Mechatronikai berendezések tervezése
Szerzői jog © 2014 Dr. Huba Antal, Dr. Aradi Petra, Czmerk András, Dr. Lakatos Béla, Dr. Chován Tibor, Dr. Varga Tamás

A tananyag a TÁMOP-4.1.2.A/1-11/1-2011-0042 azonosító számú „ Mechatronikai mérnök MSc tananyagfejlesztés ” projekt keretében készült. A tananyagfejlesztés az Európai Unió támogatásával és az Európai Szociális Alap társfinanszírozásával valósult meg.

Dr. Huba Antal (1 – 12. és 14. fejezet)
Dr. Aradi Petra (15., 16., 17. fejezet)
Czmerk András (13. és 18. fejezet)
Dr. Lakatos Béla (19. fejezet)
Dr. Chován Tibor (Függelék)
Dr. Varga Tamás (Függelék)
Kézirat lezárva: 2014 február
Lektorálta: Dr. Horváth Péter
További közreműködők: Dr. Korondi Péter, Dr. Lipovszki György, Halas János
A kiadásért felel a(z): BME MOGI
Felelős szerkesztő: BME MOGI
2014
- Bevezető a Mechatronikai rendszerek tervezése című jegyzethez
- 1. A modellezés szerepe a mechatronikai tervezésben
- 2. A mechatronikai modellezés eszköztára
- 3. A hálózati módszerek eszköztára
- 4. Egyszerű példák hálózati és impedancia módszer alkalmazására
- 4.1. Torziós tengely és tárcsa dinamikai modelljei keresztváltozó forrással
- 4.2. Torziós tengely és tárcsa dinamikai modelljei különböző változatokban
- 4.3. Állapottér modell formáinak létrehozása
- 4.4. Impedancia módszer MK meghatározására
- 4.5. Forrás egyenérték számítása
- 4.6. Szuperpozíció elvének alkalmazása több forrás esetén
- Szakirodalom
- 5. Az állapotegyenlet megoldása idő és operátor tartományban
- 6. Szenzorok és aktuátorok dinamikai modelljei és tervezésük
- 6.1. Piezoelektromos gyorsulásérzékelő. Fordító váltó a gyakorlatban.
- 6.2. Pneumatikus és hidraulikus munkahenger. Fordító váltók a gyakorlatban
- 6.3. Egyenáramú szervomotor és tachogenerátor modelljei. Váltók a gyakorlatban
- 6.4. Merülő tekercses lineáris motor konstrukciója. Váltó a gyakorlatban.
- Szakirodalom
- 7. Hajtómű dinamikai modelljei, a mechanikai időállandó kérdése
- 8. DC motor hajtóművel egybeépített modelljei
- 9. Golyósorsós átalakító dinamikai modelljei és tervezése
- 10. Vonóelemes átalakító és dinamikai modelljei és tervezése
- 11. Golyósorsós pozicionáló szakasz tervezése
- 12. Fogazott szíjas lineáris mozgató, mint szakasz méretezése
- 13. Szervopneumatikus rendszer szakaszának modellje
- 13.1. A munkahenger modellezési problémái
- 13.2. A szervopneumatikus pozícionáló rendszer bemutatása
- 13.3. A munkahenger, mint szakasz modellje
- 13.4. A szervopneumatikus rendszer állapottér modellje
- Szakirodalom
- 14. Aktív rezgéscsillapító szakaszának modelljei és a szabályozások tervezése
- 14.1. A rezgéscsillapítás „referencia problémája” és átviteli függvényei
- 14.2. A szemiaktív pneumatikus rezgéscsillapító
- 14.3. Aktív mechatronikai rezgéscsillapító szakaszának tervezése
- 14.4. A dinamikus erő kompenzátor uk(t) bemenő jelének meghatározása
- 14.5. A kompenzáló hatás igazolása kísérleti modellen végzett mérésekkel
- 14.6. Aktív rezgéscsillapító 3D modellje és szabályozása
- Szakirodalom
- 15. CD-fej fókusztávolság szabályozásának tervezése és szimulációja
- 16. Golyósorsós pozícionáló szabályozásának tervezése és szimulációja
- 17. Vonóelemes pozícionáló szabályozásának tervezése és szimulációja
- 18. Szervopneumatikus pozícionáló szabályozásának tervezése és szimulációja
- 19. Módszeres tervezés a mechatronikában
- 19.1. A rendszertervezés természete és metodológiája
- 19.2. Modell-bázisú rendszertervezés
- Szakirodalom
- FÜGGELÉK
- A. Mechatronikai rendszerek hőtani és áramlástani modellezése
- A.1. Bevezetés
- A.2. Bevezetés a CM program használatába
- A.3. Felhasználó által definiált közönséges differenciálegyenlet-rendszer megoldása
- A.4. Hővezetés és hőátadás folyamatok hatásának vizsgálata egy szilárd test hőmérsékletének alakulására
- A.5. Vezetősínben kialakuló hőmérsékleti kép meghatározása (Joule törvény)
- A.6. Mérőperemben kialakuló áramlás vizsgálata
- A.7. Csőszigetelés vastagságának vizsgálata
- A.8. Hőmérő elhelyezés vizsgálata
- 1. A modellalkotás folyamata és problémái
- 2. Hagyományos szabályozókör
- 3. Az állapotszabályozás egyszerű formája
- 1.1. A modellezés folyamat ábrája
- 1.2. Hajtómű egyszerűsített gráf-modellje
- 1.3. A bemeneti oldali paraméterek redukciója
- 1.4. Hajtómű és motorral kapcsolt hajtómű „kifutási görbéi”
- 1.5. Méréssel kapott kifutási görbék
- 1.6. Analóg mechanikai és villamos egytárolós arányos rendszerek
- 1.7. Egytárolós arányos (PT1) tag amplitúdó menete A=1 esetén
- 1.8. Átmeneti függvények összehasonlítása
- 1.9. Az amplitúdó menetek összehasonlítása
- 1.10. A karakterisztikus polinom gyökeinek ábrázolása az s-síkon
- 3.1. Mechanikai súrlódási modellek
- 4.1. Torziós tengely modell-elemei és gráfja
- 4.2. Aktív és passzív részre bontás
- 4.3. Hurkok kijelölése „kaszkád” módon
- 4.4. Aktív és passzív rész szétválasztása
- 4.5. Kiindulási kapcsolás ekvivalens forrás számításához
- 4.6. Rugalmas tengely Föttinger tengelykapcsolóval
- 4.7. A modell impedancia hálózata
- 4.8. Az eredmény felírásához célszerű alakra hozott impedancia kapcsolás
- 4.9. Rugalmas tengely két gerjesztéssel
- 4.10. Impedancia kapcsolás két forrással
- 4.11. Szuperpozíció két forrás esetén
- 5.1. Passzív rezgéscsillapító egyszerű modellje
- 6.1. Piezoelektromos szeizmikus gyorsulásérzékelő modellje és gráfja
- 6.2. Az átviteli függvényhez „vezető” legegyszerűbb kapcsolás
- 6.3. Brüel&Kjaer gyártmányú piezoelektromos gyorsulásérzékelő adatlapja
- 6.4. Hidraulikus munkahenger modellje és gráfja
- 6.5. Hidraulikus munkahenger átmeneti függvénye
- 6.6. Pneumatikus munkahenger gráfja
- 6.7. Pneumatikus munkahenger impedancia hálózata
- 6.8. Az átviteli függvényt adó legegyszerűbb kapcsolás általános impedanciákkal
- 6.9. A legegyszerűbb kapcsoláshoz vezető út részletezése
- 6.10. Balra az aktív, jobbra a passzív rész
- 6.11. A keresztváltozó osztó konkrét impedanciákkal
- 6.12. Pneumatikus munkahenger átmeneti függvénye
- 6.13. DC mikromotor metszete és a forgórész tekercselése (Faulhaber)
- 6.14. Egy DC mikromotor jelleggörbéi (Faulhaber)
- 6.15. DC szervomotor gráfja
- 6.16. A DC szervomotor impedancia hálózata
- 6.17. A keresett Ω kimenet és az Ube forrás közötti kapcsolatot leíró hálózat
- 6.18. CD fej képe és szerkezeti modellje
- 6.19. A CD fejben található rugalmas vezeték elemei
- 6.20. A rugalmas vezeték főmozgásának két szélső pozíciója
- 6.21. A CD fej gráfja
- 6.22. A CD fej impedancia hálózata
- 6.23. Egyszerűsített kapcsolás az átviteli függvény felírásához
- 7.1. Méréssel felvett kifutási görbék
- 7.2. Az időállandó szerepe mechanikai rendszerekben (ld.: 1.3. fejezet)
- 7.3. A pillanatnyi fogsúrlódás mérése (Benedict & Kelley)
- 7.4. Dinamikus fogterhelés mérése (Rebbechi)
- 7.5. Dinamikus normál és súrlódási erő mérése fogaknál (Rebbechi)
- 7.6. Érintkező evolvens fogazat geometriája (Keresztes)
- 7.7. Valós hajtómű gráfja csapágyazási és fogsúrlódási veszteségekkel
- 7.8. A valós hajtómű egyszerűsített gráfja
- 7.9. A valós hajtómű impedancia hálózata
- 7.10. A kotyogás egy lehetséges modellje (Bögelsack), (Reiner)
- 8.1. DC motorral egybeépített hajtómű gráfja
- 8.2. DC motorral egybeépített hajtómű impedancia hálózata
- 8.3. Az átviteli függvényhez vezető egyszerűsített kapcsolás
- 8.4. A kiindulásként szolgáló impedancia hálózat induktivitás nélkül
- 8.5. Kapcsolás, amely az összevont mechanikai oldalt mutatja
- 8.6. Az egységesen mechanikai impedanciákat tartalmazó kapcsolás
- 8.7. Aktív és passzív részre szétválasztott kapcsolás
- 8.8. A négytárolós változat aktív és passzív része
- 8.9. Motor, visszahatásos hajtómű és golyósorsós átalakító
- 8.10. Motor, visszahatásos hajtómű és golyósorsós átalakító („teljes hálózat”) vázlatos impedanciahálózata
- 8.11. „Hajtó rendszer” és „hajtott rendszer” vázlatos impedanciahálózata
- 9.1. Két végén csapágyazott golyósorsó szerkezeti vázlata
- 9.2. A váltó állandójának meghatározása
- 9.3. A katalógusokban közölt rugómerevség eredőhöz tartozó gráf
- 9.4. Vázlat, amely a golyósorsó szakaszként való beépítettségét mutatja
- 9.5. A golyósorsós szakasz gráfja, amely a valós helyzetet tükrözi
- 9.6. A szakasz gráfja az összevonások után
- 9.7. A gráftól az impedancia kapcsolásig vezető út lépései
- 10.1. A vonóelemes hajtások áttekintése [10.1.]
- 10.2. Fogazott szíjas hajtás sokoldalú kialakítása [10.1.]
- 10.3. Módosítást megvalósító vonóelemes robothajtás
- 10.4. Vonóelemes átalakító általános vázlata
- 10.5. A vonóelemes átalakító gráfja terhelt és terheletlen ággal
- 10.6. Vonóelemes átalakító eredő merevséggel
- 10.7. Az átviteli függvény alapját képező impedancia kapcsolás
- 10.8. Speciális, kétkoordinátás mozgatás fogazott szíjjal
- 10.9. Vonóelemes lineáris mozgató felépítésének vázlata
- 10.10. Vonóelemes lineáris mozgató gráfja
- 10.11. A forgató tárcsa fogai által okozott feszültség a fogazott szíjban (VEM) [10.1.]
- 10.12. Lineáris mozgatók (pozícionálók)
- 10.13. Lineáris mozgató, mint szakasz gráfja
- 10.14. Vonóelemes mozgató impedancia hálózata
- 10.15. A szakasz legegyszerűbb modell formája
- 11.1. Golyósorsós pozícionáló, mint szakasz vázlata
- 11.2. Golyósorsós szakasz gráfja
- 11.3. A golyósorsós mozgás-átalakító impedancia hálózata
- 11.4. Egyenértékű transzlációs impedancia hálózat az átviteli függvény felírásához
- 12.1. Fogazott szíjas lineáris mozgatók legismertebb elrendezései [10.1.]
- 12.2. Vonóelemes pozicionáló szakaszának vázlata
- 12.3. Jellegzetes fogazott szíj profilok
- 12.4. Korszerű program fogazott szíjas mozgatás tervezéséhez [12.1.]
- 12.5. Az előfeszítés hatása a fogazott tárcsánál [10.1.]
- 12.6. DC motor hajtóművel és a vonóelemes mozgatás gráfja (szakasz)
- 12.7. A szíj fogazott kerékre való felfekvéséből származó hiba [10.1]
- 12.8. Vonóelemes pozícionáló hibái
- 12.9. Mozgatás „balra” (tárcsa pozitív forgásirányban), kiindulási helyzet
- 12.10. Mozgatás „balra”, véghelyzet
- 12.11. Mozgatás „jobbra” (tárcsa negatív forgásirányban), kiindulási helyzet
- 12.12. Mozgatás „jobbra”, véghelyzet
- 12.13. A szíj rugómerevségének változása az igénybevétel függvényében
- 12.14. A szíj rúgómerevségének változása a mozgatott tömeg pozíciójának függvényében
- 12.15. A nemlineáris vonóelemes átalakító gráfja
- 13.1. A rendszer felépítése a figyelembe vett fizikai jellemzőkkel
- 13.2. Dugattyúrúd nélküli munkahenger felépítése [13.4.]
- 13.3. A rendszer felépítése a figyelembe vett fizikai jellemzőkkel
- 13.4. Stribeck súrlódási modell - súrlódó erő a sebesség függvényében
- 13.5. Pneumatikus tartály (kapacitás), állapotváltozókkal
- 13.6. Átömlési tényező Ψ(f),f=p2/p1 ; (κ=1.4) esetén
- 13.7. Valós átömlési tényező Ψ, és a közelítő függvénye Ψ’; pkrit =0,5; κ=1,4
- 13.8. Szelep modell, tömegáramokkal
- 14.1. Szemiaktív rezgéscsillapító rendszer részei
- 14.2. Az ultraprecíziós berendezésekre ható gerjesztések
- 14.3. A rezgéscsillapítók legegyszerűbb modelljei
- 14.4. A passzív és szemiaktív rezgéscsillapítás modellje helyes referencia választással
- 14.5. Különféle szemiaktív rezgéscsillapító gyártmányok frekvenciamenete
- 14.6. Szemiaktív pneumatikus rezgéscsillapító lábazat rajza (katalógusból)
- 14.7. Szemiaktív pneumatikus rezgéscsillapító láb szerkezeti vázlata
- 14.8. Szemiaktív pneumatikus rezgéscsillapító gráfja
- 14.9. A szabályozható fojtószelep működése és a szelep karakterisztika
- 14.10. A fordító váltó pneumatikus részének működése
- 14.11. A szemiaktív szabályozás állapottér modelljének jelfolyamgráfja
- 14.12. Helyzetszabályozás nélküli rezgéscsillapító állapottér modellje gráfon
- 14.13. Kompenzáló erővel aktívvá tett rezgéscsillapító gráfja
- 14.14. Aktív rezgéscsillapító rendszerterve
- 14.15. Aktív rezgéscsillapító szerkezeti elemei
- 14.16. Aktív rezgéscsillapító struktúra gráfja
- 14.17. Mozgási viszonyok a lineáris motorban
- 14.18. Az állapottér modell alapján felrajzolt jelfolyam gráf
- 14.19. Kompenzáló tag a jelfolyamban
- 14.20. Függőleges mozgást végző aktív rendszer hatásvázlata
- 14.21. Kísérleti modellen végzett mérések eredményei
- 14.22. Kompenzáló tag bekapcsolása a kísérleti modellen
- 14.23. Kompenzáló tag mért hatása alacsony frekvenciákon
- 14.24. Koordináták és változók a védett asztalon
- 14.25. Aktív rezgéscsillapító 3D-s gráfja
- 14.26. Szimulált sebesség függvények
- 14.27. Szimulált mozgások 3D-ben
- 15.1. A villamos rész modellje elsőrendű soros RL-kör
- 15.2. A mechanikai rész modellje másodrendű tömeg-rugó-csillapítás rendszer
- 15.3. Az összekapcsolt villamos és mechanikai rendszer struktúragráfja
- 15.4. A szimbolikus átviteli függvény megadása LabVIEW „programunk” (CD-fej.vi) előlapján
- 15.5. A szimbolikus átviteli függvényt létrehozó, „készen kapott” programrészlet
- 15.6. Az átviteli függvényből idő- és frekvenciatartománybeli diagramokat rajzoló és a pólusok numerikus adatait szolgáltató Control Design Module beépített VI-ok
- 15.7. Az átviteli függvény alapján rajzolt átmeneti függvény és pólus-zérus térkép, valamint a pólusok adatai (csillapítási tényezők, sajátfrekvenciák és komplex számsíkbeli koordináták)
- 15.8. Az átviteli függvény alapján rajzolt Bode-diagrampár és Nyquist-diagram
- 15.9. Az eredeti harmadrendű és az elhanyagolás után másodrendű rendszer átviteli függvénye a pólusok adataival (csillapítási tényezők, sajátfrekvenciák és koordináták)
- 15.10. Az eredeti harmadrendű és az elhanyagolás után másodrendű rendszer átmeneti függvénye és különbségük
- 15.11. Az eredeti harmadrendű és az elhanyagolás után másodrendű rendszer frekvenciatartománybeli ábrázolásai (Bode-diagrampár és Nyquist-diagram)
- 15.12. A másodrendű szakasz és egységnyi erősítésű arányos szabályozó: átviteli függvények
- 15.13. A másodrendű szakasz és egységnyi erősítésű arányos szabályozó: diagramok
- 15.14. A másodrendű szakasz és a szakasz pólusait kompenzáló másodfokú zérus polinommal adott, pólust nem tartalmazó szabályozó: átviteli függvények
- 15.15. A másodrendű szakasz és a szakasz pólusait kompenzáló másodfokú zérus polinommal adott, pólust nem tartalmazó szabályozó:diagramok
- 15.16. A másodrendű szakasz és a szakasz pólusait „kedvezőbbel” helyettesítő szabályozó: átviteli függvények
- 15.17. A másodrendű szakasz és a szakasz pólusait „kedvezőbbel” helyettesítő szabályozó: diagramok
- 16.1. A rendszer felépítése a figyelembe vett fizikai jellemzőkkel
- 16.2. A rendszer vázlata alapján készített struktúragráf
- 16.3. A két alrendszer egyszerűsített impedancia modellje
- 16.4. A hajtó alrendszer elhanyagolás nélküli impedanciahálózat modellje
- 16.5. A hajtó alrendszer elhanyagolás és összevonás utáni impedanciahálózat modellje
- 16.6. A hajtó alrendszer egyszerűsített és mechanikai szögsebesség osztóként előállított impedancia hálózat modellje
- 16.7. A hajtott alrendszer struktúragráf modellje
- 16.8. Az átviteli függvény előállítása a hajtó rendszer+hajtómű G1(s)*Gi(s) és a hajtott rendszer G2(s) szimbolikusan adott átviteli függvényének soros eredőjeként
- 16.9. Az átviteli függvény szimbolikus megadása a sebesség-elmozdulás átalakításhoz szükséges integrátorral („szakasz integrálással” átviteli függvény számítása)
- 16.10. A „szakasz integrálással” átmeneti- és súlyfüggvénye és a zérus-pólus térkép a pólusok paramétereivel (csillapítási tényezők, sajátfrekvenciák és komplex számsíkbeli koordináták)
- 16.11. A „szakasz integrálással” Bode-diagrampárja és Nyquist-diagramja
- 16.12. Az integrálás figyelembe vétele a szakasz átviteli függvényében az előlapi („”Integráló tag?) gomb logikai értéke alapján
- 16.13. A szakasz (integrálás nélküli) átviteli függvény adatai
- 16.14. A szakasz (integrálás nélküli) jellegzetes időfüggvényei és pólusai
- 16.15. A szakasz (integrálás nélküli) frekvenciatartománybeli leképezései
- 16.16. G1 egyetlen és G2 két valós pólusának (és ebből az időállandó) számítása, majd a pólusoknak megfelelő időállandójú egységnyi erősítésű egytárolós arányos tagok előállítása ZPK modellként
- 16.17. A harmadrendű szakasz három jellemző időállandójának megfelelő, egységnyi erősítésűnek választott elsőrendű rendszer átmeneti függvénye
- 16.18. A harmadrendű szakasz, a másodrendű közelítés és az elhagyott elsőrendű rész átmeneti függvénye
- 16.19. A harmadrendű szakasz időállandóinak megfelelő három elsőrendű tag Bode-diagramja
- 16.20. A „gyors” pólus elhanyagolását megvalósító LabVIEW programrészlet
- 16.21. A „gyors” pólus elhanyagolása és a kapott átmeneti függvény a kiindulási harmadrendűhöz hasonlítva
- 16.22. A másodrendű szakasz és egységnyi erősítésű arányos szabályozó: átviteli függvények
- 16.23. A másodrendű szakasz és egységnyi erősítésű arányos szabályozó: frekvenciatartománybeli diagramok (szakasz, szabályozó és felnyitott kör Bode-diagram, felnyitott kör Nyquist-diagram)
- 16.24. A másodrendű szakasz és egységnyi erősítésű arányos szabályozó: tartalékok ábrázolása a felnyitott kör Bode-diagramján, a zárt kör átmeneti függvénye, valamint a szakasz és a zárt kör pólusai
- 16.25. A másodrendű szakasz és százszoros erősítésű arányos szabályozó: tartalékok ábrázolása a felnyitott kör Bode-diagramján, a zárt kör átmeneti függvénye, valamint a szakasz és a zárt kör pólusai
- 16.26. A másodrendű szakasz és tízezerszeres erősítésű arányos szabályozó: tartalékok ábrázolása a felnyitott kör Bode-diagramján, a zárt kör átmeneti függvénye, valamint a szakasz és a zárt kör pólusai
- 16.27. A másodrendű szakasz és kétmilliószoros erősítésű arányos szabályozó: tartalékok ábrázolása a felnyitott kör Bode-diagramján, a zárt kör átmeneti függvénye, valamint a szakasz és a zárt kör pólusai
- 16.28. A másodrendű szakasz PD-jellegű töréspontáthelyezővel (Ac=2*106 és TB=0,0005): szakasz, szabályozó és felnyitott kör Bode-diagram
- 16.29. A másodrendű szakasz PD-jellegű töréspontáthelyezővel (Ac=2*106 és TB=0,0005): tartalékok ábrázolása a felnyitott kör Bode-diagramján, a zárt kör átmeneti függvénye, valamint a szakasz és a zárt kör pólusai
- 16.30. A szakasz nullától különböző pólusait kompenzáló másodrendű zérus polinommal adott szabályozó: átviteli függvények
- 16.31. A másodrendű szakasz és a szakasz pólusait kompenzáló másodrendű zérus polinommal adott szabályozó: szakasz, szabályozó és felnyitott kör Bode-diagram
- 16.32. A másodrendű szakasz kettős töréspontáthelyezővel: szakasz, szabályozó és felnyitott kör Bode-diagram
- 16.33. A másodrendű szakasz kettős töréspontáthelyezővel: tartalékok ábrázolása a felnyitott kör Bode-diagramján, a zárt kör átmeneti függvénye, valamint a szakasz és a zárt kör pólusai
- 17.1. A rendszer felépítése a figyelembe vett fizikai jellemzőkkel
- 17.2. A rendszer vázlata alapján készített struktúragráf
- 17.3. Az első egyszerűsítés eredménye: induktivitás elhanyagolása és transzlációs rugalmasság összevonása
- 17.4. Második egyszerűsítés: a kis tehetetlenségi nyomatékú szíjtárcsák elhagyása
- 17.5. Motor-hajtómű egység és vonóelemes mozgatás részrendszere
- 17.6. A hajtott részrendszer, a hajtó részrendszert sebesség-forrással helyettesítve
- 17.7. Az átviteli függvény együttható formulákat „számító” wxMaxima programrészlet és a Jegyzettömbbe másolt paraméteres összefüggések
- 17.8. LabVIEW-ban számított átviteli függvény, integrálás nélkül, valamint a pólus-zérus térkép a pólusok adataival
- 17.9. Szakasz átmeneti függvénye és súlyfüggvénye, Bode- és Nyquist diagramja
- 17.10. Szakasz a negatív visszacsatolású szabályozási körben egyelőre szabályozó nélkül
- 17.11. Szakasz a negatív visszacsatolású szabályozási körben egyelőre szabályozó nélkül, frekvenciatartománybeli diagramok
- 17.12. Tartalékok a szabályozási körben, valamint a zárt kör átmeneti függvénye egységnyi arányos szabályozóval
- 17.13. A szabályozó egy lehetséges – szükség szerint tovább hangolható – beállítása
- 17.14. A szabályozó egy lehetséges – szükség szerint tovább hangolható – beállításából számított frekvenciatartománybeli diagramok
- 17.15. A szabályozó egy lehetséges – szükség szerint tovább hangolható – beállításából számított és ábrázolt tartalékok, valamint a zárt kör átmeneti függvénye
- 17.16. A pozíciótól függő rugalmasságot tartalmazó struktúragráf
- 17.17. A pozíciótól függő rugalmasságot tartalmazó struktúragráf, a hajtó részrendszert szögsebesség forrással helyettesítve
- 17.18. A pozíciótól függő rugalmasságot tartalmazó redukált struktúragráf az állapottér modell felírásához
- 17.19. Az integrálás nélküli, linearizált állapottér modellel adott szakasz vizsgálata
- 17.20. Az integrálás nélküli, linearizált állapottér modell eredeti pólusai és a kívánt póluseloszlás
- 17.21. Az integrálás nélküli, linearizált állapottér modellel adott szakasz vizsgálata
- 17.22. Az állapotvisszacsatolás paramétereit számító LabVIEW programrészlet
- 17.23. A zárt kör átmeneti függvénye és pólustérképe a felnyitott kör (és a kompenzálatlan IT3 szakasz) Bode diagramjával, valamint a tartalékokkal
- 17.24. A zárt kör átmeneti függvényét számító „blokkdiagram” vagy hatásvázlat a Control & Simulation Loop felhasználásával
- 17.25. A zárt kör átmeneti függvénye a Control & Simulation Loop felhasználásával
- 17.26. A nemlineáris szakasz állapottér modellel adott szabályozási kör szimulációs modellje
- 17.27. A nemlineáris szimuláció futás közbeni pillanatfelvétele a korábbi (azonos körülmények közötti) futtatás XY Graph eredményével
- 17.28. Az állapottér modell, az állapotváltozók, a kimenő jel és az állapotvisszacsatolás paramétereinek időbeli alakulása
- 18.1. Eltérő paraméterű PID szabályozók pozícióbeállásai és beavatkozó jelei (1)
- 18.2. PID szabályozók hibajelei (1)
- 18.3. Hiba nagysága kinagyítva (1)
- 18.4. Eltérő paraméterű PID szabályozók pozícióbeállásai és beavatkozó jelei (2)
- 18.5. PID szabályozók hibajelei (2)
- 18.6. Hiba nagysága kinagyítva (2)
- 18.7. PID szabályozó viselkedése terhelés hatására
- 19.1. Rendszer és környezete
- 19.2. Egy mechatronikai rendszer nagyvonalú struktúrája
- 19.3. A tervezési variánsok halmazának szűkítése a korlátozások alkalmazásával
- 19.4. A tervezési probléma iterációs megoldása
- 19.5. A tervezési feladat szerkezete
- 19.6. A tervezési fázisai nagyrendszer, vagy technológiai hálózat esetén
- 19.7. A tervezés fázisai egyszerű rendszer, mint gyártandó termék esetén
- 19.8. A többszintű tervezés szerkezete
- 19.9. Egy technológiai hálózat szerkezeti gráfja
- 19.10. Az összetett rendszerek egyszerű szekvenciális számításához
- 19.11. A hálózatok iterációs szekvenciális számításához
- 19.12. A hálózatok iterációs szekvenciális számításához
- 19.13. Egy egyenáramú motor strukturális vázlata
- 19.14. Az állandó mágneses és külső gerjesztésű DC motorok lineáris karakterisztikái
- 19.15. A mellékáramkörű egyenáramú motor kapcsolási vázlata
- 19.16. A mellékáramkörű egyenáramú motorok indítása változtatható ellenállás-sorral
- 19.17. A lineáris elektromechanikai erőgép vázlatos képe
- 19.18. A légrés fluxusának változása az áramerősség és légrés magassága függvényében
- 19.19. A 19.17. ábra mágneses rendszerének helyettesítő sémája
- 19.20. A rendszer feszültség-légrés karakterisztikája
- A.1. COMSOL Multiphysics kezelőfelülete
- A.2. A leképezett differenciálegyenlet-rendszer a Lorenz egyenletek esetén
- A.3. A felvett paraméterek a Lorenz egyenletek esetén
- A.4. A szimulációs idő megadás /100 s-ig végezzük a számítást (STOP) és 0,1 s-ként szeretnénk eredményeket kapni (STEP)/
- A.5. Az állapotváltozók időbeli alakulása a Lorenz egyenletek esetén
- A.6. x-y és x-z fázisdiagramok a Lorenz egyenletek esetén
- A.7. A vizsgált szilárd test keresztmetszeti képe
- A.8. CM programban létrehozott geometriai modell a hővezetés és hőátadás folyamatának vizsgálatához
- A.9. A kialakuló stacioner hőmérsékleti kép
- A.10. Az átlaghőmérséklet időbeli alakulása
- A.11. Példa vezetősín alkalmazására
- A.12. A vizsgált vezetősín főbb méretei
- A.13. A számított stacioner hőmérsékleti kép a vezetősín esetén
- A.14. A CM-ben leképezett mérőperem
- A.15. A kapott eredmények, a sebességi mező a mérőperem esetében (2D hengerszimmetrikus, 3D reprezentáció)
- A.16. A parametrikus megoldó megoldása
- A.17. Vonalas metszet ábrázolása a mérőperem metszetében
- A.18. Az alkalmazott peremfeltételek
- A.19. A Felületi integrált hőmérséklet szigetelő falvastagság függése
- A.20. A modellezett geometria
- A.21. Az áramlási és hőmérsékleti kép
- A.22. Hőmérsékletkülönbség a csőkönyökben (K)
- 1.1. A matematikai modellek összefoglalása
- 1.2. A dinamikai modellek áttekintő táblázata
- 2.1. Változók származtatása
- 3.1. Átmenő és keresztváltozók közötti összefüggések a passzív elemeken
- 6.1. A gépészetre jellemző mennyiségek és a mérésükre alkalmas szenzorok
- 6.2. Lineáris motorok jellemző tulajdonságai
- 6.3. Jellegzetes mechatronikai hajtások összehasonlítása
- 12.1. Fogazott szíjak méretei és alkalmazások
- 12.2. Az előfeszítési erő hatása
- 12.3. A fogazott szíjas pozicionálás hibaforrásai [12.2.]
- 12.4. A vonóelemes pozícionálás statisztikai jellemzői
- 12.5. A pozícionáló hossztól és mozgatási iránytól függő rugómerevségei
- 12.6. Szíjágak rugómerevségének változása
- 15.1. Az átviteli függvény számításához használt értékek
- 16.1. Az átviteli függvény számításához használt értékek
- 16.2. Az integráló hatás nélküli szakasz átviteli függvény pólusai és a megfelelő időállandók
- 17.1. A hajtó részrendszer átviteli függvény számításához használt értékek
- 17.2. A hajtott részrendszer átviteli függvény számításához használt értékek
- 17.3. A hajtó részrendszer átviteli függvény számításához használt értékek (a 12. fejezetből)
- 17.4. A hajtott részrendszer átviteli függvény számításához használt értékek (a 12. fejezetből)
- 18.1. PID szabályozókhoz használt paraméterek (1)
- 18.2. PID szabályozókhoz használt paraméterek (2)
- A.1. Peremfeltételek a hővezetés és hőátadás folyamatának vizsgálatához
- A.2. Geometriai paraméterek a hővezetés és hőátadás folyamatának vizsgálatához
- A.3. A hőmérleghez a programban rögzítendő peremfeltételek, azok tulajdonságai és a hozzárendelendő peremek azonosítói
- A.4. Az átlagos stacioner hőmérséklet számítása
- A.5. Az átlagos hőmérséklet időbeli alakulásának számítása
- A.6. A csavarokat szimbolizáló hengerek paraméterei
- A.7. Az alkalmazott peremfeltételek
- A.8. A geometria paraméterei
- A.9. Az alkalmazott peremfeltételek
Bevezető a Mechatronikai rendszerek tervezése című jegyzethez
A „Mechatronikai rendszerek tervezése” című elektronikus jegyzet írói nem vállalkozhattak arra, hogy a mechatronika szerteágazó szakterületének egészét bemutassák. A cím arra utal, hogy a tervezés első, és éppen ezért kritikus, döntő szakaszában folyó munkához szándékozunk módszereket adni és bemutatni, valamint egymással összehasonlítani.
A jegyzet természetesen tartalmaz néhány teljes tervezési folyamatot komplex mechatronikai rendszerekre is – ilyen a mechatronikus rezgéscsillapító – de döntően a szabályozott szakasz, az aktuátorok és a szenzorok modellezése és tervezése a tárgya.
A jegyzet tehát nem szabályozástechnikai, hanem mechatronikai, és ezért bizonyos fokú szabályozástechnikai ismereteket feltételez az olvasótól. A szabályozott szakaszok célorientált modelljének megalkotása a mechatronikai tervezés döntő fázisa. A szerzők feltételezik, hogy az olvasó jártas az alapvető szabályozástechnikai ismeretek terén, ismeri a kaszkád kanonikus szabályozásokat, az analóg és diszkrét szabályozók tervezését és a szabályozókörök behangolását. Ismeri az állapotszabályozás analóg és diszkrét formáját. A szerzők ismételten hangsúlyozni kívánják, hogy a jegyzetük nem irányítástechnikai oktatóanyag, erre a célra számos tankönyv, monográfia, jegyzet áll rendelkezésre.
Az olvasó előtt bizonyára ismeretes, hogy az irányítástechnikai szakirodalomban igen gyakran találhatók olyan szófordulatok, miszerint „adott egy szakasz átviteli függvénye”, vagy „adott a szakasz állapotegyenlete”. Ezt követően indul a szabályozás tervezése. Ez nem is lehet másként, hiszen e munkák nem a szakaszok tervezésével, modellezéssel, hanem a szabályozásokkal foglalkoznak. Szerzőik feltételezik, hogy az olvasók a mechanikai, hőtani, elektrotechnikai stb. szakismereteik alapján képesek megalkotni bármilyen műszaki rendszer éppen aktuális matematikai modelljét. E jegyzet ebben kíván segíteni, és célja az, hogy az olvasó képes legyen összetett mechatronikai szabályozott szakaszok tervezésére és modellezésére önállóan is. Legyen tisztában azzal, hogy az előbb említett munkákban szereplő szakasz modelleket (átviteli függvények, állapottér modellek) miként lehet a célkitűzéseknek megfelelő pontossággal megalkotni.
Az olvasó legyen tisztában azzal, hogy minden modellezési folyamat többé-kevésbé tökéletlen eredményt szolgáltat. Ugyanakkor a befektetett modellezési munkának azonban mindig arányban kell lennie a célkitűzéssel. Túlzott részletességgel, vagy felületesen és elnagyoltan megalkotott modell egyaránt hibás eredményhez vezethet.
A következőkben néhány gondolatot átveszünk a Méréselmélet című TÁMOP jegyzetből, amelynek egyik szerzője, Huba A. azonos e mechatronikai jegyzet egyik írójával. A munka minőségét illetően ugyanis, a modellezés a méréstechnikában is kifejezetten döntő fázis, tehát célszerű a bevezetőben az ott leírtakra az olvasó figyelmét felhívni.
A modern rendszerszemlélet kialakulásával összefüggésben, az 1960-as évektől kezdődően, alig találunk olyan mértékadó méréselméleti, vagy rendszertechnikai és irányításelméleti szakirodalmat, amelyben a megismerési tevékenység középpontjában ne a modellalkotás állana. A mérés és modellezés elválaszthatatlanságának két fejezetet szenteltek a szerzők az idézett munkában. A modellezés fontosságát jelzi, hogy a metrológiában (méréstudomány) már magának a mérésnek is legalább négy modellje ismert és használatos, amelyekkel magát a mérési tevékenységet kísérlik meg leírni.
A „mi megközelítésünk” – tekintettel arra, hogy a szerzők mérnökök, valamint a jegyzet mérnökhallgatók számára készült, természetesen alapvetően mérnöki. A mérnökök vagy kutató tevékenységet végeznek, vagy az ipari termelésben vesznek részt, termékeket és gyártórendszereket terveznek, és a termelést irányítják. A mérés négy modellje közül az egyik az un. „folyamat modell”, a legszemléletesebben mutatja be azt, hogy a mérnöki tevékenység, különösképpen pedig a mérés, tudományos síkon a bennünket körülvevő „világ megismerésére” szolgál, ipari szinten pedig a minőségbiztosítás elengedhetetlen eszköze.
A modellezés és a mérés elválaszthatatlanok, mert a megalkotott modell minőségének ellenőrzése mindenképpen méréssel kell, hogy történjen, kivételes esetekben elégedhetünk csak meg a szimulációval.
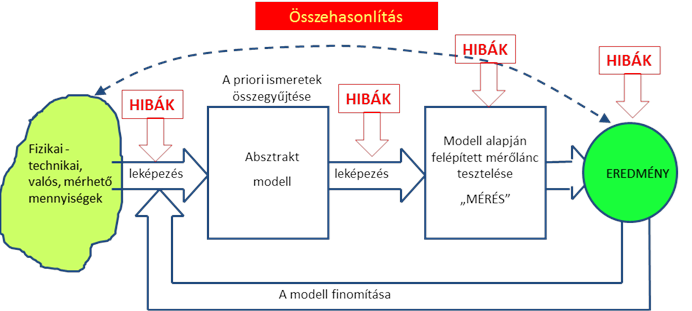
A modellezés folyamatát bemutató ábrával – módosított formában – találkozunk még a modellezéssel foglalkozó fejezetben is, a kettőt együtt érdemes átgondolni.
