósági mátrixuk rangja megegyezik az állapottér dimenziójával, azaz
| (185) |
Definíció 2.3
Egy rendszer  állapottér reprezentációja minimál reprezentáció, ha együttesen irányítható és megfigyelhető, azaz
állapottér reprezentációja minimál reprezentáció, ha együttesen irányítható és megfigyelhető, azaz
| (186) |

A minimál reprezentációkhoz tartozó állapotér dimenziója a legkisebb az összes olyan  állapottér reprezentációkat tekintve, amelyekre
állapottér reprezentációkat tekintve, amelyekre
| (187) |
ahol  a rendszer átviteli függvénye.
a rendszer átviteli függvénye.
Kálman féle dekompozíció: az irányíthatóság és megfigyelhetőség koncepciója lehetővé teszi, hogy megértsük egy lineáris rendszer struktúráját.
Lineáris rendszerek négy alrendszerre bonthatók:
(a)  irányítható és megfigyelhető
irányítható és megfigyelhető
(b)  irányítható és nem megfigyelhető
irányítható és nem megfigyelhető
(c)  nem irányítható és megfigyelhető
nem irányítható és megfigyelhető
(d)  nem irányítható és nem megfigyelhető
nem irányítható és nem megfigyelhető

Példa 2.5
Vizsgáljuk az alábbi diagonális állapottér reprezentáció megfigyelhetőségét és irányíthatóságát:
| (188) |
| (189) |

A feladat megoldása: a megfigyelhetőségi mátrix alakja:
| (190) |
A rangfeltételt a következőképp vizsgálhatjuk:  akkor, ha
akkor, ha  . Az adott feladatban:
. Az adott feladatban:  , azaz a megfigyelhetőség teljesül, ha akkor és csak akkor, ha
, azaz a megfigyelhetőség teljesül, ha akkor és csak akkor, ha  .
.
Az irányíthatósági mátrix:
| (191) |
Az irányíthatósági mátrix rangja éppen  ha
ha
| (192) |

azaz 
Példa 2.6
Vizsgáljuk meg az alábbi állapottér reprezentációval adott rendszer irányíthatóságát és megfigyelhetőségét.
| (193) |
A feladat megoldása: Írjuk fel az irányíthatósági mátrixot:
| (194) |
Megfigyelhetőség ellenőrzése: egy mátrix rangja elemi mátrixműveletekkel vizsgálható. A teljes rang vizsgálata a mátrix determinánsának kiszámításával is meghatározható:  . A rendszer tehát irányítható. Írjuk fel a megfigyelhetőségi mátrixot:
. A rendszer tehát irányítható. Írjuk fel a megfigyelhetőségi mátrixot:
| (195) |
Mivel  , ezért a rendszer megfigyelhető.
, ezért a rendszer megfigyelhető.
4. fejezet - Rendszerek elemzése idő és frekvencia tartományban
4.1. Időtartományi elemzés
Definíció 3.1 (Súlyfüggvény)
A bemenőjel -- kimenőjel kapcsolatot leírhatjuk az ún. Dirac-delta függvényre adott válaszfüggvény segítségével is.
A Dirac-delta függvényt a következőképp definiáljuk:
| (196) |
A Dirac-delta bemenőjelre adott válaszfüggvény a rendszer súlyfüggvényének nevezzük.
A súlyfüggvény segítségével egy tetszőleges bemenőjelre adott válaszfüggvény:
| (197) |
Definíció 3.2
A bemenőjel - kimenőjel kapcsolatot leírhatjuk az egységugrás függvényre adott válaszfüggvény segítségével is.
Az egységugrás függvényt a következőképp definiáljuk:
| (198) |
Az egységugrás bemenőjelre adott válaszfüggvény a rendszer átmeneti függvényének nevezzük.
Az átmeneti függvény segítségével egy tetszőleges bemenőjelre adott válaszfüggvény:
| (199) |
A Dirac-delta bemenőjelre adott válaszfüggvény a rendszer súlyfüggvényének nevezzük. A Dirac-delta függvény ( ) Laplace transzformáltja:
) Laplace transzformáltja:  . Emiatt
. Emiatt  .
.
| (200) |
Az egységugrás bemenőjelre adott válaszfüggvény a rendszer átmeneti függvényének nevezzük. A egységugrás függvény ( ) Laplace transzformáltja:
) Laplace transzformáltja:  .Emiatt
.Emiatt  .
.
| (201) |
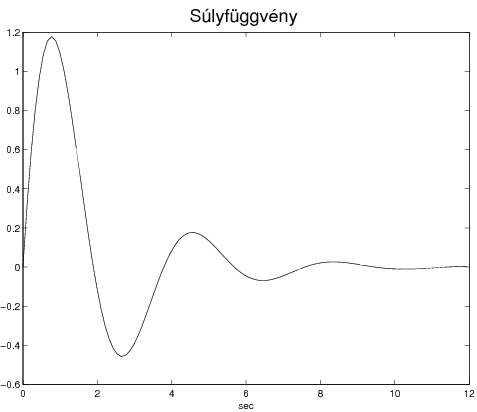
Példa 3.1
Írjuk fel a 3.1 ábrán látható tömegből, rugóból és csillapítóból álló mechanikai rendszer átviteli függvényét.
Az átviteli függvény Laplace transzformációval:
| (202) |
Két pólusa van, amelyek a fizikai paraméterektől függően valósak, vagy komplexek lehetnek:  Súlyfüggvény számítása
Súlyfüggvény számítása
| (203) |
Komplex pólusok esetén ( és
és  ) további számítások szükségesek:
) további számítások szükségesek:
| (204) |
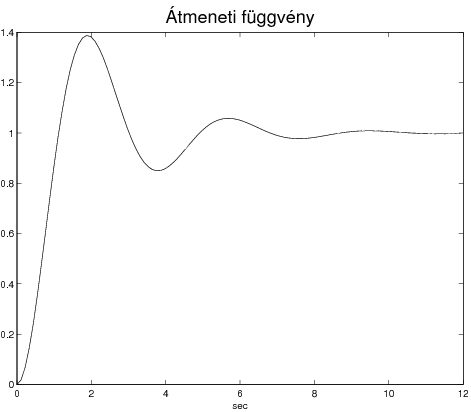
Kihasználtuk a szögfüggvényekre vonatkozó  Euler összefüggést. Átmeneti függvény számítása:
Euler összefüggést. Átmeneti függvény számítása:
| (205) |
Komplex pólusok esetén ( és
és  ) további számítások szükségesek:
) további számítások szükségesek:

| (206) |

Komplex pólusok esete: az adatok:  ,
,  ,
,  .
.
Két komplex konjugált pólus van: a  és
és . A súlyfüggvény és az átviteli függvény a reziduum tétel alkalmazásával számítható:
. A súlyfüggvény és az átviteli függvény a reziduum tétel alkalmazásával számítható:
| (207) |

| (208) |

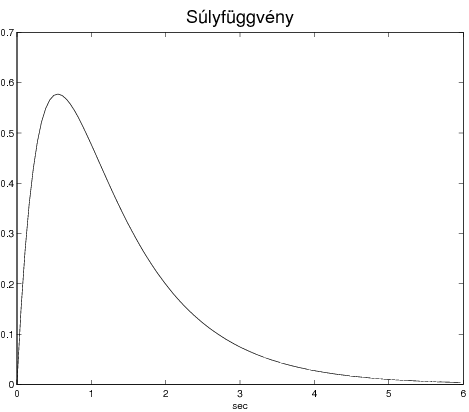
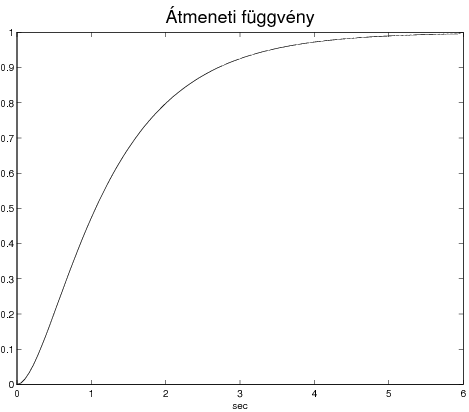
Valós pólusok esetén az adatok:  ,
,  ,
,  .
.
Valós pólusai vannak:  és
és  . A súlyfüggvény és átviteli függvény a reziduum tétel alkalmazásával számítható:
. A súlyfüggvény és átviteli függvény a reziduum tétel alkalmazásával számítható:
| (209) |

| (210) |

4.2. Frekvencia tartományi elemzés
Egy rendszer frekvencia függvényének a rendszernek szinuszos bemenőjelre, állandósult állapotban adott válaszfüggvényét nevezzük.

Itt a bemenőjel egy egységnyi amplitúdójú szinusz lefutású jel, amelynek körfrekvenciája  .
.
| (211) |

A kimenőjel:
| (212) |

Az  függvényt amplitudó függvénynek, a bemenőjel és a kimenőjel közötti fáziseltolást jelentő
függvényt amplitudó függvénynek, a bemenőjel és a kimenőjel közötti fáziseltolást jelentő  függvényt pedig fázisfüggvénynek nevezzük, mindkettő a bemenőjel
függvényt pedig fázisfüggvénynek nevezzük, mindkettő a bemenőjel  körfrekvenciájától függ.
körfrekvenciájától függ.
Az amplitudó függvény a  függvény abszolút értékeként kapható:
függvény abszolút értékeként kapható:
| (213) |
a fázisfüggvény pedig  fázisfüggvényeként:
fázisfüggvényeként:
| (214) |
Legyen egy rendszer átviteli függvénye:
| (215) |

A rendszer bemenete egy egységnyi amplitúdójú szinusz lefutású jel  körfrekvenciával:
körfrekvenciával:  .
.
A  -transzformáció alkalmazásával vizsgáljuk meg a rendszer kimenőjelét.
-transzformáció alkalmazásával vizsgáljuk meg a rendszer kimenőjelét.
| (216) |

Időtartományba transzformálva:

| (217) |

Elvégezve a megfelelő határértékképzéseket:
| (218) |

Megjegyzés 3.1 Egy  komplex szám exponenciális alakja
komplex szám exponenciális alakja  ahol
ahol  és
és  .
.
Alkalmazva az összefüggést:
| (219) |

ahol  .
.
| (220) |

majd felhasználva az Euler-összefüggést ( ):
):
a kimenőjelre a következő adódik:
| (221) |

A kimenőjel első tagja a tranziens időtartamában exponenciálisan nullához tart. Az állandósult állapotot a második tag határozza meg.
Az állandósult állapotra azt kapjuk, hogy
| (222) |

ahol  Állandósult állapotban tehát a rendszer egy adott körfrekvenciájú szinuszos lefolyású bemenőjelre egy szinuszos lefolyású kimenőjellel válaszol, amelynek amplitúdóját az
Állandósult állapotban tehát a rendszer egy adott körfrekvenciájú szinuszos lefolyású bemenőjelre egy szinuszos lefolyású kimenőjellel válaszol, amelynek amplitúdóját az  függvény, a bemenőjel és a kimenőjel közötti fáziseltolást pedig a
függvény, a bemenőjel és a kimenőjel közötti fáziseltolást pedig a  függvény méri.
függvény méri.
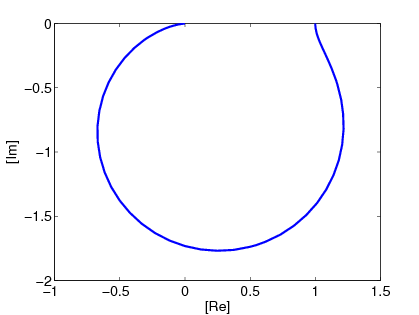
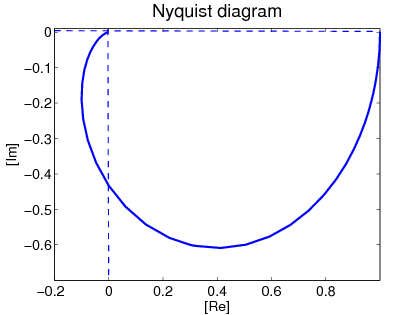
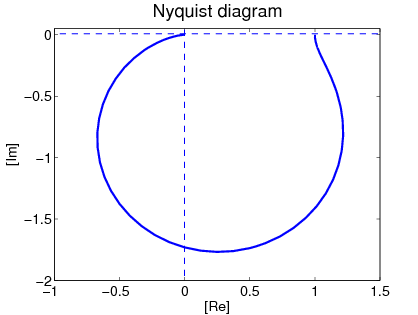
Definíció 3.3
Nyquist diagram A frekvencia függvény ábrázolásának egyik módja az, amikor az amplitudó függvényt mint vektort egy polár koordináta rendszerben ábrázoljuk a hozzátartozó  függvény segítségével, ahol az
függvény segítségével, ahol az  hosszúságú vektornak a pozitív valós tengellyel bezárt szöge épp a
hosszúságú vektornak a pozitív valós tengellyel bezárt szöge épp a  szög. A frekvencia függvénynek ezt az ábrázolásmódját Nyquist -- diagramnak nevezzük.
szög. A frekvencia függvénynek ezt az ábrázolásmódját Nyquist -- diagramnak nevezzük.
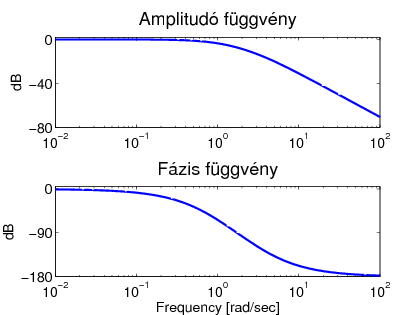
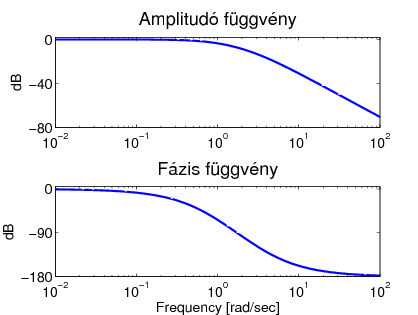
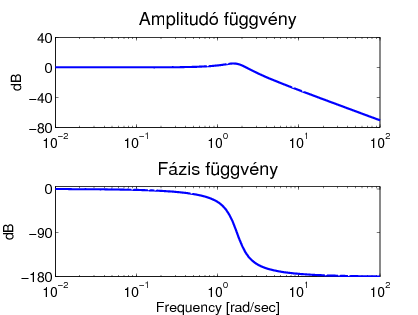
Definíció 3.4
Bode diagram A frekvencia függvények egy másik ábrázolásmódja az, amikor az
| (223) |

amplitúdó függvényt a  függvényében ábrázoljuk, decibelben. Ennek alapján a függőleges tengelyen
függvényében ábrázoljuk, decibelben. Ennek alapján a függőleges tengelyen  szerepel. Ebben az esetben a
szerepel. Ebben az esetben a
| (224) |

fázisfüggvényt külön diagramban, a  függvényében ábrázoljuk. Ezt az ábrázolást a rendszer Bode -- diagramjának nevezzük.
függvényében ábrázoljuk. Ezt az ábrázolást a rendszer Bode -- diagramjának nevezzük.
Példa 3.2
A kéttárolós arányos tag (2TP) Nyquist diagramját a két különböző időállandójú egytárolós tag Nyquist diagramjának összeszorzásával kapjuk. (Az eredő vektor abszolút értéke a két vektor abszolút értékeinek szorzata, fázisszöge a két vektor fázisszögének összege.)
| (225) |


eset (valós pólusok):


| (226) |

| (227) |

A frekvenciafüggvény két egytárolós tag frekvencia függvényének szorzataként írható fel. Mivel logaritmikus síkon a szorzásnak összeadás felel meg, a két egytárolós tag Bode diagramját összegezve kapjuk az eredő Bode diagramot.
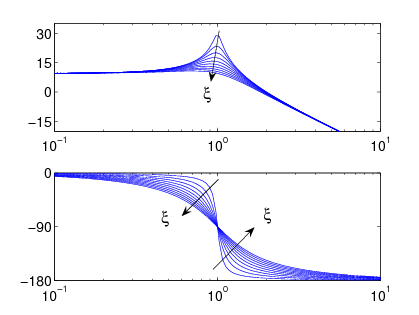
Komplex pólusok esete:  eset (komplex pólusok):
eset (komplex pólusok):


| (228) |

Vizsgáljuk meg a jelleggörbe menetét:
| (229) |
Ha  a pontos görbe a közelítő egyenesek alatt fut, ha
a pontos görbe a közelítő egyenesek alatt fut, ha  a pontos görbe az egyenesek fölött halad, míg
a pontos görbe az egyenesek fölött halad, míg  esetén a pontos és a közelítő érték
esetén a pontos és a közelítő érték  -nél megegyezik.
-nél megegyezik.

eset (komplex pólusok): A fázis görbe alakja ugyancsak a  -től függ:
-től függ:
| (230) |
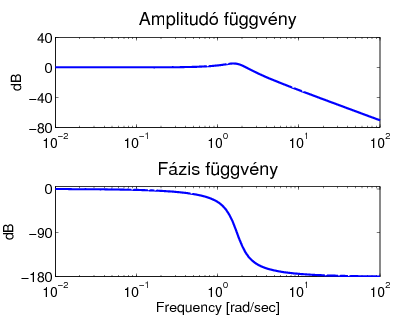
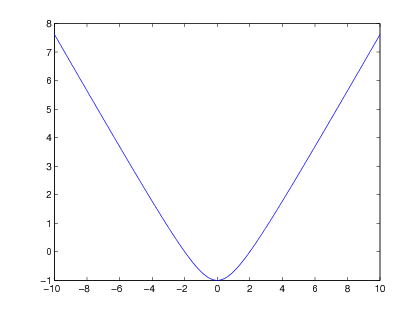
A 3.2 ábra  változó különböző értékeinek hatását illusztrálja az amplitúdó és fázisgörbe függvényekben.
változó különböző értékeinek hatását illusztrálja az amplitúdó és fázisgörbe függvényekben.
Példa 3.3
Tömeg, rugó és csillapító Írjuk fel a tömegből, rugóból és csillapítóból álló mechanikai rendszer frekvencia függvényét. A frekvencia függvény:
| (231) |
Két pólusa van, amelyek a fizikai paraméterektől függően valósak, vagy komplexek lehetnek:  . Frekvencia diagramok valós pólusok esetén: Adatok:
. Frekvencia diagramok valós pólusok esetén: Adatok:  ,
,  ,
,  .
.
| (232) |
Valós pólusai vannak:  és
és  . Időállandók:
. Időállandók:  és
és  .
.
Frekvencia diagramok komplex pólusok esetén: A numerikus adatok:  ,
,  ,
,  .
.

| (233) |

Két komplex konjugált pólus van:  . Az időállandó és a csillapítási együttható:
. Az időállandó és a csillapítási együttható:  és
és  .
.
5. fejezet - Stabilitásvizsgálat
5.1. Rendszer stabilitása
Tekintsünk egy lineáris időinvariáns dinamikus rendszert, amelynek bemenőjele  ,
,  , kimenőjele pedig
, kimenőjele pedig  ,
,  . Adott a rendszer
. Adott a rendszer  súlyfüggvénye, illetve ennek
súlyfüggvénye, illetve ennek  -transzformáltja:
-transzformáltja:  . A bemenet/kimenet kapcsolatot zérus kezdeti feltétele mellett az alábbi konvolúciós integrál adja meg:
. A bemenet/kimenet kapcsolatot zérus kezdeti feltétele mellett az alábbi konvolúciós integrál adja meg:
| (234) |
Feltettük, hogy a rendszer a kezdeti időpontban nyugalmi állapotban van. Ezután feltehetjük a kérdést, hogy mi a feltétele annak, hogy ha  gerjesztés éri a rendszert, és az
gerjesztés éri a rendszert, és az  valamilyen tulajdonsággal rendelkezik, milyen feltételek esetén rendelkezik a kimenőjel is ugyanilyen tulajdonsággal.
valamilyen tulajdonsággal rendelkezik, milyen feltételek esetén rendelkezik a kimenőjel is ugyanilyen tulajdonsággal.
Tétel 4.1 Egy lineáris időinvariáns dinamikus rendszer stabilis akkor és csak akkor, ha
(a) A rendszer súlyfüggvénye abszolút integrálható,
| (235) |
(b) A rendszer  átviteli függvényének pólusai a baloldali komplex félsíkon helyezkednek el, azaz
átviteli függvényének pólusai a baloldali komplex félsíkon helyezkednek el, azaz
| (236) |

ahol  a
a  pólusa.
pólusa.
(c) A súlyfüggvény határértéke zérus, azaz
| (237) |

Példa 4.1
Az inverz inga egy  tömegű kocsira rögzített csapágyon szabadon elforgó rúd, amelynek
tömegű kocsira rögzített csapágyon szabadon elforgó rúd, amelynek  tömege a rúd felső végére van redukálva.
tömege a rúd felső végére van redukálva.
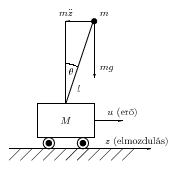
A feladat megoldása: A rúd  szögelfordulása a következőképpen függ az
szögelfordulása a következőképpen függ az  gerjesztő erőtől:
gerjesztő erőtől:
| (238) |
Az átviteli függvény pólusai:
| (239) |

A  pólus a jobboldali komplex félsíkra esik, tehát az inverz inga labilis.
pólus a jobboldali komplex félsíkra esik, tehát az inverz inga labilis.
Példa 4.2
A p paraméter milyen értékei esetén lesz stabil az alábbi állapottér reprezentáció:
| (240) |
| (241) |

A feladat megoldása:
| (242) |

| (243) |

Stabil, ha mindkét pólus negatív valós értékű.
| (244) |

| (245) |

ami mindig teljesül, azaz  bármely értékére
bármely értékére  negatív értékű.
negatív értékű.
1. eset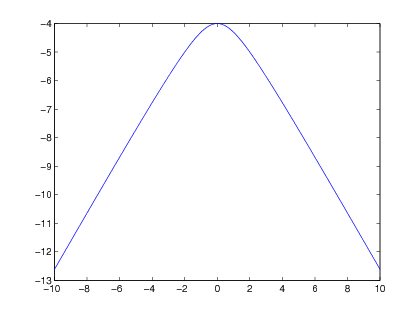 2. eset
2. eset
| (246) |

| (247) |

A negatív valós érték feltétele, hogy  legyen.
legyen.
5.1.1. Zárt rendszer stabilitása
A szabályozó tervezésénél mindig biztosítani kell, hogy akár stabilis, akár labilis a szabályozott folyamat, a zárt rendszer stabilis legyen. A zárt rendszer átviteli függvénye:
| (248) |
ahol  az előrevezető ág átviteli függvénye és
az előrevezető ág átviteli függvénye és  a hurokátviteli függvény.
a hurokátviteli függvény.
A zárt rendszer stabilis akkor és csak akkor, ha pólusai a baloldali komplex számsíkon helyezkednek el, tehát az
| (249) |

egyenlet  gyökereire teljesül a
gyökereire teljesül a  ,
,  feltétel, ahol
feltétel, ahol  a
a  pólusainak száma.
pólusainak száma.
A  a hurokátviteli függvény pólusai alapján vizsgálhatjuk a zárt rendszer stabilitását. Pólusok és a stabilitás kapcsolata:
a hurokátviteli függvény pólusai alapján vizsgálhatjuk a zárt rendszer stabilitását. Pólusok és a stabilitás kapcsolata:
- ha  , akkor a zárt rendszer stabilis,
, akkor a zárt rendszer stabilis,
- ha  , határeset,
, határeset,
- ha  , akkor a zárt rendszer labilis,
, akkor a zárt rendszer labilis,
ahol  a zárt rendszer pólusa.
a zárt rendszer pólusa.
A Nyquist szabályozási kritérium a  hurokátviteli frekvencia függvény alapján képes a zárt rendszer stabilitásáról képet adni.
hurokátviteli frekvencia függvény alapján képes a zárt rendszer stabilitásáról képet adni.
Rajzoljuk meg a frekvencia függvényt a  tartományra. A negatív frekvenciákra a függvény a pozitív frekvenciákra ismert függvénynek a valós tengelyre vett tükörképe lesz.
tartományra. A negatív frekvenciákra a függvény a pozitív frekvenciákra ismert függvénynek a valós tengelyre vett tükörképe lesz.
Tétel 4.2 (Nyquist kritérium) Ha a  (
( ) felnyitott hurok frekvencia függvénye a növekvő frekvenciák irányába haladva
) felnyitott hurok frekvencia függvénye a növekvő frekvenciák irányába haladva
- nem veszi körül a  pontot, akkor a rendszer stabilis,
pontot, akkor a rendszer stabilis,
- átmegy a  ponton, akkor a rendszer a stabilitás határán van,
ponton, akkor a rendszer a stabilitás határán van,
- körülveszi a  pontot, akkor a rendszer labilis.
pontot, akkor a rendszer labilis.
Ha a  frekvencia függvény a növekvő frekvenciák irányába haladva nem veszi körül a
frekvencia függvény a növekvő frekvenciák irányába haladva nem veszi körül a  pontot, akkor a zárt rendszer rendszer stabilis. Ha a
pontot, akkor a zárt rendszer rendszer stabilis. Ha a  frekvencia függvény épp átmegy a komplex számsík
frekvencia függvény épp átmegy a komplex számsík  pontján, akkor a
pontján, akkor a  frekvencia függvénynek
frekvencia függvénynek  körfrekvencián a zárt rendszerben csillapítatlan lengések keletkeznek. Ekkor a zárt rendszer a stabilitás határán van.
körfrekvencián a zárt rendszerben csillapítatlan lengések keletkeznek. Ekkor a zárt rendszer a stabilitás határán van.
5.1.2. Bode-stabilitási kritérium
A stabilitás analízist a Bode diagram alapján is elvégezhetjük, ezek az ún. Bode-stabilitási kritériumok.
- Ha -20 dB/dek-dal metszi a  tengelyt, akkor a zárt rendszer stabilis.
tengelyt, akkor a zárt rendszer stabilis.
- Ha -40 dB/dek-dal metszi a  tengelyt, akkor a vágási frekvencián érvényes fázisszög értéke dönt a zárt rendszer stabilitásáról. Ha
tengelyt, akkor a vágási frekvencián érvényes fázisszög értéke dönt a zárt rendszer stabilitásáról. Ha  , akkor a zárt rendszer stabilis, míg ha
, akkor a zárt rendszer stabilis, míg ha  , akkor a zárt rendszer labilis.
, akkor a zárt rendszer labilis.
- Ha -60 dB/dek-dal metszi a  tengelyt, akkor a zárt rendszer labilis.
tengelyt, akkor a zárt rendszer labilis.
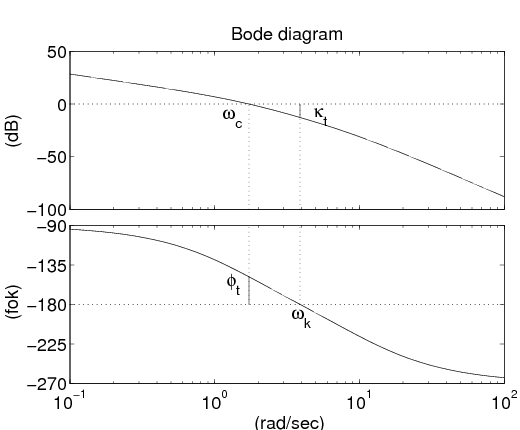
A zárt szabályozási körök stabilitásával kapcsolatban bevezetjük a  fázistartalék fogalmát:
fázistartalék fogalmát: 
- Ha  , akkor a zárt rendszer stabilis.
, akkor a zárt rendszer stabilis.
- Ha  , határeset.
, határeset.
- Ha  , akkor a zárt rendszer labilis.
, akkor a zárt rendszer labilis.
A zárt szabályozási körök stabilitásával kapcsolatban bevezetjük a  erősítési tartalék fogalmát. Azt mutatja, hogy mennyivel tudjuk még növelni a statikus körerősítést, úgy, hogy épp a stabilitás határára kerüljön a rendszer. Erősítési tartalék és a stabilitás kapcsolata:
erősítési tartalék fogalmát. Azt mutatja, hogy mennyivel tudjuk még növelni a statikus körerősítést, úgy, hogy épp a stabilitás határára kerüljön a rendszer. Erősítési tartalék és a stabilitás kapcsolata:
- Ha  , akkor a zárt rendszer stabilis.
, akkor a zárt rendszer stabilis.
- Ha  , határeset.
, határeset.
- Ha  , akkor a zárt rendszer labilis.
, akkor a zárt rendszer labilis.
6. fejezet - Minőségi tulajdonságok elemzése
6.1. Minőségi jellemzők
A minőségi kritériumok vizsgálata mindig a szabályozott rendszer (zárt kör) vizsgálatával történik: A zárt rendszer átviteli függvénye:
| (250) |

ahol  a hurokátviteli függvény és
a hurokátviteli függvény és  az előrevezető ág eredő átviteli függvénye. Az alábbiakban az időtartományi és frekvencia tartományi jellemzőket soroljuk fel.
az előrevezető ág eredő átviteli függvénye. Az alábbiakban az időtartományi és frekvencia tartományi jellemzőket soroljuk fel.
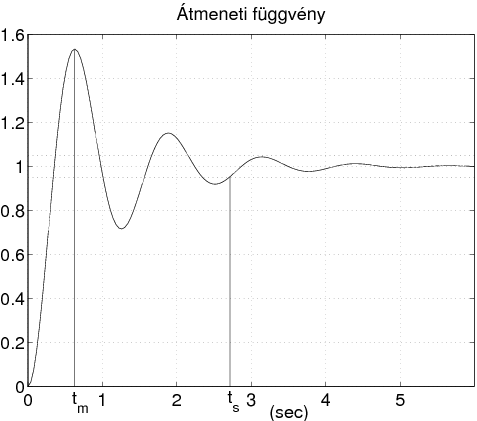
6.1.1. Időtartományi jellemzők
A rendszer állandósult állapotban felvett értékét beállási értéknek nevezzük, amit
 -sel jelölünk.
-sel jelölünk. A szabályozási idő (
 ) annak időtartama, amely eltelte után a rendszer kimenete a beállási értéktől
) annak időtartama, amely eltelte után a rendszer kimenete a beállási értéktől  -nál nagyobb mértékben nem tér el.
-nál nagyobb mértékben nem tér el. A szabályozási eltérés a megkívánt érték és az állandósult állapotbeli érték különbsége:
 ,
,túllendülési idő (
 ): a kimeneti jel maximális értékének időpontja,
): a kimeneti jel maximális értékének időpontja, túllendülés mértéke (
 ): százalékban kifejezett viszonyszám, ami a maximális és beállási érték közötti különbség beállási értékhez való viszonyát fejezi ki:
): százalékban kifejezett viszonyszám, ami a maximális és beállási érték közötti különbség beállási értékhez való viszonyát fejezi ki: 
6.1.2. Frekvencia tartományi jellemzők
rezonancia csúcs
 : az amplitúdó görbe maximális értéke,
: az amplitúdó görbe maximális értéke, rezonancia frekvencia
 : a rezonancia csúcshoz tartozó frekvencia érték,
: a rezonancia csúcshoz tartozó frekvencia érték,
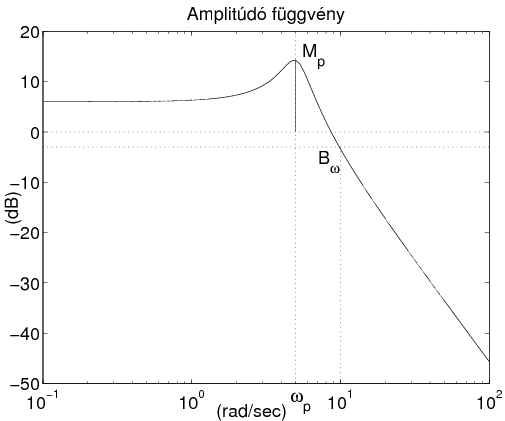
A sávszélesség fogalmát a kiegészítő érzékenységi függvény segítségével a következőképp adhatjuk meg. A rendszer sávszélessége az a
 frekvencia tartomány, amelyben a
frekvencia tartomány, amelyben a  kiegészítő érzékenységi függvény Bode diagramja
kiegészítő érzékenységi függvény Bode diagramja  -re csökken.
-re csökken.
6.2. Érzékenységfüggvény
Vizsgáljuk a zárt rendszer kimenetét különböző bemenetek esetén:
| (251) |

| (252) |

ahol  .
.
Bevezetjük a szabályozási körben értelmezett  érzékenységi függvényt és a
érzékenységi függvényt és a  kiegészítő érzékenységi függvényt:
kiegészítő érzékenységi függvényt:
| (253) |
| (254) |
Az érzékenységi függvény azt mutatja meg, hogy a zavaró jellemző hogyan befolyásolja a zárt rendszer kimenetét.
| (255) |
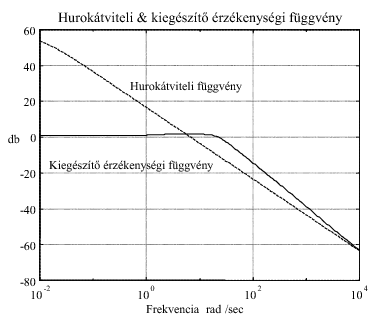
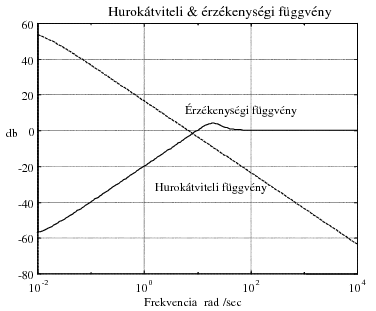
Az  érzékenységi függvény közelítő ábrázolását Bode-diagramon a felnyitott hurok
érzékenységi függvény közelítő ábrázolását Bode-diagramon a felnyitott hurok  frekvenciafüggvénye alapján a következőképp végezhetjük el.
frekvenciafüggvénye alapján a következőképp végezhetjük el.
Az érzékenységi függvény definíció szerint:
| (256) |
Kis és nagy körfrekvenciákra a következő közelítést használhatjuk:
| (257) |
A kiegészítő érzékenységi függvény a referencia jel és a kimenő jel közötti átviteli függvény.
| (258) |
A  kiegészítő érzékenységi függvény közelítő ábrázolását Bode-diagramon a felnyitott hurok
kiegészítő érzékenységi függvény közelítő ábrázolását Bode-diagramon a felnyitott hurok  frekvenciafüggvénye alapján a következőképp végezhetjük el. A kiegészítő érzékenység függvény definíció szerint:
frekvenciafüggvénye alapján a következőképp végezhetjük el. A kiegészítő érzékenység függvény definíció szerint:
| (259) |
Kis és nagy körfrekvenciákra a következő közelítést használhatjuk:
| (260) |
Az érzékenységi és kiegészítő érzékenységi függvények közötti összefüggés az alábbi:
| (261) |
6.3. Aszimptotikus jelkövetés
Követő szabályozásoknál a kimenőjelnek a referencia jeltől való eltérését követési hibának nevezzük:
| (262) |
Vizsgáljuk meg, hogy adott  referencia jelre aszimptotikusan mekkora lesz az eltérés, azaz a követési hiba. A követési hiba jel és a referencia jel Laplace-transzformáltjai közötti kapcsolatot az
referencia jelre aszimptotikusan mekkora lesz az eltérés, azaz a követési hiba. A követési hiba jel és a referencia jel Laplace-transzformáltjai közötti kapcsolatot az  érzékenységi függvény írja le. Alkalmazva a határérték tételeket:
érzékenységi függvény írja le. Alkalmazva a határérték tételeket:
| (263) |

Vizsgálhatjuk a tipikus referencia jelek, mint egységugrás vagy egység sebesség ugrás jelek aszimptikus követését.
6.3.1. 1. eset: Egységugrás bemenetre adott válaszfüggvény
Vizsgáljuk meg a válaszfüggvényt  ,
,  bemenetre. Ekkor
bemenetre. Ekkor
| (264) |

Ha  arányos jellegű, azaz ha
arányos jellegű, azaz ha  , akkor
, akkor
| (265) |
ahol  a hurokerősítési tényező. A követési hiba értéke függ a hurokerősítési tényező értékétől.
a hurokerősítési tényező. A követési hiba értéke függ a hurokerősítési tényező értékétől.
Ha  integráló jellegű, azaz ha
integráló jellegű, azaz ha  ,
,

alakú, akkor
| (266) |

tehát a követési hiba aszimptotikusan zérus.
Ha  2 típusú (kétszeres integrátort tartalmaz), azaz ha
2 típusú (kétszeres integrátort tartalmaz), azaz ha  ,
,  alakú, akkor
alakú, akkor
| (267) |

tehát a követési hiba aszimptotikusan zérus.
6.3.2. 2. eset: Egységsebesség bemenetre adott válaszfüggvény
Vizsgáljuk meg a válaszfüggvényt  ,
,  bemenetre. Ekkor
bemenetre. Ekkor
| (268) |

Ha  arányos jellegű, azaz ha
arányos jellegű, azaz ha  ,
,
akkor
| (269) |
azaz a kimenet nem korlátos.
Ha  integráló jellegű, azaz ha
integráló jellegű, azaz ha  ,
,

alakú, akkor
| (270) |

tehát a követési hiba aszimptotikusan nem zérus értékhez tart.
6.4. Zavarkompenzálás
Az aszimptotikus zavarkompenzálást az aszimptotikus alap- vagy referencia jelkövetéshez hasonlóan vizsgálhatjuk. Tipikus zavaró jelek, mint egységugrás, egység sebességugrás jelek, a zavaró jel hatását a kimenő jelben zérus referencia jel feltételezése mellett vizsgáljuk. Ehhez felírjuk a kimenő jel és a zavaró jel Laplace - transzformáltjai közötti összefüggéseket és alkalmazzuk a határérték tételeket.
A kimenő és a zavaró jel közötti átviteli függvény az  érzkenységi függvény. Ennek alapján a kimenőjel Laplace - transzformáltja
érzkenységi függvény. Ennek alapján a kimenőjel Laplace - transzformáltja
| (271) |

Alkalmazva a határérték tételt:
| (272) |
Legyen például  ,
,  .
.
6.4.1. 1. eset: Arányos rendszer vizsgálata
Vizsgáljuk meg az arányos rendszer viselkedését. A hurokátviteli függvény alakja  . Ekkor
. Ekkor
| (273) |
ahol  a hurokerősítés tényező. Tehát a zavaró jel hatása megjelenik a kimeneten.
a hurokerősítés tényező. Tehát a zavaró jel hatása megjelenik a kimeneten.
6.4.2. 2. eset: Integráló rendszer vizsgálata
Legyen például  ,
,  és tegyük fel, hogy a hurokátviteli függvény integráló alakú, azaz
és tegyük fel, hogy a hurokátviteli függvény integráló alakú, azaz  . Ekkor
. Ekkor
| (274) |
tehát a zavaró jel hatását a rendszer aszimptotikusan teljesen elnyomja, kompenzálja. Megjegyezzük, hogy a 2-típusú integráló tulajdonságú rendszer is kompenzálja a hibajelet.
7. fejezet - Bizonytalanságok modellezése
7.1. Bizonytalanságok modellezése
A dinamikus jelenségek leírására közönséges vagy parciális differenciál-egyenleteket használunk. Az egyenletek alakja és struktúrája, a bennük szereplő paraméterek általában nem ismertek teljesen pontosan vagy ha azok időben változnak, a változásuk általában nem ismert.
Mivel a valódi rendszer modelljének pontos alakja a gyakorlati feladatokban nem ismert, s emiatt helyette annak közelítő, úgynevezett névleges (nominális) modelljét használjuk. A modell és a valós rendszer közötti eltérést több tényező okozza:
Az eltérés oka egyrészt modellezési eljárás következménye (pl. a felharmonikusokat, illetve a magasabb fokszámú együtthatókat elhanyagoljuk),
másrészt a rendszer működése során bekövetkező változások (pl. a normál üzem során a modell paraméterei változnak, az anyag kifáradás során változnak a rendszer paraméterei, sőt akár a struktúrája).
A fizikai rendszerekre külső zavarás hat. Még ha tudjuk is a hatásmechanizmust, a zavarás maga, annak nagysága, előre nem ismert és nem a mi irányításunk alatt van.
Nem mindig tudjuk kiadni azt az irányítójelet, amit szeretnénk.
A mérések sem pontosak (mérési zaj hatása).
Ezen hatások modellezésekor célszerű megkülönböztetni az állandóan jelen levő modell bizonytalanságot a külső zavarástól. Zavarások (disturbances) körébe tartozik tipikusan a rendszerre ható külső zavarás, az irányítójel hibája, a mérési zaj. Az irányítás célja, hogy a zavarások hatását csökkentse a mérnöki szempontból érdekes (esetleg fiktív) kimenő jelekre -- ez egy tipikus performancia követelmény.
Modell bizonytalanság (uncertainty) a modellben meglevő parametrikus bizonytalanságok és a nem modellezett dinamika hatása. Egy speciális eset a qLPV modellek ütemezési változói, amik ismertek a végrehajtás során de nem ismertek tervezéskor: a tervezés számára bizonyos szempontból bizonytalan paraméterként viselkednek. Az irányítás célja stabilitás és performancia garantálása adott nagyságú feltételezett modell bizonytalanság mellett.
Kétféle modell-bizonytalanságot különböztethetünk meg: strukturális és strukturálatlan modell-bizonytalanságot. A struktúrált bizonytalanság modellezésekor a bizonytalansági blokk struktúrálása (például blokk-diagonális) növelheti a modell pontosságát és használhatóságát az irányítás-tervezés szempontjából. Tipikusan struktúrált a grey-box modellezés során kapott modellben előforduló paramétereknek a bizonytalansága: a paraméter értéke pontosan nem ismert, de a bizonytalanság mértéke általában jól becsülhető.
Példa 6.1
Egy gépjármű felfüggesztési modelljének megkonstruálásakor több tényezőt kell figyelembe venni.
a rugózott tömeg változik az utasok tömegének módosulásával,
a felfüggesztés rugó vagy csillapítás karakterisztikája módosul,
kerékabroncs dinamikája változik.
Példa 6.2
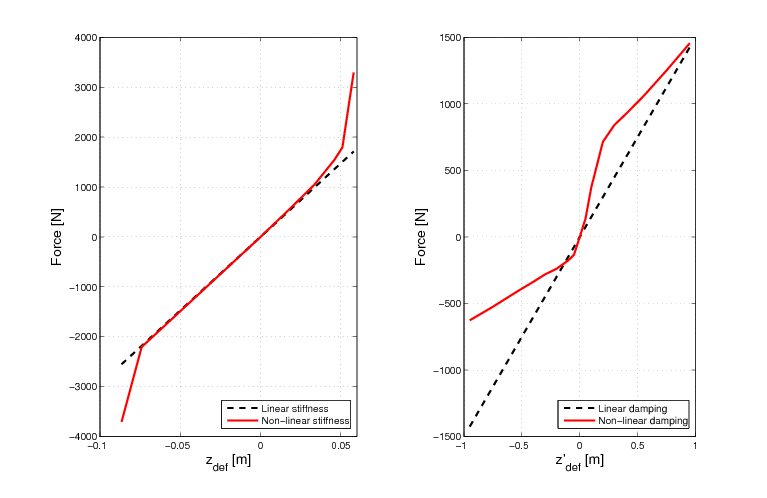
A modellezés során a nemlinearitások hatásait célszerű figyelembe venni. A mechanikai rendszerek irányítására alkalmazott lineáris irányítási algoritmusokkal megvalósított szabályozási rendszer tulajdonságait nagymértékben leronthatják a mechanikai rendszerben jelenlevő (nemfolytonos) nemlinearitások. Néhány jellemző példa: szaturáció, surlódás, holtsáv, kotyogás, hiszterézis.
7.2. Bizonytalansági modellek
7.2.1. Nemmodellezett dinamika
A mechanikai rendszerek irányítására alkalmazott lineáris vagy folytonos nemlineáris irányítási algoritmusokkal megvalósított szabályozási rendszer tulajdonságait nagymértékben leronthatják a mechanikai rendszerben jelenlevő (nemfolytonos) nemlinearitások. Tipikus nemlinearitások a szaturáció, surlódás,holtsáv, kotyogás, hiszterézis.
Számos irányítási alkalmazásnál az irányított rendszerben a nemlinearitás pontatlanul ismert vagy akár ismeretlen. Ha a linearizáláson alapuló technika kevésbé alkalmazható, a nemlinearitás hatásának kompenzálásához a szabályozót módosítani kell. Az alkalmazott technika alapján ez lehet robusztus szabályozás, amikor a szabályozót úgy tervezzük meg, hogy pontatlanul ismert nemlinearitás esetén is garantálja a zárt rendszer stabilitását és a szabályozási pontosságot, performanciát, vagy adaptív szabályozás, amikor a szabályozót kibővítjük olyan formában, hogy irányítás közben becsülje meg az ismeretlen nemlinearitást, paramétert.
A modell és a rendszer közötti hiba meghatározására általános megoldás nincs, különböző szerkezetű lehetőségek közül az additív, illetve a multiplikatív hiba struktúra a legismertebb.
A  aktuális rendszer és a
aktuális rendszer és a  névleges rendszer közötti eltérést additív hiba struktúrának nevezzük, ha a következő összefüggés teljesül:
névleges rendszer közötti eltérést additív hiba struktúrának nevezzük, ha a következő összefüggés teljesül:
| (275) |

ahol  az additív hiba átviteli függvénye. Az additív hiba ismeretlen.
az additív hiba átviteli függvénye. Az additív hiba ismeretlen.
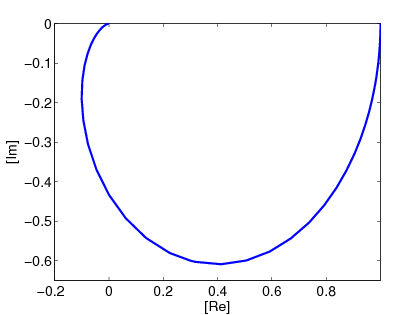
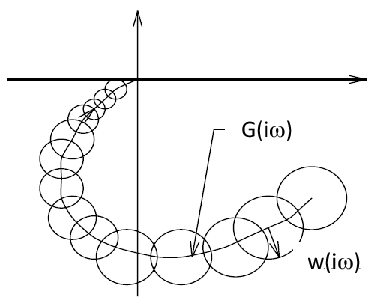
A  ismeretlen méretű additív hiba átviteli függvényt egy ismert korláttal rendelkező
ismeretlen méretű additív hiba átviteli függvényt egy ismert korláttal rendelkező  bizonytalansággal kifejezhetjük és frekvencia függvényét Nyquist diagramon ábrázolhatjuk:
bizonytalansággal kifejezhetjük és frekvencia függvényét Nyquist diagramon ábrázolhatjuk:
| (276) |

ahol  skalár függvény. Az aktuális
skalár függvény. Az aktuális  rendszer Nyquist diagramja a névleges
rendszer Nyquist diagramja a névleges  rendszer Nyquist diagramjával és a bizonytalanságot leíró
rendszer Nyquist diagramjával és a bizonytalanságot leíró  függvénnyel illusztrálható.
függvénnyel illusztrálható.
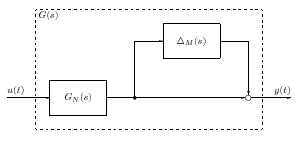
A  aktuális rendszer és a
aktuális rendszer és a  névleges rendszer közötti eltérést multiplikatív hiba struktúrájúnak nevezzük, ha a következő összefüggés teljesül:
névleges rendszer közötti eltérést multiplikatív hiba struktúrájúnak nevezzük, ha a következő összefüggés teljesül:

ahol  a multiplikatív hiba átviteli függvénye.
a multiplikatív hiba átviteli függvénye.
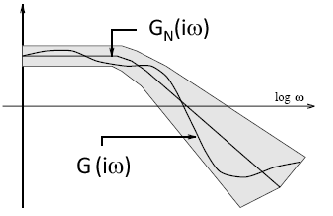
A  ismeretlen méretű additív hiba átviteli függvényt egy ismert korláttal rendelkező
ismeretlen méretű additív hiba átviteli függvényt egy ismert korláttal rendelkező  bizonytalansággal kifejezhetjük és frekvencia függvényét Bode diagramon ábrázolhatjuk:
bizonytalansággal kifejezhetjük és frekvencia függvényét Bode diagramon ábrázolhatjuk:
| (277) |

ahol  skalár függvény. Az aktuális
skalár függvény. Az aktuális  rendszer Bode diagramja a névleges
rendszer Bode diagramja a névleges  rendszer Bode diagramjával és a bizonytalanságot leíró
rendszer Bode diagramjával és a bizonytalanságot leíró  függvénnyel illusztrálható.
függvénnyel illusztrálható.
7.2.2. Parametrikus bizonytalanság
Gyakran a bizonytalanságok egy része a rendszert leíró modell paramétereinek változásával is megfogalmazható.
Például az  rendszermátrixban lévő
rendszermátrixban lévő  rugóállandó és
rugóállandó és  csillapítási együtthatók változnak. Ezek a paraméterek a mátrix több elemében is előfordulhatnak.
csillapítási együtthatók változnak. Ezek a paraméterek a mátrix több elemében is előfordulhatnak.
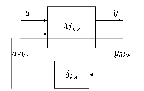
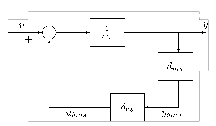
A bizonytalan rugóállandó paramétere a következőképpen modellezhető:
| (278) |
ahol  a névleges rugóállandó,
a névleges rugóállandó,  a névleges értéktől való eltérést mutatja, míg
a névleges értéktől való eltérést mutatja, míg  paraméterről azt tudjuk, hogy a
paraméterről azt tudjuk, hogy a  intervallumba esik. A bizonytalan rugóállandó
intervallumba esik. A bizonytalan rugóállandó  struktúrája a 33 ábrán látható.
struktúrája a 33 ábrán látható.

A jelek közötti kapcsolatok:
| (279) |
ahol  .Emiatt
.Emiatt  . Az ismert komponenseket tartalmazó blokk:
. Az ismert komponenseket tartalmazó blokk: 
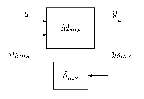
Ha egy bizonytalan paraméter a nevezőben van, akkor a következőképpen járunk el.
| (280) |
ahol  a névleges tömeg,
a névleges tömeg,  a névleges értéktől való eltérést mutatja, míg
a névleges értéktől való eltérést mutatja, míg  paraméterről azt tudjuk, hogy a
paraméterről azt tudjuk, hogy a  intervallumba esik. A bizonytalan rugóállandó
intervallumba esik. A bizonytalan rugóállandó  struktúrája a 34 ábrán látható.
struktúrája a 34 ábrán látható.
| (281) |

A jelek közötti kapcsolatok:
| (282) |
ahol  .Mivel
.Mivel  , ezért
, ezért  .
.
Emiatt  . Az ismert komponenseket tartalmazó blokk:
. Az ismert komponenseket tartalmazó blokk:  .
.
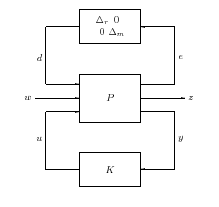
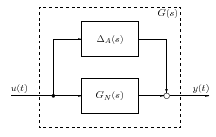
7.3. M- struktúra
struktúra
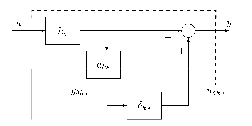
A szabályozott rendszer komponensei az előzőek alapján a modell és a szabályozó, valamint a minőségi specifikációkkal és bizonytalanságokkal kapcsolatos információk. A 35 ábrán látható úgynevezett  struktúrájú modellt használjuk a szabályozó tervezéséhez.
struktúrájú modellt használjuk a szabályozó tervezéséhez.
| (283) |
Ha figyelembe vesszük a szabályozó hatását, azaz az irányítójel és a mért jel közötti kapcsolatot  , akkor az úgynevezett M-
, akkor az úgynevezett M- struktúrához jutunk.
struktúrához jutunk.
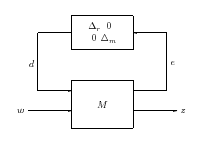
A 36. ábrán látható  modellt a szabályozott rendszer elemzéséhez használjuk.
modellt a szabályozott rendszer elemzéséhez használjuk.
| (284) |
8. fejezet - PID szabályozások tervezése
8.1. Tervezés frekvencia tartományban
Soros kompenzátor tervezése előírt fázistartalék elérése érdekében történik. A tervezési elv ismertetése érdekében első lépésben arányos soros kompenzátor tervezését mutatjuk be.
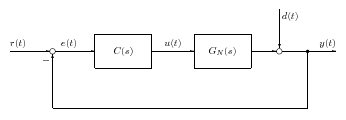
A zárt rendszer átviteli függvénye:
| (285) |

ahol  a hurokátviteli függvény és
a hurokátviteli függvény és  az előrevezető ág eredő átviteli függvénye.
az előrevezető ág eredő átviteli függvénye.
Vizsgáljuk meg első lépésben egy arányos kompenzátor tervezését. Kihasználjuk azt, hogy egy C=A arányos tag amplitúdója  , míg fázisa
, míg fázisa  a teljes frekvencia tartományban. Következtetés: Egy arányos tag az amplitúdó függvényt önmagával párhuzamosan eltolja, mégpedig
a teljes frekvencia tartományban. Következtetés: Egy arányos tag az amplitúdó függvényt önmagával párhuzamosan eltolja, mégpedig  esetén felfelé, míg
esetén felfelé, míg  esetén lefelé, ugyanakkor a fázisfüggvényt nem módosítja.
esetén lefelé, ugyanakkor a fázisfüggvényt nem módosítja.
A soros kompenzátort úgy kell megválasztani, hogy  vágási körfrekvenciához tartozó fázisszög éppen az előírt legyen.
vágási körfrekvenciához tartozó fázisszög éppen az előírt legyen.
Olvassuk le a fázisszöghöz tartozó amplitúdó értékét és jelöljük ezt előjelhelyesen  -szel Az arányos soros kompenzátort úgy kell megválasztani, hogy az amplitúdó függvényt önmagával párhuzamosan
-szel Az arányos soros kompenzátort úgy kell megválasztani, hogy az amplitúdó függvényt önmagával párhuzamosan  -szel eltolja (miközben a fázisfüggvényt változatlanul hagyja).
-szel eltolja (miközben a fázisfüggvényt változatlanul hagyja).
Tehát  -t a következőképpen kell megválasztani:
-t a következőképpen kell megválasztani:
| (286) |

ahol  az ábráról leolvasott érték, s ebből
az ábráról leolvasott érték, s ebből  kiszámítható:
kiszámítható:
| (287) |

Összefoglalva a soros kompenzátor tervezés lépései a következők:
(a)  választással felrajzoljuk a felnyitott hurok Bode diagramját.
választással felrajzoljuk a felnyitott hurok Bode diagramját.
(b) Leolvassuk a  -hez tartozó
-hez tartozó  előjeles értékét és kiszámítjuk
előjeles értékét és kiszámítjuk  soros kompenzátor értéket.
soros kompenzátor értéket.
Megjegyzés: Ha az amplitudó függvényt lefelé kell eltolni, akkor  , míg ha felfelé, akkor
, míg ha felfelé, akkor  erősítést várunk.
erősítést várunk.
(c) Megvizsgáljuk a zárt (szabályozott) rendszer minőségi tulajdonságait.
Ha a cél egy dinamikus kompenzátor tervezése, akkor a tervezést megpróbáljuk visszavezetni arányos soros kompenzátor tervezésére:
| (288) |
ahol  a kompenzátor átviteli függvényének ismert komponense.
a kompenzátor átviteli függvényének ismert komponense.
Például:
| (289) |
azaz  és
és  . A felnyitott hurok átviteli függvénye a következő:
. A felnyitott hurok átviteli függvénye a következő:
| (290) |

ahol  . Ha a rendszer átviteli függvényét a
. Ha a rendszer átviteli függvényét a  komponenssel módosítjuk, akkor
komponenssel módosítjuk, akkor  átviteli függvényhez jutunk.
átviteli függvényhez jutunk.
A tervezés során a  átviteli függvénnyel adott rendszert tekintjük szabályozandó rendszernek, amihez egy
átviteli függvénnyel adott rendszert tekintjük szabályozandó rendszernek, amihez egy  arányos kompenzátort kell terveznünk.Természetesen a tervezett soros kompenzátort
arányos kompenzátort kell terveznünk.Természetesen a tervezett soros kompenzátort  alakú.
alakú.
Példa 7.1
Legyen az irányítandó rendszer átviteli függvénye:
| (291) |
Tervezzünk  fokos fázistartalékot biztosító arányos soros kompenzátort.
fokos fázistartalékot biztosító arányos soros kompenzátort.
A feladat megoldása: Válasszunk kiindulásként  arányos soros kompenzátort:
arányos soros kompenzátort:
| (292) |
Szerkesszük meg a felnyitott hurok Bode diagramját.
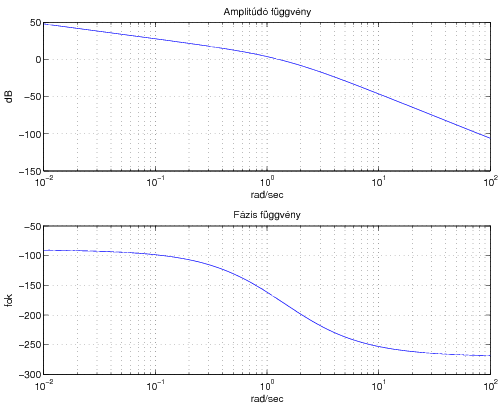
Változtassuk meg  -t úgy, hogy a fázistartalék
-t úgy, hogy a fázistartalék  fokos legyen, azaz
fokos legyen, azaz  és a fázisszög
és a fázisszög  -nél:
-nél:  . Kihasználjuk azt, hogy egy C=A arányos tag amplitúdója
. Kihasználjuk azt, hogy egy C=A arányos tag amplitúdója  , míg fázisa
, míg fázisa  a teljes frekvencia tartományban.
a teljes frekvencia tartományban.
• Jelen esetben  arányos soros kompenzátor oldja meg a feladatot (
arányos soros kompenzátor oldja meg a feladatot ( fokos fázistartalékot biztosít).
fokos fázistartalékot biztosít).
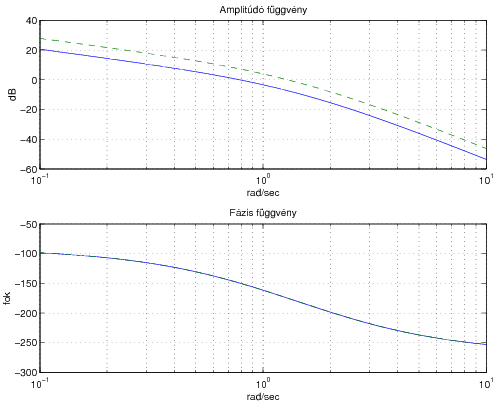
Példa 7.2
Legyen az irányítandó rendszer átviteli függvénye:
| (293) |
Tervezzünk jelkövetést biztosító soros kompenzátort, amelyik  fokos fázistartalékot is garantál.
fokos fázistartalékot is garantál.
A feladat megoldása: A jelkövetés akkor biztosítható, ha a soros kompenzátor integráló tulajdonságú. Emiatt a soros kompenzátort a következő alakban választjuk meg:
| (294) |

A felnyitott hurok átviteli függvénye a következő:
| (295) |
Ha a rendszer átviteli függvényét  -nek tekintjük, akkor a továbbiakban egy arányos soros kompenzátort kell terveznünk az
-nek tekintjük, akkor a továbbiakban egy arányos soros kompenzátort kell terveznünk az  . példában leírtakhoz hasonló módon.
. példában leírtakhoz hasonló módon.
A következőkben megvizsgáljuk, hogy a modell alapján megtervezett szabályozó vajon stabilizálja-e a valós rendszert. Ehhez a modell bizonytalansági struktúráiból indulunk ki.
Tekintsük a bizonytalanságot additív struktúrában.
| (296) |

A továbbiakban feltesszük, hogy a rendszer névleges modelljén kívül ismerjük a szabályozó modelljét. Tegyük fel, hogy a  kompenzált névleges rendszer stabilis. Vizsgáljuk meg, hogy a
kompenzált névleges rendszer stabilis. Vizsgáljuk meg, hogy a  aktuális rendszer stabilitásához milyen feltételnek kell teljesülnie.
aktuális rendszer stabilitásához milyen feltételnek kell teljesülnie.
Tétel 7.1 Legyen  az ismert névleges modell, amelyet a tervezett
az ismert névleges modell, amelyet a tervezett  soros kompenzátor stabilizál. Tegyük fel, hogy a névleges modell és az aktuális rendszer közötti additív hiba felső korlátját a teljes
soros kompenzátor stabilizál. Tegyük fel, hogy a névleges modell és az aktuális rendszer közötti additív hiba felső korlátját a teljes  frekvencia tartományban ismerjük. Ekkor a névleges modellre tervezett szabályozó az aktuális rendszer stabilitását is biztosítja, ha a következő feltétel teljesül:
frekvencia tartományban ismerjük. Ekkor a névleges modellre tervezett szabályozó az aktuális rendszer stabilitását is biztosítja, ha a következő feltétel teljesül:
| (297) |
Ez a robusztus stabilitás feltétele additív hiba struktúra esetén.
Tekintsük a bizonytalanságot multiplikatív struktúrában.
| (298) |