A fenti ábrán a modellezni kívánt rendszert, a rendszer működését leíró mennyiségek halmazát, továbbá a lánc végén megjelenő eredményt eltérő színnel és formával jelöltük. Ezzel kívánjuk kifejezésre juttatni, hogy a fizikai technikai valóság teljes körű megismerése legfeljebb elméletben lehetséges, hiszen belátható, hogy a jellemzőkre és a mérési-megismerési tevékenységre ható, és azokat befolyásoló tényezők száma végtelenül nagy. Valamennyi befolyásoló tényező gyakorlati megismerésére nincsenek eszközeink, de nem is lenne gazdaságilag indokolható minden hatótényező figyelembe vétele. Ezért minden eredmény leegyszerűsített, és valamilyen „pontossági szintű” – helyesebben hibákkal terhelt – modellje a valóságnak.
Érdemes kiemelni azt is, hogy az ábrán a hibák eredete is nyomon követhető.
A bennünket körülvevő világ mérnöki szempontból megismerni kívánt töredék részét, a jelenségek közötti kapcsolatokat modellek segítségével kíséreljük meg leírni. A modellek nagyvonalakban három kategóriába sorolhatók: fizikai, esetleg kémiai modellek, funkcionális modellek és matematikai (absztrakt) modellek.
A műszaki életben manapság használatos modellezési alapokat 1975-ben megjelent, „General Systems Theory. Matematical Foundation.” (Academic Press, New York, 1975.) művükben M. D. Mesarovic és Y. Takahara fektették le.
A fizikai modellek általános alkalmazása főként régebbi időkben volt elterjedt, ugyanakkor még ma is nélkülözhetetlenek az áramlástechnikai vizsgálatok esetében a kicsinyített, hasonlóság alapján megalkotott modellek. Ugyanakkor összetett mechanikai lengő rendszerek dinamikai vizsgálatának céljából már csak elvétve találkozhatunk analóg villamos áramkörökkel, hiszen a szilárdsági és dinamikai analízis területén szinte egyeduralkodóvá vált a végeselem módszer.
A funkcionális modellek mind a mai napig általánosan elterjedtek a mechanikában, valamint a mérés- és szabályozástechnikában. Ebben az esetben a vizsgálat alá vett rendszert felépítő elemeket idealizált szerepük alapján jelenítjük meg. Minden, alapozó mérnöki ismeretekkel rendelkező szakember tudja, hogy egy rugalmas szerkezeti elem sokféleképpen írható le, de a az ideálist leginkább közelítő változat az, ha helyette egy rugót jelenítünk meg. Azonban sem a fémek, sem a műanyagok viselkedésének pontosabb leírása nem lehetséges egy ilyen módon. Fémeket minimálisan egy rugó és egy csillapítás párhuzamos kapcsolásával szokás modellezni (Kelvin-modell), de relaxációt és kúszást mutató, nemlineáris tulajdonságú elasztomerek esetében – bizonyos követelmények mellett – még ez a forma sem lenne elegendő.
A matematikai modellek absztrakciós lépések eredményeként jönnek létre. Ezeknek napjainkban kiemelt szerepük van, ami a számítástechnika fejlettségének köszönhető. A vizsgált rendszerekben a mérhető és nem mérhető mennyiségeket változók formájában jelenítjük meg, a rendszerre jellemző műszaki tulajdonságokat paraméterek (ezek állandóak és változóak lehetnek) formájában írjuk le. Tudjuk alapozó ismereteink alapján, hogy időben változó mennyiségek villamos jellé történő átalakítása és mérése nélkül bármely mechatronikai rendszer elképzelhetetlen, ezért a méréstechnika kiemelt fontossággal bír a mechatronikában.
A mechatronikai rendszerek megtervezéséhez elengedhetetlen a négy matematikai modell-típus ismerete.
Ezek
a differenciálegyenlet (idő tartomány, dinamika, jelkövetés vizsgálata)
az átviteli függvény (operátor, vagy frekvencia tartomány, stabilitás vizsgálata)
az állapottér modell (idő és operátor tartomány)
és speciális esetekben a logikai függvények.
Mihez szükségesek ezek a modellek?
A válasz egyszerű. Ahhoz, hogy a szabályozott szakasz kimenőjele(i) az előírt módon viselkedjenek, a tervezés első lépésében meg kell ismerni a szakasz dinamikai tulajdonságait. A szabályozókör többi tagját ennek adottságaihoz kell illeszteni. A szakaszok nehezen, legalább is nem minden esetben tipizálhatóak, de ugyanakkor kereskedelmi forgalomban kaphatóak a szabályozókör egyéb tagjai, így a mérést végző visszacsatoló tagok és a szabályozók. Gyakran találkozunk hazai és külföldi szabályozástechnikai szakirodalomban azzal, hogy a szerző ismertnek feltételezi a szakasz modelljét, és a szabályozás tervezését valamelyik matematikai modellformából „indítja”. Következő, és hasonló fordulatokat olvashatunk: „Ismert a szabályozott szakasz átviteli függvénye”. Vagy: „Adott a szakasz állapottér modellje”. A jegyzettel ahhoz szeretnénk segítséget nyújtani, hogy „váratlan”, a szokványos modellekkel le nem írható vegyes, komplex rendszerekkel való találkozás esetében is rendelkezzen az olvasó elegendő „munícióval” az adekvát matematikai modell megalkotásához.
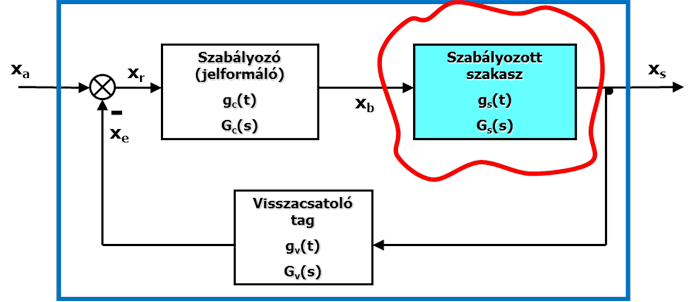
A témához csak két „rajzos” kiegészítést fűzünk. Az egyiken a hagyományos szabályozókört, a másikon az állapotszabályozás egyszerű formáját látjuk. Minkét esetben körvonalaztuk azt a részt, amely rész dinamikai viselkedésének ismerete a kör megtervezésének elengedhetetlen feltétele.
A „tervezés” alatt optimális dinamikával és pontossággal, valamint stabilan működő szabályozókör tervezését értjük.
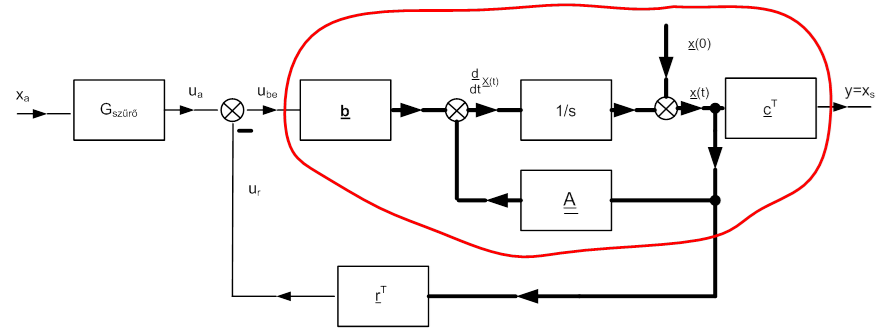
A (3. ábra) ábrán vastagított vonallal a jel-vektorok haladásának irányát jelöltük. Ebben az állapotszabályozásban egy alapjel és egy szabályozott jel van.
Ismeretes talán az is, hogy „mechatronikai rendszerek” alatt nem csak komplett szabályozásokat értünk, hanem a szabályozások egyes „építőköveit”, így az aktuátorokat és a szenzorokat is. Ezért ebben a jegyzetben az aktuátorok és szenzorok dinamikai modelljeivel és tervezésükkel foglalkozó fejezetek megelőzik a jellegzetes szakaszok tervezésével foglalkozó fejezeteket. A szabályozások tervezése és szimulációja sorrendben ezeket követi. A jegyzetet a mechatronika tervezési módszertanával foglalkozó, összefoglaló jellegű fejezet zárja.
Bizonyos mértékű gyakorlati tapasztalattal rendelkezők számára nem szükséges bizonygatnunk, hogy a modell soha nem képes a valóságot teljes komplexitásában leírni. Mindig annak egy részét, vagy bizonyos aspektusait ragadjuk ki, esetenként leegyszerűsítjük a valóságot. A jelenségekről alkotott fizikai elképzeléseink korlátozottak, sok a bizonytalansági forrás. A modell mindig célorientált. Bonyolultságát a megoldandó feladat jellege, a műszaki feltételek, az ésszerűség és gyakran az anyagi lehetőségek korlátozhatják. A mérnöki gyakorlatban a modellek a kutatást, a tervezést és az elemzést segítik, és ide sorolhatók a szabályozott szakaszok leírásához alkalmazott modellek is.
A modellezés során gyakran körül kell határolni a valós rendszernek azt a részét, amellyel az adott feladat megoldása érdekében foglalkoznunk kell. Ez a rész általában un. „zárt rendszert” képez, és ez a modellezési problémáink első forrása. A valóságban a műszaki rendszerek nem zártak, a környezettel és más rendszerekkel kölcsönhatásban állnak. Ezeket a hatásokat bizonyos mértékben természetesen figyelembe lehet, és kell is venni, de a teljesség igénye nélkül. A modellalkotónak tudnia kell azt is, hogy a zárt és nyitott rendszer fogalmát a különböző szakterületek részben eltérően értelmezik, így például a hőtan és a villamosságtan.
A méréstechnikában például egy modell megalkotásához a vizsgálat kezdetén rendelkezésre álló ismeretek összességét „à priori” ismereteknek nevezik. A modellezési és mérési munka végeztével ismereteink jelentősen bővülnek, és ezek következtében immár „à posteriori” információkkal is rendelkezünk. Az à priori ismeretek meghatározóak a modell minősége szempontjából, mert meghatározzák a modell típusát, bonyolultságát, a megkívánt pontosságot, és a költségeket, és ezek következtében magát a mérési eljárást és a mérés kivitelezését is. A korábban ismertetett modellformákra közösen vonatkozik, hogy szükséges egy struktúra és szükségesek hozzá paraméterek. E tekintetben mindegy ugyanis, hogy fizikai, funkcionális, vagy matematikai modellről van szó.
A legnagyobb probléma az, hogy az à priori ismeretek gyakran nem elegendőek a struktúra kiválasztására. Ebben még igen nagy a szerepe a mérnöki tapasztalatnak, a próbáknak és az un. mérnöki intuíciónak. A paraméterek becslésére és identifikációjára már objektívnek tekinthető módszerek állnak rendelkezésre.
A döntően, vagy kizárólagosan à priori ismeretekre támaszkodó modellalkotást „deduktív” szemléletnek, míg az à posteriori ismeretekkel, tehát kísérleti, mérési adatokkal operáló megközelítést „induktív” módszernek nevezik. A rendszertechnikában ez utóbbi módszert méréssel történő identifikációnak nevezik. Normál mérnöki gyakorlatban elvétve alkalmazzák kizárólagosan csak az egyik változatot, mindkettőre szükség van.
A jegyzetben terjedelmi okok miatt nem szerepelnek adaptív mechatronikai berendezések példái, bár ezek a korszerű mechatronikai rendszerekhez hozzátartoznak. Tekintettel azonban arra, hogy modellek az adaptív rendszerek elengedhetetlen részét képezik, a szerzők remélik, hogy a modern szabályozástechnikai irodalomban fellelhető modellek megértéséhez és esetleges adaptációjához is segítséget fog tudni nyújtani a jegyzet.
|
A szerzők |
1. fejezet - A modellezés szerepe a mechatronikai tervezésben
Ismereteink és eszközeink jelenlegi szintjén, a mechatronikában, a leggyakrabban modellezés két típusát alkalmazzuk. A hangsúly a „jelenlegi” kifejezésen van, hiszen az ismeretanyag dinamikusan fejlődik.
A modellezés egyik típusa a gépészet alrendszereinek numerikus modellezése a szilárdsági és dinamikai számításokban, az áramlások, a termikus, valamint a csatolt rendszerek numerikus vizsgálatában. Ezekben a modellezési folyamtokban az adott struktúrából indulunk ki, ez például a vizsgált szerkezet 2D-s, vagy 3D-s CAD modellje lehet.
A modellezések másik körébe a szabályozott, komplex rendszerek dinamikai modellezése, vagy részrendszerek dinamikai szimulációja tartozik. A dinamikai szimuláció esetében – speciális kivételektől eltekintve – az adott rendszer (részrendszer) matematikai, tehát absztrakt modelljéből indulunk ki. Azért jeleztük, hogy kivételek is lehetnek, mert több olyan dinamikus szimulációs program is létezik, amely az alkalmazó számára kész „tömbként” kínálja a mechanikai, villamos stb. rendszerelemeket. Az ilyen jellegű kínálat a 80-as évek közepétől erőteljesen növekszik, de meg kell jegyezni, hogy olyan, általánosan érvényes „blokkorientált” programcsalád egyelőre még nem létezik, amelyik minden felmerülő dinamikai szimulációs problémára maradéktalanul kielégítő megoldást kínálna.
Két okból tartjuk célszerűnek, hogy részletesebben foglalkozzunk a dinamikai modellezés hagyományos eszközeivel:
Oktatási anyagról lévén szó, fontos, hogy a dinamikai modellezés fizikai-matematikai hátterével megismertessük a hallgatóságot. A probléma ugyanis ahhoz hasonlatos, amit a VEM (VégesElem Módszer) modellezésből ismerünk. Mert hiába a legjobb VEM szoftver, ha a felhasználó nincs tisztában a műszaki mechanika összefüggéseivel. Egyrészt például képtelen helyes módon megadni a peremfeltételeket, a kényszereket, másrészt nem áll módjában ellenőrizni, hogy a kapott eredmény reális-e?
A dinamikai modellezés alapvető eszköztárával azért szükséges foglalkozni, hogy ennek ismeretében nem konvencionális feladatokat is képesek legyünk megoldani.
A mechatronikai tervezés során nem lehet vita tárgya az, hogy a szabályozott szakasz (vagy egyszerűen csak „szakasz”) valamilyen formájú matematikai modelljéből kell kiindulnunk. Ez a modell lehet adott (ezt tapasztaljuk igen sok szabályozástechnikai tankönyv esetében), de a műszaki életben, az esetek többségében a szakasz matematikai modellje nem, vagy csak részben áll rendelkezésre.
A 14. fejezet fejezet, az aktív rezgéscsillapító szabályozásának tervezése a legjobb példa, amelyen a mechatronika szinergiája bemutatható. Ide, a bevezetésbe kívánkozik a 14. fejezet fejezet befejezésében található konklúzió egy része, ezért azt most idézzük:
„…Az alap rendszer ettől még egy instabil mechanikai (gépészeti) rendszer marad. A mechatronika a nemzetközi tapasztalatok szerint csak olyan szakemberek által művelhető hatékonyan, akik tisztában vannak azzal, hogy a mechatronikai rendszerek alapvetően gépészeti rendszerek. Olyan szakemberek által, akik birtokában vannak a műszaki mechanika, a gépszerkezettan, a konstrukció, a CAD, a végeselemes modellezés és az anyagtudomány nélkülözhetetlen ismereteinek, de „közös” nyelvet képesek beszélni a villamosmérnökökkel és az informatikusokkal, feladatokat tudnak megfogalmazni és az eredményt szakszerűen ellenőrizni. Képesek esetenként maguk is egyszerűbb villamos, vagy informatikai problémák megoldására.”
1.1. A matematikai modellek formái és alkalmazásuk
A fejezet elején a rendszertechnika témaköréből röviden megemlítjük azokat az ismereteket, amelyek a tervezéshez szükségesek. A rendszertechnika témában elmélyülni szándékozók részére ajánljuk Korondi P. „Rendszertechnika” című elektronikus jegyzetét [2.4.].
A mechatronikai tervezésben a dinamikus rendszerek háromféle matematikai modellje használatos:
Differenciálegyenlet
Átviteli függvény
Állapottér modell
A három modell nem egyenértékű sem a valóság közelítése, sem a felhasználhatóság tekintetében. A legfontosabb ismereteket táblázatban foglaltuk össze.
|
|
|
Magyarázat: állandó 1 : A táblázat első oszlopában az szerepel, hogy a differenciálegyenlet kerülő úton is felírható, az impedancia módszer alkalmazásával, hiszen a Laplace transzformáció alkalmazásával „kitérőt” teszünk az operátor tartományba. Ez esetben, miután „visszatértünk az idő tartományba, lehetséges az együtthatók helyére változó paramétereket is beírni, és ezzel változó paraméterű differenciálegyenlet előállítani. Ilyen példák lehetnek mechanikai rendszerek esetében a változó rugómerevség és a speciális függvényekkel leírható csillapítási tényező, vagy áramlásos rendszerek esetében bizonyos áramlási ellenállások. Az átviteli függvény esetében ilyen megjelenítés természetesen nem lehetséges. |
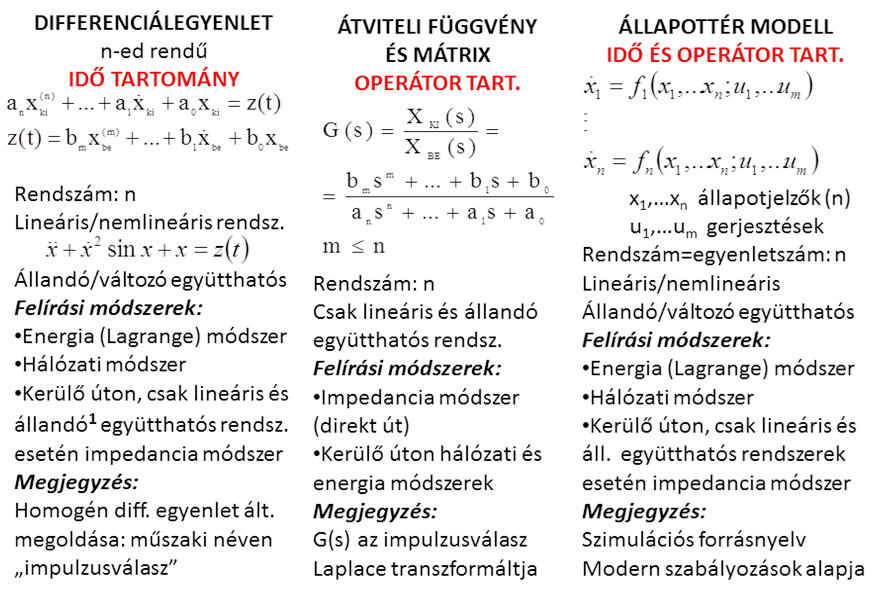
Az Táblázat 1.1 baloldali, első oszlopában n-ed rendű differenciálegyenlet látható, ami alatt konkrétan egyváltozós differenciálegyenletet értünk. A modellben egy kimeneti változó (xki) és egy bemeneti változó (xbe) szerepel. A lineáris differenciálegyenlet, annak homogén, és bizonyos partikuláris megoldása igen lényeges a szabályozások dinamikai minőségi követelményeinek tervezése, beállítása során. Ilyen időbeli minőségi jellemzők a „lappangási idő”, a „felfutási idő”, a „beállási idő”, a „túllendülés” és a „maradó szabályozási eltérés” (hiba). A gépészet sok területén (műszaki mechanika, áramlástan, hőtan) az állapottér módszer mellett a legtöbbet alkalmazott matematikai modell-forma. Az egyszerűbb szakasz-modellek lineáris differenciálegyenletekkel leírhatók, ezért a szabályozástechnikai szakirodalomban ennek a modell-formának kiemelt szerep jut. A rendszer időbeli viselkedését írhatjuk le a segítségével. Ha egy rendszer „n” db. független energiatárolót tartalmaz, akkor a differenciálegyenlet rendszáma „n” lesz. A homogén differenciálegyenlet megoldása műszaki felfogásban a magára hagyott, gerjesztetlen rendszer viselkedését írja le, általános alakban. Konkrét függvényhez természetesen csak a kezdeti feltételek megadásával juthatunk. A villamosmérnöki/szabályozástechnikai gyakorlatban ezt speciális „válaszfüggvényként” interpretálják, amennyiben a differenciálegyenlet lineáris és állandó együtthatós. Ez a függvény a rendszer impulzus bemenőjelre (Dirac-impulzus) adott általános válasza, mostanában használatos nevén „impulzusválasz”, régebbi irodalomban ez súlyfüggvényként szerepel. A mérnöki gyakorlatban, az általános bemenőjelre adott rendszerválaszt nem szokás idő tartományban, a súlyfüggvény és a konvolúciós integrál segítségével meghatározni, hanem az operátor térben, az átviteli függvény alkalmazásával. Mivel az operátor térben a konvolúciós integrál megfelelője bemenőjel Laplace transzformáltjának és az átviteli függvénynek szorzata, ugyanakkor a Dirac-impulzus Laplace transzformáltja =1, az impulzus választ legegyszerűbben az átviteli függvény inverz Laplace transzformálása révén kapjuk meg. A villamosmérnöki gyakorlatban (a gépészeti, áramlásos stb. rendszerektől eltérően) azok a passzív hálózatok, amelyek R-L-C elemeket tartalmaznak, többségükben állandó együtthatós és lineáris differenciálegyenletekkel írhatók le. Ez az oka annak, hogy előszeretettel alkalmazzák ezen a tudományterületen a Laplace transzformációt differenciálegyenletek megoldására. Ez természetesen nem jelenti azt, hogy minden villamos rendszer lineáris. Jól illusztrál egy a gyakorlatban nagy szerepet játszó nemlineáris elektromechanikus rendszert az elektromágneses csapágyazás.
A gépészet területén gyakran tapasztaljuk, hogy a nemlineáris differenciálegyenlettel leírt rendszer vizsgálata során un. munkaponti linearizálást végeznek el annak érdekében, hogy analitikus úton zárt alakú megoldáshoz juthassanak. Ezért, amint látni fogjuk, az 1970-es évektől egyre elterjedtebben alkalmazzák gépészeti dinamikai problémák leírásához hálózati módszert, ezen belül az impedancia módszert. Ha ugyanis tudjuk előre, hogy analitikus úton fogjuk keresni a megoldást, és linearizáljuk a differenciálegyenletet, akkor sokkal célravezetőbb már a folyamat elején egy jelentősen leegyszerűsített, lineáris hálózattal leírható modellből kiindulva megtenni ezt.
Egy adott rendszer differenciálegyenletéhez energia módszerrel, hálózati módszerrel, vagy közvetett módon az impedancia módszerrel juthatunk el.
Az átviteli függvény a Laplace transzformáció egyik szabályával függ össze, és, amint az előbbiekben láttuk, és alkalmazása az időtartománybeli konvolúciós integrált helyettesíti. Csak lineáris rendszer-modellekre alkalmazható. Definíciója szerint a kimenőjel és bemenőjel Laplace transzformáltjának hányadosa zérus kezdeti feltételekkel. Átviteli függvényt csak egyetlen bemenőjel és egyetlen kimenőjel között írhatunk fel. Több forrást, gerjesztést tartalmazó rendszer esetén a szuperpozíció szabályát alkalmazhatjuk. Több gerjesztés és több válasz között pedig az átviteli mátrix segítségével lehet a kapcsolatokat megjeleníteni. Az átviteli függvény az „s” Laplace operátor racionális törtfüggvénye, hiszen az „s” operátor fokszáma a számlálóban nem lehet magasabb, mint a nevezőben. A nevezőben az „s” operátor fokszáma „n”, ha a rendszerben található független energiatárolók száma „n”. A tört számlálója és nevezője egy-egy polinom. A nevezőt „karakterisztikus polinomnak” nevezik, tekintettel arra, hogy a nevező együtthatói a lineáris, állandó együtthatós, közönséges homogén differenciálegyenlet együtthatóinak felelnek meg. A homogén differenciálegyenlet, különböző kombinációkban, hiánytalanul tartalmazza a vizsgált rendszer valamennyi paraméterét, tehát jogos a karakterisztikus polinom elnevezés. Az együtthatók alapján előállított megoldás jellemzi a rendszer dinamikáját, megadja a „karakterét”. Mivel az átviteli függvény polinomokat tartalmaz, kizárt a nemlineáris rendszerek leírásának lehetősége, hacsak előzetesen linearizálás nem történt. A táblázat alatti magyarázatban leírtuk, hogy a változó paraméterekkel leírható lineáris rendszerek esetében is lehetséges első lépésben átviteli függvényt impedancia módszerrel előállítani, majd időtartományba „visszatérve” a kérdéses együtthatók esetében az álladókat megfelelő függvénnyel helyettesíteni.
Az átviteli függvény alkalmazása a szabályozástechnikában igen széleskörű és alapvető. A hagyományos szabályozókörök leírásához alkalmazott tömbvázlatok „dobozaiban” átviteli függvények szerepelnek. Innen egy lépés, és az s=jω helyettesítés révén eljutunk a frekvencia átviteli függvényhez (és a Bode diagramhoz), vagy a komplex síkon történő ábrázolás révén a Nyquist diagramhoz. Ezekkel lehetővé válik a hagyományos szabályozókörök stabilitásának vizsgálata számítással és méréssel egyaránt. A méréses utat külön szeretnénk hangsúlyozni, mert a zárt kör karakterisztikus polinomjából induló stabilitás vizsgálatok számításos eljárások. A stabilitás a minőségi követelmények második „köre”. A szabályozás dinamikai minőségi követelményeiről a differenciálegyenlet címszó alatt beszéltünk. Mind a Bode, mind pedig a Nyquist diagram, valamint az ezekhez kapcsolódó módszerek lényegében azt szemléltetik, hogy a zárt szabályozási kör nevezője semmilyen, a rendszer működése szempontjából lényeges (releváns) körfrekvencia esetében sem adhat zérus értéket. Elméletben természetesen a körfrekvencia tartomány megfogalmazása más módon történik: 0≤ω<∞. A zárt kör átviteli függvénye a szokásos felírási módon:
|
|
ahol G(s) a felnyitott kör átviteli függvénye, azaz a hurokátviteli függvény, a számlálóban a szabályozó és a szakasz átviteli függvényeinek szorzata található. A „kanonikus” szabályozókör tömbvázlatát a „Bevezetőben” találjuk a (2. ábra) ábrán.
Így tehát kérdéses nevezőt az s=jω helyettesítés után zérussal egyenlővé téve megkapjuk azt a kritikus körfrekvenciát, amely esetében a szabályozókör a stabilitás határára kerül. Ebben az esetben a harmonikus ellenőrző jel és az ugyancsak harmonikus alapjel amplitúdói megegyeznek, a két jel közötti fáziskülönbség pedig ±π, azaz ±180°.
|
|
Érdemes egy gondolati kísérlet végezni. Válasszuk le a különbségképző bemenetéről a negatívan visszacsatolt ellenőrző jelet! Legyen az alapjel speciális, mégpedig a kritikus körfrekvenciájú harmonikus jel, amelyet egyetlen periódus elteltével lekapcsolunk! A kritikus körfrekvencián azt tapasztaljuk, hogy ez az alapjel végighaladva a hurkon, ±π fázistolással, és azonos amplitúdóval, ellenőrző jelként megjelenik. Biztosak lehetünk abban, hogy a kör újbóli zárása után oszcilláció, azaz csillapítatlan lengés jön létre, mert a fázisában ±π szöggel eltolt jel a negatív visszacsatolás után éppen ellenfázisba kerül. Ez pedig nem más, mint az eredeti alapjel, tehát a kör alapjel nélkül is „működik”. Az oszcillációt természetesen a szabályozókörbe becsatolt energia tartja fenn.
Megjegyezzük még, hogy a vizsgálatokat azért végezzük harmonikus jelekkel, mert minden műszaki szempontból szóba jöhető periodikus és bizonyos feltételek mellett a nem periodikus jelek is, harmonikus összetevőkre bonthatóak a Fourier transzformáció segítségével. (Megjegyezzük, hogy Fourier sora csak periodikus függvényeknek van). A témáról részletesen Fodor György [3.1.] és Korondi Péter [2.4.] munkájában olvashatunk. Így tehát, ha ismerjük a harmonikus jelek átviteli karakterisztikáját, akkor elvben bármilyen jel átvitele meghatározható.
Az állapottér modell, más néven az állapotegyenletek a fizikai-technikai rendszerek legátfogóbb leírását teszik lehetővé, mind idő, mind pedig operátor (körfrekvencia) tartományban. A modern szabályozások (állapotszabályozás, állapot-megfigyelés, adaptív szabályozás) leírásához kifejlesztett modell-forma. Ezen túlmenően minden, jelenleg ismert digitális számítógépes szimulációs program kiinduló pontja.
Felépítését tekintve ez a matematikai modell a differenciálegyenlet Cauchy-féle normál alakja. Lényeges, hogy „n” db. független energiatárolót tartalmazó rendszer esetében „n” db. elsőrendű differenciálegyenletből épül fel. Ezek a differenciálegyenletek lehetnek lineárisak és nemlineárisak is, állandó és változó együtthatósak.
Ha a rendszer lineáris (linearizálható) és a paraméterek invariánsak (állandók), akkor az állapottér modell felírható mátrix-vektor egyenletrendszer formájában is. Az első egyenlet a főegyenlet, a második a segéd, vagy kimeneti egyenlet.
|
|
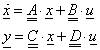
A főegyenletben az  mátrix a „rendszermátrix”, hiszen elemei különböző kombinációkban a rendszer minden paraméterét tartalmazzák. A
mátrix a „rendszermátrix”, hiszen elemei különböző kombinációkban a rendszer minden paraméterét tartalmazzák. A  neve „bemeneti mátrix”, a gerjesztések ezen keresztül hatnak az állapotjelzők időbeli megváltozására. A segédegyenletben a
neve „bemeneti mátrix”, a gerjesztések ezen keresztül hatnak az állapotjelzők időbeli megváltozására. A segédegyenletben a  a „kimeneti mátrix” és
a „kimeneti mátrix” és  a „segédmátrix”. A homogén differenciálegyenlet ebben az esetben is a gerjesztetlen rendszert jelenti. A megoldást idő tartományban az
a „segédmátrix”. A homogén differenciálegyenlet ebben az esetben is a gerjesztetlen rendszert jelenti. A megoldást idő tartományban az  exponenciális mátrix Taylor sorfejtésével, vagy operátor tartományban a
exponenciális mátrix Taylor sorfejtésével, vagy operátor tartományban a  karakterisztikus egyenlet gyökeinek meghatározásával kapjuk.
karakterisztikus egyenlet gyökeinek meghatározásával kapjuk.
1.2. A modellalkotás folyamata
Bevezetőben le kell szögezni, hogy ismereteink és eszközeink végessége miatt a technikai (és egyéb) rendszerek tökéletes, hiba nélküli leírására vállalkozni illuzórikus lenne. A műszaki rendszerekre ható tényezők elvben „végtelen” nagy száma és a rendszeren belüli összetett kölcsönhatások miatt többnyire „zárt rendszerek” vizsgálatára szorítkozunk. Az un. zárt rendszer határainak kijelölése komoly tárgyi tudást és igen nagy szakmai tapasztalatot feltételez. A mechatronika természetesen az irányítástechnikához (szabályozástechnika és vezérléstechnika) áll a legközelebb, de a problémákat jellemzően nem villamosmérnöki szemlélettel közelíti, hanem a teljes műszaki rendszert egészében vizsgálja. A mechatronikai tervező mérnöknek kellő mélységben ismernie kell a műszaki mechanika, az elektrotechnika az áramlástan és a hőtan tudományterületeket. Felületes ismeretek nem elegendőek. Ezen túlmenően, felhasználói szinten, járatosnak kell lennie az analóg és digitális elektronikában, és az informatikai eszközök kínálatában. Ez utóbbi körébe tartoznak többek között a végeselem (VEM) szimulációs programok, a CAD/CAM rendszerek, a matematikai és dinamikai szimulációs programok, az optikai képfeldolgozásra alkalmas programok, a mikrokontroller és PLC ismeretek. Jól érzékelteti ezt W. Roddeck az Einführung in die Mechatronik című, végzett gépész-és villamosmérnökök számára írt könyvében [1.1.].
A mechatronikai gyakorlatban igen ritka, hogy a szabályozás tervezésénél „adott matematikai modellből” indulunk ki. A matematikai modell általában nem ismert, nem adott, ezt első lépésben a mechatronikai mérnöknek kell létrehoznia, esetenként más szakterületek szakembereinek bevonásával.
A mechatronikai rendszerek minden ismert esetben összetett, esetenként többszörösen összetett rendszerek. A nemzetközi tapasztalatok mennyisége 1984-tól kezdődően, azaz a „mechatronika” szakkifejezés védettségének 15 éves elmúlását követően, a mechatronika szakterületen lavinaszerűen bővül. Jelen pillanatban szinte meg sem jósolható, hogy mely újabb tudományterületeken fog a mechatronikai szemlélet tért hódítani. Egykor a fényképező és videó rendszerekből kiindulva, a gépészet valamennyi területén gyorsan megjelent, és jelenleg, - néhány jellegzetes területet kiemelve - a szórakoztató elektronikától kezdve az építőiparon, a közlekedésen, a mezőgazdaságon át az orvostechnikáig mindenütt jelen van. Az utóbbi években, az intelligens anyagok és szerkezetek kutatásának hatására már nem is mechatronikáról, hanem „adaptronikáról” beszélünk.
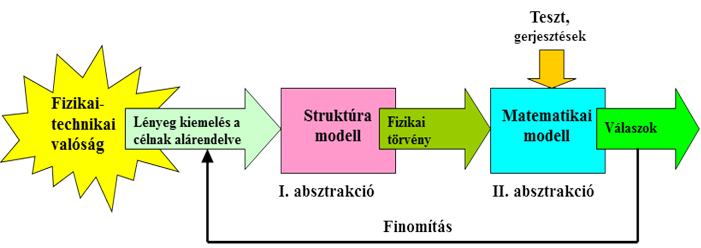
A modellezés folyamat ábráján minden lényeges mozzanat látható. A bonyolult fizikai-technikai rendszerből két absztrakciós fokozaton áthaladva jutunk el a rendszer matematikai modelljéhez. A fentiekben ismertettük, hogy a vizsgált rendszer a maga teljességében és összes kölcsönhatásait figyelembe véve nem írható le, de erre a műszaki feladatok megoldása során nem is lenne szükség.
Első lépésben meghatározzuk a rendszerhatárokat, és ezt követően un. egyszerű, vagy komplex zárt rendszerről beszélünk. Tulajdonképpen lényegkiemelés történik, az adott modellezési célnak alárendelve. Ebben a fázisban kell eldönteni, hogy szükséges-e elosztott paraméterekkel és parciális differenciálegyenletekkel modellezni, vagy elegendő a megkívánt pontosság betartásához a koncentrált paraméterű modell. Például egy villamos vezető darabot, a jelek jellemző frekvenciájától függően modellezhetünk „R” ohmos ellenállásként, de megjeleníthetjük tápvonalként, négypólusok láncolataként is, amely „Z(ω) hullámimpedanciával rendelkezik. A gerjesztés módjától és frekvenciájától függően jelek (változók) frekvenciájától (hullámhosszától) függően egy lemez, vagy rúd alakú alkatrész modellezhető a mechanikában egyetlen tömegként. Ugyanezt az alkatrészt lehet veszteséges rugalmasságokkal összekötött, parciális tömegrészekből álló, elosztott paraméterű rendszerként is modellezni, amelyek több „módusa” (rezonancia frekvenciája) van. Itt kell eldönteni, hogy milyen, más típusú rendszerekkel való kölcsönhatásokat kell figyelembe venni. Például egy villanymotor modellezése esetében elegendő az elektromechanikus modellt vizsgálni, vagy ki kell egészíteni egy hőtechnikai modellel is. Napjaink gazdaságközpontú gondolkodása igen sok esetben nem teszi lehetővé az aprólékos, részletekbe menő modellek megalkotását, igyekezni kell a „megrendelő” igényeit az elengedhetetlenül szükséges tudományos alapossággal kielégíteni.
Erről a témáról a 19. fejezet fejezetben bővebben is olvashatunk, ahol a módszeres tervezés lépéseit mutatja be a szerző.
Ebben a lépésben kell eldöntenünk, hogy nem lineáris módon, illetve lineáris modellel, állandó, vagy változó paraméterekkel, esetleg mindkettővel, vegyesen írjuk le a zárt rendszert. A mechanikai részrendszerek egyik alapvető problémáját okozza például a különböző súrlódások modellezése. Sokféle közelítés létezik, de az igényes minőségű szimuláció elengedhetetlen részét képezi az adott rendszeren történő mérés, és a keresett leíró függvény kísérleti meghatározása. A súrlódást modellezhetjük „b” csillapítási tényezővel, egy állandóval, ilyen a „Newton-i”, lamináris súrlódási modell, de a Coulomb súrlódás, vagy a Striebeck-effektus precíz leírása már körülményesebb. A súrlódó erő függhet a sebesség mellett, a hőmérséklettől, a hőmérséklet befolyásolja a súrlódási együttható értékét, és sok egyéb hatást ismerünk a tribológiából b(v,µ,T,…). Látható, hogy egy hőmérséklettől függő villamos vezetőképesség (ellenállás reciproka), amely egyenes analógiája a csillapítási tényezőnek, kevesebb gondot okozhat a modellalkotásnál.
A modellezési lehetőségek áttekintését – a teljesség igénye nélkül - segíti az alábbi táblázat:
|
Modell jelleg Paraméter típus |
Lineáris |
Nemlineáris |
|
Koncentrált, állandó paraméterű |
|
|
|
Koncentrált, változó paraméterű |
|
|
|
Elosztott paraméterű |
kontinuumok, tápvonalak |
a „valóság” közelítésének iránya |