A továbbiakban feltesszük, hogy a rendszer névleges modelljén kívül ismerjük a szabályozó modelljét. Tegyük fel, hogy a  kompenzált névleges rendszer stabilis. Vizsgáljuk meg, hogy a
kompenzált névleges rendszer stabilis. Vizsgáljuk meg, hogy a  aktuális rendszer stabilitásához milyen feltételnek kell teljesülnie.
aktuális rendszer stabilitásához milyen feltételnek kell teljesülnie.
Tétel 7.2 Legyen  az ismert névleges modell, amelyet a tervezett
az ismert névleges modell, amelyet a tervezett  soros kompenzátor stabilizál. Tegyük fel, hogy a névleges modell és az aktuális rendszer közötti multiplikatív hiba felső korlátját a teljes
soros kompenzátor stabilizál. Tegyük fel, hogy a névleges modell és az aktuális rendszer közötti multiplikatív hiba felső korlátját a teljes  frekvencia tartományban ismerjük. Ekkor a névleges modellre tervezett szabályozó az aktuális rendszer stabilitását is biztosítja, ha a következő feltétel teljesül:
frekvencia tartományban ismerjük. Ekkor a névleges modellre tervezett szabályozó az aktuális rendszer stabilitását is biztosítja, ha a következő feltétel teljesül:
| (299) |
Ez a robusztus stabilitás feltétele multiplikatív hiba struktúra esetén.
8.2. PID struktúra
A PID egy arányos, egy integráló és egy differenciáló tag párhuzamos kapcsolata. A PID szabályozó tervezésekor az erősítéseket és az időállandókat kell megfelelően beállítani (hangolni). Megjegyezzük, hogy a valóságban időtárolós differenciáló tag van az ideális differenciáló tag helyett.
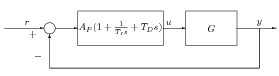
A szabályozó átviteli függvénye:
| (300) |
ahol  az arányos tag erősítése,
az arányos tag erősítése,  az integráló tag időállandója,
az integráló tag időállandója,  a differenciáló tag időállandója.
a differenciáló tag időállandója.
Az  jel és
jel és  hibajel közötti kapcsolat:
hibajel közötti kapcsolat:
| (301) |

Zérus kezdeti feltételekkel Laplace transzformálva:
| (302) |
Példaként tekintsük a  átviteli függvényű rendszert, amit különböző arányos taggal szabályoztunk.
átviteli függvényű rendszert, amit különböző arányos taggal szabályoztunk.
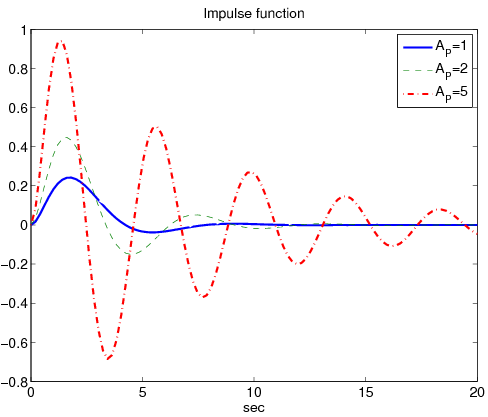
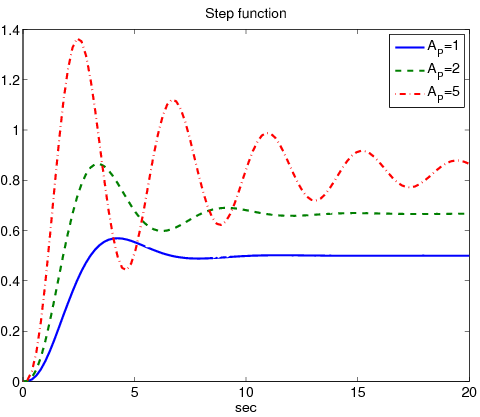
Növekvő erősítések mellett a szabályozási eltérés csökken ugyan, de a válaszfüggvény oszcillációja jelentősen növekszik. Tekintsük ugyanazt a  átviteli függvényű rendszert. Ezúttal PI taggal végeztük a szabályozást. Rögzítsük az arányos tagot
átviteli függvényű rendszert. Ezúttal PI taggal végeztük a szabályozást. Rögzítsük az arányos tagot  -re és változtassuk az integráló tag
-re és változtassuk az integráló tag  időállandóját.
időállandóját. .
.
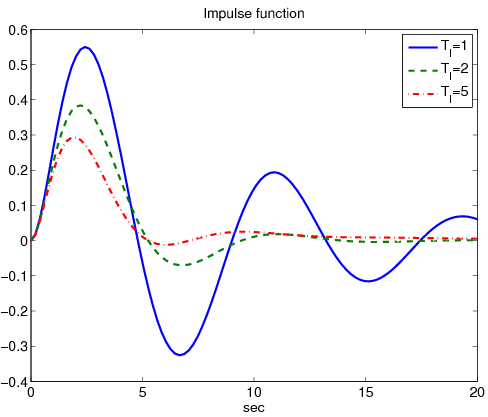
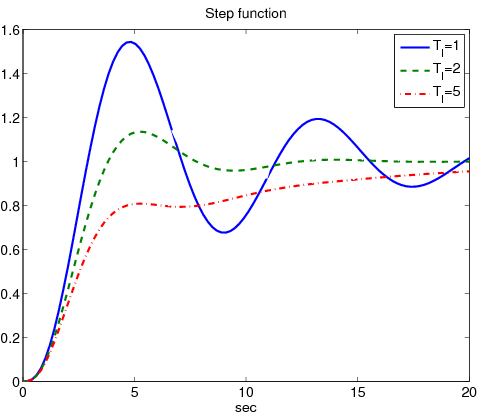
Az integráló hatás eredményeként az állandósult állapotú hiba eltűnik. A válaszfüggvény oszcillációja  növekedésével jelentősen csökkenthető, viszont ezzel együtt a beállási idő jelentősen növekszik.Tekintsük ugyanazt a
növekedésével jelentősen csökkenthető, viszont ezzel együtt a beállási idő jelentősen növekszik.Tekintsük ugyanazt a  átviteli függvényű rendszert. Ezúttal PID taggal végeztük a szabályozást. Rögzítsük az arányos tagot
átviteli függvényű rendszert. Ezúttal PID taggal végeztük a szabályozást. Rögzítsük az arányos tagot  -ra, rögzítsük az integráló tag
-ra, rögzítsük az integráló tag  időállandóját
időállandóját  -re és változtassuk a differenciáló tag
-re és változtassuk a differenciáló tag  időállandóját.
időállandóját. .
.
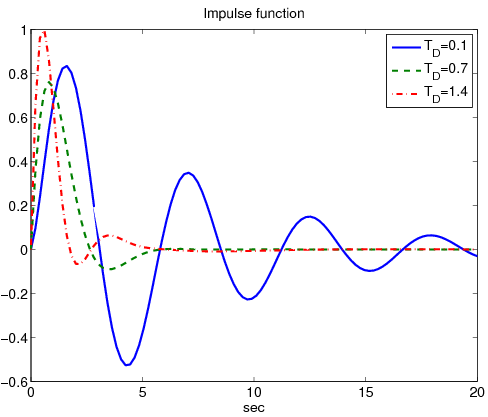
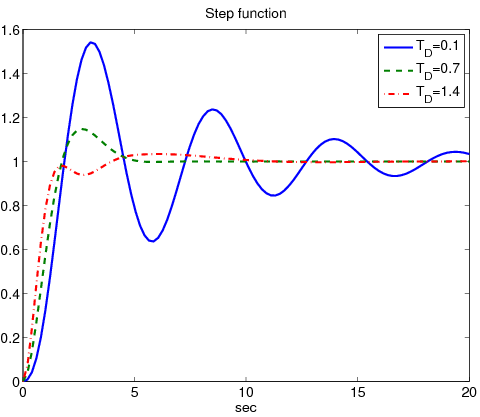
A  növekedésével a beállási idő jelentősen csökkenthető és a lengések jelentősen csillapíthatók. A differenciáló hatás a szabályozást gyorsítja.
növekedésével a beállási idő jelentősen csökkenthető és a lengések jelentősen csillapíthatók. A differenciáló hatás a szabályozást gyorsítja.
A PID szabályozó egy arányos, egy integráló és egy differenciáló tag párhuzamos kapcsolataként értelmezhető.
| (303) |
A PID szabályozó egy másik alakja egy arányos, egy PI tag és egy PD tag soros kapcsolataként értelmezhető. Ekkor az egyes komponensek egymással kölcsönhatásban vannak.
| (304) |
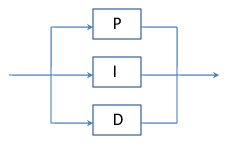

A kétféle felírás között a következő kapcsolat írható fel. A klasszikus alak komponensei:
| (305) |
| (306) |

| (307) |

A soros alak komponensei:
| (308) |
| (309) |
| (310) |
Megjegyzés: A soros alak felírásának feltétele, hogy  . A klasszikus alak általánosabb, mint a soros alak. Gyakran a tervezés (tuningolás) szempontjából a soros alak ledvezőbb. A két felírás P, PI, PD típusú struktúrák esetén ekvivalens. Különböző PID struktúrák választása esetén a két felírás paraméterei különböznek, azokat az összefüggéseknek megfelelően kell számítani.
. A klasszikus alak általánosabb, mint a soros alak. Gyakran a tervezés (tuningolás) szempontjából a soros alak ledvezőbb. A két felírás P, PI, PD típusú struktúrák esetén ekvivalens. Különböző PID struktúrák választása esetén a két felírás paraméterei különböznek, azokat az összefüggéseknek megfelelően kell számítani.
A PID struktúra egy másik elterjedten használt alakja:
| (311) |
Ez az alak a klasszikus  PID alakkal ekvivalens.
PID alakkal ekvivalens.
A két alak közötti kapcsolat:
| (312) |

| (313) |

| (314) |

és az időállandók:  ,
,  .
.
A PID szabályozók tervezésekor a következő négy szempontot kell figyelembe venni:
- Zajszűrés.
- Referenciajel súlyozás.
- Beavatkozó telítődése.
- Tuningolás, hangolás.
8.3. PID tervezési módszer
8.3.1. Zajszűrés
A deriválási művelet mindig érzékeny a zajra.
Tekintsük az alábbi példát: Tegyük fel, hogy a jel a következő alakú:
| (315) |
ahol a zaj  alakú,
alakú,  frekvenciájú szinusz jel. A deriválást elvégezve:
frekvenciájú szinusz jel. A deriválást elvégezve:
| (316) |
ahol  . Az eredmény azt mutatja, hogy habár az
. Az eredmény azt mutatja, hogy habár az  zaj hatása az
zaj hatása az  eredeti jelre
eredeti jelre  , de a derivált alakban ez az arány
, de a derivált alakban ez az arány  . A zaj aránya tetszőlegesen nagy lehet, ha
. A zaj aránya tetszőlegesen nagy lehet, ha  nagy értékű. Deriválási művelet esetén a magas frekvenciás komponens hatását csökkenteni kell. Ennek érdekében az
nagy értékű. Deriválási művelet esetén a magas frekvenciás komponens hatását csökkenteni kell. Ennek érdekében az  ideális PD tag helyett egy egytárolós komponenssel módosított tagot alkalmazunk:
ideális PD tag helyett egy egytárolós komponenssel módosított tagot alkalmazunk:
| (317) |

A komponens erősítése a nagyfrekvencia tartományban  értékre van korlátozva. Következésképpen megakadályozzuk, hogy az
értékre van korlátozva. Következésképpen megakadályozzuk, hogy az  zaj
zaj  jelre való hatása túl nagy értékre növekedjen.
jelre való hatása túl nagy értékre növekedjen.
A PID szabályozó általános alakja a következőképpen módosul:
| (318) |
Nagyfrekvenciás tartományban az erősítés értéke:
| (319) |

növelésével a sávszélesség növekszik, ami stabilitási szempontból kedvezőtlen. Emiatt további elsőrendű szűrőket alkalmazunk:
| (320) |
ahol  a filter állandója, ami kölcsönhatásban van a szabályozó időállandóival.
a filter állandója, ami kölcsönhatásban van a szabályozó időállandóival.  célszerű megválasztása
célszerű megválasztása  .
.
Egy példa a szűrő lehetséges megválasztására:
| (321) |
8.3.2. Referenciajel súlyozás
Gyorsan változó alapjel (egységugrás) esetén a szabályozó jelen impulzusszerű gyors válaszok jelenhetnek meg. Ezt a nemkívánatos jelenséget a referenciajel szűrésével oldhatjuk meg. Egy másik megoldási lehetőség a referenciajel megfelelő erősítésével történhet, amit referenciajel súlyozási eljárásnak nevezzük. A klasszikus PID esetén az  jel:
jel:
| (322) |

A módosított PID szabályozó esetén az  jel:
jel:
| (323) |

Az integrátort közvetlenül a hibajelre alkalmazzuk, viszont az arányos komponenst és a deriválás komponensét a súlyozott referenciajel és a kimenőjel különbségére alkalmazzuk. A bemenőjel összefüggése:
| (324) |

| (325) |

Az összefüggés azt mutatja, hogy a szabályozó struktúra elvileg két-szabadságfokú, melyeket egyrészt a referenciajelre, másrészt a kimenőjelre kell alkalmazni:  , ahol
, ahol
| (326) |

| (327) |

A referenciajel értékét egyrészt  erősítéssel, másrészt
erősítéssel, másrészt  erősítéssel módosítjuk.
erősítéssel módosítjuk.
| (328) |

| (329) |

Megfelelő megválasztásukkal (hangolásukkal) a nagy tranziensek és túllendülések elkerülhetők.
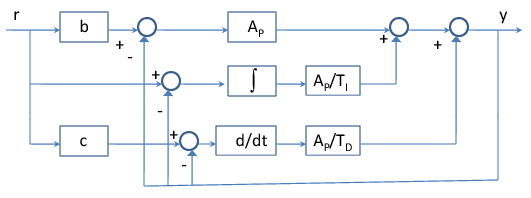
Példa 7.3
Példaként tekintsük a  átviteli függvényű rendszert, amit PID kompenzátorral szabályoztunk:
átviteli függvényű rendszert, amit PID kompenzátorral szabályoztunk:  . A példában a súlyokat rendre
. A példában a súlyokat rendre  és
és  értékekre választottuk. Az ábra a
értékekre választottuk. Az ábra a  erősítés hatását mutatja.
erősítés hatását mutatja.
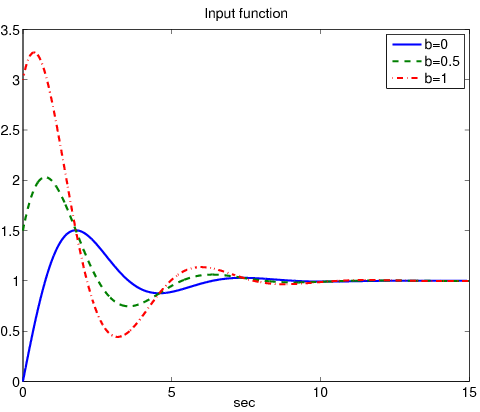
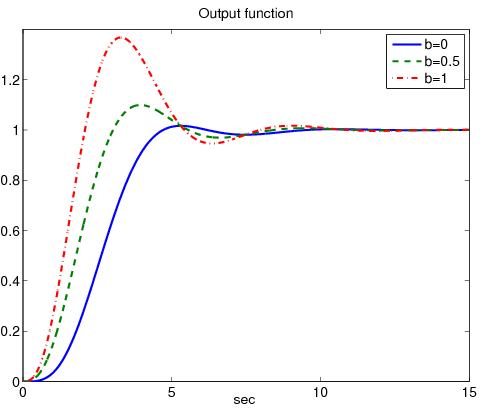
A legkisebb túllendülést  esetén értük el, ami azt jelenti, hogy a referenciajelet az arányos komponensbe nem vittük be. Növekvő
esetén értük el, ami azt jelenti, hogy a referenciajelet az arányos komponensbe nem vittük be. Növekvő  mellett a túllendülés növekszik.
mellett a túllendülés növekszik.
8.3.3. Beavatkozó telítődése
Minden beavatkozó elemnek vannak korlátai. Ha a beavatkozó működése során telítésbe megy, akkor a rendszer nyílt hurokként működik, hiszen a beavatkozó nem tud nagyobb értéket generálni, bármit is kíván a szabályozó. Ha a szabályozó integrátort tartalmaz és az aktuátor telítésbe megy, akkor a rendszer kimenetén egyre nagyobb érték jelenik meg, azaz nagy tranziensek keletkeznek. Több módszer van a windup elkerülésére.
- Referenciajel korlátozás: Annak érdekében, hogy elkerüljük az integrátor által okozott növekvő tranziensű jeleket, a referenciajel értékét korlátozzuk. Ez a megoldás konzervatív eredményhez és gyenge minőségi tulajdonságokhoz vezet.
- Sebesség algoritmus: Az algoritmus kiszámítja az irányítójel változásának (sebességének) értékét. Abban az esetben, ha az aktuátor telítésbe ment, az integrátorra adott jelet korlátozzuk, s ezzel megakadályozzuk a tranziensek növekedését. Tulajdonképpen az irányítójel változásának értékét korlátozzuk.
- Beavatkozójel számítása: Ha az aktuátor telítésbe megy, akkor az integrál jel értékét kiszámítjuk és módosítjuk annak érdekében, hogy a kimenetének korlátozását figyelembe vegyük.
Az ábrán látható szabályozó egy további visszacsatolást tartalmaz, ami a beavatkozóra kiadott jel és a számított jel közötti különbségét alkalmazza. A két jel között egy sebességjel korlátozás van.
- Ha a nincs telítés, akkor a hibajel zérus és a visszacsatolásnak nincs hatása. Ha a jel telítésbe megy, akkor a nem zérus hibajelet a visszacsatoláson keresztül a szabályozó figyelembe veszi.
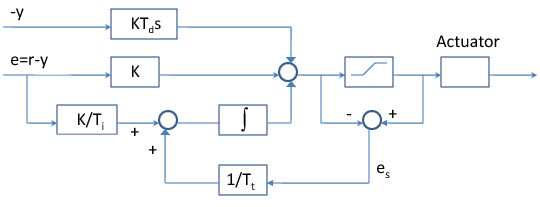
Az integrátor bemenete:  ahol
ahol  a követési hiba,
a követési hiba,  a szaturációs blokk bemenete és kimenete közötti eltérés.
a szaturációs blokk bemenete és kimenete közötti eltérés.
Az integrátor bemenete:
| (330) |

ahol  a követési hiba. Állandósult állapotban az integrátor bemenetén zérus van, ezért az állandósult állapotú jel értéke
a követési hiba. Állandósult állapotban az integrátor bemenetén zérus van, ezért az állandósult állapotú jel értéke  . Mivel
. Mivel
| (331) |

az irányítójel értéke:
| (332) |
ahol  az irányítójel telítési értéke. Ez azt jelenti, hogy a
az irányítójel telítési értéke. Ez azt jelenti, hogy a  jel a telítési értékre beáll és azt csak rövid ideig haladja meg. A visszacsatolásban alkalmazott
jel a telítési értékre beáll és azt csak rövid ideig haladja meg. A visszacsatolásban alkalmazott  időállandó megválasztása az integrátorra való hatás dinamikáját szabja meg.
időállandó megválasztása az integrátorra való hatás dinamikáját szabja meg.
8.3.4. Tuningolás, hangolás
A szabályozó hangolásának egyik legegyszerűbb módszere a felnyitott hurok átmeneti függvénye alapján dolgozik. PI és PID szabályozóra a hurokerősítés az I hatás kiiktatásával történik.  az úgynevezett lappangási idő (holtidő és késleltetés), míg
az úgynevezett lappangási idő (holtidő és késleltetés), míg  a felfutási idő.
a felfutási idő.
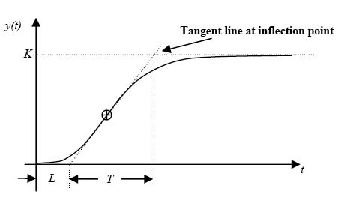
Az ábráról leolvasott értékek alapján a hurokerősítés, az integrálási időállandó és a deriválási időállandó beállítható.
|
|
| |
P |
|
|
|
PI |
|
|
|
PD |
|
|
|
PID |
|
|
|















- PI szabályozásban a hurokerősítést a P szabályozáshoz képest célszerű lecsökkenteni. Ennek az oka, hogy a PI kompenzáció a  meredekségű szakaszt a kisfrekvenciák irányába tolja el az amplitudó görbét. A stabilitási tartalék növeléséhez emiatt a hurokerősítést célszerű kissé lecsökkenteni.
meredekségű szakaszt a kisfrekvenciák irányába tolja el az amplitudó görbét. A stabilitási tartalék növeléséhez emiatt a hurokerősítést célszerű kissé lecsökkenteni.
- PD és PID szabályozások esetén a hurokerősítés valamelyest növelhető a P szabályozáshoz képest. Ennek oka, hogy a PD és PID kompenzáció esetén a  meredekségű szakasz a nagyobb frekvenciák tartományában is folytatódik. A stabilitási tartalék még megfelelő marad, ha a hurokerősítést kissé növeljük.
meredekségű szakasz a nagyobb frekvenciák tartományában is folytatódik. A stabilitási tartalék még megfelelő marad, ha a hurokerősítést kissé növeljük.
A szabályozó hangolásának Ziegler-Nichols módszere a szabályozási kör belengetése alapján dolgozik. A módszer lényege, hogy a szabályozást a hurokerősítés növelésével az állandósult lengés állapotába hozzuk. A stabilitás határhelyzetében megmérjük a lengések  periódusidejét és a beállított
periódusidejét és a beállított  kritikus hurokerősítést. A meghatározott értékek alapján a hurokerősítés, az integrálási időállandó és a deriválási időállandó beállítható.
kritikus hurokerősítést. A meghatározott értékek alapján a hurokerősítés, az integrálási időállandó és a deriválási időállandó beállítható.
|
|
| |
P |
|
|
|
PI |
|
|
|
PID |
|
|
|












9. fejezet - Irányítástervezés állapot-visszacsatolással
9.1. Pólusallokációs módszer
Adott egy rendszer  -dimenziós
-dimenziós  állapottér reprezentációja:
állapottér reprezentációja:

| (333) |

A rendszer karakterisztikus polinomja:
| (334) |

Módosítsuk a rendszer dinamikáját az  állapot visszacsatolásával, azaz legyen a bemenőjel
állapot visszacsatolásával, azaz legyen a bemenőjel
| (335) |

ahol  egy külső alap-, vagy referencia jel a
egy külső alap-, vagy referencia jel a  pedig az állapot visszacsatolás erősítési tényezője:
pedig az állapot visszacsatolás erősítési tényezője:
| (336) |

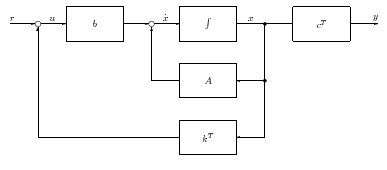
Behelyettesítve a bemenőjel alakját az állapotegyenletbe, a zárt rendszer állapotegyenlete a következő lesz:
| (337) |
| (338) |

amiből a zárt rendszer karakterisztikus egyenletére azt kapjuk, hogy
| (339) |

Az alábbiakban megmutatjuk, hogy a  erősítés megfelelő megválasztásával a zárt rendszer karakterisztikus polinomja tetszőlegesen beállítható, ha az
erősítés megfelelő megválasztásával a zárt rendszer karakterisztikus polinomja tetszőlegesen beállítható, ha az  rendszer irányítható.
rendszer irányítható.
Mivel minden irányítható állapottér reprezentáció irányítható alakra hozható, tegyük fel hogy az alábbi rendszert irányítható alakra hoztuk.

| (340) |

Ekkor a visszacsatolással módosult állapotmátrix:

| (341) |
A zárt rendszer karakterisztikus polinomja:

| (342) |

Ha a zárt rendszer pólusait előírjuk, akkor rögzítjük a  pólusokat, amiből az
pólusokat, amiből az  karakterisztikus polinom számítható:
karakterisztikus polinom számítható:

| (343) |

Ebben a kifejezésben  -k az állapot visszacsatolással módosított karakterisztikus polinom együtthatói. A
-k az állapot visszacsatolással módosított karakterisztikus polinom együtthatói. A  ,
,  és
és  együtthatók közötti kapcsolat:
együtthatók közötti kapcsolat:
| (344) |

A kompenzátor elemeinek számítása:
| (345) |

ahol  -k az eredeti, míg
-k az eredeti, míg  -k a módosított karakterisztikus polinom együtthatói.
-k a módosított karakterisztikus polinom együtthatói.
A tervezés során tehát előbb meghatározzuk az eredeti rendszer, majd a tervezett rendszer karakterisztikus polinomját. Az eredeti rendszer karakterisztikus polinomja:
| (346) |

A tervezett zárt rendszer karakterisztikus polinomja:
| (347) |

Az együtthatók közötti összefüggések:
| (348) |

Az állapot visszacsatolás értékei:
| (349) |

Ha a rendszer irányítható, de nem irányíthatósági alakban adott, akkor egy  nem szinguláris transzformációs mátrix segítségével irányíthatósági alakra hozható. Az irányíthatósági alakban jelöljük
nem szinguláris transzformációs mátrix segítségével irányíthatósági alakra hozható. Az irányíthatósági alakban jelöljük  és
és  -vel az állapotegyenlet együtthatóit.A tervezés ebben az irányíthatósági alakban történik, ami azt jelenti, hogy a tervezés eredményeként egy olyan
-vel az állapotegyenlet együtthatóit.A tervezés ebben az irányíthatósági alakban történik, ami azt jelenti, hogy a tervezés eredményeként egy olyan  állapot-visszacsatolást tervezünk, amely az irányíthatósági állapottér reprezentációra működik.
állapot-visszacsatolást tervezünk, amely az irányíthatósági állapottér reprezentációra működik.
A tervezett állapot visszacsatolt erősítőt vissza kell transzformálni az eredeti rendszer állapotterére. A transzformálás összefüggése az alábbi:
| (350) |

A tervezési lépések a következők:
(a) Az irányíthatóság ellenőrzése. Ha a rendszer nem irányítható, akkor az állapot visszacsatolás módszere nem alkalmazható.
(b) A rendszert irányíthatósági alakra hozzuk, azaz meghatározzuk  nem szinguláris mátrixot, amely a rendszert irányíthatósági alakúra hozza.
nem szinguláris mátrixot, amely a rendszert irányíthatósági alakúra hozza.
| (351) |

Ha a rendszer eleve irányíthatósági alakban adott, akkor  mátrixot egységmátrixnak választjuk, azaz
mátrixot egységmátrixnak választjuk, azaz  .
.
Megjegyezzük, hogy az új állapottérbe való transzformálás tényleges elvégzésére nincs szükség, elegendő a transzformációs mátrix meghatározása.
(c) Meghatározzuk az eredeti rendszer karakterisztikus polinomját:
| (352) |

Ezután meghatározzuk a tervezett rendszer karakterisztikus polinomját:
| (353) |

Ezekhez a műveletekhez az eredeti rendszer  mátrixát és a szabályozott rendszertől megkövetelt új pólusokat kell felhasználni.
mátrixát és a szabályozott rendszertől megkövetelt új pólusokat kell felhasználni.
(d) A kompenzátor komponenseit kiszámítjuk:
| (354) |

ahol  ,...,
,...,  ,
,
(e) Meghatározzuk az eredeti rendszerre vonatkozó erősítés együtthatóit.
| (355) |

Az irányítójel az alábbi:
| (356) |

Megjegyzés 8.1 A fenti lépéseket egyetlen összefüggésbe sűríthetjük:
| (357) |

ahol a  az irányíthatósági alak előállítására szolgáló transzformációs mátrix. Az állapotvisszacsatolt erősítő:
az irányíthatósági alak előállítására szolgáló transzformációs mátrix. Az állapotvisszacsatolt erősítő:
| (358) |

Az összefüggést az állapotvisszacsatolás erősítésének meghatározására szolgáló Bass Gura formulának nevezzük.
Összefoglalás:
(a) A pólusallokációs módszer alkalmazásának feltétele:
* Az állapotvektor elemei mértek legyenek.
* Az állapottér reprezentáció teljesítse az irányíthatósági feltételt.
* A szabályozott rendszer pólusai adottak legyenek.
(b) A pólusallokációs módszer előnyei:
* A módszer végrehajtása egyszerű mátrix műveletekkel történik.
* A szabályozott rendszer stabilis.
(c) A pólusallokációs módszer hátrányai:
* Az irányítójel tetszőlegesen nagy lehet.
* A pólusok elhelyezkedése és a minőségi tulajdonságok közötti kapcsolat bonyolult, heurisztikus szabályokra és mérnöki intuíciókra hagyatkozva kell a pólusok helyét előírni.
* A szabályozott rendszer minőségi tulajdonságai az állapot-visszacsatolt erősítő megtervezése után utólagosan vizsgálandók.
Példa 8.1
Adott a
| (359) |
átviteli függvénnyel jellemzett rendszer. Írja fel a rendszer állapottér reprezentációját diagonális alakban! Tervezzen az így felírt állapottér reprezentációhoz állapot-visszacsatolást a  ,
,  pólusokkal!
pólusokkal!
A feladat megoldása:
Diagonális alak előállítása:
| (360) |
| (361) |
| (362) |
Vezessük be új változóként az  ,
,  változókat, ahol
változókat, ahol
| (363) |
| (364) |
| (365) |

Az állapottér reprezentáció diagonális alakban:
| (366) |
| (367) |

Az eredeti rendszer karakterisztikus polinomja:
| (368) |

Szabályozott rendszer karakterisztikus polinomja:
| (369) |

Állapotvisszacsatolás erősítései: 
| (370) |
Ha a rendszer irányítható, de nem irányíthatósági alakban adott, akkor egy  nem szinguláris transzformációs mátrix segítségével irányíthatósági alakra hozható.
nem szinguláris transzformációs mátrix segítségével irányíthatósági alakra hozható.

ahol  a transzformációs mátrix. Az állapotvisszacsatolt-erősitő összefüggése: a hasonlósági transzformáció alapján az alábbi:
a transzformációs mátrix. Az állapotvisszacsatolt-erősitő összefüggése: a hasonlósági transzformáció alapján az alábbi:
| (371) |

Transzformációs mátrix:
| (372) |
ahol
| (373) |
| (374) |

Transzformációs mátrix:
| (375) |
Az eredeti állapottérbe transzformálva:
| (376) |

| (377) |

10. fejezet - Lineáris kvadratikus szabályozótervezés
Az irányítástervezés során gyakran szeretnénk egy irányítás paramétereit úgy megválasztani, hogy valamilyen előre meghatározott minőségi tulajdonság (performancia előírás) teljesüljön. Az optimalizálási feladatokban olyan paraméterek választása a cél ami maximalizál vagy minimalizál egy adott kritérium-függvényt. Ebben a fejezetben megmutatjuk, hogyan lehet megválasztani azokat a paramétereket amik optimalizálnak egy adott kvadratikus specifikációt és amelyek a lehető legkisebb költséggel maximalizálják a megkívánt performanciát.
Tekintsük az alábbi kritérium-függvényt
| (378) |
a következő dinamikus feltételek mellett
| (379) |

ahol az  kezdeti feltétel adott és
kezdeti feltétel adott és  . Ez egy korlátozások melletti optimalizálási feladat, ahol egy olyan megengedett
. Ez egy korlátozások melletti optimalizálási feladat, ahol egy olyan megengedett  trajektóriát keresünk ami minimalizálja a perem pontokban korlátozott
trajektóriát keresünk ami minimalizálja a perem pontokban korlátozott  költségfüggvényt
költségfüggvényt
| (380) |

Az  tag az integrál költség míg
tag az integrál költség míg  a végső, terminális költség. A
a végső, terminális költség. A  függvény a terminális korlátozások egy halmazát határozza meg. A korlátozások menlleti optimalizálási feladatoknál szokásos módon egy
függvény a terminális korlátozások egy halmazát határozza meg. A korlátozások menlleti optimalizálási feladatoknál szokásos módon egy
| (381) |
Hamilton függvényt definiálunk, ahol bevezetjük az időfüggő  társváltozókat.
társváltozókat.
Tétel 9.1 (Maximum elv) Ha  optimális akkor létezik
optimális akkor létezik  és
és  úgy, hogy
úgy, hogy
| (382) |
adott  ,
,  peremfeltételekkel, ahol
peremfeltételekkel, ahol  és
és
| (383) |

minden  esetén.
esetén.
A maximum elv nemlineáris dinamikák esetén is alkalmazható valamint abban az esetben is ha a szabályozó bemenet egy  halmaz által van korlátozva. Korlátozások néklül,
halmaz által van korlátozva. Korlátozások néklül,  , és differenciálható
, és differenciálható  esetén az optimalitás egy szükséges feltétele, hogy
esetén az optimalitás egy szükséges feltétele, hogy
| (384) |

Ha  létezik, akkor felhasználható mint optimális szabályozó jel.
létezik, akkor felhasználható mint optimális szabályozó jel.
A bizonyítás elve a következő: a Lagrange féle multiplikátorok módszerét alkalmazva a költségfüggvény alakja

| (385) |

ami a Hamilton függvény felhasználásával
| (386) |

alakba írható. Az optimális megoldás környezetében linearizálva, azaz  ,
,  ,
, és
és  esetén, kapjuk, hogy
esetén, kapjuk, hogy


| (387) |

ahol a deriváltak az optimális megoldás mentén értendők.
Parciális integrálással elimináljuk a  -tól való függést
-tól való függést
| (388) |

Mivel  adott, az első tag eltűnik és kapjuk, hogy
adott, az első tag eltűnik és kapjuk, hogy

| (389) |

Az optimalitáshoz megköveteljük,hogy  minden
minden  és
és  esetén, így megkapva a tétel feltételeit.
esetén, így megkapva a tétel feltételeit.
A továbbiakban a lineáris kvadratikus (LQ) optimális szabályozási feladatot tekintjük: a dinamikus rendszer lineáris időinvariáns és a költségfüggvény kvadratikus, azaz
| (390) |

| (391) |

ahol  az állapothibát bünteti,
az állapothibát bünteti,  a szabályozó bemenetet és
a szabályozó bemenetet és  a végső állapotot súlyozza.
a végső állapotot súlyozza.
A  és
és  tervezési paraméterek meghatározzák az állapotok lineáris kombinációinak és az input energia fontosságát (súlyát):
tervezési paraméterek meghatározzák az állapotok lineáris kombinációinak és az input energia fontosságát (súlyát):
- A funkcionálban szereplő  tag a rendszer minőségi jellemzőit súlyozza, a rendszer teljes energiáját bünteti egy
tag a rendszer minőségi jellemzőit súlyozza, a rendszer teljes energiáját bünteti egy  súlymátrix segítségével
súlymátrix segítségével
- A funkcionálban szereplő  tag a rendszerbe betáplált szabályozó energiát súlyozza,
tag a rendszerbe betáplált szabályozó energiát súlyozza,  mátrix segítségével.
mátrix segítségével.
Gyakran a feladatot úgy módosítjuk, hogy egy adott  pálya követése legyen az elérendő cél, a költségfüggvényt ehhez a
pálya követése legyen az elérendő cél, a költségfüggvényt ehhez a  és
és  tagokkal írjuk át. Van, amikor célszerű a végső
tagokkal írjuk át. Van, amikor célszerű a végső  pontot is előírni, ilyenkor egy általánosabb
pontot is előírni, ilyenkor egy általánosabb  megszorítást használhatunk. Amikor minden komponensre megszorítás van, azaz
megszorítást használhatunk. Amikor minden komponensre megszorítás van, azaz  , a vonatkozó specifikáció alakja
, a vonatkozó specifikáció alakja  lesz. Ilyenkor
lesz. Ilyenkor  elhagyható, mivel értéke rögzített.
elhagyható, mivel értéke rögzített.
Fontos eset, amikor  és
és  , azaz a végtelen horizontú LQ feladat.
, azaz a végtelen horizontú LQ feladat.
10.1. Lineáris kvadratikus regulátor
10.1.1. Véges horizontú LQR
A véges horizontú lineáris kvadratikus regulátor(LQR) feladat alakja
| (392) |

az alábbi költségfüggvénnyel:
| (393) |

ahol  .
.
A feladathoz tartozó  Hamilton függvény
Hamilton függvény
| (394) |

A maximum elv alkalmazásával az alábbi szükséges feltételeket kapjuk:
| (395) |

| (396) |

| (397) |
Innen az optimális irányítás alakja
| (398) |

Az optimális irányítás előállításához egy peremértékfeladatot kell megoldani  és
és  peremfeltételekkel, ami általában egy nehéz feladat.
peremfeltételekkel, ami általában egy nehéz feladat.
A társváltozót a  alakban keressük, így
alakban keressük, így
| (399) |

azaz
| (400) |

amit Riccati differenciál egyenletnek nevezünk.
10.1.2. Végtelen horizontú LQR feladat
A  esetben a
esetben a  feltételből adódik a költségfüggvény alakja:
feltételből adódik a költségfüggvény alakja:
| (401) |
Mivel  végső értékére nincs megszorítás, a
végső értékére nincs megszorítás, a  helyett állandó
helyett állandó  mátrixot véve kapjuk a
mátrixot véve kapjuk a
| (402) |

algebrai Riccati egyenletet, és a hozzá tartozó
| (403) |

szabályozót.
Míg  feltételnek mindég teljesülni kell, tipikusan
feltételnek mindég teljesülni kell, tipikusan  . A
. A  alakot véve a költségfüggvény
alakot véve a költségfüggvény
| (404) |
Az optimális irányítás létezéséhez az  párnak detektálhatónak kell lenni.
párnak detektálhatónak kell lenni.
Tétel 9.2 Tekintsük a
| (405) |

lineáris rendszert a
| (406) |

költségfüggvénnyel, ahol az  pár stabilizálható és az
pár stabilizálható és az  megfigyelhető.
megfigyelhető.
Az optimális szabályozó alakja
| (407) |

ahol  a
a
| (408) |

algebrai Riccati egyenlet stabilizáló megoldása. A minimális költség  .
.
Bizonyítás 9.1 Ha  stabil a
stabil a
| (409) |
Lyapunov egyenletnek egyértelmű megoldása van:  , minden
, minden  esetén. Ha
esetén. Ha  vagy
vagy  és
és  megfigyelhető, akkor
megfigyelhető, akkor  .
.
Ha  stabil akkor az
stabil akkor az  -hoz tartozó megoldás
-hoz tartozó megoldás  . Ha
. Ha  stabilizálható, akkor van
stabilizálható, akkor van  stabilizáló visszacsatolás melyre
stabilizáló visszacsatolás melyre  . E pálya mentén
. E pálya mentén
| (410) |
| (411) |

vagyis az optimális költség véges..
Egy t  -vel minden
-vel minden  -ra, melyre
-ra, melyre  tekintsük a
tekintsük a  kvadratikus funkcionált. Mivel
kvadratikus funkcionált. Mivel
| (412) |

minden stabil pálya mentén a
| (413) |

költség invariáns a visszacsatolásra. Teljes négyzetté való kiegészítéssel kapjuk, hogy
| (414) |

ahol  választással
választással  -re előírható, hogy kielégítse az
-re előírható, hogy kielégítse az
| (415) |

algebrai Riccati egyenletet. Ekkor az optimális irányítás  és az optimális költség
és az optimális költség  .
.
A megfigyelhetőség szerepének illusztrálására tekintsük a stabil  zárt kört. Ekkor algebrai Riccati egyenletből
zárt kört. Ekkor algebrai Riccati egyenletből
| (416) |

vagyis a zárt kör pályája mentén
| (417) |

Így  . Ha
. Ha  nemszinguláris lenne, létezne egy
nemszinguláris lenne, létezne egy  kezdeti érték, melyre
kezdeti érték, melyre  , ami ellent mond
, ami ellent mond  megfigyelhetőségének. .
megfigyelhetőségének. .
Másrészt ha  és
és  egy sajátvektor, sajátérték párja
egy sajátvektor, sajátérték párja  -nek, akkor
-nek, akkor
| (418) |

azaz  . Feltéve, hogy
. Feltéve, hogy  , következik, hogy
, következik, hogy  és
és  , vagyis
, vagyis  .Ebből
.Ebből  adódna, ami ellentmond
adódna, ami ellentmond  megfigyelhetőségének. Tehát a pozitív definit megoldás stabilizáló a megfigyelhetőségi feltétel mellett.
megfigyelhetőségének. Tehát a pozitív definit megoldás stabilizáló a megfigyelhetőségi feltétel mellett.
Az egyértelműség kimutatásához tekintsünk  és
és  megoldásokat úgy, hogy
megoldásokat úgy, hogy  és
és  stabilis.
stabilis.
Következik, hogy
| (419) |

A  Sylvester operátor akkor és csak akkor szinguláris ha
Sylvester operátor akkor és csak akkor szinguláris ha  és
és  közös sajátértékekkel rendelkezik. Mivel
közös sajátértékekkel rendelkezik. Mivel  és
és  stabil, ezért az egyedüli megoldás
stabil, ezért az egyedüli megoldás  .
.
10.1.3. Általános végtelen horizontú LQR feladat
Általános performancia jelet tekintve a költségfüggvény a
performancia jelet tekintve a költségfüggvény a
| (420) |
alakot veszi fel.
Ennek a feladathoz ugyancsak az algebrai Riccati egyenlet stabilizáló  megoldása
megoldása
| (421) |

szolgáltatja az optimális szabályozót:
| (422) |

a  optimális költséggel.
optimális költséggel.
Példa 9.1
Tervezzen LQ optimális szabályozást a
| (423) |

átviteli függvénnyel leírt rendszerre, ha az irányíthatósági állapottér reprezentációjában mérjük a rendszer állapotait a következő költségfüggvény minimalizálásával:
| (424) |
ahol az  súly adott. Tervezze meg a
súly adott. Tervezze meg a  súly értékét! Tervezze meg az optimális állapotvisszacsatolást!
súly értékét! Tervezze meg az optimális állapotvisszacsatolást!
A feladat megoldása:
Az állapottér reprezentáció irányíthatósági alakban:
| (425) |

| (426) |

A feladatot visszavezetjük az optimalizálás standard alakjára az  összefüggés felhasználásával:
összefüggés felhasználásával:
| (427) |
azaz az állapotokat súlyozó mátrix  .
.
A Riccati egyenlet megoldása:
| (428) |

ahol  ,
,  ,
,  ,
,  . A megoldás:
. A megoldás:  .
.
Az állapot-visszacsatolt erősítő:
| (429) |
azaz az optimális irányítójel:  .
.
Az LQ megoldás robusztussága
- A zárt rendszer mindig stabil lesz. Az LQ tervezés a szabályozott rendszer pólusait automatikusan a bal oldali félsíkba helyezi.
- Az LQ optimális megoldás a végtelen erősítési tartalékot és a  -os fázistartalékot biztosít.
-os fázistartalékot biztosít.
| (430) |

| (431) |

Példa 9.2
Tervezzünk optimális állapot visszacsatolást LQ módszerrel a következő rendszerhez:
| (432) |
A tervezési paraméterek:  és
és  .
.
A feladat megoldása:
(a) Riccati egyenlet megoldása:
| (433) |

A CARE megoldása:  .
.
(b)  számítása:
számítása:
| (434) |

Az optimális állapotvisszacsatolás:

és
az optimális irányítójel:  .
.
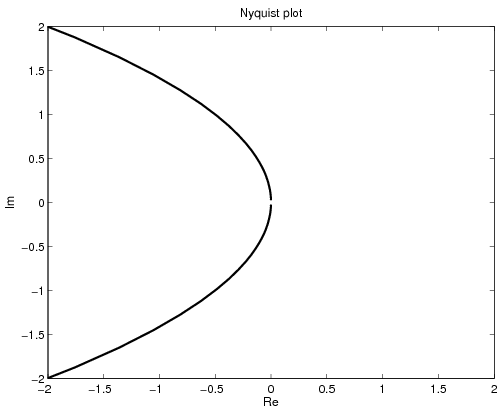
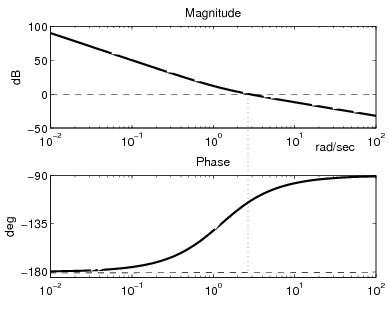
| (435) |

| (436) |

10.2. Pólusok és zérusok
A szabályozott rendszer pólusai a  karakterisztikus egyenlet megoldásai. A Hamilton mátrix tartalmazza az optimális irányítás megoldásait, így sajátértékei az optimális megoldás pólusait is megadják.
karakterisztikus egyenlet megoldásai. A Hamilton mátrix tartalmazza az optimális irányítás megoldásait, így sajátértékei az optimális megoldás pólusait is megadják.
| (437) |
Felhasználva a  összefüggést, felírhatjuk a Hamilton mátrixra vonatkozó karakterisztikus egyenletet:
összefüggést, felírhatjuk a Hamilton mátrixra vonatkozó karakterisztikus egyenletet:
| (438) |
| (439) |

A karakterisztikus egyenlet (a levezetést mellőzve) a következő alakra hozható:
| (440) |

| (441) |

A Hamilton rendszer pólusai tartalmazzák a zárt rendszer pólusait, valamint a pólusok ellenkező előjelű értékeit egyaránt.
Vizsgáljuk meg, hogy a szabályozó tervezésben alkalmazott súlyozás hogyan hat a szabályozott rendszer pólusaira. Válasszuk meg az irányítójelre adott súlyt a következőképpen:

ahol  rögzített és
rögzített és  értékét változtatjuk.
értékét változtatjuk.
Válasszuk az irányítójelre adott súlyt nagy értékre:  .
.
Az irányítási feladatot minél kisebb irányítójellel kívánjuk megoldani.
A karakterisztikus egyenlet a következő alakhoz tart:
| (442) |

A szabályozott rendszer pólusai megközelítik az eredeti rendszer stabil pólusait, valamint az eredeti rendszer nemstabil pólusainak a képzetes tengelyre való tükörképét.
Válasszuk az irányítójelre adott súlyt kis értékre:  .
.
Az irányítási feladatban nincs előírás az irányítójel nagyságára nézve.
A karakterisztikus egyenlet a következő alakhoz tart:
| (443) |

| (444) |

Átalakítva:
| (445) |

A szabályozott rendszer pólusai megközelítik az eredeti rendszer bal félsíkra eső zérusait vagy az eredeti rendszer jobb oldali zérusainak a képzetes tengelyre való tükörképét, illetve végtelenül nagy negatív értéket vesznek fel.
Példa 9.3
Tervezzünk optimális állapot visszacsatolást LQ módszerrel a következő rendszerhez:
| (446) |
| (447) |

A rendszer pólusai  , zérusai
, zérusai  . A tervezési paraméterek:
. A tervezési paraméterek:  és
és  változó. Megjegyzés: Az első állapotváltozót tekintjük kimenetnek, a többi állaptváltozóra
változó. Megjegyzés: Az első állapotváltozót tekintjük kimenetnek, a többi állaptváltozóra  súlyt alkalmazunk a tervezésben.
súlyt alkalmazunk a tervezésben.
A feladat megoldása:
-  választással a Hamilton mátrix sajátértékei:
választással a Hamilton mátrix sajátértékei:  , míg a tervezett szabályozott rendszer pólusai:
, míg a tervezett szabályozott rendszer pólusai:  ,
,
-  választással a Hamilton mátrix sajátértékei:
választással a Hamilton mátrix sajátértékei:  , míg a tervezett szabályozott rendszer pólusai:
, míg a tervezett szabályozott rendszer pólusai:  ,
,
Példa 9.4
Tervezzünk optimális állapot visszacsatolást LQ módszerrel a következő nem minimálfázisú rendszerhez:
| (448) |
| (449) |

A rendszer pólusai  , zérusai
, zérusai  (pozitív). A tervezési paraméterek:
(pozitív). A tervezési paraméterek:  és
és  változó. Megjegyzés: Az első állapotváltozót tekintjük kimenetnek, a többi állaptváltozóra
változó. Megjegyzés: Az első állapotváltozót tekintjük kimenetnek, a többi állaptváltozóra  súlyt alkalmazunk a tervezésben.
súlyt alkalmazunk a tervezésben.
A feladat megoldása:
-  választással a Hamilton mátrix sajátértékei:
választással a Hamilton mátrix sajátértékei:

,
míg a tervezett szabályozott rendszer pólusai:  ,
,
-  választással a Hamilton mátrix sajátértékei:
választással a Hamilton mátrix sajátértékei:

,
míg a tervezett szabályozott rendszer pólusai:  ,
,
A módszer alkalmazásának feltétele:
- Az állapotvektor elemei mértek legyenek.
- Az állapottér reprezentáció teljesítse az irányíthatósági feltételt.
A módszer előnyei:
- A szabályozott rendszer stabilis.
- A szabályozással szemben megfogalmazott minőségi követelmények a  és
és  súlyok megválasztásával beépíthetők a szabályozás tervezésbe.
súlyok megválasztásával beépíthetők a szabályozás tervezésbe.
A módszer hátrányai:
- A különböző minőségi követelmények közötti ellentmondások és konfliktusok miatt a súlyok megválasztása bonyolult feladat. A súlyok tervezése során törekedni kell a minőségi követelmények közötti összhang megteremtésére. Emiatt az elért minőségi tulajdonságokat utólagosan ellenőrizni kell.
- A Riccati egyenlet megoldása numerikusan nehéz feladat.
11. fejezet - Megfigyelőtervezés és szeparációs elv
11.1. Tervezési feladat
Az eddigiekben feltételeztük, hogy a rendszer állapotát mérni tudjuk. Az állapot ismerete szükséges az állapot-visszacsatolt szabályzó tervezéséhez. Ha nem ismerjük az  állapotvektort, akkor egy olyan
állapotvektort, akkor egy olyan  (azonos dimenziójú) mennyiséget képzünk, mely aszimptotikusan közelíti az eredeti állapotot, tehát
(azonos dimenziójú) mennyiséget képzünk, mely aszimptotikusan közelíti az eredeti állapotot, tehát
| (450) |

miközben  .
.
Ha ismert  akkor
akkor
| (451) |
| (452) |

| (453) |

ahol az állapot-becslés hibája  minden
minden  . Az állapotbecslés hibájának időbeli változását annak differenciál egyenlete adja meg:
. Az állapotbecslés hibájának időbeli változását annak differenciál egyenlete adja meg:
| (454) |
Levezethető, hogy  kezdeti értékkel egy homogén lineáris differenciál-egyenlet:
kezdeti értékkel egy homogén lineáris differenciál-egyenlet:
| (455) |

Vizsgáljuk az egyenlet megoldását:
| (456) |
| (457) |

| (458) |

Ha  nem zérus, akkor az állapothiba lecseng, feltéve hogy az
nem zérus, akkor az állapothiba lecseng, feltéve hogy az  mátrix stabil azaz,
mátrix stabil azaz,  ,
,  . és így
. és így  miközben
miközben  .
.
Megjegyzés: Ha  instabil, illetve ha a tervező befolyásolni akarja az
instabil, illetve ha a tervező befolyásolni akarja az
állapothiba lecsengését, akkor visszacsatolást kell alkalmazni.
Az állapotegyenlet:
| (459) |

ahol  ,
,  -nek
-nek  sora van. Ekkor az állapothiba
sora van. Ekkor az állapothiba
| (460) |
| (461) |
ha adott  akkor
akkor  . Így az
. Így az  minden elemét módosítani tudjuk, és minden sajátértékét tetszőlegesen meg tudjuk választani.
minden elemét módosítani tudjuk, és minden sajátértékét tetszőlegesen meg tudjuk választani.
11.2. Állapotmegfigyelő tervezése
A megfigyelhetőségi és az irányíthatósági alakok között a dualitás teremt kapcsolatot. A két állapottér ekvivalens állapotterek:
| (462) |

| (463) |

| (464) |

A megfigyelő tervezés adott  esetén, ismert
esetén, ismert  mellett
mellett  (
( ) megválasztásával történik.
) megválasztásával történik.
A módosult állapotmátrix alakja a következő:
| (465) |
A megfigyelő  erősítésére vonatkozó összefüggést dualitással kapjuk, ahol elvégezzük az alábbi megfeleltetéseket:
erősítésére vonatkozó összefüggést dualitással kapjuk, ahol elvégezzük az alábbi megfeleltetéseket:
| (466) |

| (467) |

| (468) |

amivel ellenőrizhető, hogy  .
.
| (469) |

A dualitási elvből levezetett és a megfigyelő tervezésére vonatkozó Bass Gura formula az alábbi:
| (470) |

ahol  a megfigyelő karakterisztikus egyenletének együtthatóiból képzett vektor. Az állapotmegfigyelővel ellátott körben a megfigyelő, mint dinamikus rendszer
a megfigyelő karakterisztikus egyenletének együtthatóiból képzett vektor. Az állapotmegfigyelővel ellátott körben a megfigyelő, mint dinamikus rendszer
| (471) |
| (472) |

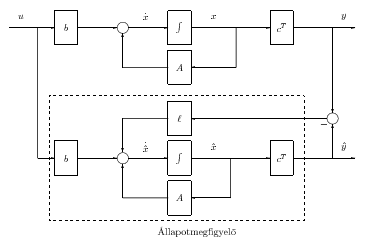
Példa 10.1
Tervezzen megfigyelőt az alábbi megfigyelhetőségi állapottér reprezentációban ismert rendszerre:
| (473) |
A tervezést pólusallokációs módszerrel végezze el  és
és  pólusokkal. Írja fel a megfigyelő állapotegyenletét! Adja meg a megfigyelő állapotegyenletének
pólusokkal. Írja fel a megfigyelő állapotegyenletét! Adja meg a megfigyelő állapotegyenletének  vektorát!
vektorát!
A feladat megoldása:
Az eredeti rendszer karakterisztikus polinomja:


A megfigyelt rendszer karakterisztikus polinomja:


Az eredeti és tervezett karakterisztikus polinom együtthatók alapján az megfigyelő erősítései a következők: 
| (474) |
Példa 10.2
Tervezzen megfigyelőt  és
és  pólusokkal az alábbi állapottér reprezentációban ismert rendszerre:
pólusokkal az alábbi állapottér reprezentációban ismert rendszerre:
| (475) |
A megfigyelő tervezését az állapotvisszacsatolásnál megismert elvek alapján végezzük el. Az irányíthatósági alakból a megfigyelhetőségi alak közvetlenül megkapható:
| (476) |
A megfigyelő tervezését az  és
és  mátrixok alapján végezzük el pólusallokációs módszerrel. Vegyük észre, hogy ez a rendszer nem irányíthatósági alakú, ezért a transzformációs mátrixot meg kell határozni.
mátrixok alapján végezzük el pólusallokációs módszerrel. Vegyük észre, hogy ez a rendszer nem irányíthatósági alakú, ezért a transzformációs mátrixot meg kell határozni.
A rendszer karakterisztikus polinomja:
| (477) |


A szabályozott rendszer karakterisztikus polinomja:
| (478) |


Az eredeti és tervezett karakterisztikus polinomok együtthatói alapján az erősítések a következők:  . Az erősítő a megfigyelhetőségi alakra alkalmazható, ezért át kell transzformálni az eredeti állapottérbe.
. Az erősítő a megfigyelhetőségi alakra alkalmazható, ezért át kell transzformálni az eredeti állapottérbe.
A transzformációs mátrix számítása:
| (479) |
| (480) |
Az erősítő számítása:
| (481) |

A dualitás elvét használva a megfigyelő értéke:
| (482) |
11.3. Dinamikus állapotvisszacsatolás
A szabályozást a becsült állapotvisszacsatolással képezve kimenőjel visszacsatolásról beszélünk.
| (483) |

Kombinált állapot visszacsatolást és megfigyelőt tartalmazó szabályozó struktúra:
Rendszer
| (484) |

| (485) |

Megfigyelő
| (486) |
| (487) |

Irányítás:
| (488) |

A becsült állapot dinamikája:

| (489) |

A becslés hibája:  ,
,
továbbá a hiba dinamikája:  .
.
Részletesen kifejtve:


| (490) |

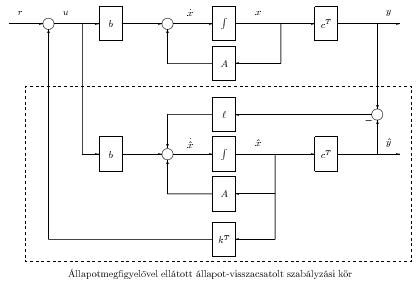
Kombináljuk ezt az egyenletet a rendszer állapot egyenletével:
| (491) |
Figyelembe véve a control inputot:
| (492) |

az állapotegyenlet:


| (493) |

Kombinált rendszer:
| (494) |
A zárt rendszer karakterisztikus polinomja:
| (495) |

A szabályozott rendszer karakterisztikus egyenlete a következő két egyenlettel (és azok megoldásával) azonos:
| (496) |
| (497) |

Következtetés:
A szabályozott rendszer pólusai az LQ rendszer karakterisztikus egyenletének és a megfigyelő rendszer karakterisztikus egyenletének megoldásai.
Tétel 10.1 A megfigyelővel és állapot-visszacsatolt szabályzóval ellátott zárt rendszer karakterisztikus polinomja
| (498) |

Következmény 10.1 Az állapot-visszacsatolt szabályzó és a megfigyelő függetlenül tervezhető. Az optimális állapot visszacsatolás és a megfigyelő tervezés egymástól függetlenül végrehajtható. A szabályozott rendszer struktúrájában az egyes tervezési eredményeket kombináljuk.
-  megválasztásával az állapotvisszacsatolást tervezzük és a pólusokat az alábbi értékekbe helyezzük:
megválasztásával az állapotvisszacsatolást tervezzük és a pólusokat az alábbi értékekbe helyezzük:
| (499) |

-  megfigyelő tervezésével a pólusokat a következő helyekre tesszük:
megfigyelő tervezésével a pólusokat a következő helyekre tesszük:
| (500) |

12. fejezet - H2 irányítások tervezése
Az előzőekben bemutattuk az LQR probléma megoldását statikus állapot visszacsatolással. A gyakorlatban azonban nem mindig áll rendelkezésre a teljes állapot. Ezért módosítani szükséges a probléma kitűzését arra az esetre, ha csak dinamikus kimenet-visszacsatolás megengedett. A klasszikus sztochasztikus irányításelmélet keretei között ez vezet el a lineáris kvadratikus Gauss eloszlást feltételező (LQG) feladathoz.
Tekintsük az alábbi performancia funkcionált
| (501) |

ahol  és
és  adott szimmetrikus pozitív definit mátrixok valamint
adott szimmetrikus pozitív definit mátrixok valamint  az irányító bemenet. Az állapotegyenlet valamint az
az irányító bemenet. Az állapotegyenlet valamint az  megfigyelési egyenlet a következő:
megfigyelési egyenlet a következő:
| (502) |

| (503) |
ahol  és
és  független fehér zaj folyamatok. A cél egy
független fehér zaj folyamatok. A cél egy  irányítás tervezése az
irányítás tervezése az  megfigyelések alapján, ahol az
megfigyelések alapján, ahol az  irányító jel minimalizálja a
irányító jel minimalizálja a  kritériumfüggvény várható értékét.
kritériumfüggvény várható értékét.
A továbbiakban ennek a feladatnak a determinisztikus változatával foglalkozunk, az úgynevezett optimális  irányítástervezéssel, aminek kiindulópontja az 53 ábrán látható általános rendszerstruktúra.A
irányítástervezéssel, aminek kiindulópontja az 53 ábrán látható általános rendszerstruktúra.A  feladat során egy olyan
feladat során egy olyan  irányítás tervezése a cél, ami egyrészt stabilizálja a zárt hurkot valamint minimalizálja a
irányítás tervezése a cél, ami egyrészt stabilizálja a zárt hurkot valamint minimalizálja a  rendszer normát.
rendszer normát.
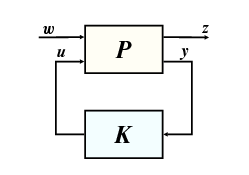
Az alábbiakban egy megoldást adunk a  kimenet-visszacsatolásos feladatra. A levezetés először a kimenet-visszacsatolásos feladatot több specifikus, egyszerüsített feladatra vezeti vissza amelyek valamilyen módon mind az úgynevezett teljes információjú
kimenet-visszacsatolásos feladatra. A levezetés először a kimenet-visszacsatolásos feladatot több specifikus, egyszerüsített feladatra vezeti vissza amelyek valamilyen módon mind az úgynevezett teljes információjú  probléma variációi. Ez utóbbi feladat megoldását egy klasszikus optimális irányítási problémára vezetjük vissza.
probléma variációi. Ez utóbbi feladat megoldását egy klasszikus optimális irányítási problémára vezetjük vissza.
12.1. Speciális irányítási feladatok
A  feladat megoldása az egyszerüsített kimenet-visszacsatolásos -- output feedback (OF) -- probléma megoldásán alapszik, amihez az alábbi általános rendszerstruktúra tartozik:
feladat megoldása az egyszerüsített kimenet-visszacsatolásos -- output feedback (OF) -- probléma megoldásán alapszik, amihez az alábbi általános rendszerstruktúra tartozik:
| (504) |
ahol
| (505) |

| (506) |
A  és
és  rendszermátrixokra kirótt speciális feltételek, (505) és (506), az egyszerüsített feladat ortogonalitási feltételei. Meg lehet mutatni, hogy a általános kimenet-visszacsatolásos problémát mindig vissza lehet vezetni erre a specifikus formára. Az egyszerűsített probléma lehetővé teszi számunkra, hogy világosabban mutassunk rá az optimális
rendszermátrixokra kirótt speciális feltételek, (505) és (506), az egyszerüsített feladat ortogonalitási feltételei. Meg lehet mutatni, hogy a általános kimenet-visszacsatolásos problémát mindig vissza lehet vezetni erre a specifikus formára. Az egyszerűsített probléma lehetővé teszi számunkra, hogy világosabban mutassunk rá az optimális  irányítás alapvető tulajdonságaira.
irányítás alapvető tulajdonságaira.
Az egyszerűsített probléma három másik specifikus feladattal van összefüggésben: teljes információs (full information) (FI), előrecsatolt zavarás (disturbance feedforward) (DF), és kimenet becslés (output estimation) (OE). Ebben a részben megfogalmazzuk ezeket a feladatokat és kimutatjuk egymáshoz való viszonyukat. Minden esetben feltételezzük az ortogonalitási feltételek teljesülését.
A teljes információs (FI) feladathoz tartozó általános rendszerstruktúra alakja
| (507) |
vagyis az irányítás mind a teljes  állapotot mind a
állapotot mind a  zavaró bemenetet felhasználhatja.
zavaró bemenetet felhasználhatja.
A előrecsatolt zavarás (DF) feladathoz tartozó általános rendszerstruktúra alakja
| (508) |
vagyis a  zavaró bemenet közvetlenül mérhető.
zavaró bemenet közvetlenül mérhető.
A kimenet becslési (OE) feladathoz tartozó általános rendszerstruktúra alakja
| (509) |
ami egy állapotmegfigyelővel hozható összeffüggésbe.
Az alábbi alakból
| (510) |
nyilvánvaló, hogy az OE és DF feladatok egymás algebrai duálisai. Mivel
| (511) |


akkor és csak akkor stabilizálja  -t ha
-t ha  stabilizálja
stabilizálja  -t. Mivel a DF és OE problémák duálisak, a DF megoldását fel tudjuk használni az OE szabályozó előállítására.
-t. Mivel a DF és OE problémák duálisak, a DF megoldását fel tudjuk használni az OE szabályozó előállítására.
Az FI és DF feladatok abban az értelemben azonosak, hogy ha mindketten ugyan azzal a szabályozóval stabilizálhatók, akkor a zárt körök megegyeznek. Mivel a FI és a DF feladatok egyenértékűek az FI megoldását fel tudjuk használni a DF szabályozó megkonstruálására.
Lemma 11.1 Tegyük fel, hogy  asszimptotikusan stabilis. Ekkor
asszimptotikusan stabilis. Ekkor
-
| (512) |