1.3. Technikai rendszerjellemzők a matematikai modellekben
Az áttekinthetőség érdekében a bevezetőben, a fejezetben szereplő technikai rendszerjellemzőket külön felsoroljuk.
Elsőrendű rendszerek jellemzői:
Időállandó
Letörési körfrekvencia
Arányos tényező
Csillapítási kitevő
Rezgő rendszerek jellemzői:
Arányos tényező
Periódusidő
Csillapítási fok
Csillapítási kitevő
Csillapítatlan rendszer rezonancia körfrekvenciája
Csillapított rendszer rezonancia körfrekvenciája
Karakterisztikus polinom
A témával kapcsolatosan igen sok szakirodalommal, és többféle megközelítésben találkozhatunk. A mechatronika személetéhez igen közel áll H. Lutz és W. Wendt Taschenbuch der Regelungstechnik c. műve [1.2.], amely a modellezésre építve mutatja be a hagyományos és modern szabályozástechnika legfontosabb ismereteit.
1.3.1. Elsőrendű lineáris rendszerek jellemzői
Az elsőrendű lineáris rendszer időállandója a homogén differenciálegyenlet megoldásában jelenik meg. A levezetést az 5. fejezet fejezetben találjuk, itt csak az eredményt használjuk fel a fontos kapcsolódások bemutatására. Az időállandó összefügg a csillapítási kitevővel.
|
|
A megoldásban az „a” paraméter általános jelölés. A műszaki gyakorlatban a másik kettőnek van jelentősége. A „T” az időállandó, „σ=1/T” pedig a csillapítási kitevő (csillapítási exponens).
Ha van kezdeti (esetleg kiindulási) érték, és nincs gerjesztés, akkor az általános alak által kínált görbesereg helyére egy függvény lép lecsengő folyamatnál:
|
|
Technikai rendszereinkben nem minden esetben áll rendelkezésre a t=0+ időpillanathoz (jobboldali, un. kezdeti érték) tartozó érték, erről az 5. fejezet fejezetben egy gyakorlati példa kapcsán esik szó. A megoldás könnyen előállítható, ha a kiindulási érték és a kezdeti érték megegyeznek. Ez a feltétel technikai rendszerek esetében gyakran teljesül, mert a bekapcsolás időpillanatában az energiatároló lehet felöltött állapotban, és a feltöltöttséget jelző változó ilyen esetben nem zérus értékről indul.
Különleges gerjesztések esetében, ilyenek a Dirac impulzus és az ugrás függvény, újabban használt nevén „step function”. Ilyen gerjesztések esetében a számításokhoz különleges megfontolások szükségesek, ez a rendszertechnika egyik fontos területe.
A megoldás mutatja, hogy t=0+ és az időállandó között eltelő időben a megoldás függvény az x(0+) kezdeti értékről éppen annak e-ad részére csökken, majd újabb időállandónyi idő elteltével ugyancsak az előzőleg kapott érték e-ad részére:
|
|