-
| (513) |

ahol
| (514) |
Bizonyítás 11.1 Az első tulajdonság az alábbi összefüggésnek a következménye:
| (515) |
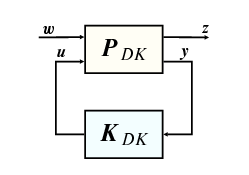
A második tulajdonság kimutatásához  és
és  Redheffer szorzatát kell meghatározni:
Redheffer szorzatát kell meghatározni:
| (516) |
| (517) |
| (518) |

| (519) |

| (520) |

| (521) |
ahol  a
a  állapot vektora és
állapot vektora és  a
a  állapot vektora. A transzformáció sematikus vázlata a 11.1 ábrán látható.
állapot vektora. A transzformáció sematikus vázlata a 11.1 ábrán látható.
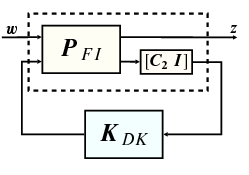
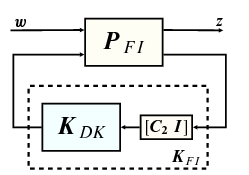
Az  hibavektor bevezetésével a transzformált állapotegyenletek a következők:
hibavektor bevezetésével a transzformált állapotegyenletek a következők:
| (522) |
| (523) |
| (524) |

| (525) |
Mivel feltettük, hogy  stabilis és
stabilis és 
| (526) |
vagyis
| (527) |

Összefoglalásként, mindhárom feladat megoldása visszavezethető egy alkalmas teljes információs (FI) probléma megoldására.
12.2. Teljes információs (FI) szabályozó
Ahhoz, hogy a  rendszernormát minimalizáljuk a stabilizáló
rendszernormát minimalizáljuk a stabilizáló  szabályozók függvényében, véges horizontú feladok megoldását állítjuk elő, amik konvergálnak az optimális
szabályozók függvényében, véges horizontú feladok megoldását állítjuk elő, amik konvergálnak az optimális  szabályozóhoz.
szabályozóhoz.
A véges  horizontú feladat költségfüggvénye
horizontú feladat költségfüggvénye
| (528) |
ahol  . A megjelenő második tag a hiányzó
. A megjelenő második tag a hiányzó  cél állapottal van összefüggésben. Mivel
cél állapottal van összefüggésben. Mivel  , a költségfüggvény az alábbi alakra hozható:
, a költségfüggvény az alábbi alakra hozható:
| (529) |

ami megegyezik az LQ/LQG performancia kritériummal, ha  és
és  .A szükséges optimalitási feltételek egy teljes négyzetté alakítással kaphatók a
.A szükséges optimalitási feltételek egy teljes négyzetté alakítással kaphatók a  ,
,  és
és  egyszerüsítő ortogonalitási feltételek mellett.
egyszerüsítő ortogonalitási feltételek mellett.
Az LQ szabályozó levezetése során már látott módon bevezetjük az  mátrix függvényt,
mátrix függvényt,  , ami ki kell hogy elégítse az alábbi differenciál egyenletet:
, ami ki kell hogy elégítse az alábbi differenciál egyenletet:
| (530) |

Ekkor az
| (531) |

választással a performancia funkcionál alakja
| (532) |

Ahhoz, hogy az optimális FI  szabályozót megkapjuk a véges horizontú megoldások határértékeként, a terminális feltétel
szabályozót megkapjuk a véges horizontú megoldások határértékeként, a terminális feltétel  mátrixát minden
mátrixát minden  -re alkalmasan kell megválasztani.
-re alkalmasan kell megválasztani.
Legyen  olyan, amire
olyan, amire  asszimptotikusan stablilis. Ekkor van hozzá
asszimptotikusan stablilis. Ekkor van hozzá  Lyapunov függvény, azaz
Lyapunov függvény, azaz  amire
amire
| (533) |

Ez az egyenlet átírható az alábbi formába:
| (534) |

vagyis  kielégíti az
kielégíti az
| (535) |

egyenlőtlenséget. Kimutatható, hogy az  pár detektálható.
pár detektálható.
Ezzel a  választással legyen
választással legyen  az alábbil Riccati differenciál egyenlet megoldása:
az alábbil Riccati differenciál egyenlet megoldása:
| (536) |

Ekkor

| (537) |

amely egyenlet megoldása
| (538) |

ahol  és
és a
a  mátrixhoz tartozó alapmegoldás.Ekkor
mátrixhoz tartozó alapmegoldás.Ekkor  és mivel
és mivel az
az  mátrixfüggvény monoton nem-csökkenő
mátrixfüggvény monoton nem-csökkenő  -ben.
-ben.
A renszer időinvarianciáját felhasználva minden  -ra
-ra
| (539) |

Így  egy monoton nem-növekvő függvény
egy monoton nem-növekvő függvény  -ben.
-ben.
Mivel a Riccati egytenlet minden megoldására  és
és  bármely
bármely  esetén, az
esetén, az  mátrixfüggvény egyenletesen korlátos minden
mátrixfüggvény egyenletesen korlátos minden  -re.Ezért létezik a
-re.Ezért létezik a  határérték. Az időinvariancia miatt minden
határérték. Az időinvariancia miatt minden  és
és  esetén
esetén
| (540) |

Ebből következik, hogy a határérték egy konstans  mátrix, ami kielégíti. az alábbi algebrai Riccati egyenletet
mátrix, ami kielégíti. az alábbi algebrai Riccati egyenletet
| (541) |

A konstrukcióból hátra van még a stabilitás kimutatása. Először  stabilitását bizonyítjuk.Az egyszerűség kedvéért
stabilitását bizonyítjuk.Az egyszerűség kedvéért  jelölje az
jelölje az  mátrixot és
mátrixot és  .
.
Tekintsük az alábbi Lyapunov differencál egyenletet:
| (542) |

ahol .
. egy megfigyelgetősegi Gram mátrix, így
egy megfigyelgetősegi Gram mátrix, így  és
és  .Ismert, hogy
.Ismert, hogy  minden instabil módusa nem megfigyelhető
minden instabil módusa nem megfigyelhető  -ra.
-ra.
Legyen  az
az  egy instabil nem megfigyelhető módusa, azaz
egy instabil nem megfigyelhető módusa, azaz
| (543) |

| (544) |

A Lyapunov egyenletet kétoldalról szorozva  és
és  vektorokkal adódik, hogy
vektorokkal adódik, hogy  .Ebből következik, hogy
.Ebből következik, hogy  vagy
vagy  .
.
Az első esetben a Lyapunov egyenletet  -el szorozva adódik, hogy
-el szorozva adódik, hogy  .Azonban
.Azonban  stabilizálható, vagyis minden instabil mód irányítható.Ebből következik, hogy
stabilizálható, vagyis minden instabil mód irányítható.Ebből következik, hogy  .
.
Tegyük fel tehát, hogy  .A Riccati egyenletet
.A Riccati egyenletet  -el jobbról szorozva adódik, hogy
-el jobbról szorozva adódik, hogy  , amiből következik, hogy
, amiből következik, hogy  bármely
bármely  esetén, azaz
esetén, azaz  .Tehát
.Tehát  instabil de megfigyelhető
instabil de megfigyelhető  -re, ami ellentmond a rendszer detektálhatóságának és
-re, ami ellentmond a rendszer detektálhatóságának és  megválasztásának.Így
megválasztásának.Így  asszimptotikusan stabilis. Folytonossági megfontolás alapján
asszimptotikusan stabilis. Folytonossági megfontolás alapján
| (545) |
minden  -re. Ki kell még mutatnunk, hogy egyenlőség nem állhat fenn.
-re. Ki kell még mutatnunk, hogy egyenlőség nem állhat fenn.
Feltéve, hogy létezik  és
és  úgy, hogy
úgy, hogy
| (546) |
a Riccati egyenletből következik, hogy


| (547) |

azaz,  és
és  , ezért
, ezért  .Mivel
.Mivel  detektálható ezért
detektálható ezért  nem tűnhet el, ami ellentmondás. Tehát a határérték egy asszimptotikusan stabilis megoldást ad.
nem tűnhet el, ami ellentmondás. Tehát a határérték egy asszimptotikusan stabilis megoldást ad.
Végezetül meg kell mutatni, hogy a határérték egy  optimális szabályozó.Jelölje
optimális szabályozó.Jelölje  ezt a határérték szabályozót.
ezt a határérték szabályozót.
Az FI rendszer és egy tetszőleges
| (548) |
szabályozó az alábbi zárt kört eredményezi:
| (549) |

| (550) |

A  norma
norma
| (551) |

ahol  a rendszer megfigyelhetőségi Gram mátrixa ami kielégíti az alábbi Lyapunov egyenletet
a rendszer megfigyelhetőségi Gram mátrixa ami kielégíti az alábbi Lyapunov egyenletet
| (552) |

Legyen
| (553) |

ahol  kielégíti a következő algebrai Riccati egyenletet
kielégíti a következő algebrai Riccati egyenletet
| (554) |

Ekkor  kielégíti az alábbi Lyapunov egyenletet
kielégíti az alábbi Lyapunov egyenletet
| (555) |

Itt  a
a  rendszer megfigyelhetőségi Gram mátrixa.Mivel
rendszer megfigyelhetőségi Gram mátrixa.Mivel  asszimptotikusan stablilis, ez a Gram mátrix pozitív definit, tehát
asszimptotikusan stablilis, ez a Gram mátrix pozitív definit, tehát  .
.
Kimutattuk tehát, hogy minden  FI szabályozóra
FI szabályozóra
| (556) |


választással, azaz  és
és  esetén
esetén  . Ekkor
. Ekkor
| (557) |

tehát ez egy  optimális irányítás.
optimális irányítás.
12.3. H2 optimális DF és OE szabályozók
Mint azt már láttuk az optimális DF és OE szabályozók megkaphatók egy FI feladat megoldásaként.
Feltéve, hogy  asszimptotikusan stabilis, ha
asszimptotikusan stabilis, ha  stabilizálja
stabilizálja  -t, akkor
-t, akkor  stabilizálja
stabilizálja  -et, ahol
-et, ahol
| (558) |
A zárt kör egyenletei

| (559) |

| (560) |

így
| (561) |
ahol  az FI feladat optimális állapot visszacsatolása.
az FI feladat optimális állapot visszacsatolása.
Az OE feladat megoldása az OE és DF problémák dualitását felhasználva adódik:
| (562) |

Következik, hogy
| (563) |
ahol  és
és  kielégíti az algebraic Riccati egyenletet
kielégíti az algebraic Riccati egyenletet
| (564) |

Így az eredeti OE feladat megoldása
| (565) |
12.4. Egyszerűsített OF optimális  irányítás
irányítás
Az egyszerüsített OF rendszer alakja
| (566) |
ahol az ortogonalitási feltételek
| (567) |

| (568) |

fennállnak.
A szabályozó tervezésénél hasznos úgy tekinteni a rendszert mint amit egy teljes sztatikus  állapotirányítás és egy zavarás vezérel. A zavarás szerepe, hogy kompenzálja a teljes állapot ismeretének hiányát.
állapotirányítás és egy zavarás vezérel. A zavarás szerepe, hogy kompenzálja a teljes állapot ismeretének hiányát.
Az FI irányítás minimalizálja  energia normáját minden
energia normáját minden  zavaró jelre. Hogy az
zavaró jelre. Hogy az  eltérésének hatását az
eltérésének hatását az  hatásától a kimeneten vizsgálhassuk, bevezetjük az új
hatásától a kimeneten vizsgálhassuk, bevezetjük az új
| (569) |

bemenetet, aminek segítségével átírjuk az állapotegyenleteket:
| (570) |

| (571) |

| (572) |
A kapott rendszer
| (573) |
a  bemenetet képezi le a
bemenetet képezi le a  kimenetre.Vegyük észre, hogy
kimenetre.Vegyük észre, hogy  az OE alakban adott.
az OE alakban adott.
A  , és
, és  jeleket összekötő állapotegyenletek
jeleket összekötő állapotegyenletek

| (574) |


| (575) |

amik az alábbi rendszert határozzák meg
| (576) |

felbontását erre a két alrendszerre a 56 ábra szemlélteti.
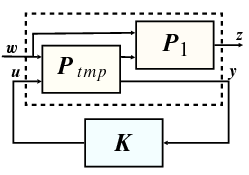
Mivel  az OE alakban adott, már tudjuk, hogyan határozzuk meg azt a szabályozót ami minimalizálja a
az OE alakban adott, már tudjuk, hogyan határozzuk meg azt a szabályozót ami minimalizálja a  zárt kör
zárt kör  normáját. A kérdés az, hogy ez a szabályozó minimalizálja-e
normáját. A kérdés az, hogy ez a szabályozó minimalizálja-e  normáját is.
normáját is.
A válaszhoz írjuk át a zárt kör egyenleteit az új  változó figyelembe vételével:
változó figyelembe vételével:

| (577) |

| (578) |

ahol  and
and  .
.
Mivel a  kimenet két hatás eredménye, a linearitás miatt írható,
kimenet két hatás eredménye, a linearitás miatt írható,  ahol
ahol  a
a  jel hatásának eredménye, feltéve, hogy
jel hatásának eredménye, feltéve, hogy  .A
.A  jel hasonló módon van definiálva.
jel hasonló módon van definiálva.
A  jelet meghatározó rendszer alakja
jelet meghatározó rendszer alakja
| (579) |
míg a  jel, amit
jel, amit  generál, az alábbi rendszer által van meghatározva
generál, az alábbi rendszer által van meghatározva
| (580) |
ahol
| (581) |
Mivel  kapjuk, hogy
kapjuk, hogy
| (582) |

Könnyű leellenőrizni, hogy  egy
egy  -es normát megtartó leképezés, tehát egy belső függvény, és
-es normát megtartó leképezés, tehát egy belső függvény, és  instabil.Ez utóbbi belátásához ki kell mutatni, hogy
instabil.Ez utóbbi belátásához ki kell mutatni, hogy  . Az
. Az  és
és  alakjaiból következik, hogy
alakjaiból következik, hogy
| (583) |
A  hasonlósági transzformáció alkalmazásával, ahol
hasonlósági transzformáció alkalmazásával, ahol  kielégíti az FI feladathoz tartozó algebrai Riccati egyenletet és kihasználva, hogy
kielégíti az FI feladathoz tartozó algebrai Riccati egyenletet és kihasználva, hogy  egy belső függvény, vagyis
egy belső függvény, vagyis
| (584) |
| (585) |

a transzformált rendszer állapotegyenleteire
| (586) |
adódik, azaz
| (587) |
Ebből következik, hogy  .
.
A két rendszer ortogonalitásából következik, hogy

| (588) |

ezért az optimális irányításnak ki kell elégíteni az alábbi egyenletet
| (589) |

A zárt kör  normáját minimalizáló
normáját minimalizáló  szabályozó a hozzárendelt
szabályozó a hozzárendelt  zárt kör minimalizálásával adódik, ahol
zárt kör minimalizálásával adódik, ahol
| (590) |
ami egy optimális OE feladat.
Tétel 11.1 Az egyszerüsített OF feladat optimális szabályozója
| (591) |
ahol  ,
,  , és
, és  valamint
valamint  kielégíti az alábbi FI és OE algebrai Riccati egyenletet:
kielégíti az alábbi FI és OE algebrai Riccati egyenletet:
| (592) |

| (593) |

Mivel az (592), (593) algebrai egyenletek nem csatoltak, ezért az OF szabályozó  és
és  erősítéseit egymástól függetlenül meg tudjuk határozni.
erősítéseit egymástól függetlenül meg tudjuk határozni. a teljes állapotvisszacsatolás erősítése míg
a teljes állapotvisszacsatolás erősítése míg  a Luenberger megfigyelőhöz tartozó erősítés.Az optimális kimenet visszacsatolásos
a Luenberger megfigyelőhöz tartozó erősítés.Az optimális kimenet visszacsatolásos  szabályozó alakja egy úgynevezett megfigyelő alapú szabályozó, ahol a megfigyelőt gyakran Kalman szűrőnek nevezzük.Így az optimális kimenet visszacsatolásos
szabályozó alakja egy úgynevezett megfigyelő alapú szabályozó, ahol a megfigyelőt gyakran Kalman szűrőnek nevezzük.Így az optimális kimenet visszacsatolásos  szabályozó tervezése során fenn áll a szeparációs elv.
szabályozó tervezése során fenn áll a szeparációs elv.
13. fejezet - Hinf. szabályozók tervezése
Bár az egyszerüsített kimenet-visszacsatolásos optimális  szabályozó kiszámítása jórészt az optimális
szabályozó kiszámítása jórészt az optimális  szabályozó levezetésénél alkalmazott lépéseket követi, vannak lényegi tulajdonságok, amik megkülönböztetik a két esetet.
szabályozó levezetésénél alkalmazott lépéseket követi, vannak lényegi tulajdonságok, amik megkülönböztetik a két esetet.
Egyrészt nyilvánvaló, hogy egy stabil lineáris  rendszerre es egy adott
rendszerre es egy adott  esetén
esetén  akkor es csak akkor, ha létezik
akkor es csak akkor, ha létezik  amellyel
amellyel
| (594) |

minden  jelre. Ezt a feltételt átírhatjuk
jelre. Ezt a feltételt átírhatjuk
| (595) |

alakba, ami azt sugallja, hogy lehetséges egy véges horizontú szabályozót definiálni, ami határesetben, ahogy a  tart végtelenhez, megközelíti a
tart végtelenhez, megközelíti a  szabályozót. Így, mint azt a
szabályozót. Így, mint azt a  esetben tettük, először célszerű a véges-horizontú FI feladatot megvizsgálni, ahol a költségfüggvény
esetben tettük, először célszerű a véges-horizontú FI feladatot megvizsgálni, ahol a költségfüggvény
| (596) |

alakú, ahol  es
es  .
.
Kimutatható, hogy ennek a feladatnak a megoldása egy  szabályozó, ami egy olyan
szabályozó, ami egy olyan  irányító bemenetet generál, amelyre létezik
irányító bemenetet generál, amelyre létezik  úgy, hogy
úgy, hogy
| (597) |

fennáljon minden  esetén, vagyis
esetén, vagyis  . Határesetben azt várjuk, hogy
. Határesetben azt várjuk, hogy
| (598) |

Azonban az optimális  feladattal szemben az optimális
feladattal szemben az optimális  irányítástervezésnek nem minig van megoldása, ha
irányítástervezésnek nem minig van megoldása, ha  túl kicsi, a zavaró
túl kicsi, a zavaró  tag jelenléte miatt a költségfüggvényben. Tekinthetjük úgy, hogy az optimalizálási feladat megoldása egy olyan játszma kimenetele, amelyben a szabályozó célja egy, a költséget minimalizáló
tag jelenléte miatt a költségfüggvényben. Tekinthetjük úgy, hogy az optimalizálási feladat megoldása egy olyan játszma kimenetele, amelyben a szabályozó célja egy, a költséget minimalizáló  irányító bemenet tervezése, míg a környezet egy olyan
irányító bemenet tervezése, míg a környezet egy olyan  zavarással hat ami maximalizálja ezt a költséget.
zavarással hat ami maximalizálja ezt a költséget.
Tehát a  költség függvénye
költség függvénye  -nak és
-nak és  -nek. Ha a zavarási stratégia adott akkor
-nek. Ha a zavarási stratégia adott akkor  egy konvex függvény aminek globális minimuma az
egy konvex függvény aminek globális minimuma az  irányításra vétetik fel, amit az optimális
irányításra vétetik fel, amit az optimális  szabályozó general. Ha az irányítás fix és a
szabályozó general. Ha az irányítás fix és a  környezeti hatás változik akkor a
környezeti hatás változik akkor a  egy konkáv funkcionál, aminek aminek globális maximuma
egy konkáv funkcionál, aminek aminek globális maximuma  esetén adódik.
esetén adódik.
A két játékos optimális stratégiája a nyeregpontban van, vagyis a költségfüggvény inflexiós pontjában, ahol a szabályozó a lehető legjobb irányítást alkalmazza a legrosszabb szavarás feltételezése mellett.
Legyen  ez a nyeregponti stratégia, amit az alábbi feltétel jellemez:
ez a nyeregponti stratégia, amit az alábbi feltétel jellemez:
| (599) |

Tehát a  optimális eljárás a legrosszabb esetre készül fel, ami egy konkrét zavarás esetén nem feltétlenül adja az arra a zavarásra optimális választ.
optimális eljárás a legrosszabb esetre készül fel, ami egy konkrét zavarás esetén nem feltétlenül adja az arra a zavarásra optimális választ.
13.1. Véges horizontú FI feladat
A véges horizontú FI feladat a
| (600) |

költségfüggvény  nyeregponti stratégiáját keresi, ahol a rendszer az alábbi formában adott:
nyeregponti stratégiáját keresi, ahol a rendszer az alábbi formában adott:
| (601) |
A továbbiakban feltételezzük, hogy létezik ilyen  nyeregpont.
nyeregpont.
Elöször rögzítsük  -t és tekintsük
-t és tekintsük  jelet, ahol
jelet, ahol  egy kis állandó. Jelölje
egy kis állandó. Jelölje  a nyeregponti trajektóriát, vagyis
a nyeregponti trajektóriát, vagyis
| (602) |

és legyen  az
az  által meghatározott trajektória, vagyis
által meghatározott trajektória, vagyis
| (603) |

Következik, hogy  ahol
ahol  kielégíti a
kielégíti a
| (604) |
egyenletet, azaz  ahol
ahol  az
az  -nak megfelelő alapmátrix.
-nak megfelelő alapmátrix.
Ekkor a perturbált költségfüggvény alakja


| (605) |

Mivel az első tag  és
és
| (606) |

következik, hogy

| (607) |

Elég kis  esetén a jobboldal negatív. Mivel
esetén a jobboldal negatív. Mivel  adódik, hogy
adódik, hogy
| (608) |

Bevezetve az alábbi társváltozót
| (609) |

minden  -ra, a következő feltétel adódik:
-ra, a következő feltétel adódik:
| (610) |
azaz a nyeregponti optimális irényítás
| (611) |
ahol  .
.
A fenti gondolatmenetet megismételhetjük, hogy a legrosszabb  zavarás egy jellemzését megkapjuk: rögzítsük
zavarás egy jellemzését megkapjuk: rögzítsük  -t és
-t és  ahol
ahol  . A perturbáló jel egy tetszőleges
. A perturbáló jel egy tetszőleges  -beli függvény és
-beli függvény és  egy tetszőleges állandó.
egy tetszőleges állandó.
Eza perturbáció egy  trajektórát generál, ahol
trajektórát generál, ahol  és
és  kielégíti az
kielégíti az
| (612) |
egyenletet, azaz  .
.
Ezt behelyettesítve  -be kapjuk, hogy
-be kapjuk, hogy
| (613) |

vagyis minden  esetén
esetén
| (614) |
A társváltozó segítségével a legrosszabb zavarás kifejezhető mint
| (615) |
ahol  .
.
Mint ahogyan az optimális LQ irányításnál már láttuk, az optimális állapot és társváltozó kielégíti az alábbi peremérték feladatot:
| (616) |

| (617) |
A
| (618) |
mátrix a rendszerhez rendelt Hamiltonian mátrix. A társváltozó kifejezhető mint
| (619) |
ahol  egy mátrixértékű függvény. Ekkor az optimális irányítás és a legrosszabb zavarás alakja
egy mátrixértékű függvény. Ekkor az optimális irányítás és a legrosszabb zavarás alakja
| (620) |

Várakozásunknak megfelelően  megoldása egy mátrix Riccati differenciál egyenletnek:
megoldása egy mátrix Riccati differenciál egyenletnek:
| (621) |

Ennek az  -nek a segítségével a költségfüggvény alakja
-nek a segítségével a költségfüggvény alakja








| (622) |

formában írható.
Bevezetve azt az  rendszert ami
rendszert ami  -t a
-t a  -be viszi, kapjuk, hogy
-be viszi, kapjuk, hogy
| (623) |
Ezzel következik, hogy

| (624) |

ahol  . Így az optimális
. Így az optimális  szabályozó kielégíti a
szabályozó kielégíti a
| (625) |

feltételt minden  esetén, azaz bisztosítja, hogy
esetén, azaz bisztosítja, hogy  .
.
13.2. Végtelen horizontú FI feladat
A  esetben már látott módon a végtelen horizontú optimális irányítás alakja
esetben már látott módon a végtelen horizontú optimális irányítás alakja
| (626) |
ahol  a
a
| (627) |


algebrai Riccati egyenlet pozitív definit megoldása amire  aszimptotikusan stabilis.
aszimptotikusan stabilis.
A  és
és  eset közötti különbség az algebrai Riccati egyenlet alakjában nyilvánul meg. Míg a
eset közötti különbség az algebrai Riccati egyenlet alakjában nyilvánul meg. Míg a  Riccati egyenletnek létezik stabilizáló megoldása, ha
Riccati egyenletnek létezik stabilizáló megoldása, ha
(a)  stablizálható,
stablizálható,
(b)  párnak nincsenek nem megfigyelhető módusai a képzetes tengelyen,
párnak nincsenek nem megfigyelhető módusai a képzetes tengelyen,
ez nem elégséges a  Riccati egyenletre. A továbbiakban feltesszük, hogy ezek a szükséges feltételek fennállnak és a
Riccati egyenletre. A továbbiakban feltesszük, hogy ezek a szükséges feltételek fennállnak és a
| (628) |

Riccati differenciál egyenletnek vannak  megoldásai minden
megoldásai minden  -re, ahol
-re, ahol  a
a  alakú
alakú
| (629) |

Riccati egyenlet megoldása.
Feltehetjük, hogy a véges horizontú feladatok költségfüggvényei
| (630) |

alakban írhatók, azaz  a terminális kültség.
a terminális kültség.
Legyen  egy tetszőleges nemzérus kezdeti érték és
egy tetszőleges nemzérus kezdeti érték és  tetszőleges
tetszőleges  -beli zavarás.Hogy kimutassuk
-beli zavarás.Hogy kimutassuk  egyenletes korlátosságát
egyenletes korlátosságát  -ben, meg kell mutatnunk, hogylétezik
-ben, meg kell mutatnunk, hogylétezik  amire
amire  minden
minden  esetén.
esetén.
A linearitást felhasználva  ahol
ahol  és
és  jelöli az
jelöli az  és
és  hatását
hatását  -re.Mivel a szabályozó stabilizálja a rendszert, létezik
-re.Mivel a szabályozó stabilizálja a rendszert, létezik  amire
amire  .Mivel a szabályozó garantálja, hogy
.Mivel a szabályozó garantálja, hogy  , létezik
, létezik  úgy, hogy
úgy, hogy  . Következik, hogy
. Következik, hogy


| (631) |

azaz,
| (632) |

minden  és minden
és minden  esetén.
esetén.
Mivel


| (633) |

ahol
| (634) |

minden  -re, következik, hogy
-re, következik, hogy
| (635) |

Mésrészt az optimális  szabályozót használva
szabályozót használva  esetén
esetén
| (636) |

Ezért
| (637) |

felhasználásával következik, hogy
| (638) |

minden  jelre.
jelre.
Ezen egyenlőtlenségek felhasználásával adódik, hogy
| (639) |

minden  -re. Tehát
-re. Tehát  egyenletesen korlátos
egyenletesen korlátos  -ben.
-ben.
Az időinvariancia miatt  , így létezik
, így létezik  , hogy
, hogy
| (640) |

amiből következik, hogy a differenciál Riccati egyenlet megoldásai egyenletesen korlátosak  -ben.
-ben.
A monotonitás kimutatásához tekintsük a Riccati egyenlet deriváltját
| (641) |

ami egy lineáris egyenlet, tehát
| (642) |

ahol az
az  alapmátrixa. A Riccati egyenletből következik, hogy
alapmátrixa. A Riccati egyenletből következik, hogy

| (643) |
vagyis,  egy minoton nem növekvő függvény
egy minoton nem növekvő függvény  -ben.
-ben.
Ahogyan a  esetben is, az időinvarianciát felhasználva
esetben is, az időinvarianciát felhasználva  , vagyis
, vagyis  egy monoton nem csökkenő függvénye
egy monoton nem csökkenő függvénye  -nek.
-nek.
Ugyan így,  , tehát határesetben
, tehát határesetben
| (644) |

ahol  egy konstans mátrix, amire
egy konstans mátrix, amire  , mivel
, mivel  minden
minden  esetén. Mivel a Riccati egyenlet megoldásai folytonosan függnek a peremfeltételektől
esetén. Mivel a Riccati egyenlet megoldásai folytonosan függnek a peremfeltételektől

| (645) |

Ezért  kielégíti a
kielégíti a  Riccati differencál egyenletet, ahol a peremfeltétel
Riccati differencál egyenletet, ahol a peremfeltétel  , azaz
, azaz
| (646) |

Kimutattuk tehát, hogy az algebrai Riccati egyenlet megoldásának létezése szükséges a feltétel a  FI szabnályozó létezéséhez, feltéve, hogy
FI szabnályozó létezéséhez, feltéve, hogy  stabilizálható,
stabilizálható,  párnak nincsenek nem-megfigyelhető módusai a képzetes tengelyen és a Riccati differenciál egyenleteknek van megoldása minden
párnak nincsenek nem-megfigyelhető módusai a képzetes tengelyen és a Riccati differenciál egyenleteknek van megoldása minden  -re. Kimutatható, hogy ez utóbbi feltátel nem szükséges és a
-re. Kimutatható, hogy ez utóbbi feltátel nem szükséges és a  algebrai Riccati egyenlet stabilizáló megoldásának létezése ekvivalens azzal, hogy a
algebrai Riccati egyenlet stabilizáló megoldásának létezése ekvivalens azzal, hogy a  Hamiltonian mátrixnak nincsenek sajátértékei a képzetes tengelyen.
Hamiltonian mátrixnak nincsenek sajátértékei a képzetes tengelyen.
A továbbiakban az eljárás követi a  esetben már látottakat: alkalmazva az
esetben már látottakat: alkalmazva az  visszacsatolást, a zárt kör
visszacsatolást, a zárt kör
| (647) |

| (648) |
Ki kell mutatni, hogy ez a rendszer stabil. A Riccati egyenletből kapjuk, hogy

| (649) |

Mivel  , a
, a  minden instabik módusa nem megfigyelhető
minden instabik módusa nem megfigyelhető  -re. Legyen
-re. Legyen  az
az  egy instabil módusa,
egy instabil módusa,
| (650) |

Következik, hogy
| (651) |

azaz,  az
az  -nak is egy módusa. De ez a mátrix stabilis, így
-nak is egy módusa. De ez a mátrix stabilis, így  összes módusa stabil és megfigyelhető.
összes módusa stabil és megfigyelhető.
Mivel  asszimptotikusan stabilis, a KYP lemmából következik, hogy lemma that
asszimptotikusan stabilis, a KYP lemmából következik, hogy lemma that  if and only létezik
if and only létezik  ami kielégíti az alábbi algebrai Riccati egyenletet:
ami kielégíti az alábbi algebrai Riccati egyenletet:
| (652) |

ahol  asszimptotikusan stabilis.Nyílvánvaló, hogy
asszimptotikusan stabilis.Nyílvánvaló, hogy  egy megoldás, így
egy megoldás, így  .
.
13.3. A  OE feladat
OE feladat
Az FI feladat megoldását felhasználhatjuk az OE szűrési feladat megoldásának előállítására. A  esetben felírt Kalman szűrővel analó módon képzelhetjük el a
esetben felírt Kalman szűrővel analó módon képzelhetjük el a  szűrőt: míg a Kalman szűrő az állapotbcslést négyzetes középben minimalizállja a Gauss eloszlású bemenetekre nézve, a
szűrőt: míg a Kalman szűrő az állapotbcslést négyzetes középben minimalizállja a Gauss eloszlású bemenetekre nézve, a  szűrő a becslési hiba erősítését egy
szűrő a becslési hiba erősítését egy  szintnél kisebbre garantálja minden lehetséges korlátos energiájú bemenet esetén.
szintnél kisebbre garantálja minden lehetséges korlátos energiájú bemenet esetén.
A  feladatnál már látott módon az OE rendszer alakja
feladatnál már látott módon az OE rendszer alakja
| (653) |
ahol stabilis. Ekkor
stabilis. Ekkor  ha
ha
| (654) |
ahol  és
és  kielégíti az alábbi algebraic Riccati egyenletet
kielégíti az alábbi algebraic Riccati egyenletet
| (655) |

13.4. Egyszerűsített kimenet visszacsatolásos feladat
Lemma 12.1 Egy  rendszer esetén, ahol
rendszer esetén, ahol 
| (656) |
akkor és csak akkor, ha  ahol
ahol  .
.
Bizonyítás 12.1 Az  irányítással, ahol
irányítással, ahol  kielégíti a
kielégíti a  FI feladat algebrai Riccati egyenletét,
FI feladat algebrai Riccati egyenletét,  , ahol
, ahol  a
a  -ről
-ről  -re vett átviteli függvény.
-re vett átviteli függvény.
A véges horizontú feladatra
| (657) |

és
| (658) |

Legyen  a
a  jelet
jelet  -re képző rendszer:
-re képző rendszer:
| (659) |
Ha  , akkor létezik
, akkor létezik  , hogy
, hogy


| (660) |

azaz,  .
.
Fordítva, ha  , akkor
, akkor

| (661) |

amiből következik, hogy  .
.
Ebből az eredményből kiindulva írjul át az eredeti  rendszert a
rendszert a  esethez hasonlóan két rendszer,
esethez hasonlóan két rendszer,  és
és  , Redheffer szorzataként:
, Redheffer szorzataként:
| (662) |
| (663) |
ahol
| (664) |

Mivel  és a
és a  által generált jel
által generált jel  , következik, hogy
, következik, hogy
| (665) |

ami a  határesetben is igaz marad.
határesetben is igaz marad.

egy OE típusú feladatot határoz meg a hozzá tartozó
| (666) |
szabáltozóval, ahol  és ahol
és ahol  és
és  kielégíti az
kielégíti az
| (667) |

algebrai Riccati egyenletet.
Figyeljük meg, hogy a  esettel ellentétben a
esettel ellentétben a  probléma két algebrai Riccati egyenlete nem független egymástól:
probléma két algebrai Riccati egyenlete nem független egymástól:  -ben az
-ben az  mátrix az FI Riccati egyenlet megoldása.
mátrix az FI Riccati egyenlet megoldása.
Ha megköveteljük azonban, hogy  , vagyis
, vagyis  invertálható, akkor az
invertálható, akkor az
| (668) |

transzformáció invertálható és  akkor és csak akkor elégíti ki az OF Riccati egyenletet ha
akkor és csak akkor elégíti ki az OF Riccati egyenletet ha  megoldása az
megoldása az
| (669) |

OE algebrai Riccati egyenletnek.
Összegzésként az egyszerüsített kimenet visszacsatolásos feladat megoldását az alábbi algoritmus írja le:
Tétel 12.1 Az egyszerüsített OF feladat megoldása
| (670) |
ahol
| (671) |

| (672) |

| (673) |

| (674) |

| (675) |

14. fejezet - Rekonfiguráló és hibatűrő irányítások tervezése
- 14.1. Robusztus stabilitás, robusztus performancia
- 14.2. Robusztus stabilitás vizsgálat
- 14.3. Kis erősítések tétele
- 14.4. Robusztus performancia analízis
- 14.5. Struktúrált bizonytalanság
- 14.6. Struktúrált szinguláris érték
- 14.7. Struktúrált szinguláris érték: analízis
- 14.8. Struktúrált szinguláris érték: szintézis
14.1. Robusztus stabilitás, robusztus performancia
Mivel a rendszerre ható külső körülmények változhatnak, valamint az érzékelők és beavatkozó szervek tulajdonságai is módosulhatnak, kisebb hibák léphetnek fel, stb. szükség van rekonfiguráló és hibatűrő irányítások tervezése. Ezen a tulajdonságok az elérésének egy módja lehet növelni a szabályozó robusztusságát ezekre a tényezőkre és a modellezési hibákra. Az alábbiakban a feladat megoldásának ezt a stratégiáját fejtjük ki részletesebben.
A szabályozási feladatot az 57 ábrán bemutatott  struktúrában fogalmazzuk meg amit az alábbi egyenletek írnak le
struktúrában fogalmazzuk meg amit az alábbi egyenletek írnak le
| (676) |
ahol  jelek a bizonytalanságok leírására szolgálnak,
jelek a bizonytalanságok leírására szolgálnak,  az általánosított rendszerstruktúra zavarás és performancia jelei,
az általánosított rendszerstruktúra zavarás és performancia jelei,  a szabályozó bemenet és a mért kimenet.
a szabályozó bemenet és a mért kimenet.
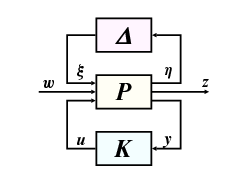
A bizonytalansági halmaz,  , stabil átmenetfüggvényekből áll. A perturbált kör a
, stabil átmenetfüggvényekből áll. A perturbált kör a
| (677) |

bizonytalanság hatására lakul ki, ahol  és alakja a következő:
és alakja a következő:
| (678) |
| (679) |

Az  szabályozót a nominális (perturbálatlan) rendszerre kötve kapjuk, hogy
szabályozót a nominális (perturbálatlan) rendszerre kötve kapjuk, hogy
| (680) |
| (681) |

A szabályozott,  , és perturbált,
, és perturbált,  , kör alakja
, kör alakja
| (682) |

Mivel a zárt körök jól definiáltak kell, hogy legyenek és nem függhetnek  és
és  sorrendjétől, néhány feltételezéssel kell élnünk:
sorrendjétől, néhány feltételezéssel kell élnünk:
(a) Létezik  szabályozó, ami stabilizálja a nominális (
szabályozó, ami stabilizálja a nominális ( ) rendszert (
) rendszert ( ).
).
(b) A bizonytalansági halmaz
| (683) |

ahol  komplex mátrixok egy halmaza, ami tartalmazza
komplex mátrixok egy halmaza, ami tartalmazza  -t, ami meghatározza a bizonytalanságok méretét és struktúráját.Feltesszük, hogy ez a halmaz csillag alakú, vagyis
-t, ami meghatározza a bizonytalanságok méretét és struktúráját.Feltesszük, hogy ez a halmaz csillag alakú, vagyis  minden
minden  esetén.
esetén.
(c) A bizonytalanságok és az általánosított rendszerstruktúra kötése jól definiált, vagyis  invertálható minden
invertálható minden  esetén.
esetén.
Ezek a feltételek jórészt automatikusan teljesülnek a szokásos, intervallum, gömb, stb. típusú bizonytalansági halmazokra.
Általában normalizáló súlyozásokat alkalmazunk, amit azután figyelembe veszünk  összeállításánál: ha
összeállításánál: ha  bizonytalansággal akarunk dolgozni, ahol
bizonytalansággal akarunk dolgozni, ahol  valós racionális
valós racionális  és
és  súlyokkal, akkor
súlyokkal, akkor  helyett
helyett  rendszert kell tekintenünk, ahol
rendszert kell tekintenünk, ahol
| (684) |
14.2. Robusztus stabilitás vizsgálat
Vezessük be a
| (685) |
jelölést, ahol  a bizonytalanság által látott átviteli függvény.
a bizonytalanság által látott átviteli függvény.
Tétel 13.1 Ha  stabilizálja
stabilizálja  -t és ha
-t és ha  minden
minden  esetén stabilan invertálható akkor
esetén stabilan invertálható akkor  robusztusan stabilizálja
robusztusan stabilizálja  -t a
-t a  bizonytalanságra nézve.
bizonytalanságra nézve.
Bizonyítás 13.1 Ki kell mutatnunk, hogy
| (686) |
| (687) |

egy stabil rendszer.
Mivel  stabilizálja
stabilizálja  -t, ez a rendszer írható mint
-t, ez a rendszer írható mint
| (688) |
ahol minen blokk stabil.
Következik, hogy
| (689) |

Mivel mind  mind pedig
mind pedig  stabil ez egy stabil átviteli függvényt határoz meg.
stabil ez egy stabil átviteli függvényt határoz meg.
A bizonyításból következik, hogy azt kell leelenőrizni, hogy  stabilisan invertálható, vagyis
stabilisan invertálható, vagyis  minden
minden  esetén. Ez a feladat bonyolult, mivel az egész jobb fél síkon kell a feltételt ellenőrizni.
esetén. Ez a feladat bonyolult, mivel az egész jobb fél síkon kell a feltételt ellenőrizni.
A következő állítás megmutatja, hogy általában elég  invertálhatóságát a komplex tengelyen (
invertálhatóságát a komplex tengelyen ( , ahol
, ahol  ) ellenőrizni és elegendő csak a
) ellenőrizni és elegendő csak a  halmazra.
halmazra.
Tétel 13.2 Tegyük fel, hogy  egy stabil átviteli mátrix.
egy stabil átviteli mátrix.
Ha  minden
minden  esetén, akkor
esetén, akkor  stabilisan invertálható minden
stabilisan invertálható minden  esetén.
esetén.
Bizonyítás 13.2 A bizonyítás ellentmondásra való visszavezetéssel történik: tegyük fel, hogy létezik  amire
amire  -nek
-nek  egy zárusa
egy zárusa  -ban, ahol
-ban, ahol  nincs benne
nincs benne  -ben.
-ben.
Ha kimutatjuk, hogy létezik  és
és amire
amire
| (690) |

akkor ellentmondásra jutunk, mert  és
és  .
.
Ehhez tekintsük az
| (691) |
átviteli mátrixot, azaz
| (692) |
Bevezetve a  jelölést a Schur formulából
jelölést a Schur formulából
| (693) |

adódik.  és
és  esetén következik, hogy
esetén következik, hogy  minden
minden  -ra.Mivel
-ra.Mivel  stabilis
stabilis  , így
, így  vagy
vagy  .
.
Mivel  folytonosan függ
folytonosan függ  -tól, létezik egy folytonos komplex értékű
-tól, létezik egy folytonos komplex értékű  függvény
függvény  -en úgy, hogy
-en úgy, hogy  minden
minden  -ra.
-ra.

stabilis, így  benne van
benne van  -ban. Így a folytonos
-ban. Így a folytonos  függvény teljesíti
függvény teljesíti  és
és  . Ezért léteznie kell egy
. Ezért léteznie kell egy  értéknek amire
értéknek amire  . Ekkor
. Ekkor  és
és  miatt
miatt
| (694) |

ami a keresett ellentmondás.
A fenti két állítást összegezve kapjuk a következő robusztus stabilitási eredményt:
Következmény 13.1 Ha  stabilizálja
stabilizálja  -t és
-t és  minden
minden  és minden
és minden  esetén, akkor
esetén, akkor  robusztusan stabilizálja
robusztusan stabilizálja  -t a
-t a  bizonytalansági halmazra nézve.
bizonytalansági halmazra nézve.
A fordított állítás általában nem igaz. Egy konkrét esetben a teszt nem konzervatív voltát megpróbálhatjuk úgy igazolni, hogy egy destabilizáló  perturbációt keresünk.
perturbációt keresünk.
14.3. Kis erősítések tétele
A robusztus stabilitási analízis egy alapvető eszköze a kis erősítések tétele, ami kimondja, hogy ha a hurokátviteli szorzat normája egynél kisebb, akkor a visszacsatolás stabilis. Ez az eredmény a fixpont tétel egy következménye.
Egy  rendszert, ahol
rendszert, ahol  egy Banach tér (például
egy Banach tér (például  vagy
vagy  )) kontraktív, ha a (Lipschitz) indukált normája
)) kontraktív, ha a (Lipschitz) indukált normája  -nél kisebb, azaz létezik
-nél kisebb, azaz létezik  úgy, hogy
úgy, hogy
| (695) |

minden  esetén. A fixpont tétel alapján egy kontraktív
esetén. A fixpont tétel alapján egy kontraktív  rendszerhez létezik és egyértelmű
rendszerhez létezik és egyértelmű  amire
amire  .
.
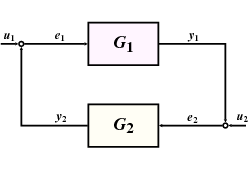
Tétel 13.3 (Kis erősítések tétele) Tegyük fel, hogy a  valamint a
valamint a  rendszereknek véges erősítése van, amire
rendszereknek véges erősítése van, amire  .
.
Ekkor a visszacsatolt kapcsolat stabilis, azaz minden  esetén létezik es egyértelmű
esetén létezik es egyértelmű  , lásd a 58 ábrát.
, lásd a 58 ábrát.
Bizonyítás 13.3 Legyen  es
es , definiáljuk az
, definiáljuk az  rendszert mint
rendszert mint
| (696) |

Mivel

| (697) |

és  következik, hogy
következik, hogy  kontraktív
kontraktív  -on. Így létezik és egyértelmű
-on. Így létezik és egyértelmű  úgy, hogy
úgy, hogy  minden
minden  -re, azaz
-re, azaz
| (698) |

Mivel a  rendszerek kauzálisak, következik, hogy
rendszerek kauzálisak, következik, hogy
| (699) |

ahol  kielégíti a visszacsatolási egyenleteket.Mivel
kielégíti a visszacsatolási egyenleteket.Mivel  tetszőleges, minden
tetszőleges, minden  és
és  , esetén létezik és egyértelmű
, esetén létezik és egyértelmű  .Hasonló gondolatmenettel adódik
.Hasonló gondolatmenettel adódik  létezése.
létezése.
A gyakorlatban sokszor az eredeti visszacsatolás nem teljesíti a tétel feltételeit. Ilyenkor a zárt kör stabilitását megkaphatjuk a kis erősítések tételének alkalmazásával egy módosított elrendezésre, aminek a stabilitási tulajdonságai viszont azonosak az eredeti rendszerével.
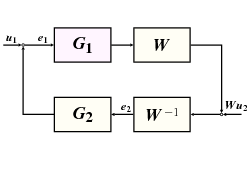
A leggyakrabban alkalmazott transzformáció stabilan invertálható súlyfüggvényeket alkalmazva módosítja a kapcsolást az 59 ábrán látható módon.
Következmény 13.2 Legyen  stabil rendszer.Ekkor a visszacsatolt rendszer stabilis ha létezik egy
stabil rendszer.Ekkor a visszacsatolt rendszer stabilis ha létezik egy  ,
,  stabilis rendszer úgy, hogy
stabilis rendszer úgy, hogy  .
.
14.4. Robusztus performancia analízis
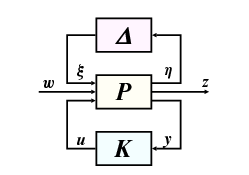
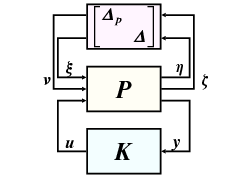
Definiáljuk a
| (700) |
halmazt. A kis erősítések tételét alkalmazva megkaphatjuk a  -ra vonatkozó robusztus performancia eredményt:
-ra vonatkozó robusztus performancia eredményt:
-  invertálható és
invertálható és  minden
minden  esetén,
esetén,
akkor és csak akkor ha a robusztus stabilitási feltétel minden  -ra fennáll, ahol
-ra fennáll, ahol  és
és  , lásd az 59 ábrát, azaz
, lásd az 59 ábrát, azaz
-  invertálható minden
invertálható minden  esetén,
esetén,
ahol  .
.
Megvizsgálva, hogy
| (701) |

adódik, hogy
| (702) |


invertálható ha  invertálható.Feltevéseink szerint
invertálható.Feltevéseink szerint  .
.
válasszuk  -t. Ekkor
-t. Ekkor
| (703) |
invertálható, tehát  invertálható minden
invertálható minden  esetén.
esetén.
Mivel  invertálható, a kis erősítések tételéből következik, hogy
invertálható, a kis erősítések tételéből következik, hogy  minden
minden  esetén.
esetén.
Összefoglalva: a robusztus performancia ekvivalens egy robusztus stabilitási feladattal, ami egy nomináis  zárt körre és struktúrált bizonytalanságra vonatkozik, lásd a 61, ábrát. Mivel a bizonytalansági halmaz struktúrált, a kis erősítések tételénél kevésbé konzervatív eredmények keresése válik szükségessé.
zárt körre és struktúrált bizonytalanságra vonatkozik, lásd a 61, ábrát. Mivel a bizonytalansági halmaz struktúrált, a kis erősítések tételénél kevésbé konzervatív eredmények keresése válik szükségessé.
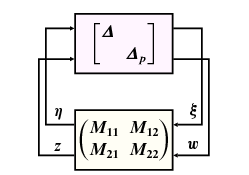
14.5. Struktúrált bizonytalanság
A bizonytalan rendszereket egy nominális LTI rendszer és egy visszacsatolt bizonytalan blokk együttesével modellezzük, ahol először a  bizonytalansági halmazra az operátor egységgömböt választottuk. Ez az eset jól kezelhető a kis erősítések tételével. A továbbiakban ezt a technikát terjesztjük ki más szerkezetű bizonytalansági halmazok esetére.
bizonytalansági halmazra az operátor egységgömböt választottuk. Ez az eset jól kezelhető a kis erősítések tételével. A továbbiakban ezt a technikát terjesztjük ki más szerkezetű bizonytalansági halmazok esetére.
Példa 13.1
Tekintsük az alábbi bizonytalansági blokkot
| (704) |
ahol a normalizáló súly  (
( ). Ekkor a kis erősítések tételének feltételeit kielégiti
). Ekkor a kis erősítések tételének feltételeit kielégiti  vagy
vagy  is. Ezért ebben az esetben a kis erősítések tétele igen konzervatív stabilitási eredményre vezet.
is. Ezért ebben az esetben a kis erősítések tétele igen konzervatív stabilitási eredményre vezet.
Egy igen fontos struktúrált bizonytalansági osztály a blokk diagonális bizonytalanságok halmaza.
Példa 13.2
Tekintsünk egy egy bemenetű és két kimenettel rendelkező  rendszert, ahol
rendszert, ahol
| (705) |

és  valamint
valamint  bizonytalanságát
bizonytalanságát
| (706) |

| (707) |

írja le, vagyis

| (708) |
Ebben az esetben is a bizonytalanságot egy struktúrált, blokk diagonális
| (709) |
halmaz, ami csak egy részhalmaza a strukturálatlan, normakorlátos halmaznak.
Blokk diagonális bizonytalansági struktúrák létrehozásának egyik módja az egyes  bizonytalanságok kiemelése a rendszerből és az így kapott összekötés LFT alakra való hozása.
bizonytalanságok kiemelése a rendszerből és az így kapott összekötés LFT alakra való hozása.
A továbbiakban azt az elvet illusztráljuk egy néhány konkrét példán keresztül.
Példa 13.3
Input-output multiplikatív bizonytalanság:
| (710) |
| (711) |
A  kiemelésének menete:
kiemelésének menete:
-  elkülönítése:
elkülönítése:
| (712) |

| (713) |

-  elkülönítése:
elkülönítése:
| (714) |

| (715) |

Példa 13.4
Faktorizált bizonytalanság ( invertálható):
invertálható):
| (716) |

| (717) |

Az alábbi relációk
| (718) |

felírhatók mint
| (719) |

amiből  -t eliminálva és figyelembe véve, hogy
-t eliminálva és figyelembe véve, hogy  adódik
adódik
| (720) |

Parametrikus bizonytalanságokra tekintsük az alábbi példákat:
Példa 13.5
Tekintsük a rugózott tömeg moddeljét:  .
.
| (721) |
A bizonytalan rugóállandó  (additív bizonytalansági modell).
(additív bizonytalansági modell).
Ekkor az állapotegyenletek
| (722) |

| (723) |
| (724) |

| (725) |

| (726) |

Példa 13.6
Tekintsük az 13.6 ábrán látható tömeg-csillapító-rugó rendszert ( tömeg,
tömeg,  csillapítási együttható,
csillapítási együttható,  rugóállandó).
rugóállandó).
Differenciálegyenlete:
| (727) |
ahol  a tömeg elmozdulása,
a tömeg elmozdulása,  erő a rendszer gerjesztése.
erő a rendszer gerjesztése.
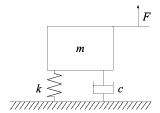
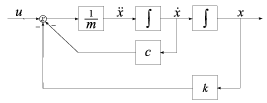
A blokkdiagram a rendszer névleges modelljét illusztrálja. A valós rendszerben a fizikai paraméterek egyrészt nem ismertek pontosan, másrészt üzem közben változnak. Ismerjük viszont ezek átlagos értékét és becslésünk van az átlagos értéktől való eltérésükre.
| (728) |
| (729) |
| (730) |
A példában legyenek  ,
,  ,
,  a névleges értékek,
a névleges értékek,  ,
,  ,
,  és
és  reprezentálja, hogy a rendszer modellje, csillapítása és rugóállandója rendre
reprezentálja, hogy a rendszer modellje, csillapítása és rugóállandója rendre  ,
,  ,
,  bizonytalanságú.
bizonytalanságú.
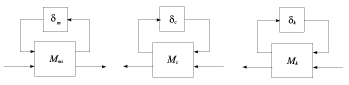
A parametrikus bizonytalanságok a következőképpen írhatók fel:
| (731) |

| (732) |

| (733) |

ahol  ,
,  ,
, Megjegyzés: A kapcsolatokat felső bizonytalanság blokkal vettük figyelembe. A rendszer jelei közötti összefüggések ezek szerint a következőképpen alakulnak:
Megjegyzés: A kapcsolatokat felső bizonytalanság blokkal vettük figyelembe. A rendszer jelei közötti összefüggések ezek szerint a következőképpen alakulnak:
| (734) |
ahol
| (735) |
| (736) |
| (737) |

| (738) |

| (739) |

továbbá  és
és  .
.
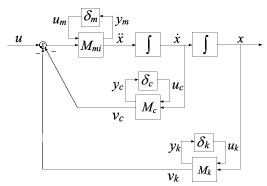
Válasszuk az állapotokat a következőképpen:  ,
,  ,
,  , azaz
, azaz  .
.
| (740) |

| (741) |
| (742) |

Ezek után felírhatjuk a parametrikus bizonytalanságokat tartalmazó rendszer modelljét:
| (743) |
A lengőrendszer modellje  kizárólag az ismert
kizárólag az ismert  ,
,  ,
,  névleges paraméterektől és az ismert
névleges paraméterektől és az ismert  ,
,  ,
,  bizonytalnsági felső becslésektől függ. Így
bizonytalnsági felső becslésektől függ. Így  ismert és nem tartalmaz bizonytalanságokat.
ismert és nem tartalmaz bizonytalanságokat.
| (744) |
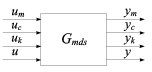
ahol  ,
,  ,
,  ,
,
,  ,
,  ,
,

,  ,
,  .
.
A bizonytalanságokat tartalmazó  paramétereket egy külön blokk tartalmazza.
paramétereket egy külön blokk tartalmazza.
| (745) |
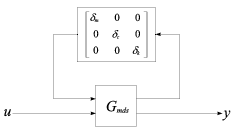
A bizonytalan paraméterek hatása a 13.6. ábrán látható Bode diagramokon jól láthatók.
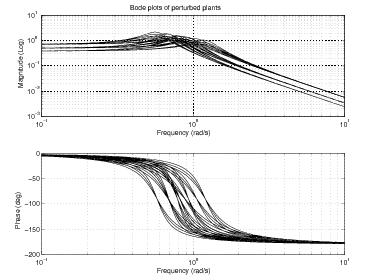
A modellezés célja, hogy megkapjuk az általánosított rendszer struktúrát, ahol az összes súlyfüggvény a  általánosított rendszerbe van beillesztve, míg a bizonytalanságokat a blokk-diagonális
általánosított rendszerbe van beillesztve, míg a bizonytalanságokat a blokk-diagonális  tartalmazza, ami egy
tartalmazza, ami egy  halmaz eleme, ahol:
halmaz eleme, ahol:
| (746) |

és ahol minden bokk normalizált.
14.6. Struktúrált szinguláris érték
Az  mátrixok esetén a
mátrixok esetén a  struktúrált szinguláris érték definíciójában figyelembe veszünk egy feladatfüggő
struktúrált szinguláris érték definíciójában figyelembe veszünk egy feladatfüggő  bizonytalansági struktúrát, ami az adott probléma sajátosságaitól és performancia követelményeitől függ. A vizsgált struktúrák az egységgömb megszorítását jelentik valamely
bizonytalansági struktúrát, ami az adott probléma sajátosságaitól és performancia követelményeitől függ. A vizsgált struktúrák az egységgömb megszorítását jelentik valamely  tulajdonságok mentén, amikre feltesszük, hogy ha
tulajdonságok mentén, amikre feltesszük, hogy ha  -ra teljesül
-ra teljesül  , akkor
, akkor  -ra is teljesülni fog minden
-ra is teljesülni fog minden  esetén, azaz
esetén, azaz  csillag szerkezetű (kúp).
csillag szerkezetű (kúp).
Tipikus példa a  tulajdonságra a blokk-diagonális struktúra: aminek két típusát tekintjük -- ismédlődő skalár és teljes blokkú, vagyis
tulajdonságra a blokk-diagonális struktúra: aminek két típusát tekintjük -- ismédlődő skalár és teljes blokkú, vagyis
| (747) |

| (748) |

ahol a nemnegatív  és
és  egészek az ismétlődő skalár blokkok számát illetve a teljes blokkok számát jelentik.
egészek az ismétlődő skalár blokkok számát illetve a teljes blokkok számát jelentik.
Értelemszerűen fenn kell állnia az  összefüggésnek. Az egyszerűség kedvéért a jelölésből elhagyjuk
összefüggésnek. Az egyszerűség kedvéért a jelölésből elhagyjuk  -t.
-t.
Gyakran normakorlátos  halmazzal van dolgunk
halmazzal van dolgunk
| (749) |