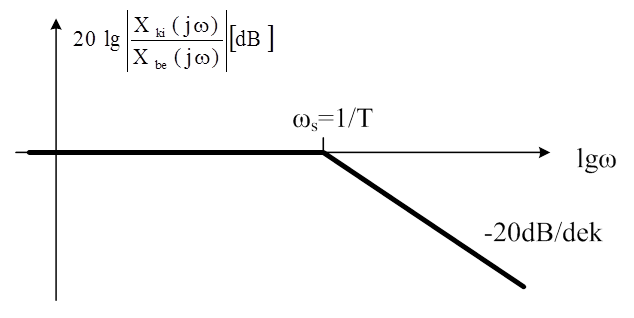
Az időállandó tehát az elsőrendű rendszer viselkedését leíró egyik fontos jellemző. Szerepe az operátor, vagy körfrekvencia tartományba is „átnyúlik”, hiszen irányítástechnikából ismeretes, hogy az időállandó reciproka a letörési körfrekvencia. Az irányítástechnikai gyakorlatban szokás az elsőrendű rendszerek Bode diagramjait egyenes szakaszokkal közelíteni. A közelítő függvényen az amplitúdó átvitel logaritmusának húsz-szorosa (dB) a körfrekvencia értékéig állandó (un. arányos átviteli sáv), ettől kezdődően -20 dB/dekád meredekséggel bír. Ismeretes az is, hogy a letörési körfrekvenciánál az átvitel pontos értéke ~3 dB-lel kisebb, mint az arányos átviteli sávban mutatott érték. A ~3 dB méréstechnikai szemszögből már tekintélyes hibát jelent, mert ez a kimeneti jelszint ~30 %-os csökkenését jelenti a bemenetihez viszonyítva.
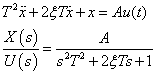
Az előzőekben említett arányos átviteli sáv fontos jellemzője az „A” arányos tényező. Ez az állandó a differenciálegyenlet „jobb” oldalán látható, az átviteli függvénynek pedig a számlálóját képezi:
|
|
Az „A” tényezőt erősítési tényezőnek is nevezik, ami nem egészen tükrözi a valóságot, mert erősítésről rendszertechnikai szempontból akkor beszélünk, ha a rendszerbe kívülről energiát viszünk be, és valóban erősítjük a bemenő jelet, A>1. Ugyanakkor passzív elsőrendű rendszernek is lehet arányos tényezője, csak jellegzetesen A≤1 értékkel.
A modellezési és tervezési gyakorlatban előfordul, hogy elhamarkodott és hibás következtetéseket vonnak le csupán azért, mert a villamos és a mechanikai rendszerek közötti analógiákat hibásan alkalmazzák.
A jelenség bemutatására a „kifutási” görbék és a mechanikai időállandók kérdését elemezzük.
A hajtóművel foglalkozó fejezetben részletesen bemutatjuk, hogy a valós hajtómű lényegében a következő ábrán látható fontos elemeket tartalmazza: KH eredő rugómerevség, J1 és J2 bemenő és kimenő oldali tehetetlenségi nyomatékok, valamint ugyanezen oldalakhoz tartozó csillapítási tényezők, amelyek a fogsúrlódással és a csapágysúrlódásokkal vannak kapcsolatban.
Ezen a helyen a mechanikai és a villamos időállandó közötti különbség, és nem a hajtómű modelljének bemutatása a cél, ezért a hajtómű gráfjában látható elemeket itt nem részletezzük. A hajtómű részletes modelljeit a 7. fejezet fejezetben találjuk meg.
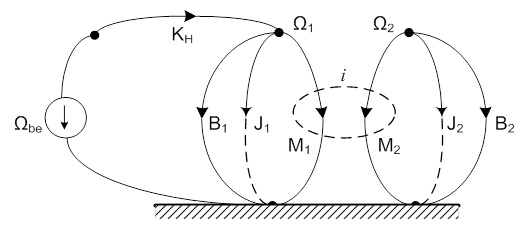
Ha a kifutási próba vizsgálatánál eltekintünk a rugalmasságtól, ami teljesen indokolt, továbbá meghatározott Mbe0 bemenő nyomatékkal „pörgetjük fel” a hajtóművet, akkor a gráf módosul. A bemenő oldali elemeket redukáljuk a kimenő oldaliakhoz, és az Mbe0 nyomaték helyett értelemszerűen Mbe=i·Mbe0 forrásérték fog megjelenni.
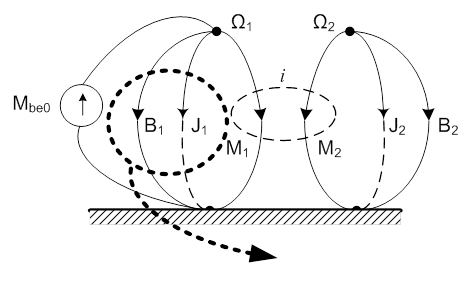
A keresztváltozó forrás „megtartásának” nem lenne értelme, mert ebben az esetben nincs rendszeregyenlet, a párhuzamos elemekre „rákényszerítjük” a szögsebesség forrás értékét.
A redukció után kapott értékek esetében – a megkülönböztetés érdekében - eltekintünk az indexektől.
|
|