Definíció 13.1 Az  LTI operátorhoz rendelt és a
LTI operátorhoz rendelt és a  halmazra vonatkoztatott
halmazra vonatkoztatott  struktúrált szinguláris érték
struktúrált szinguláris érték  ahol
ahol

| (750) |

A definíció jelentése a  visszacsatolt kör esetén kézenfekvő:
visszacsatolt kör esetén kézenfekvő:  annak a struktúrált
annak a struktúrált  bizonytalanságnak a normája ami destabilizálja a zárt kört.
bizonytalanságnak a normája ami destabilizálja a zárt kört.
A definíció egyenes következménye, hogy minden  és
és  esetén
esetén  valamint
valamint  .Azonban, ha a blokkstruktúra nem triviális akkor
.Azonban, ha a blokkstruktúra nem triviális akkor  nem normája
nem normája  -nek, mivel a háromszög egyenlőtlenség nem teljesül.
-nek, mivel a háromszög egyenlőtlenség nem teljesül.
Lemma 13.1
| (751) |
Bizonyítás 13.4 Minden  esetén
esetén  , így csak két esetet kell vizsgálnunk:
, így csak két esetet kell vizsgálnunk:  akkor és csak akkor, ha
akkor és csak akkor, ha  valamint
valamint  akkor és csak akkor, ha
akkor és csak akkor, ha  . Ezek az esetek a definíció egyszerű következményei.
. Ezek az esetek a definíció egyszerű következményei.
A lemmából, a spektrálsugár és a  függvények folytonosságából valamint
függvények folytonosságából valamint  kompaktságából következik, hogy a
kompaktságából következik, hogy a  függvény folytonos.
függvény folytonos.
Általában nem könnyű a  értékét kiszámítani. A továbbiakban a
értékét kiszámítani. A továbbiakban a  függvény néhány olyan tulajdonságát soroljuk fel, amit haszonnal lehet a számításokban és becslésekben felhasználni.
függvény néhány olyan tulajdonságát soroljuk fel, amit haszonnal lehet a számításokban és becslésekben felhasználni.
- ha  , általában
, általában  .
.
- ha  akkor
akkor  .
.
-  . (
. ( az
az  spektrál sugara)
spektrál sugara)
Valóban, ha  akkor
akkor  és
és  esetén
esetén  , míg tetszőleges
, míg tetszőleges  esetén
esetén  .
.
Sajnos ezek a becslések általában nagyon durvák,mivel  valamint
valamint  közti különbség tetszőlegesen nagy lehet.A becsléseket szűkíteni lehet
közti különbség tetszőlegesen nagy lehet.A becsléseket szűkíteni lehet  olyan transzformációinak a felhasználásával amik nem befolyásolják
olyan transzformációinak a felhasználásával amik nem befolyásolják  értékét, azonban hatással vannak
értékét, azonban hatással vannak  és
és  értékére.
értékére.
-  ahol
ahol
| (752) |


| (753) |

Valóban: mivel  ahol
ahol  adódik, hogy
adódik, hogy  minden
minden  -ra. Másrészt
-ra. Másrészt  ha
ha  így
így  .
.
Ezért  , vagyis
, vagyis  invariáns a diagonális skálázásra.
invariáns a diagonális skálázásra.
-  esetén a
esetén a
| (754) |
halmaz konvex.
Valóban:

| (755) |

Az utolsó feltétel egy lineáris mátrixegyenlőtlenség (LMI), ami egy konvex feltétel  -ben.
-ben.
- azon  struktúrák esetén, amikre
struktúrák esetén, amikre  :
:  .
.
Ha  akkor az egyenlőség általában nem teljesül.
akkor az egyenlőség általában nem teljesül.
A leírtakat az alábbi példa szemlélteti: legyen  és tekintsünk egy
és tekintsünk egy
| (756) |
bizonytalansági halmazt. Mivel  és
és  akkor
akkor  valamint
valamint  .
.
Mivel  és
és  :
:
| (757) |

Így  . Másrészt:
. Másrészt:
| (758) |

ezért
| (759) |

| (760) |

ami ebben a speciális esetben igazolja az állítás helyességét.
Eddig komplex skaláris blokkokat tekintettünk. Azonban a parametrikus bizonytalanságok tipikusan valós értékűek, amit figyelembe kell vennünk:
| (761) |

Ez a struktúra elvezet a kevert (valós/komplex)  fogalmához. Ekkor a
fogalmához. Ekkor a  skálázás alkalmazása helyett felső becslést kaphatunk a kevert
skálázás alkalmazása helyett felső becslést kaphatunk a kevert  -re, ha az úgynevezett
-re, ha az úgynevezett  skálázást használjuk:
skálázást használjuk:
-
| (762) |

ahol

| (763) |

| (764) |

és  .
.
Ez általában egy kvázi-konvex problémára vezet. Ha  egy-rangú mátrix, akkor
egy-rangú mátrix, akkor  megegyezik a felső becslésével.
megegyezik a felső becslésével.
14.7. Struktúrált szinguláris érték: analízis
A következő állítás alapvető szerepet játszik a  alapú robusztussági analízisben. Tekintsük a
alapú robusztussági analízisben. Tekintsük a  és
és  bizonytalanságokat valamint a következő blokk-diagonális
bizonytalanságokat valamint a következő blokk-diagonális  struktúrát:
struktúrát:
| (765) |
Tétel 13.4 (Fő hurok tétel)
| (766) |
Bizonyítás 13.5 Mivel
| (767) |


-ből következik, hogy  . Ezért
. Ezért
| (768) |

| (769) |

azonosságból következik, hogy
| (770) |


definícióját felhasználva a bal oldal akkor és csak akkor nem zérus  esetén, ha
esetén, ha  .Hasonlóan a jobb oldal akkor és csak akkor nem tűnik el, ha
.Hasonlóan a jobb oldal akkor és csak akkor nem tűnik el, ha  és
és  minden
minden  -ra.
-ra.
Tekintsünk most egy általánosított  rendszerstruktúrát és egy stabilizáló
rendszerstruktúrát és egy stabilizáló  szabályozót, azaz
szabályozót, azaz
| (771) |
és  ahol
ahol  stabil bizonytalanság, amire
stabil bizonytalanság, amire  minden
minden  esetén.
esetén.
Ekkor a  robusztusan stabilizál, ha
robusztusan stabilizál, ha
| (772) |
minden  esetén.
esetén.
A  szabályozó teljesíti a nominális performancia kritériumot,ha
szabályozó teljesíti a nominális performancia kritériumot,ha
| (773) |

minden  esetén.
esetén.
A Fő hurok tétel alapján a performancia robusztus, ha
| (774) |
minden  esetén, ahol
esetén, ahol  .
.
14.8. Struktúrált szinguláris érték: szintézis
Az analízis feltételek fényében egy robusztus stabilitást és performanciát garantáló szabályozó tervezéséhez minimalizálni kell egy struktúrált szinguláris értéket egy adott struktúrált bizonytalansági halmazon és minden frekvencián. Ez egy nemkonvex nemlineáris feladat, amire még nem született minden igényt kielégítő megoldó algoritmus. Egy, a gyakorlatban számos feladat esetében hatékonynak bizonyult heurisztikus algoritmus az úgynevezett  -iteráció (vagy
-iteráció (vagy  iteráció, valós bizonytalanságok kezelése esetén).
iteráció, valós bizonytalanságok kezelése esetén).
Tekintsük az alábbi bizonytalansági struktúrát:
| (775) |

| (776) |

A  -nek megfelelő
-nek megfelelő  skálázó mátrixok halmaza
skálázó mátrixok halmaza

| (777) |

Ekkor a  -hoz rendelt skálázó mátrixok halmaza
-hoz rendelt skálázó mátrixok halmaza
Ezekkel a skálázó szűrőkkel
| (778) |

így minden stabilizáló szabályozóra, ami teljesíti a
| (779) |

feltételt minden  esetén, garantált a robusztus performancia. Ezért a
esetén, garantált a robusztus performancia. Ezért a  -t direktbe optimalizáló szabályozó tervezése helyett a felső becslést minimalizáljuk a
-t direktbe optimalizáló szabályozó tervezése helyett a felső becslést minimalizáljuk a  segítségével.
segítségével.
Ezt a feladatot az alábbi kritérium fogalmazza meg: minimizáljuk
| (780) |

minden  -t stabilizáló
-t stabilizáló  szabályozóra, és minden frekvencián a
szabályozóra, és minden frekvencián a  -beli
-beli  skálázó mátrixokra. Ha ez a minimum kisebb mint egy, akkor a tervezés sikeres.
skálázó mátrixokra. Ha ez a minimum kisebb mint egy, akkor a tervezés sikeres.
14.8.1. A  iteráció
iteráció
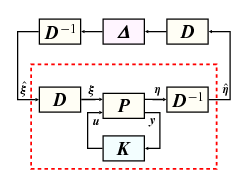
Sajnos az (780) feladatban nem tudunk egyszerre minimalizálni a  szabályozó és frekvenciafüggő
szabályozó és frekvenciafüggő  skálázó mátrixok függvényében. Ezért egy iterációt alkalmazunk: fixen tartjuk a
skálázó mátrixok függvényében. Ezért egy iterációt alkalmazunk: fixen tartjuk a  skálát és (780) minimumát keressük a stabilizáló szabályozók halmazán. A második lépésben a
skálát és (780) minimumát keressük a stabilizáló szabályozók halmazán. A második lépésben a  szabályozót tratjuk fixen és (780) minimumát keressük a
szabályozót tratjuk fixen és (780) minimumát keressük a  skálák függvényében. Ezt az eljárást nevezzük
skálák függvényében. Ezt az eljárást nevezzük  -iterációnak, lásd még az 68 ábrát.
-iterációnak, lásd még az 68 ábrát.

-iteráció algoritmusa:
Rögzítjük az iterációk maximális számát, MAXIT, és egy  tolerancia szintet. Választunk egy
tolerancia szintet. Választunk egy  skálafüggvényt.
skálafüggvényt.
A rögzített  -vel megkeressük
-vel megkeressük  -t, az optimális
-t, az optimális  szabályozót amire
szabályozót amire  úgy, hogy fennáll a
úgy, hogy fennáll a  becslés. Ha
becslés. Ha  a keresett robusztus szabályozó, ha nem, akkor tovább megyünk a
a keresett robusztus szabályozó, ha nem, akkor tovább megyünk a  . lépésre.
. lépésre.
Rögzített  szabályozóval egy új
szabályozóval egy új  skálázó szűrőt számolunk ki, minimalizálva
skálázó szűrőt számolunk ki, minimalizálva  értékét
értékét  függvényében.
függvényében.
Amennyiben minden  frekvencián
frekvencián  akkor
akkor  a keresett robusztus szabályozó, ha nem, tovább megyünk a
a keresett robusztus szabályozó, ha nem, tovább megyünk a  . lépésre.
. lépésre.
Ha elértük MAXIT-et, akkor az algoritmus nem szolgáltatott megoldást. Ellenkező esetben tovább megyünk az  . lépésre.
. lépésre.
Az első lépés egy standard  optimális szabályozási feladat megoldása.A második lépésben minimalizálni kell
optimális szabályozási feladat megoldása.A második lépésben minimalizálni kell  értékét, amit egy numerikus optimalizálással érünk el egy
értékét, amit egy numerikus optimalizálással érünk el egy  rácson, ahol a racionális
rácson, ahol a racionális  skálázó szűrőt közelítjük. A közelítés pontossága általában növeli a szűrő rendjét, így a keletkező szabályozó rendjét is. Ezért gyakran szükséges a
skálázó szűrőt közelítjük. A közelítés pontossága általában növeli a szűrő rendjét, így a keletkező szabályozó rendjét is. Ezért gyakran szükséges a  -optimális szabályozókat helyettesíteni egy redukált rendű szub-optimális szabályozóval.
-optimális szabályozókat helyettesíteni egy redukált rendű szub-optimális szabályozóval.
15. fejezet - Nemlineáris irányítások
Az irányításelmélet kezdeti korszakában a nemlineáris irányításelmélet legtöbb fogalma, mint a stabilitást, optimalitást és bizonytalanságot leíró fogalmak inkább leíró jellegűek voltak mint konstruktívak, azaz arra használták őket, hogy leírják a rendszer tulajdonságai ahelyett, hogy alkalmasak legyenek egy rendszer tervezésére, amely rendelkezik ezekkel a tulajdonságokkal. Később ezek a leíró fogalmak néhány módósítással alkalmasak lettek eléggé általános nemlineáris tervezési feladatok kezelésére is. A hangsúly ezen fogalmak és a visszacsatolás kapcsolatának explicit megfogására került, így például a Lyapunov technikát a kontroll Lyapunov függvényekre alapozott módszerek helyettesítik. Másik példa a rendszer visszacsatolással való passzívvá tétele vagy a disszipativitásra alapozott eljárások, mint a lineáris robusztus technikák nemlineáris kiterjesztései. A továbbiakban ezeknek a fogalmaknak és eljárásoknak a rövid bemutatására kerül sor.
15.1. Stabilitás
Definíció 14.1
Egy folytonos  függvény
függvény  osztálybeli, ha szigorúan növekvő és
osztálybeli, ha szigorúan növekvő és  . Ha
. Ha  és
és  , akkor a függvény
, akkor a függvény  osztálybeli.
osztálybeli.
Egy folytonos  függvény
függvény  osztálybeli, ha minden rögzített
osztálybeli, ha minden rögzített  -re a
-re a  függvény eleme
függvény eleme  -nak és minden rögzített
-nak és minden rögzített  esetén a
esetén a  függvény csökkenő és
függvény csökkenő és  .
.
Tekintsük a következő nemlineáris rendszert:
| (781) |

ahol  és
és  lokálisan Lipschitzes. A rendszer
lokálisan Lipschitzes. A rendszer  egyensúlyi helyének (asszimptotikus) stabilitása az ismert Lyapunov kritériummal jellemezhető:
egyensúlyi helyének (asszimptotikus) stabilitása az ismert Lyapunov kritériummal jellemezhető:
Tétel 14.1 (Lyapunov) Legyen  egy folytonosan differenciálható függvény úgy, hogy valamely
egy folytonosan differenciálható függvény úgy, hogy valamely  osztálybeli
osztálybeli  -n értelmezett
-n értelmezett  függvényekkel
függvényekkel

Ha
minden  esetén, akkor az
esetén, akkor az  egyensúlyi hely stabilis.
egyensúlyi hely stabilis.
Ha valamely  -beli
-beli  -n értelmezett
-n értelmezett  függvényre
függvényre
mindenl  esetén, akkor az
esetén, akkor az  egyensúlyi hely lokálisan asszimptotikusan stabilis (LAS).
egyensúlyi hely lokálisan asszimptotikusan stabilis (LAS).
Ha  és
és  -beli függvények, akkor az
-beli függvények, akkor az  egyensúlyi hely globálisan asszimptotikusan stabilis (GAS).
egyensúlyi hely globálisan asszimptotikusan stabilis (GAS).
Ha

akkor az  egyensúlyi hely lokálisan exponenciálisan stabilis (LES).
egyensúlyi hely lokálisan exponenciálisan stabilis (LES).
Külső zavarással gerjesztett rendszerekre a stabilitás lokális fogalmát a sokkal hasznosabb bemenetről--állapotra (input-to-state) stabilitás váltja fel.
Tekintsük a
| (782) |

nemlineáris rendszert, ahol  és
és  lokálisan Lipschitzes az
lokálisan Lipschitzes az  halmazon.
halmazon.
Definíció 14.2
A (782) rendszer bemenetről--állapotra (input-to-state) stabilis ha létezik egy  osztálybeli
osztálybeli  függvény és egy
függvény és egy  osztálybeli
osztálybeli  függvény (erősítés) úgy, hogy minden lokálisan korlátos
függvény (erősítés) úgy, hogy minden lokálisan korlátos  bemenet és minden
bemenet és minden  kezdeti érték esetén az
kezdeti érték esetén az  válaszfüggvény kielégíti az
válaszfüggvény kielégíti az

egyenlőtlenséget minden  esetén.
esetén.
Tétel 14.2 (ISS--Lyapunov) Egy folytonosan differenciálható  függvényt ISS--Lyapunov függvénynek nevezünk, ha léteznek
függvényt ISS--Lyapunov függvénynek nevezünk, ha léteznek  osztálybeli
osztálybeli  függvények és egy
függvények és egy  osztálybeli
osztálybeli  függvény úgy, hogy:
függvény úgy, hogy:

minden  esetén és
esetén és
| (783) |

minden  és
és  esetén.
esetén.
Az (782) rendszer akkor és csak akkor bemenetről--állapotra stabilis ha létezik hozzá ISS--Lyapunov függvény.
A nemlineáris esetben alkalmazott leggyakoribb módszer a kontrol Lyapunov függvényre alapozott eljárás, ami analóg a homogén rendszerekre alkalmazott Lyapunov eljárással.
Definíció 14.3
Legyen egy
input affin nemlineáris rendszer, ahol  valamint
valamint  és
és  sima függvények. Feltesszük, hogy a szabályozó jelek
sima függvények. Feltesszük, hogy a szabályozó jelek  egy
egy  részhalmazából valók. Egy
részhalmazából valók. Egy  pozitív definit függvényt, amelyre minden
pozitív definit függvényt, amelyre minden  -ra a
-ra a  halmaz kompakt kontrol Lyapunov függvénynek nevezünk, ha
halmaz kompakt kontrol Lyapunov függvénynek nevezünk, ha


rendelkezik a kis erősítési tulajdonsággal, ha minden  esetén létezik
esetén létezik  úgy, hogy
úgy, hogy  kielégíti
kielégíti  egyenlőtlenséget akkor létezik
egyenlőtlenséget akkor létezik  úgy, hogy
úgy, hogy  amire
amire  .
.
A sima stabilizáló visszacsatolás léte feltételezi egy kontrol Lyapunov függvény meglétét és fordítva, elég általános  halmazokra ha létezik
halmazokra ha létezik  az adott tulajdonságokkal, akkor van
az adott tulajdonságokkal, akkor van  , a rendszert globálisan stabilizáló sima visszacsatolás.
, a rendszert globálisan stabilizáló sima visszacsatolás.
Ezek a fogalmak általánosíthatók zavarással terhelt

rendszerek esetére is. A  zavarások egy kompakt
zavarások egy kompakt  halmazbeli értékeket felvevő mérhető függvények. Feltételezzük, hogy
halmazbeli értékeket felvevő mérhető függvények. Feltételezzük, hogy  minden
minden  esetén.
esetén.
Definíció 14.4
 kontrol Lyapunov függvény egyenletes, ha
kontrol Lyapunov függvény egyenletes, ha

minden  és
és  esetén.
esetén.

rendelkezik az egyenletes kis erősítési tulajdonsággal, ha minden  -ra van
-ra van  úgy, hogy ha
úgy, hogy ha  -ra
-ra  , akkor létezik
, akkor létezik  amire
amire  úgy, hogy
úgy, hogy  minden
minden  esetén.
esetén.
15.2. Disszipatív rendszerek
Tekintsünk egy
| (784) |


nemlineáris rendszert.
Egy, az ISS tulajdonsághoz nagyon hasonló fogalmat kaphatunk, ha annak definíciójában az (783) egyenletben a  osztalybeli
osztalybeli  függvény helyett egy tetszőleges
függvény helyett egy tetszőleges  függvényt veszünk, amelyre
függvényt veszünk, amelyre  . Ezt a függvényt disszipativitási függvénynek nevezzük.
. Ezt a függvényt disszipativitási függvénynek nevezzük.
Definíció 14.5
A(784)rendszer disszipatív a  disszipativitási függvényre nézve ha van egy folytonosan differenciálható
disszipativitási függvényre nézve ha van egy folytonosan differenciálható  függvány, amelyre
függvány, amelyre
min  esetén, ahol
esetén, ahol  és
és  -beli függvények úgy, hogy
-beli függvények úgy, hogy
| (785) |

minden  és
és  esetén.
esetén.
A rendszer szigorúan disszipatív, ha valamely  -beli
-beli  függvénnyel
függvénnyel
| (786) |


-t tároló függvénynek nevezzük, az (784) és (785),(786) egyenlőtlenségeket pedig disszipativitási egyenlőtlenségeknek.
A disszipációs egyenlőtlenség még a

formába is írható.
Bevezethető még a rendelkezésre álló energia függvény mint
és a szükséges energi függvény, mint
ahol  .
.
A rendszer akkor és csak akkor disszipatív, ha ezek a függvények valós véges értékű függvények. Ekkor  a legkisebb és
a legkisebb és  a legnagyobb lehetséges
a legnagyobb lehetséges  tároló függvény, azaz minden
tároló függvény, azaz minden  előáll ezek konvex kombinációjaként:
előáll ezek konvex kombinációjaként:  .
.
A disszipatív rendszerek nem tudnak több energiát leadni mint a betáplált energia.
Általában kvadratikus
| (787) |
disszipativitási függvényeket használunk, ahol  és
és  szimmetrikus mátrixok.
szimmetrikus mátrixok.
Tétel 14.3 A
nemlineáris rendszer akkor és csak akkor disszipatív a (787) disszipativitási függvényre nézve, ha
- az alábbi

mátrix mindeb  -re pozitív szemidefinit,
-re pozitív szemidefinit,
- létezik egy folytonosan differenciálható pozitív szemidefinit  függvény, amelyre minden
függvény, amelyre minden  esetén az
esetén az

halmaz nem üres, és minden  -ra
-ra

15.3. Passzív rendszerek
Definíció 14.6
Tekintsünk egy  disszipativitási függvényt, melyre
disszipativitási függvényt, melyre  minden
minden  -ra és
-ra és  minden
minden  -ra.
-ra.
A (784) rendszer, ahol  passzív a
passzív a  disszipativitási függvényre nézve, ha létezik egy
disszipativitási függvényre nézve, ha létezik egy  tároló függvény amelyre
tároló függvény amelyre
| (788) |
minden  ,
,  és
és  esetén.
esetén.
Általában  választással élünk.
választással élünk.
Pozitív definit tároló függvénnyel rendelkező passzív rendszerek asszimptotikusan stabilisak.
Tétel 14.4 (Kalman--Yakubovich--Popov) Egy passzív (784) rendszer esetén:


Ezek a feltételek egy
input affin rendszer esetén a

formába írhatók.
A (784) nemlineáris rendszer passzívá tehető, ha létezik egy  visszacsatolás, amire a zárt kör passzív.
visszacsatolás, amire a zárt kör passzív.
15.4. Nemlineáris  szabályozás
szabályozás
A nemlineáris  szabályozás a már ismert
szabályozás a már ismert  elmélet egy nemlineáris kiterjesztése.A tervezés célja, hogy egy olyan nelineáris szabályozót kapjunk, melyre a zárt kör stabilis és az
elmélet egy nemlineáris kiterjesztése.A tervezés célja, hogy egy olyan nelineáris szabályozót kapjunk, melyre a zárt kör stabilis és az  erősítése a legkisebb.
erősítése a legkisebb.
15.4.1.  -disszipativitás
-disszipativitás
Definíció 14.7
Egy rendszer  erősítése véges (
erősítése véges ( --disszipatív) ha valamely
--disszipatív) ha valamely  -ra disszipatív a
-ra disszipatív a
| (789) |

disszipativitási függvényre nézve.
Ha a rendszer zérus-állapot detektálható és az  erősítése véges, akkor globálisan asszimptotikusan stabilis.
erősítése véges, akkor globálisan asszimptotikusan stabilis.
Definíció 14.8
Egy rendszer zérus-állapot detektálható ha minden  esetén a
esetén a  egyenlet
egyenlet  megoldása minden
megoldása minden  esetén létezik és
esetén létezik és  fennállása
fennállása  -ön implikálja, hogy
-ön implikálja, hogy  .
.
Ebben a speciális esetben a 14.3 Tétel az alábbi formára egyszerűsödik:
Lemma 14.1 (Bounded Real Lemma) A
rendszer akkor és csak akkor  --disszipatív, ha
--disszipatív, ha
- a
| (790) |

mátrix minden  -re pozitív definit és
-re pozitív definit és
- létezik egy folytonosan differenciálható pozitív szemidefinit  függvény, hogy minden
függvény, hogy minden  -re fennáll az alábbi Hamilton-Jacobi egyenlőtlenség
-re fennáll az alábbi Hamilton-Jacobi egyenlőtlenség

| (791) |

15.4.2. Nemlineáris  feladat
feladat
Tekintsük az alábbi input affin alakban adott
| (792) |


nemlineáris rendszert, ahol az egyes függvények legalább kétszer folytonosan differenciálhatók és az egyensúlyi pontban  ,
,  és
és  . Feltesszük továbbá, hogy
. Feltesszük továbbá, hogy

vagyis a feladat reguláris.
A  szabályozó alakja
szabályozó alakja
| (793) |


Ez a szabályozó megoldása a disszipatív irányítási feladatnak, ha a zárt kör  -disszipatív. Ha a rendszer lineáris, ez épp azt jelenti, hogy a zárt kör
-disszipatív. Ha a rendszer lineáris, ez épp azt jelenti, hogy a zárt kör  normája kisebb mint
normája kisebb mint  . Ha a rendszer zérus-állapot detektálható akkor a
. Ha a rendszer zérus-állapot detektálható akkor a  -disszipatívitás garantálja a rendszer globális asszimptotikus stabilitását is.
-disszipatívitás garantálja a rendszer globális asszimptotikus stabilitását is.
15.4.2.1. Állapotvisszacsatolásos  feladat
feladat
Tekintsük az alábbi egyszerüsített rendszert:
| (794) |



ahol feltesszük, hogy  és
és  minden
minden  -re.
-re.
Az  állapotvisszacsatolás alkalmazásával kapjuk, hogy
állapotvisszacsatolás alkalmazásával kapjuk, hogy

Ekkor a  --disszipativitási feltételből (Baounded Real Lemma) a zárt körre
--disszipativitási feltételből (Baounded Real Lemma) a zárt körre
| (795) |
feltétel adódik, ami általában nemlineáris a  és
és  ismeretlenekben.
ismeretlenekben.
Az  stb. és a
stb. és a  ahol
ahol  feltételezéssel élve, valamint az
feltételezéssel élve, valamint az  transzformáció alkalmazásával kapjuk, hogy:
transzformáció alkalmazásával kapjuk, hogy:
| (796) |
ami már lineáris az  és
és  ismeretlenekben. Ebből az egyenletből kapható a következő konvex feltétel:
ismeretlenekben. Ebből az egyenletből kapható a következő konvex feltétel:
| (797) |

ahol  a
a  feltétellel.
feltétellel.
15.4.2.2. Kimenet visszacsatolásos  feladat
feladat
Ha az állapotvisszacsatolás helyett adott méréseket felhasználó szabályozót akarunk használni, tekintsük a következő rendszert
| (798) |



ahol feltesszük, hogy  , valamint
, valamint  és
és  minden
minden  esetén.
esetén.
Erre az esetre a dinamikus visszacsatolás létezési feltételei a következők:
| (799) |

| (800) |

és
ahol  és
és  .
.
15.5. Nemlineáris megfigyelők
15.5.1. Állapotfüggetlen Lyapunov függvények (SIELF)
Ha adott a
| (801) |

rendszer, arra a kérdésre keressük a választ, hogy milyen feltételekkel létezik egy

megfigyelő úgy, hogy legyen hozzá olyan  Lyapunov függvény, ami csak az
Lyapunov függvény, ami csak az  becslési hibától függ, azaz
becslési hibától függ, azaz

minden  és
és  esetén.
esetén.
Tegyük fel, hogy

Tétel 14.5 Ha  egy SIELF Lyapunov függvény, akkor
egy SIELF Lyapunov függvény, akkor

minden  -re.
-re.
Ha a  függvény
függvény  -beli, akkor
-beli, akkor  nemnegatív és
nemnegatív és

minden  -re.
-re.
Definíció 14.9
Egy radiálisan nemkorlátos  függvény egy megfigyelési Lyapunov függvény (OLF) ha
függvény egy megfigyelési Lyapunov függvény (OLF) ha

minden  -re.
-re.
Tétel 14.6 Ha a mérési egyenlet lineáris és  valamint
valamint

minden  -re akkor
-re akkor  egy kvadratikus SIELF
egy kvadratikus SIELF  minden kompakt
minden kompakt  részhalmazán, és létezik
részhalmazán, és létezik  melyre
melyre

minden  -re és
-re és  esetén.
esetén.
Tétel 14.7 Ha a mérési egyenlet lineáris és létezik egy pozitív definit  mátrix, egy
mátrix, egy  vektor és pozitív
vektor és pozitív  függvények úgy, hogy
függvények úgy, hogy

és

minden  -re akkor
-re akkor  egy SIELF.
egy SIELF.
Megjegyzés 14.1 Tekintsük példaként a

| (802) |


rendszert.
Ekkor a
transzformációval kapjuk, hogy
| (803) |


A (803) rendszerhez tartozik kvadratikus SIELF, például
Azonban az eredeti rendszerhez nincs ilyen Lyapunov függvény.
15.5.2. Passzivitásos technika
Tekintsük a
| (804) |

| (805) |

dinamikus rendszert, ahol  egy időben változó külső bemenet.
egy időben változó külső bemenet.
Definíció 14.10
A (804) rendszer egyenletesen  passzív a
passzív a  párra nézve, ha létezik egy
párra nézve, ha létezik egy  tároló függvény és
tároló függvény és  -beli
-beli  függvények valamint egy
függvények valamint egy  folytonos pozitív definit függvény amelyre:
folytonos pozitív definit függvény amelyre:



minden  és
és  esetén.
esetén.
Az állapottér egy adott  particionálására és ha
particionálására és ha  a rendszer parciálisan egyenletesen
a rendszer parciálisan egyenletesen  passzív (PSUP) az
passzív (PSUP) az  párra nézve és
párra nézve és  választással.
választással.
Ha a
| (806) |


rendszerhez létezik állapotmegfigyelő, annak alakját vehetjük a
| (807) |

formában, ahol  és
és  nemszinguláris. Ekkor a kapcsolódó hiba dinamika alakja
nemszinguláris. Ekkor a kapcsolódó hiba dinamika alakja
| (808) |

| (809) |

| (810) |
ahol  és
és  valamint
valamint  .
.
A (807) rendszer egy passzivitásos megfigyelője (PSO) a rendszernek, ha a hiba dinamika PSUP a  párra nézve
párra nézve  -ről
-ről  -ra a
-ra a

visszacsatolással.
A továbbiakban tegyük fel, hogy  és
és  valamint létezik
valamint létezik  tárolófüggvény,
tárolófüggvény,  és invertálható
és invertálható  mátrixok úgy, hogy
mátrixok úgy, hogy


minen  és
és  esetén, ahol
esetén, ahol  függvények
függvények  -beliek és
-beliek és  egy folytonos pozitív függvény.
egy folytonos pozitív függvény.
Tegyük fel továbbá, hogy  és
és  nemnegatív függvényekkel
nemnegatív függvényekkel


minden  és
és  esetén, ahol
esetén, ahol


Tétel 14.8 A fenti feltevések mellet a PSO rendszer a

mellet minden  -ra egy PSUP hibadinamikával rendelkezik a
-ra egy PSUP hibadinamikával rendelkezik a  párra nézve és a
párra nézve és a  visszacsatolással.
visszacsatolással.
A tétel második feltétele helyettesíthető az alábbival:



15.5.3. Lipschitz nemlineáris rendszerek
Tekintsük az alábbi Lipschitz nemlineáris rendszert:


ahol

minden  és
és  esetén.
esetén.
Tekintsük egy

megfigyelőt, amelyhez a
| (811) |

hibaegyenletek tartoznak. Tegyük fel, hogy a (811) megfigyelőhöz tartozik egy kvadratikus  SIELF. Mivel
SIELF. Mivel

| (812) |

ahol  alkalmas pozitív állandók úgy, hogy
alkalmas pozitív állandók úgy, hogy  , következik, hogy
, következik, hogy

| (813) |

ahol  , azaz
, azaz
| (814) |

Az
| (815) |
választással kapjuk, hogy
| (816) |

Ha
| (817) |

akkor (816) az alábbi formában írható:
| (818) |
16. fejezet - Mintavételezett rendszerek irányítása
A fizikai szemlélet megtartásának fontossága miatt a folytonos idejű rendszer leírásokat elterjedten alkalmazzák a mechanikai és jármű modellekben. Ezért az irányítás tervezést is folytonos időben a bemutatott módszerekkel oldják meg. A beavatkozó szervek többnyire folytonos idejű mechanikai, hidraulikai és pneumatikai eszközök, ezek dinamikáját a szabályozott rendszer dinamikával együtt szoktuk kezelni.
A mai -- intelligensnek is nevezett -- rendszereinkben a modern szenzorok, mikroelektronika és informatika alkalmazása dominál. Az irányítás implementációja így igen gyakran digitális számítógépeken történik
16.1. Diszkrét idejű szabályozás felépítése
Egy tipikus szabályozási kört illusztrál a 15.1 ábra. A folytonos idejű rendszer a beavatkozó szerv dinamikát is magában foglalja. A folytonos idejű jelből, amely az A/D átalakító analóg bemenőjele, kódolási eljárással diszkrét idejű impulzus sorozatot állítunk elő, mely az A/D átalakító kimenő jele. Ezt nevezzük A/D átalakításnak. Az átalakítás során fontos szerepet tölt be a tartószerv. A tartószerv feladata hogy az A/D konverter kimenő impulzussorozatából két mintavétel között folytonos idejű jelet biztosítson. A tartószerv típusa meghatározza, hogy két mintavételi időpont között hogyan változik a jel. A legegyszerűbb tartószerv a zérusrendű (ZOH: Zero Order Hold) tartószerv, mely állandó értéken (előző kimeneti függvény érték) tartja a kimenetet, míg a a következő mintavétel sorra nem kerül.
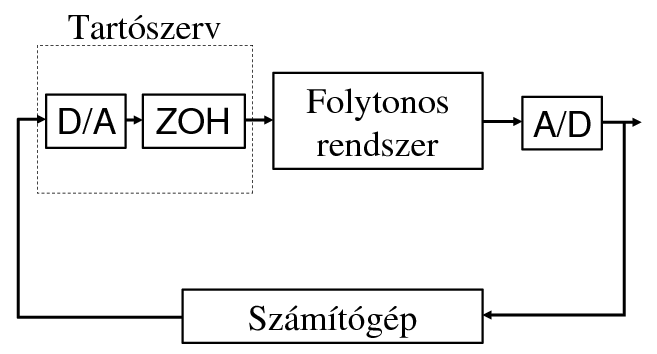
A zérus rendű tartószerv a D/A átalakító kimenetét integrálja  mintavételi ideig. Így a zérusrendű tartószerv átviteli függvénye:
mintavételi ideig. Így a zérusrendű tartószerv átviteli függvénye:
| (819) |
Elsőrendű tartó (FOH) a két mintavételi pont értékeinek adott meredekségű összekötését biztosítja. Működésüket a 15.2 ábra illusztrálja. Léteznek magasabbrendű tartószervek, melyek törekszenek a folytonos jelalak két mintavétel közötti értékének minél tökéletesebb visszaadására.
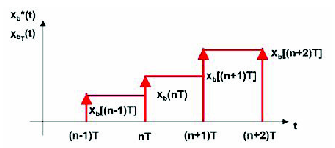
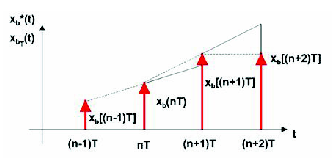
Az időben folytonos rendszer kimenetét diszkrét jellé alakítja kódolási eljárással. Ezt a diszkretizált, majd digitalizált jelet használjuk fel a számítógéppel irányított szabályozó bemeneteként. Ezt a műveletet A/D átalakításnak nevezzük és a 69 ábrán illusztráljuk.
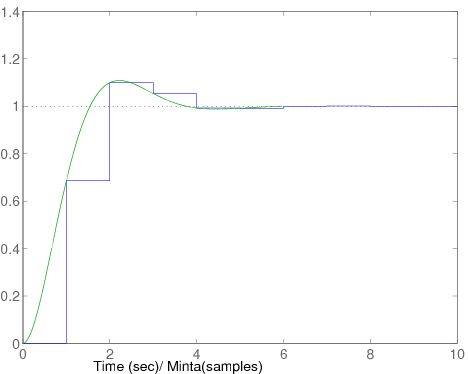
16.2. Az egységugrásra ekvivalens diszkrét idejű állapottér reprezentáció
Legyen adott az alábbi folytonos idejű állapottér reprezentáció,  kezdeti állapottal:
kezdeti állapottal:


ahol az inhomogén állapotegyenlet megoldása a következő:

Diszkrét  időpontokra felírva
időpontokra felírva  helyettesítéssel kapjuk az alábbi összefüggést:
helyettesítéssel kapjuk az alábbi összefüggést:

Legyen a mintavételi idő állandó, azaz

valamint feltételezzük, hogy két mintavételi idő között a bemenőjel nem változik. Alkalmazzuk az alábbi változó transzformációt:

továbbá  Ekkor
Ekkor

Tehát a diszkrét idejű állapottér reprezentáció


ahol

Tömörebb írásmóddal a diszkrét idejű állapottér reprezentáció fenti alakjában a diszkrét időpontokat csak indexükkel szerepeltetjük:

Példa 15.1
Átviteli függvénnyel adott rendszer diszkrét állapottér reprezentációja.
Vizsgáljuk az alábbi egytárolós arányos tagot:

Az 1TP tag folytonos állapottér reprezentációját az alábbi alakban írhatjuk fel:


azaz  ,
,  és
és  . Határozzuk meg az egységugrásra ekvivalens diszkrét idejű állapottér reprezentáció paraméter mátrixait.
. Határozzuk meg az egységugrásra ekvivalens diszkrét idejű állapottér reprezentáció paraméter mátrixait.
Az egységugrásra ekvivalens diszkrét idejű állapottér reprezentáció mátrixai:

és a diszkrét idejű alak:


Példa 15.2
Diagonál alakban adott rendszer diszkrét állapottere.
Adott az alábbi átviteli függvény:
Írjuk fel a rendszer folytonos idejű állapottér reprezentációját diagonális alakban. A folytonos rendszer pólusai a  és
és  helyeken vannak. Levezetés nélkül az állapottér reprezentáció az alábbi:
helyeken vannak. Levezetés nélkül az állapottér reprezentáció az alábbi:

Határozzuk meg az egységugrásra ekvivalens diszkrét idejű állapottér reprezentáció paraméter mátrixait.
Példa 15.3
Írjuk fel az alábbi folytonos alakú állapottér reprezentáció diszkrét megfelelőjét. Folytonos állapottér reprezentáció:

A diszkrét állapottér reprezentáció elemei:

16.3. Diszkrét idejű rendszerek analízise
A továbbiakban a diszkrét idejű rendszerek legfontosabb tulajdonságaival foglalkozunk. Ezek a stabilitás, megfigyelhetőség, irányíthatóság, továbbá két, a folytonos rendszereknél nem elkülönülő rendszer tulajdonság, az állapot rekonstruálhatóság és elérhetőség.
16.3.1. Diszkrét idejű rendszerek stabilitása
Folytonos idejű stabil rendszerek esetén az állapottér reprezentáció  mátrixa sajátértékeinek a bal komplex félsíkon kell elhelyezkedniük. A mintavételezéssel kapott rendszerben az
mátrixa sajátértékeinek a bal komplex félsíkon kell elhelyezkedniük. A mintavételezéssel kapott rendszerben az  mátrixnak a
mátrixnak a  mátrix felelt meg. Az exponenciális függvény az
mátrix felelt meg. Az exponenciális függvény az  matrix baloldali sajátértékeit a komplex egységkör belsejére képezi le. Így kimondható a következő állítás.
matrix baloldali sajátértékeit a komplex egységkör belsejére képezi le. Így kimondható a következő állítás.
Állítás 15.1 A diszkrét idejű LTI rendszer stabilis akkor és csak akkor, ha 
A folytonos és diszkrét rendszerek pólusainak elhelyezkedésére mutat példát a 15.3.1 ábra.
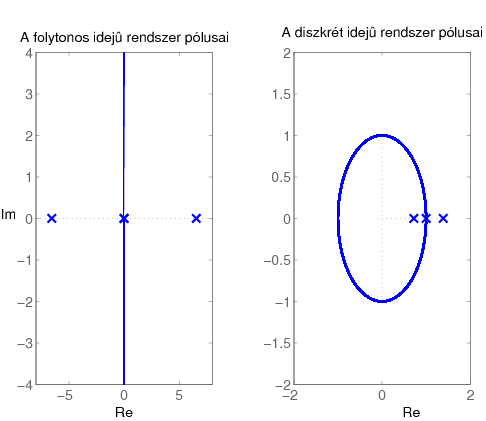
16.3.2. Állapotmegfigyelhetőség és rekonstruálhatóság
A diszkrét idejű rendszereknél megkülönböztetünk megfigyelhetőséget, ami a rendszer állapotának a jövőbeli megfigyelésekből (mérésekből) való meghatározhatóságát jelenti, továbbá rekonstruálhatóságot, amely a rendszer állapotának a múltbeli megfigyelésekből (mérésekből) való meghatározhatóságát jelenti.
A folytonos idejű rendszerek megfigyelhetőségére kapott eredmények közvetlenül átvihetők diszkrét idejű rendszereke.
Definíció 15.1 Az 
mátrixot a diszkrét idejű rendszer megfigyelhetőségi mátrixának nevezzük, ahol
Állítás 15.2 (A megfigyelhetőség Kálmán-féle rangfeltétele) Egy  pár megfigyelhető akkor és csak akkor, ha megfigyelhetőségi mátrixuk rangja megegyezik az állapottér dimenziójával, azaz
pár megfigyelhető akkor és csak akkor, ha megfigyelhetőségi mátrixuk rangja megegyezik az állapottér dimenziójával, azaz
A rekonstruálhatóság a rendszeridentifikációban és a predikcióban fontos tulajdonság.
Definíció 15.2 A  mátrixot a diszkrét idejű rendszer rekonstruálhatósági mátrixának nevezzük, ahol
mátrixot a diszkrét idejű rendszer rekonstruálhatósági mátrixának nevezzük, ahol
Állítás 15.3 (Az állapot rekonstruálhatóság rangfeltétele) Egy  pár rekonstruálható akkor és csak akkor, ha rekonstruálhatósági mátrixuk rangja megegyezik az állapottér dimenziójával, azaz
pár rekonstruálható akkor és csak akkor, ha rekonstruálhatósági mátrixuk rangja megegyezik az állapottér dimenziójával, azaz
16.3.3. Állapot irányíthatóság és elérhetőség
A folytonos idejű rendszerek irányíthatóságának kapott eredmények közvetlenül átvihetők diszkrét idejű rendszerekre is. Itt is meg kell azonban különböztetni az állapot irányíthatóságát egy tetszőleges kezdő állapotból az állapottér origójába attól az esettől amikor tetszőleges végállapotba kivánjuk a rendszert irányítani.
Az állapottér origójába való irányíthatóságot vizsgáljuk először.
Definíció 15.3 Az  mátrixot a diszkrét idejű rendszer irányíthatósági mátrixának nevezzük, ahol
mátrixot a diszkrét idejű rendszer irányíthatósági mátrixának nevezzük, ahol

Állítás 15.4 (Az irányíthatóság Kálmán-féle rangfeltétele) Egy  pár akkor és csak akkor irányítható, ha irányíthatósági mátrixuk rangja megegyezik az állapottér dimenziójával, azaz
pár akkor és csak akkor irányítható, ha irányíthatósági mátrixuk rangja megegyezik az állapottér dimenziójával, azaz
A tetszőleges végállapotba való irányíthatóságot elérhetőségnek nevezzük.
Definíció 15.4 Az  mátrixot a diszkrét idejű rendszer elérhetőségi mátrixának nevezzük.
mátrixot a diszkrét idejű rendszer elérhetőségi mátrixának nevezzük.
Állítás 15.5 (Az állapot elérhetőség rangfeltétele) Egy  pár akkor és csak akkor elérhető, ha elérhetőségi mátrixuk rangja megegyezik az állapottér dimenziójával, azaz
pár akkor és csak akkor elérhető, ha elérhetőségi mátrixuk rangja megegyezik az állapottér dimenziójával, azaz
Példa 15.4 (Irányíthatóság és megfigyelhetőség)
Vizsgáljuk meg az alábbi állapottér reprezentációval adott rendszer irányíthatóságát és megfigyelhetőségét.
Írjuk fel az irányíthatósági mátrixot:
Mivel  , ezért a rendszer irányítható. Írjuk fel a megfigyelhetőségi mátrixot:
, ezért a rendszer irányítható. Írjuk fel a megfigyelhetőségi mátrixot:
Mivel  , ezért a rendszer megfigyelhető.
, ezért a rendszer megfigyelhető.
Példa 15.5 (Irányíthatóság és megfigyelhetőség)
Vizsgáljuk meg az alábbi állapottér reprezentációval adott rendszer irányíthatóságát és megfigyelhetőségét.
Írjuk fel az irányíthatósági és a megfigyelhetőségi mátrixokat:
Mivel  és
és  , ezért a rendszer nem irányítható és nem is megfigyelhető.
, ezért a rendszer nem irányítható és nem is megfigyelhető.
16.4. Diszkrét idejű rendszerek irányítása és a Kalman-szűrő
Legyen a diszkrét idejű rendszer állapot egyenlete

és legyen a  mátrixhoz tartozó karakterisztikus egyenlet
mátrixhoz tartozó karakterisztikus egyenlet

Alkalmazzunk teljes állapot visszacsatolást

alakban. A kérdés az, hogy a folytonos idejű rendszereknél megismert módon lehet-e a  erősítés alkalmas megválasztásával a zárt körben tetszőleges karakterisztikus polinomot, azaz tetszőleges pólus konfigurációt elérni.
erősítés alkalmas megválasztásával a zárt körben tetszőleges karakterisztikus polinomot, azaz tetszőleges pólus konfigurációt elérni.
Bebizonyítható, hogy ha  irányítható, akkor a zárt rendszer
irányítható, akkor a zárt rendszer

karakterisztikus polinomjának együtthatói tetszőlegesen beállíthatók, a  erősítés pedig a már ismert összefüggés alapján számítható:
erősítés pedig a már ismert összefüggés alapján számítható:

ahol  az
az  polinomok együtthatóiból képzett vektorok.
polinomok együtthatóiból képzett vektorok.
A LQR feladatot az alábbi módon adhatjuk meg. Keressük azt az  irányítást, amely minimalizálja az alábbi kritériumot (funkcionált):
irányítást, amely minimalizálja az alábbi kritériumot (funkcionált):

ahol  a rendszer végállapota.
a rendszer végállapota.
Arra az esetre, ha  az LQR kritérium a következőképp irható:
az LQR kritérium a következőképp irható:
Tegyük fel, hogy  elérhető és megfigyelhető. Ekkor az az optimális irányítás:
elérhető és megfigyelhető. Ekkor az az optimális irányítás:

ahol a  mátrix az alábbi (diszkrét idejű) Riccati - egyenlet (CARE) egyértelmű, pozitív definit megoldása:
mátrix az alábbi (diszkrét idejű) Riccati - egyenlet (CARE) egyértelmű, pozitív definit megoldása:

Az LQR kritérium minimuma:

Ha több bemenet és kimenet van, akkor a megfigyelési egyenlet  , az LQR kritérium pedig
, az LQR kritérium pedig

alakú, az optimális irányítás

ahol a  mátrix az alábbi (diszkrét idejű) mátrix Riccati - egyenlet (CARE) egyértelmű, pozitív definit megoldása:
mátrix az alábbi (diszkrét idejű) mátrix Riccati - egyenlet (CARE) egyértelmű, pozitív definit megoldása:

Az LQG irányítás és a Kalman - szűrő diszkrét idejű megfelelőjét úgy kapjuk hogy a diszkrét idejű sztochasztikus állapottér reprezentációját írjuk fel a rendszernek (mindjárt a többváltozós eset egyenleteit írva):



A diszkrét idejű Kalman szűrő:


Bizonyítható, hogy az állapot kovariancia mátrix nyomát akkor minimalizáljuk, ha a Kalman szűrő erősítési mátrixa

ahol  a diszkrét idejű szűrő Riccati egyenlet FARE egyértelmű pozitív definit megoldása (ez létezik, ha
a diszkrét idejű szűrő Riccati egyenlet FARE egyértelmű pozitív definit megoldása (ez létezik, ha  rekonstruálható):
rekonstruálható):

Az LQG irányításban az optimális irányítást a determinisztikus esethez hasonlóan a becsült állapot visszacsatolásával kapjuk

ahol  a (ref) CARE megoldása alapján számolt állapot visszacsatolás erősítési mátrixa.
a (ref) CARE megoldása alapján számolt állapot visszacsatolás erősítési mátrixa.
17. fejezet - Irányítási rendszerek implementálása, beágyazott rendszerek
17.1. Az implementálás alapfeladatai
Egy komplex rendszer működése során különféle feladatokat old meg:
Mérés, adatgyűjtés és adatfeldolgozás.
Detektálás.
Irányítás.
Beavatkozás.
Kommunikáció.
Ezek a feladatok egymással összefüggnek, általában kölcsönhatásban vannak, amit a 70 ábra illusztrál. Az alábbiakban röviden áttekintjük a legfontosabb elemek jellemzőit.
17.1.1. Mérés, érzékelés
Komplex műveletek:
Digitalizálás, előfeldolgozás.
Jelfeldolgozás: szűrések, transzformációk.
Detektálás: változásdetektálás, hibadetektálás.
Komplex érzékelők:
Bonyolult mérési feladatok: GPS - vevő.
Bonyolult mérési eredmény: képérzékelő, kamera.
Példaként egy jármű pozicióérzékelését mutatjuk be a 71 ábrán. A GPS vevő által szolgáltatott pozició értékek a vevő mintavételezési gyakorisága, valamint a működés során gyakra tapasztalt műhold érzékelési bizonytalanságok miatt pontatlan lehet. A pozicióértékek pontosításáért az inerciális mérőrendszer a felelős. Ez a jármű gyorsulás és szögsebesség adatai alapján az adatok rövidtávú korrekciójára képes.
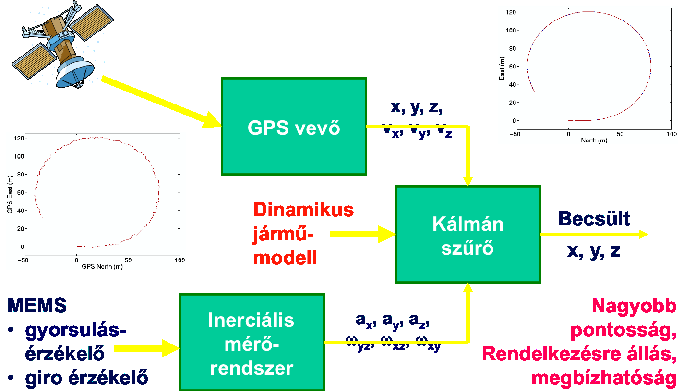
17.1.2. Beavatkozás
A beavatkozás a feladat jellegével összhangban egyszerű vagy összetett beavatkozó szervek működését igényli.
Egyszerű beavatkozó szervek: Kapcsolók, relék, elektromágneses aktuátorok, elektromos motorok. Példát mutat a 72 ábra. Komplex beavatkozó szervek: szervo mechanizmusok, szabályozott beavatkozások.
Egy gépjármű fékrendszer működésén keresztül mutatjuk be a szabályozott beavatkozások működését. Egy féket illusztrál a 73 ábra. A fék nagyszámú feladat megoldásáért felelős.

Az alábbiakban felsorolunk néhány funkciót. Gépjármű fékrendszer blokksémája 74. ábrán látható.
ABS / EBS rendszer.
Jármű lassítása, megállítása.
Fékek egyenletes kopása.
Optimális abroncskopás.
Megbízhatóság, hibatűrés.
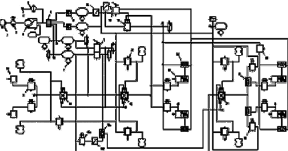
17.1.3. Irányítás
A tankönyvben különféle irányítási algoritmusokat és módszereket mutattunk be, így most csak egy példát adunk.
Egy ESP (Electronic Stability Program) működése során nagyszámú feladatot kell egyidőben teljesíteni. Néhány példát adunk az alábbi felsorolásban.
ABS / EBS rendszer.
Jármű lassítása, megállítása.
Fékek egyenletes kopása.
Optimális abroncskopás.
Megbízhatóság, hibatűrés.
A 75. ábrán az ESP egy tipikus működési módját illusztráltuk.


17.1.4. Detektálás
Egy komplex rendszer irányítási sémájában fontos szerepet töltenek be a detektálási feladatok. Ilyen feladatokat jelentenek a adott objektum, jelenség szelektív felismerése, amit minél nagyobb megbízhatósággal kell biztosítani. Néhány detektálási példa felsorolásszerűen:
Vizuális objektum / mozgás detektálás.
Hangfelismerés.
Rendszer működési változásainak / hibáinak detektálása.
Példaként a reaktor és primerköri hibadetektálást és diagnosztikát illusztráljuk, ld. 76 ábra. Ezekre a feladatokra a következők jellemzőek
Közvetlenül nem megfigyelhető jelenségek.
Zajos, korrelált mérések.
Dinamikus rendszerkomponensek.
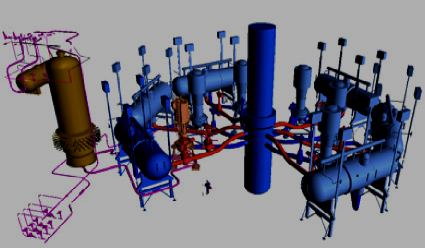
17.1.5. Kommunikáció
Vezetékes és vezeték nélküli digitális hálózati kommunikáció során a következő feladatokat kell megoldani:
Optimális kódolás, adattömörítés.
Konfliktuskezelés.
Útvonalkezelés.
Hibajavítás.
Titkosítás.
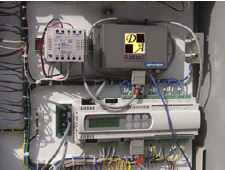
Példaként egy Ethernetes, azaz 'web-alapú irányítást' mutatunk be. A megoldást a beágyazott web-szerver biztosítja szabályozóban (PLC): távoli felügyelet, adminisztráció, karbantartás. A hardveres megvalósítást és a kommunikációs sémát a 77 ábraillusztrálja.
17.2. Beágyazott járműirányító rendszer
Beágyazott rendszerek fejlesztése
a komponensek,
a fejlesztőeszközök és
a módszerek mindegyikét érinti.
A rendszer komponensei a mikrovezérlők és mikroszámítógépeken kívül a digitális és specifikus feladatokat ellátó digitális jelfeldolgozó processzorok A mikrovezérlők 8-16-32 bites egységek saját adat- és programmemóriával, perifériakészlettel. Architektúrájuk megvalósítása egy áramköri lapkán történik. A mikroszámítógépek 32-64 bites egységek belső ás külső memória és periféria meghajtó képességgel. A digitális jelfeldolgozó processzorok (DSPk) speciális utasításkészlettel kiegészített mikrovezérlők. A speciális feldolgozó elemek közé tartoznak a kommunikációs processzorok, hang- és képfeldolgozó processzorok.
A fejlesztőeszközök feladatai sokrétűek, úgy mint a tervezés, prototípus előállítás, mérés és tesztelés. Rendszerszintű fejlesztő eszközök közé tartoznak a rendszer specifikáló, konfiguráló eszközök, rendszerszintű teszt, validációs és verifikációs eszközök Áramkör és NYÁK tervező eszközök az elvi kapcsolási rajz szintű áramkörtervező és szimulációs, nyomtatott áramkörtervező eszközök.
A fejlesztőeszközök egyrészt alacsony szintűek, úgy mint a letöltő programok, kódszintű hibakereső programok. Másrészt a fejlesztőeszközök a magas szintű programozási nyelvek, mint a fordítók, forrásszintű debugger programok C, C++, C# compilerek, Eclipse környezet
A fenti feladatok megvalósítását jól illusztrálja a 77 ábrán látható beágyazott járműirányító rendszer. Egy ilyen bonyolult rendszerben többszibntű irányítási feladatokat kell megoldani. Az egyes szintek felsorolásszerűen a következők:
Járműcsoport irányítás
Jármű-környezet kapcsolaton alapuló irányítás
Járműszintű irányítás
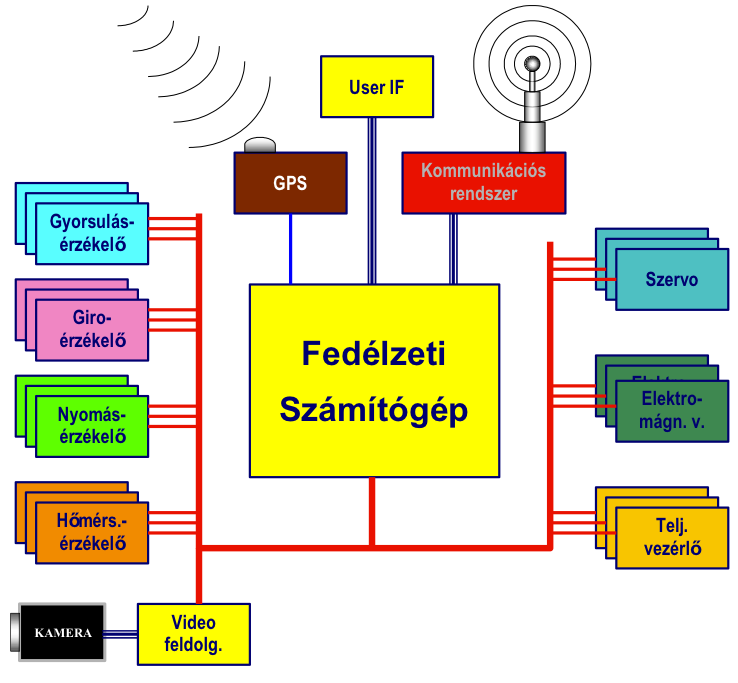
18. fejezet - Irodalomjegyzék
[1] B.D.O. Anderson and J.B. Moore. Linear Optimal Control. Prentice Hall, Englewood Cliffs, New Jersey, 1971.
[2] B.D.O. Anderson and J.B. Moore. Optimal Filtering. Prentice Hall, Englewood Cliffs, New Jersey, 1979.
[3] V.I. Arnold. Mathematical methods of classical mechanics. Springer-Verlag, 1988.
[4] M. Athans and P.L. Falb. Optimal control. McGraw-Hill Book Company, New York, 1966.
[5] G. Balas, J.C. Doyle, K. Glover, A. Packard, and R. Smith.  -analysis and snthesis toolbox. The Mathworks Inc., 1993.
-analysis and snthesis toolbox. The Mathworks Inc., 1993.
[6] M. Blanke, M. Kinnaert, J. Lunze, and M. Staroswiecki. Diagnosis and fault-tolerant control. Springer, 2003.
[7] J. Bokor and G. Balas. Linear parameter varying systems: A geometric theory and applications. 16th IFAC World Congress, Prague, 2005.
[8] J. Bokor and P. Gáspár. Irányítástechnika járműdinamikai alkalmazásokkal. TypoTex Kiadó, 2008.
[9] F. Csáki. Szabályozások dinamikája. Akadémiai Kiadó, Budapest, 1966.
[10] F. Csáki. Fejezetek a szabályozástechnikából. Állapotegyenletek. Akadémiai Kiadó, Budapest, 1973.
[11] R.C. Dorf and R.H. Bishop. Modern Control Systems. Addison-Wesley Publ. Comp.Inc., 1984.
[12] J.S. Freudenberg and D.P. Looze. Frequency domain properties of scalar and multivariable feedback systems. Springer-Verlag, 1988.
[13] A. Isidori. Nonlinear control systems. Springer, 1995.
[14] A. Isidori. Nonlinear control systems II. Springer, 1999.
[15] S.M. Joshi. Control of flexible space structures. Lecture Notes in Control and Information Sciences, Springer-Verlag, 1990.
[16] T. Kailath. Linear systems. Prentice-Hall, Inc., Englewood Cliffs, 1980.
[17] R. Kalman. On the general theory of control systems. Proc. 1st IFAC Congress, Moscow, 1:481--492, 1960.
[18] R.E. Kalman. A new approach to linear filtering and prediction problems. ASME Journal of Basic Engineering, 82D:35--45, 1960.
[19] L. Keviczky. Combined identification and control: Another way. Proc. of the IFAC/IFORS Symposium on Adaptive Control and Signal Processing, Budapest, pages 13--30, 1995.
[20] L. Keviczky, R. Bars, J. Hetthéssy, and Cs. Bányász. Szabályozástechnika. Műegyetemi Kiadó, Budapest, 2006.
[21] L. Keviczky and Cs. Bányász. Iterative identification and control design using K-B parametrization, in: Control and complex systems, eds: K.J. Astrom, P. Albertos, M. Blanke. Springer, London, pages 101--121, 2001.
[22] U. Kiencke and L. Nielsen. Automotive control systems. For engine, driveline and vehicle. Springer, 2000.
[23] B. Lantos. Irányítási rendszerek elmélete és tervezése. Akadémiai Kiadó, Budapest, 2001.
[24] L. Ljung. Parametric methods for identification of transfer functions of linear systems. in Advances in Control, Ed.: C.L. Leondes, Academic Press, New York, 1986.
[25] L. Ljung. System identification: Theory for the user. Prentice-Hall, Inc., Englewood Cliffs, New Jersey, 1987.
[26] Maciejowski. Multivariable Feedback Design. Addison-Wesley, 1989.
[27] D. McLean. Automatic Flight Control Systems. Prentice-Hall, New York, 1990.
[28] N.S. Nise. Control Systems Engineering. The Benjamin Cummings Publ. Comp., Inc., 1995.
[29] K. Ogata. Modern Control Engineering. Prentice-Hall, Englewood Cliffs., London, 1984.
[30] P. Rózsa. Lineáris algebra és alkalmazásai. Tankönyvkiadó, Budapest, 1991.
[31] M. Safonov, A. Laub, and G. Hartmann. Feedback properties of multivariable systems: The role and use of the return difference matrix. IEEE Transactions on Automatic Control, 26(1):47 -- 65, 1981.
[32] S. Sastry. Nonlinear systems: Analysis, stability and control. Springer, 1999.
[33] R. Tuschák. Szabályozástechnika. Műegyetemi Kiadó, Budapest, 1994.
[34] I. Vajk. Identification methods in a unified framework. Automatica, 41:1385--1393, 2005.
[35] T. Vámos and J. Bokor. Bird's eye view on control theory - motion, spaces, transformations. Annual Reviews in Control, 21:1--11, 1997.
[36] G. Zames. Feedback and optimal sensitivy: Model reference transformations, multiplicative seminorms, and approximate inverses. IEEE Transactions on Automatic Control, 26(2):301--320, 1981.