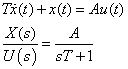
A következő ábra már a hajtómű egyszerűsödött gráfját mutatja arra az esetre, ha az eredő rugómerevség kellően nagy ahhoz, hogy az eredő tehetetlenségi nyomatékkal ne tudjon lengő rendszert képezni. A mikromotorokhoz kapcsolt hajtóművek esetében gyakorlatilag ez a helyzet. A gráf alapján felírt csomóponti egyenletből kapott rendszeregyenlet az alábbi:
|
|
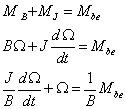
Az átviteli függvényt a Laplace transzformálás után kapjuk:
|
|
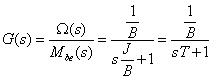
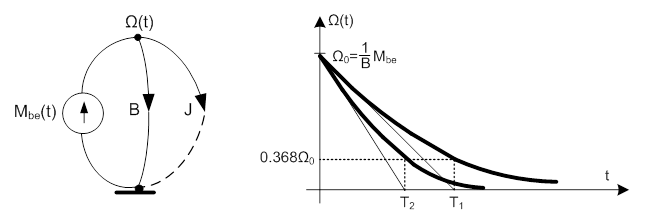
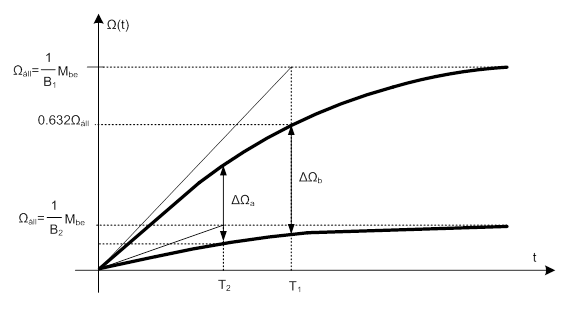
A gráf mellett a magára hagyott rendszer válaszait láthatjuk, Ω0 kiindulási érték, és T=J/B időállandó mellett. A vizsgálatunk során T1 az „induló” időállandó, ez a terheletlenül járó DC motor kifutási görbéjéhez van rendelve. A következő lépésben csatlakoztattuk a motorhoz a hajtóművet, és a T2 időállandóval jellemzett kifutási görbét kaptuk. Látható, hogy a második esetben, a csekély mértékben megnövekedett az eredő tehetetlenségi nyomaték (J), és jelentősen megnőtt az eredő csillapítási tényező (B) kisebb időállandót eredményezett, a kimenő tengely forgása hamarabb áll le.
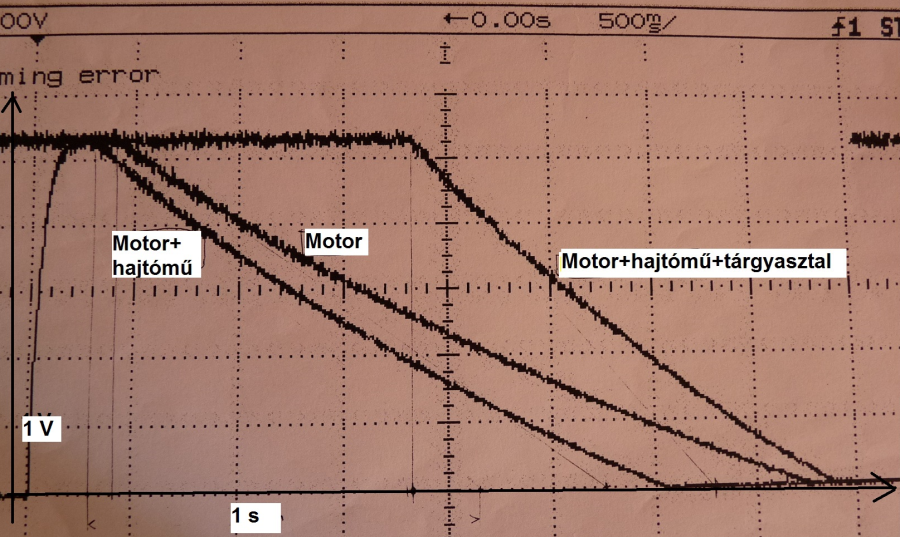
A mérésekkel kapott kifutási görbéket a hajtóművel foglalkozó fejezetben is megtaláljuk, de a könnyebb megértés kedvéért itt is szerepeltetjük.
Nyilvánvaló, hogy dinamikai szempontból nem a kisebb időállandójú mechanikai rendszer „jobb”. Ennek belátásához jobban szemügyre kell venni az átviteli függvény számlálóját! A fejezet címében nem véletlenül szerepel hangsúlyosan az „arányos tényező”. Azok az elsőrendű rendszerek, amelyek számlálójában az arányossági tényező egyenlő eggyel, valóban megítélhetők dinamikai szempontból pusztán az időállandóik alapján.
De vigyázat, ez a vizsgált mechanikai rendszer nem ilyen!
A különbség érzékeltetésére bemutatjuk azt a forgó mechanikai rendszert, amelynek átviteli függvényében az arányos tényező értéke egy. A mechanikai rendszer eléggé „iskolás” jellegű, mert ehhez hasonlót a gépészetben nem gyakran lehet találni. Ugyanakkor a mellette látható, és vele strukturálisan analóg (felépítésében hasonló) villamos analóg kapcsolás egy rendszeresen alkalmazott, passzív aluláteresztő szűrőt ábrázol. Meg kell jegyezni még, hogy vannak olyan egyszerű, valós termikus, fluid (akusztikai, pneumatikus és nyitott tartályú hidraulikus) rendszerek, amelyeket ugyanilyen kapcsolás ír le, gondoljunk a termoelektromos hőmérőre, vagy egy fojtáson keresztül töltött tartályra. Az alább bemutatott gépészeti modell csak akkor tekinthető ezekkel analógnak, ha a csapágy súrlódása elhanyagolható, és a tengelykapcsolónál csekély a slip (csúszás).
Megtévesztő lehet az is, hogy az ábrán látható két rendszernek a kifutási görbéhez hasonló az impulzus válaszuk (súlyfüggvényük). Ebben nincsen semmi csodálatos, hiszen a keresztváltozó forrás, és a mellette szereplő impedancia (Thevenin alak) átszámítható egyenértékű Norton alakká, és akkor újra visszakapjuk a kiindulásként látott párhuzamos elemekből és átmenő változó forrásból álló gráfot.
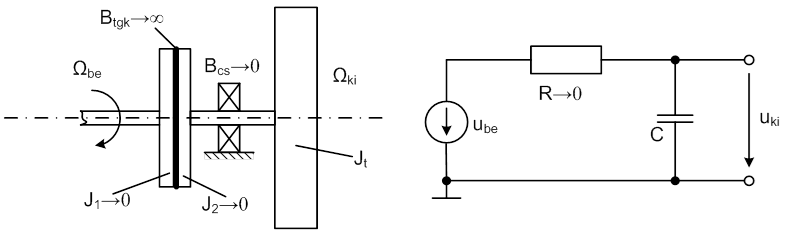
Nézzük egymás mellett a két rendszer matematikai modelljeit, ti: átviteli függvényeit, amelyeket az impedancia módszerrel, keresztváltozó osztó alkalmazásával írtunk fel:
|
|
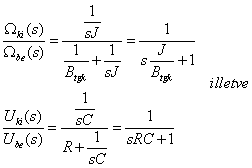
Ha az ábrán jelölt módon „kimerevítjük” a tengelykapcsolót, azaz Btgk→∞, akkor az a villamos rendszerben az R→0 módosításnak felel meg, tekintettel arra, hogy Btgk nem az ellenállással, hanem a vezetőképességgel analóg. Ha a jelölt módosításokat elvégezzük, akkor az átvitel a körfrekvenciától függetlenül 1:1 lesz, a harmonikus kimenő és bemenő jelek amplitúdói megegyeznek, fázistolás nincsen.
Mindkét átviteli függvény számlálójában „egy” szerepel, a mechanikai és a villamos időállandó „egyedül” fogja „minősíteni” az aluláteresztő szűrőket. Kis időállandóhoz nagy letörési körfrekvencia, és fordítva lesz rendelve, amint az alábbi Bode diagramon láthatjuk. Az arányos átvitel (kör)frekvencia sávjában a számláló értéke miatt természetesen zérus decibelt találunk.
Már az előzőekben is hangsúlyoztuk, hogy a gyakorlatban előforduló forgó mechanikai rendszerek nem azonosak a most bemutatott „iskolapéldákkal”.
A valós hajtóművek dinamikus viselkedése más, és ez az átviteli függvény számlálójának figyelembe vételével válik világossá.
Érthetővé válik a különbség, ha nem csak a kifutási görbe alakját, hanem a rendszer átmeneti függvényét és a Bode diagramot tesszük vizsgálat tárgyává.
A DC mikromotor és a valós, de rugalmasság nélküli hajtómű átmeneti függvényei a (1.8. ábra) ábrán láthatók. A DC mikromotor méréssel kapott kifutási görbéjén nem láttunk lengéshajlamra utaló jeleket. Ez azért van, mert a kisebb méretű motorok nyugalmi induktivitása (L) meglehetősen kicsi, a súrlódásos veszteségek finommechanikai szerkezetekben dominánsak, a mikromotort a gyártók is elsőrendű (egy energiatárolós) rendszernek tekintik. Így tehát a méréssel kapott kifutási diagramok is két egytárolós rendszert mutatnak.
A DC motorral foglalkozó fejezetben látni fogjuk, hogy a DC motor átviteli függvénye a kapocsfeszültség, mint bemenet, és a szögsebesség, mint kimenet között alakra megegyezik a nyomaték bemenettel gerjesztett hajtómű átviteli függvényével, ha a DC motor nyugalmi induktivitása elhanyagolhatóan kicsi. A levezetést az említett fejezetben találjuk, itt az összehasonlítás miatt csak az eredményt mutatjuk be:
|
|
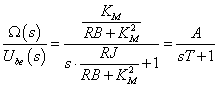
ha L→0.
A következő ábrán olyan egytárolós arányos tagok átmeneti függvényeit látjuk, amelyek számlálójában az arányos tényező nem egységnyi, hanem jellemző a rendszerre.
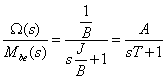
Ilyen a fejezet elején említett motor, valamint a motorral egybeépített hajtómű átviteli függvénye is. A levezetést nem ismételjük, csak az eredményt:
|
|
Ha a fenti átviteli függvénnyel jellemzett rendszerre ugrás-szerű nyomatékváltozást adunk, vagy a DC motor egyszerűsített átviteli függvényére ugrás-szerű feszültség változást kapcsolunk, egységugrás bemenőjel formájában, akkor a válaszként kapott szögsebesség (fordulatszám) az alábbi diagramon látható módon fog változni (átmeneti függvény, step response). Tegyük fel, hogy az időállandókat a kifutási görbék segítségével állapítottuk meg. Az önálló motor időállandója T1, míg a hajtóművel egybeépítetté T2. Amint a fenti magyarázatból tudjuk, T1>T2.
A két átmeneti függvény szemléletes formában ad választ az eredetileg feltett kérdésre: Jellemezheti-e egy elsőrendű mechanikai rendszer dinamikai tulajdonságait az időállandó önmagában? Látszik, hogy nem, hiszen a nagyobb időállandójú motor ugyanakkora bemenő nyomatékra minden időpillanatban nagyobb szögsebességgel válaszol, nem beszélve az állandósult állapotbeli szögsebességről, amelyet egyértelműen a csillapítási tényező – azaz a súrlódás(ok) – határoz(nak) meg.
A körfrekvenciától való függés is hasonló következtetést sugall. Ha a Bode diagramot vizsgáljuk, akkor látható, hogy a letörési körfrekvencia (ωs=1/T) nem minden esetben perdöntő, hiszen a nagyobb arányos érték (az átviteli függvény számlálója) nagyobb átviteli tényezőt eredményez, még a kisebb időállandójú mechanikai rendszer törési körfrekvenciáján is. Annak ellenére, hogy ezen a szakaszon a nagyobb időállandójú rendszer diagramja már a „leszálló” ágban van.
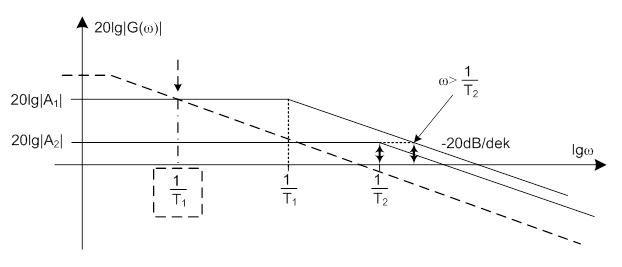
Mindezt arra az esetre feltételeztük, ha a két időállandó nem különbözik egymástól nagyságrendileg, és T1 a nagyobb. Ha a Bode diagramon szaggatott vonallal jelölt szélsőséges eset fordulna elő, azaz T1 már nagyságrendekkel nagyobb lenne, mint T2, akkor az előbbi fejtegetés a (kör)frekvencia tartományban természetesen nem áll meg.
Az idő tartományban, az átmeneti függvényre továbbra is az vonatkozik, hogy azonos értékű gerjesztésre a nagyobb időállandójú mechanikai rendszer kimenőjelének értéke lesz a nagyobb.
1.3.2. Rezgő rendszerek jellemzői
Rezgő, alacsonyabb frekvencia tartományban lengő technikai rendszerek alatt olyan rendszereket értünk, amelyekben minimálisan két olyan energiatároló található, amelyek egymáshoz képest ±180° fázistolással tárolják az energiát. Azért nem írunk „eltérő” típusú tárolót, mert ez nem általánosan érvényes. Ha ugyanis a rendszer két eltérő típusú fizikai rendszerből áll, és a részrendszereket fordított váltó köti össze (pl. piezoelektromos átalakító), továbbá mindkét részrendszerben van egy-egy eltérő típusú energiatároló, akkor a fordító váltó tulajdonságai miatt nem jöhet létre rezgés (lengés). Ugyanis a fordító váltó által azonos oldalra átszámított energiatároló típusa szerint pont az ellentettjére vált, így azonos oldalon két azonos típusú energiatároló lesz, ezek pedig nem képesek lengésre. Ennek a gyakorlati levezetését láthatjuk a 6.1. szakasz fejezetben.
Azért szerepel a bevezető sorban a „minimálisan” kifejezés, mert természetesen lehet kettőnél több energiatároló is, de mindenképpen páros számú, és párosával eltérő típusú.
A legáltalánosabb eset a másodrendű rezgő (lengő) rendszer. A modelljeink között, az egyszerű, energiaátalakítót nem tartalmazó, másodrendű technikai rendszerek két rendszertípus kivételével előfordulhatnak. Ez a két rendszer típus a termikus és a pneumatikus rendszer, amelyekben csak kapacitív tárolók vannak, ennél fogva rezgés (lengés) nincs.
A másodrendű, lineáris rezgő rendszer általános modellje idő és operátor tartományban:
|
|
E formák közül valamelyik – több technikai rendszer modellezésének eredményeként – a jegyzet több fejezetében is előfordul.
A két matematikai modell „direktben” több fontos technikai jellemzőt tartalmaz, továbbiak pedig a felhasználásukkal levezethetőek:
|
T |
másodrendű rendszer időállandója, T=1/α, ahol α a csillapítatlan rendszer rezonancia körfrekvenciája | |
|
ξ |
csillapítás foka, csillapítási szám (dimenzió nélküli, mechanikus rendszereknél a Lehr csillapítás, jelölése: D) | |
|
A |
arányos tényező |
A fenti jellemzőkből levezethető továbbá a
|
Tp |
lengési periódusidő, és | |
|
ωr |
csillapított rendszer rezonancia körfrekvenciája |
Gyakran nem világos a tervezők előtt, hogy miért a fentebb megadott matematikai modell-formát alkalmazzák a szabályozástechnikában és a mechatronikában. Érdemes ezért az összefüggéseket röviden összefoglalni.
A matematikában egy másodrendű állandó együtthatós lineáris differenciálegyenlet megoldásához homogén algebrai egyenletté átalakítják át a differenciálegyenletet (karakterisztikus egyenlet), bevezetve a „λ” sajátértékeket, majd megkeresik λ megoldásait:
|
|
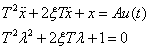
A másodfokú egyenletből kapott megoldásokat exponenciális függvény kitevőjében látjuk viszont. Általános alakban (kezdeti érték nélkül) a homogén egyenlet megoldása az alábbi formákat öltheti:
|
|
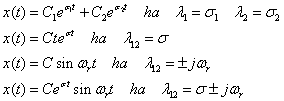
A fent bemutatott változatok általános formák, egyelőre nem kötjük ezeket valós technikai rendszerekhez, ezért nem tettünk előjelet a megoldások valós része (σ) elé.
A formával kapcsolatosan feltett kérdésre azonban egyúttal itt a válasz is, a gyökoldó képlet formájában:
|
|

A gyökoldó képlet elemzésére most nem térünk ki, sem az előjelre, sem pedig a gyök alatti kifejezésben ξ nagyságára.
A rendszermodellezésben, a Laplace transzformáció bevezetésével, a sajátérték helyét „elfoglalja” az „s” komplex operátor. Az időtartománybeli megoldásokat az inverz Laplace transzformáció segítségével kapjuk, és ez a művelet az átviteli függvény nevezőjéből (karakterisztikus polinom) képzett egyenlet gyökeinek keresésével indul. A karakterisztikus polinomot egyenlővé téve zérussal, az alábbi formát és megoldásokat nyerjük:
|
|
Mechatronikai rendszerek esetében érdemes a gyököket részletesebben megvizsgálni, mert fontos összefüggéseket látunk az irányítástechnikával.
|
|
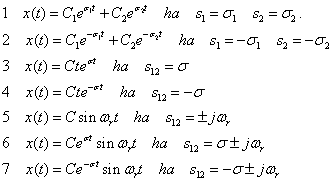
Passzív másodrendű rendszer esetében, a valós rész előjele a megoldásokban kizárólag negatív lehet.
Ugyanakkor, ha pl. egy zárt szabályozókör átviteli függvényének karakterisztikus polinomjára, és az abból képezett karakterisztikus egyenletre gondolunk, akkor előfordulhat pozitív előjelű valós rész, de nem minden következmény nélkül.
Ha ábrázoljuk a számmal megjelölt gyököket az operátor komplex síkján, akkor a probléma azonnal világossá válik:
Stabil rendszer kizárólag az lehet, amelynek gyökei negatív előjelű valós résszel rendelkeznek. Ez ugyanis az időtartományban negatív kitevőjű exponenciális függvénynek felel meg, ilyenek a 2, 4 és 7 számmal jelölt függvények. A fenti ábrán háttérszínnel jelöltük az instabil rendszert képviselő megoldásokhoz tartozó, „jobboldali” félsíkot, amelybe beletartozik a képzetes tengely is. A színezett mező jobboldali sarkain jelöltük, hogy a kiterjedés csak baloldalon van korlátozva. Azt, hogy a félsík a gyakorlatban átterjed a baloldalra is, a képzetes tengely baloldalán egy „biztonsági” sávval, jelöltük. A gyakorlat számára ugyanis ezen a sávon belül még ugyancsak kritikus egy rendszer viselkedése, mert túlzottan kicsi a csillapítása.
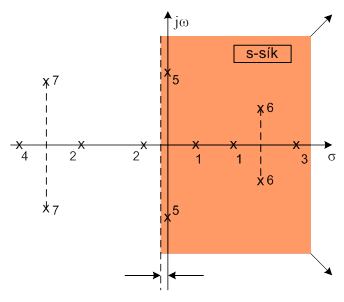
Nézzük ezek után, miként befolyásolja a megoldásokat ξ értékének nagysága. A gyakorlatban a következő eseteket vizsgáljuk:
ξ>1 Túlcsillapított rendszer

két negatív valós megoldás van, 2-es számmal jelölve:

ξ=1 Kritikus csillapítás

kettős negatív valós megoldás, 4-es számmal jelölve

ξ<1 Alulcsillapított rendszer
konjugált komplex gyökök, 7-es számmal jelölve
Ehhez a megoldáshoz a következőket kell hozzáfűzni:
A megoldás alakja:  , amelyet az exponenciális függvénybe behelyettesítve az Euler összefüggések alapján az alábbi formát kapjuk:
, amelyet az exponenciális függvénybe behelyettesítve az Euler összefüggések alapján az alábbi formát kapjuk:
|
|

Ezt a komplex függvényt csak a térben, időfüggő vektorként lehet elképzelni. Az idő tengely mentén előrehaladva, forog a vektor, miközben exponenciálisan csökken a vektor abszolút értéke. A gyakorlatban ennél a megoldásnál vagy a valós, vagy a képzetes részt szokták megadni. A 7-es számmal jelölt megoldás esetünkben a komplex részt testesíti meg.
A fejezet elején két olyan jellemzőt soroltunk fel, amelyeket származtatás, levezetés révén kaphatunk, ezek a Tp lengési periódusidő, és ωr a csillapított rendszer rezonancia körfrekvenciája. Ez a két jellemző az alulcsillapított rendszerhez tartozik, azaz ξ<1.
Nézzük a gyökök megoldásfüggvényét erre az esetre:
|
|

Látható, hogy
|
|

A fenti képlet azt jelenti, hogy ωr=α csak zérus csillapítási szám mellett lehetséges. Minden valós, csillapított rendszernek a csillapítatlanhoz képest alacsonyabb a rezonancia körfrekvenciája.
Ezen a helyen fontos megjegyezni, hogy a mechatronikában és irányítástechnikában a másodrendű rezgő rendszer Bode diagramjának rajzolásakor világosan meg kell különböztetni a három esetet. Gyakran előfordul, hogy Bode diagramként csak a ξ>1 értékhez tartozó görbét rajzolják fel, két törésponttal, egyenesekkel közelítve, ami nem mindig helyes. A paraméterek becslése, tapasztalatok, vagy mérési eredmények alapján a diagramot a megfelelő formában kell ábrázolni. Megjegyezzük, hogy a ξ=1 előfordulása valós technikai rendszerben igen ritka.
A csillapított rendszer lengési periódusideje és a másodrendű rendszer időállandója közötti kapcsolat is felírható:
|
|
Szakirodalom
[1.1.] Einführung in die Mechatronik. Teubner Verlag. Stuttgart . 1997.
[1.2.] Taschenbuch der Regelungstechnik. Wissenschaftlicher Verl. Harry Deutch. Frankfurt a.M . 2003.
2. fejezet - A mechatronikai modellezés eszköztára
2.1. Energia módszer
A modellalkotás folyamatával kapcsolatosan már szó volt arról, hogy a mechatronikai rendszerek szabályozott rendszerek. Ez a megállapítás alapvetően a komplex rendszerekre vonatkozik, de nem zárja ki azt sem, hogy egyes komponenseket (szenzorok, aktuátorok stb.) is mechatronikai rendszereknek (részrendszereknek) tekintsünk. Ebben az anyagban mindkét rendszerformára látunk példákat.
A műszaki mechanika tudományterületén, világszerte túlnyomóan a Lagrange és Euler nevével fémjelzett energia módszert alkalmazzák dinamikai modellezésre. Ugyancsak az energia módszeren alapul a Rayleigh-módszer, amellyel elosztott paraméterű modellek kezelhetőek.
A Lagrange függvény a konzervatív rendszerekben fellépő két energiatípusra alapul. A Lagrange függvény általános koordinátákkal írja le a két energia összegét:
|
|

ahol
|
L |
L=T-U, a Lagrange függvény | |
|
T |
a rendszer kinetikai (mozgási) energiája | |
|
U |
a rendszer potenciális (helyzeti) energiája | |
|
q i |
az i-edik szabadságfok általános koordinátája | |
|
|
a qi általános koordináta idő szerinti deriváltja |

Lagrange mozgási egyenlete másodfajú rendszerre általánosan ismert, és alkalmazott modellezési célra a mechanika területén:
|
|
A fenti egyenletben „P” a rendszerben található energiatermelők és energiadisszipálók teljesítménye.
Feltételezve, hogy a potenciális energia nem függ a  -től, a Lagrange egyenlet az alábbi alakba írható:
-től, a Lagrange egyenlet az alábbi alakba írható:
|
|
A módszer előnye, hogy lineáris és nemlineáris mechanikai rendszerek esetében egyaránt alkalmazható. Elvben nem kizárt passzív villamos hálózatok modellezése sem, de igen bonyolulttá, nehezen kezelhetővé válhat a feladat. Egy mechatronikában szokványos elektromechanikai rendszer esetében például az általános koordinátákban való megállapodás után meg kell határozni az energia, illetve teljesítményfüggvényeket. Vigyázni kell a Rayleigh-féle disszipációs függvény helyes alkalmazására. Végül a Lagrange egyenletből létrejön a villamos és a mechanikai szimultán differenciálegyenlet. Laplace transzformálás és mátrix-vektor műveletekkel akár az átviteli függvény is felírható.
A fentiek illusztrálására a korlátozott terjedelem miatt legyen elegendő három egyszerű példát bemutatni!
Kéttárolós mechanikai rendszer modellje
Elsőként nézzünk egy konzervatív (gerjesztetlen), két energiatárolós (másodfajú) transzlációs mechanikai rendszert, amely egy koncentrált tömegből és egy ideális (lineáris karakterisztikájú és veszteségmentes) rugóból áll:
|
|

Fizikai inga modellje
A második példában egy fizikai inga modelljét mutatjuk be. Ez a rendszer, mint szabályozott szakasz, inverz formában és különféle szabadságfokokkal, a mechatronika egyik kedvelt példája. A rendszer stabilitása kizárólag állapotszabályozás révén biztosítható. A negatív inga egyik technikai megvalósítása a világszerte elterjedőben lévő „segway” elnevezésű egytengelyű, kerekes jármű. Ugyanakkor inverz formában kedvelt példája a biomechatronikának is, hiszen az álló (és járó) ember - valamint jó néhány más élőlény - stabilitása kifejezetten csak ilyen módon modellezhető.
Ha az egyszerű fizikai ingát (síkban mozgó) tetszőleges „φ” szöghelyzetben meg kívánjuk állítani, akkor ehhez „M” forgatónyomatékra van szükség.
Az szabályozáshoz szükséges matematikai modell, a nemlineáris differenciálegyenlet, az energia módszerrel írható fel, ahol a forgáspont és a súlypont közötti távolságot „l” jelöli:
|
|

A potenciális energia a gravitációs erőtérben negatív előjellel jelenik meg. A PM az a teljesítmény, amelyet a szabályozás révén a rendszerbe beviszünk, és PS a nemlineáris súrlódás veszteségi teljesítménye.
A mozgásegyenlet nemlineáris és a csapágyazás valóságos állapotot közelítő súrlódási nyomatéka miatt nem állandó együtthatós. MS a nemlineáris súrlódó nyomatékot jelöli:
|
|

DC motor modellje
A harmadik példa egy külső (villamos) gerjesztésű egyenáramú motor modellje, energia módszerrel. A motor ug gerjesztő feszültsége állandó. A gerjesztő tekercs és az armatúratekercs fluxuskapcsolódása Ψ(φ), amely függ a rotor szöghelyzetétől. A motor amatúra ellenállása „R”, nyugalmi induktivitása pedig „L”. „J” a motor tengelyére redukált (erről a későbbiekben még esik szó) tehetetlenségi nyomaték. A motor csapágyazásából eredő súrlódási veszteséget a „B” csillapítási együtthatóval modellezzük, mert viszkózus súrlódást feltételezünk. Az általános koordináták a „q” villamos töltés és a „φ” mechanikai szögelfordulás. A motor armatúrájára „uK” kapocsfeszültséget kapcsolunk. Potenciális energia nincs a rendszerben, mert nincs villamos kapacitás és nincsen mechanikai rugalmasság. Együtt van minden elem, amelyek segítségével az energia egyenlet felírható.
Az elektromechanikus rendszer összes kinetikus energiája:
|
|
Az energia disszipálók összteljesítménye:
|
|
Ezt a disszipációs teljesítményt felezni kell. A „P” teljesítmény parciális deriváltja ugyanis a  általános sebességkoordináta szerint általánosított erőt ad, feltéve, hogy az általánosított erő maga nem függ a
általános sebességkoordináta szerint általánosított erőt ad, feltéve, hogy az általánosított erő maga nem függ a  sebességkoordinátától. A disszipatív elemek esetében a Rayleigh-féle disszipációs függvényt kell behelyettesíteni, hogy a megfelelő általános erőösszetevőt megkapjuk:
sebességkoordinátától. A disszipatív elemek esetében a Rayleigh-féle disszipációs függvényt kell behelyettesíteni, hogy a megfelelő általános erőösszetevőt megkapjuk:
|
|

Az elektromechanikus rendszerbe villamos oldalról „viszünk be” teljesítményt:
|
|

A Lagrange egyenleteket a két koordinátára külön-külön írjuk fel.
A megfelelő parciális deriválások elvégzése után a „q” koordinátára az alábbi egyenletet kapjuk:
|
|
A mozgási indukció révén a motorban keletkező un. „belső” feszültségről tudjuk, hogy a motor szögsebességével van összefüggésben:
|
|

Az egyenáramú motor esetében jó közelítéssel elfogadható, hogy a fluxus kapcsolódás szögfüggése állandó, a szakirodalom ezt nevezi gépállandónak, vagy nyomatékállandónak:
|
|

A Lagrange egyenlet a „φ” koordinátára:
|
|
A két Lagrange egyenlet összefoglalható két egymással összefüggő, elsőrendű differenciálegyenlet formájában is:
|
|
Ennyi elegendő az energia módszer szerepének tárgyalására, mert ennek a munkának nem feladata a műszaki mechanika modellezési módszereinek ismétlő jellegű bemutatása. Ugyanakkor elengedhetetlen, hogy mielőtt a mechatronika két igen hatékony modellezési módszerét – a hálózati, és az impedancia módszert - öt fizikai-műszaki rendszertípusra kiterjesztve, általánosítottan ismertetnénk, hangsúlyozottan felhívjuk a figyelmet ezeknek, a mechatronikában igen hatékony modellezési módszereknek a korlátaira is.
A villamos, és egyszerűbb feladatok esetében a hőtechnikai és az áramlástechnikai rendszerek (beleértve az akusztikát is) tárgyalási módját vizsgálva a szakirodalomban, gyakran a hálózati módszerekkel találkozhatunk, amelyek alapja zárt rendszerek esetében természetesen ugyancsak az energia és anyag megmaradás törvénye. A „zárt rendszer” fogalom kihangsúlyozása nem véletlen, tudjuk, hogy a zárt rendszer határait a modellezés kívánalmainak megfelelően, de mi jelöljük ki.
2.2. Hálózati módszerek alapjai
A mechatronikai összetett rendszereket hálózati és impedancia módszerrel fogjuk modellezni. Ezek a módszerek a mechatronikára jellemző öt fizikai-technikai rendszertípus közül csaknem korlátozás nélkül alkalmazhatóak a
villamos hálózatok,
korlátozásokkal a
hőtechnikai
áramlástechnikai (folyadékos, pneumatikus és akusztikai)
és lineáris rendszerek esetén a
mechanikai transzlációs és
mechanikai rotációs
rendszerek leírásához.
A hálózati módszer természetesen az anyag- és energiamegmaradáson alapszik, és a módszer egy speciális „alfaja” az impedancia módszer, amely révén közvetlenül a rendszer átviteli függvényéhez jutunk. Az impedancia módszerrel jellegzetesen a villamosmérnöki gyakorlatban találkozhatunk, de bizonyos mértékben alkalmazzák egyéb műszaki területeken is. Egy leendő mechatronikai mérnöknek elengedhetetlen ismernie azokat a módszereket, amelyeket főként a villamosmérnökök alkalmaznak, hiszen a mechatronikai mérnök a gépészmérnökök mellett, a villamosmérnökökkel működnek együtt a legszorosabb formában. Lehetetlen, hogy az együttműködést éppen a „közös modellezési nyelv” hiánya akadályozza! Ez a közös modellezési nyelv pedig a hálózati és az impedancia módszer. Ebben a jegyzetben éppen ezért ezekkel a módszerekkel részletesen foglalkozunk, és kiemelt hangsúlyt helyezünk a gráfelmélet felhasználására a modellalkotás folyamatában, hiszen a struktúra gráfok a hálózati és az impedancia módszerek hatékony alkalmazásának eszköztárához tartoznak, különösen a mechanikai és termikus, valamint a vegyes, villamos-mechanikai-fluid-termikus rendszerek esetében. Ezeket a régebbi szakirodalomban elektromechanikus rendszerek kifejezés alatt találjuk meg, pl. A. Lenk: Elektromechanische Systeme 1. [2.1.] munkájában.
A vegyes technikai rendszerek hálózati és impedancia módszerekkel történő első igényes bemutatását R. H. Cannon: Dynamics of Physical Systems [2.2.] 1967-ban megjelent művében találhatjuk. A könyvben közölt ismeretanyag egyaránt alkalmas az egyetemi és a posztgraduális oktatásban való alkalmazásra. Ebben az időben még szó sem esett „mechatronikáról”, a tananyag a szabályozástechnikához elengedhetetlen modellezési munkához nyújtott segítséget. A rendszertechnikára alapuló modellezési szemlélet Európában sok helyütt csak igen lassan hódított tért, gépész területen általánosan jellemző volt a konzervatív elzárkózás. Németországban egyes műszaki egyetemeken viszonylag hamarabb, az 1970-es évek elején már kötelező jelleggel oktatták Elektromechanische Systeme, Elektromechanische Netzwerke, és hasonló elnevezések alatt. Magyarországon, a gépész oktatásban, az 1970-es évek végén került a „tűrt” kategóriában a szabadon választható tárgyak körébe, majd a 80-as években néhány szakirányban, az irányításelmélethez csatolva, alapozó, kísérő témaként a tantervekben is megjelent.
Jelen időszak mechatronikai témájú modellezési feladatait túlnyomó részben meg lehet oldani a hálózati és az impedancia módszerrel. Létezik azonban a mechanikai szakaszoknak egy szűkebb csoportja, amelyek modellezéséhez továbbra is csak az energia módszer alkalmazható. Ebbe a kategóriába tartozik a korábban, az energia módszernél említett „segway”, és minden hasonló, fordított ingát tartalmazó rendszer, hacsak nem elégszik meg a modellező a mozgás linearizálható tartományának szabályozásával. Ugyancsak energia módszerrel lehetséges csak modellezni az eddig megjelent legújabb „adaptronikai” rendszerek szakaszait, mert ezek többnyire nemlineáris, elosztott paraméterű rendszerek.
2.3. A hálózati és impedancia módszer energetikai háttere
A fizika a rendszerek leírásához állapotjelzőket alkalmaz. Ezek lehetnek extenzív (megmaradó) és intenzív (lokális, helyhez kötött) mennyiségek, valamint ezek leszármaztatott mennyiségei. Tekintettel arra, hogy a modern szabályozástechnika általánosan az állapottér modellt alkalmazza, kézenfekvő, hogy technikai rendszereink modellezéséhez ugyancsak az energetikai állapotjelzőket használjuk.
A témához kapcsolódóan ajánljuk Korondi Péter Rendszertechnika című elektronikus jegyzetének tanulmányozását.
Az extenzív mennyiség olyan fizikai mennyiség, amelyeknek értéke a rendszer mennyiségétől – ami az alkotó részecskék számával arányos – függ. Ezzel szemben az intenzív mennyiség független a rendszer mennyiségétől, nagyságától. Az extenzív mennyiségek additívak, mindig előjelesen összegződnek.
Az extenzív mennyiségek többsége zárt rendszerben un. megmaradó mennyiség, ezek a mechatronikában szokásos rendszerekben az impulzus, a perdület, a villamos töltés és a térfogat (összenyomhatatlan folyadékok esetében), illetve a tömeg.
A termikus rendszereket külön kell kezelni, mert a hőtanban másként értelmezik a zárt és nyitott rendszer fogalmát. A hőtani entrópiát és energiát jellege miatt ugyan az extenzív mennyiségek közé sorolják, így pl. Bihari P.: Műszaki termodinamika című jegyzetében [2.3.], de ezek nem megmaradó mennyiségek. Ugyancsak nem megmaradó mennyiség gázok esetében a térfogat sem. A hálózati modellezési módszer ennek ellenére sikeresen alkalmazható egyszerűbb feladatok esetében.
Az extenzív mennyiségek mellett léteznek intenzív, lokális, helyhez „kötött” mennyiségek is. Ezek az előbbi rendszertípus sorrendben a következők: sebesség, szögsebesség, villamos feszültség, nyomás és hőmérséklet. Ezeket a mennyiségeket nevezik a hálózatelméletben kereszt-vagy kapocsváltozónak (across varable, Differenzvariable, vagy Klemmvariable).
A kétféle mennyiség szorzatával a rendszerek többségében energiát kapunk, kivétel a termikus rendszer, ahol a hőenergia árama (teljesítmény), azaz a hőáram az átmenő változó. A hőtechnikai rendszerben „akadozik” a többi rendszerféleségre felírt „megmaradó mennyiség” kategória alkalmazása, hiszen a hőtechnikai folyamatokban sem az entrópia, sem a hőenergia nem megmaradó mennyiség.
Ha a tér két pontjának lokális változói (intenzívek) eltérő értékűek, és a két pont között passzív elem (energiatároló, vagy disszipatív elem) helyezkedik el, akkor az intenzív mennyiségek különbsége χ2-χ1=Δχ kiváltja a passzív elemen a megmaradó mennyiség áramlását, áramát. Ezt a változót nevezik a hálózatelméletben átmenő változónak (flow variable, Flussvariable).
Az energiatárolás jelenségét a hálózatelméletben nem az energia típusa (potenciális, kinetikai), hanem az energiatárolásban szerepet játszó átmenő változó, vagy a keresztváltozó segítségével írjuk le.
Fontos kiemelni több alapvető különbséget a termikus és a többi rendszertípus között. Erre utal az (Táblázat 2.1) táblázatban látható vastagabb elválasztó vonal a termikus rendszer felett. Egy hőtani rendszer akkor zárt, ha a tömeg-kölcsönhatás kivételével minden más energia jellegű kölcsönhatás megengedett. A többi fizikai rendszertípus esetében azért könnyebb a modellezés zárt rendszerként (nem hőtani értelmezésben), mert ezek esetében a fizikai folyamtok a környezettel való hőcsere idejéhez képest lényegesen rövidebb idő alatt lezajlanak. A disszipatív elemek pontosan azért jelennek meg az elemtáblázatban, mert tudjuk, hogy a modellezett folyamatainkban az energia egy része visszafordíthatatlanul hővé alakul.
A termikus rendszerek igen összetettek, energia és anyag áramlása, továbbá átalakulása jellemzi ezeket. A folyamatok leírása állapotjelzőkkel történik, ezek a pillanatnyi anyag és energia eloszlási állapotokat tükrözik. Az állapot leírása a hőtanban makroszkópikus mennyiségekkel történik. A rendszertechnika hálózatelméleti módszerének segítségével csak egyszerűbb termikus feladatok modellezhetőek, erre említünk két esetet. Ilyen lehet például a hőveszteségek modellezése egy villanymotor esetében. Tudjuk, hogy működés közben mechanikai és villamos energia alakul át hőenergiává, és feladatunk annak meghatározása, hogy a motor állórészén, valamint alkatrészein miként tárolódik a hőenergia, és miként terjed a hőáram (hőteljesítmény). Ugyancsak jól modellezhető például egy termoelektromos szenzor dinamikus viselkedése is. A dinamikus jelleg nem villamos, hanem termikus eredetű, a szerkezet hőellenállásaival és hőkapacitásaival (energia tárolók) van összefüggésben.
A termikus rendszerben az extenzív mennyiség energia, pontosan hőenergia, és ennek következtében az átmenő változó a teljesítmény lesz. A többi rendszer típus esetében az extenzív és az intenzív mennyiségek szorzata ad energiát. A hőenergia áramlása (hőáram, teljesítmény) mindig a magasabb hőmérsékletű ponttól az alacsonyabb irányában jön létre. A termikus rendszerekben nem található olyan passzív elem, amely a hőteljesítmény időbeli megváltozása révén energiát lenne képes tárolni. Ezért a termikus rendszerekben nincsen átmenő változóval energiát tároló elem.
Hasonlóképpen nincsen a pneumatikus rendszerekben sem „induktív” jellegű energiatárolás, mert a jellemző üzemi nyomáskülönbségek mellett nem jöhet létre visszafelé áramlás. Szabad térben, az akusztikában a kétirányú áramlásnak a csekély nyomáskülönbség miatt nincs akadálya, ezért egy hosszú csőhöz kapcsolódó üreg együttesen rezonancia jelenséget tud mutatni (üregrezonátor).
Az extenzív és az intenzív mennyiségeket, a hozzájuk kapcsolódó átmenő és keresztváltozókat, valamint az energiatárolókat a következő táblázatban foglaltuk össze.
|
Rendszer típus |
Intenzív (Keresztváltozó) |
Extenzív |
Extenzív árama (Átmenő változó) |
Energiatárolás keresztváltozóval |
Energiatárolás átmenő változóval | |
|---|---|---|---|---|---|---|
|
Mechanikai transzlációs |
Δv |
I=m ⋅ v |
|
|
| |
|
Mechanikai rotációs |
ΔΩ |
π=J ⋅ Ω |
|
|
| |
|
Villamos |
Δu |
q |
|
|
| |
|
Fluid |
Folyadékos |
Δp |
V, m |
|
|
|
|
Akusztikai |
q,v |
|
| |||
|
Pneumatikus |
q v |
|
nincs | |||
|
Termikus |
Δυ |
Q (ld.: szöveg) |
|
|
nincs | |
|
Megjegyzés: elemek Az akusztikai rendszerek esetében csillaggal jelöltünk két energiatároló elemet. A magyarázatot a passzív elemek táblázatánál láthatjuk. Az extenzív mennyiségek nem minden rendszer típusban tekinthetők megmaradó mennyiségeknek. | ||||||

















Szakirodalom
[2.1.] Elektromechanische Systeme 1. Verlag Technik. Berlin . 1971.
[2.2.] Dynamics of Physical Systems. McGraw Hill B. C.. New York – Tokyo . 1967.
[2.3.] Műszaki termodinamika. BME Elektronikus jegyzet. 2001.
[2.4.] Rendszertechnika. TÁMOP Elektronikus jegyzet. 2014.
3. fejezet - A hálózati módszerek eszköztára
A hálózati módszerek alkalmazásához szükséges ismereteket négy csoportba foglalhatjuk össze:
A változók származtatása és definiálása.
A passzív elemkészlet koncentrált paraméterű modellezéshez.
A források típusainak definiálása.
Az energia-átalakítók rendszerezése
3.1. A változók definiálása
A változók származtatását az előző fejezetben mutattuk be, amikor a hálózati módszerek energetikai hátterét taglaltuk. Ezek szerint az intenzív mennyiségeket keresztváltozónak, az extenzív mennyiségek áramát pedig átmenő változónak tekintjük.
A keresztváltozókat és az átmenő változókat több külföldi és hazai szakirodalomban kiemelten kezelik. Fodor György a Lineáris rendszerek analízise című munkájában [3.1.] ezeket a mennyiségeket egyenesen „kanonikus változóknak” nevezi.
3.2. Passzív elemkészlet
3.2.1. Összefoglaló elemtáblázat
A passzív elemkészletet leíró fizikai egyenleteket táblázatosan foglaltuk össze, és célszerűségből megjelenítettük az egyes elemek impedanciáit is. A hálózati módszer alkalmazása szempontjából különösen fontosak azok az összefüggések, amelyek egy-egy passzív elemen, energia-átalakítón a kereszt- és átmenő változók közötti kapcsolatot írják le. Ezek az egyenletek a mechatronika szakon tanulók számára nem jelentenek újdonságot, legfeljebb ezek rendszerezése.
Az impedancia módszer alkalmazása – amely ugyancsak hálózatelméleti alapokon nyugszik – a fentieken túlmenően öt fontos ismeretet feltételez. Az impedancia módszerrel a későbbiekben részletesen foglalkozunk, de a következő táblázatban, amelyben a kereszt- és átmenő változók közötti kapcsolatokat mutatjuk be, a teljesség kedvéért megjelenítjük az egyes passzív elemek impedanciáit is.
Az impedanciával (komplex ellenállás), és reciprok értékével az admittanciával (komplex vezetőképesség) előzetesen annyit kell tudni, hogy a táblázatban látható impedanciákat a fizikai egyenletek definíció szerinti Laplace transzformálása révén kapjuk. Az impedancia az „s” operátor függvénye, definíciója szerint:
|
|
Tekintettel arra, hogy s=jω, a leírás olyan rendszerekre alkalmazható, amelyek gerjesztései és válaszjelei Fourier analizálhatóak, azaz harmonikus függvényekkel felépíthetők, csak állandó együtthatókkal rendelkeznek, és lineárisak.
|
Rendszer típus |
Energiatárolás keresztváltozóval |
Energiatárolás átmenő változóval |
Disszipatív elemek | ||||
|---|---|---|---|---|---|---|---|
|
Fizikai egyenlet |
Impedancia |
Fizikai egyenlet |
Impedancia |
Fizikai egyenlet |
Impedancia | ||
|
Mechanikai transzlációs |
|
|
|
|
|
| |
|
Mechanikai rotációs |
|
|
|
|
|
| |
|
Villamos |
|
|
|
|
|
R | |
|
Fluid |
Folyadékos |
|
|
|
|
|
|
|
Akusztikai |
|
| |||||
|
Pneumatikus |
|
nincs |
nincs | ||||
|
Termikus |
|
|
nincs |
nincs |
|
| |




























A fenti táblázattal kapcsolatban több fontos megjegyzésre, magyarázatra van szükség:
A mechanikai transzlációs és rotációs rendszerek esetében a keresztváltozók indexében látható „R” betű arra utal, hogy ezek az energia-tárolók keresztváltozói csak a referenciára vonatkoztathatók. Az elemtáblázatban, az akusztikai energiatárolók esetében látható csillagozott jelölés arra utal, hogy az akusztika tudományterületén más fajta elnevezések szokásosak.
Az elemtáblázattal kapcsolatos további magyarázatok az itt következő alfejezetekben találhatók meg.
3.2.2. Mechanikai és villamos rendszerek energiatárolói
A három rendszertípust együtt tárgyaljuk. Három típusról lesz szó, mert a mechanikai egyenes vonalú mozgást végző rendszert el kell választani a forgómozgást végző rendszerektől. Sem a paraméterek, sem pedig a változók nem azonosak. Azt, hogy a két rendszer között merev test esetében jól leírható a kapcsolat, tudjuk. A kapcsolat leírásához ebben az esetben váltókat alkalmazunk. A váltók az energia átalakítók között vannak részletesen ismertetve.
Tömeg („tehetetlenség”)
A tömeg a keresztváltozóval (sebesség) tárol energiát . A tömeg esetében a kereszt- és átmenő változó közötti fizikai kapcsolatot a Newton második törvényéből

származtatjuk úgy, hogy a gyorsulás helyére a sebesség deriváltja kerül. Azt, hogy a tömeg a nehézségi erőtérben mozog, a gráf technika segítségével is kifejezzük, mert a tömeg gráf éle kizárólag a referenciához irányítható, és az él alsó felét szaggatott vonallal szokás jelölni. Ez látható például az 5.1. ábra ábrán.
Tehetetlenségi nyomaték (forgó mozgást végző merev test forgási tehetetlensége)
A mechatronikában a keresztváltozóval energiát tároló elemeket túlnyomórészt a forgó gépalkatrészek képezik. A tehetetlenségi nyomaték a szögsebességgel tárol energiát. Ezek állandó paraméter értéket képviselnek J=konst, mert a gépalkatrészek kiegyensúlyozására igen nagy gondot fordítanak. Newton törvénye rögzített tengely körül forgó merev testre is kiterjeszthető:

A szöggyorsulás helyére ugyancsak a keresztváltozó, a szögsebesség deriváltja kerül a hálózatelmélet szellemében. Az energia módszernél már jeleztük, hogy azon mechatronikai feladatok esetében, amelyek jellegzetesen nemlineáris rendszerek (pl. fordított inga, segway stb.), a matematikai modell felírásához a hálózati módszer nem alkalmazható. Ugyanakkor állandó „J” paraméterek esetében a hálózati módszer célravezetőbb, mint az energia módszer.
Rugómerevség (transzlációs)
A transzlációs mechanikai rendszerekben azon részegységeket, alkatrészeket modellezünk rugómerevségként, amelyek a rugalmas alakváltozás tartományában ér erőterhelés, és az erő-elmozdulás összefüggés lineáris összefüggéssel leírható (Hook-törvény). A „rugómerevség” modell-elemmel nem csak laprugót, vagy tekercsrugót, hanem gépelemeket is modellezünk, hiszen rögzítő csavarok, csapágyak, keretszerkezetek is lehetnek rugómerevségek a modellünkben. A rugalmas elem az átmenő változóval, az erővel tárol energiát. A rugalmas elem alakváltozása nem keresztváltozó, ezért a Hook-féle egyenletben az alakváltozást az alakváltozási sebesség integráltjával helyettesítjük:
Fontos a modellezésben tehát tudni azt, hogy a „rugómerevség” alatt nem csak lemez, vagy tekercsrugó rugómerevségét kell elképzelni. A rugalmas elem lehet fém, és lehet polimer alkatrész is, sőt mágneses és pneumatikus „rugó” is van. Minden esetben elengedhetetlen tudni, hogy a valóságban nem létezik „ideális” rugalmasság, csak az un. Kelvin modell által leírt forma, azaz a rugóval párhuzamosan megjelenik a veszteség is, nincs olyan rugalmas fém, amelynek alakváltozása során ne lépne fel a kristály deformációból származó belső veszteség. A polimerek esetében a precíz modell ennél még sokkal bonyolultabb.
Torziós rugómerevség
A transzlációs rugómerevség analógiáját látjuk a torziós rugómerevségben. A torziós rugó ugyancsak az átmenő változóval, a forgatónyomatékkal tárol energiát. Most ugyancsak ne korlátozzuk magunkat a „spirálrugó” modellezésére, habár a nemzetközi szakirodalom a jelölésre éppen egy spirálrugót szokott alkalmazni. Mechatronikai rendszereinkben csaknem minden forgó tengely torziós rugómerevséggel modellezhető, még precízebb a modellünk, ha vele párhuzamosan megjelenik a veszteség (belső csillapítás) is. A fizikai egyenlet a transzlációs analógiája, mert a torziós elem két vége közötti relatív elcsavarodás helyett a szögsebesség (keresztváltozó) integráltja jelenik meg:
Villamos kapacitás
A villamos rendszerekben a kondenzátor tárol energiát a keresztváltozóval. Ez első pillanatban furcsának tűnhet, hiszen köztudott, hogy a kondenzátor elektromos töltések tárolására alkalmas. Ha azonban deriváljuk az alap fizikai egyenletet, azonnal világossá válik, hogy a töltés deriváltjaként megjelenő villamos áram révén kapcsolatot tudunk teremteni kereszt és átmenő változók között:
A „kondenzátor” modell-elem alatt nem csak a kereskedelmi termékeket kell érteni. Látni fogjuk, hogy egy piezokerámia lapka is kondenzátorként viselkedik, mert a lapka két ellentétes felületén kialakított „töltésgyűjtő” fémréteg között szigetelőanyag – a piezokerámia - helyezkedik el.
Induktivitás
A villamos rendszerekben az induktivitás (vezető tekercs) az a technikai elem, amely az átmenő változóval, az árammal tárol energiát. Ha a kereszt és átmenő változók között keressük a kapcsolatot, akkor a fizikai egyenletből kell kiindulni. A nyugalmi indukció (önindukció) azt jelenti, hogy a vezető (tekercs) és a mágneses tér nem mozognak egymáshoz képest (vö. mozgási indukció). A jelenséget sokan ismerik a villanykapcsolók érintkezőjének „beégése” formájában, ha a terhelések között sok az induktív jellegű. Az áram megszakítása ugyanis olyan feszültséget indukál, amely a Lenz törvény értelmében a folyamatot továbbra is fenntartani igyekszik. Az indukált feszültség mind a bekapcsolás, mind pedig a kikapcsolás során létrejön. Ez az indukált feszültség károsítja az egyenáramú gépek (villanymotorok) kommutátorait és keféit, hiszen forgás közben sorozatos a kefék és az egyes kommutátor szegmensek közötti megszakítás és érintkezés. Ez a feszültség hozza létre a jól ismert és jól látható „kefeszikrázást”.
Az árammal átjárt vezető körül, illetve a tekercs belsejében és körülötte mágneses erőtér alakul ki (H). Az „l” hosszúságú és „N” menetszámú tekercs „H” mágneses erőtere, amelyet az „I” tekercsáram hoz létre, kellően hosszú tekercs közepén közelítőleg az alábbi módon számítható:

A mágneses erőtér és a mágneses indukció „B” közötti kapcsolatot az egyik Maxwell-egyenlet írja le. A mágneses fluxus „ΦB” az „A” felületet metsző indukcióvonalak számával fejezhető ki.
Ha az áram időben változik, akkor ez a változás a „ΦB” mágneses fluxus időbeli változását vonja maga után, ami a vezető (tekercs) két végpontja között villamos feszültség formájában jelentkezik.

Az anyagi (mágneses) és geometriai jellemzőket csoportosítva kapjuk a tekercs „L” öninduktivitását, és ennek felhasználásával a kereszt és átmenő változó közötti kapcsolatot:

Vigyázat, mert az öninduktivitás fentebb látható képlete egy adott tekercs elrendezésre érvényes. A mechatronikai feladatokban minden esetben meg kell határozni az adott konfiguráció öninduktivitását és a szimulációkhoz ki kell számítani a konkrét értéket. Egyszerűsíti a helyzetet, ha az induktivitás egy szervomotor induktivitása, mert ezt az értéket a katalógusok közlik, a meghatározásával nem kell bajlódni.
3.2.3. Disszipatív elemek modellezésének problémái
A „b” és „B” csillapítási tényezők csak durva közelítéssel álladó értékek. A hálózati módszerekkel felírt állandóegyütthatós rendszeregyenletekben – ha indokolt – helyettesíteni kell a „b” és „B” csillapítási együtthatókat leíró függvényekkel. A mechatronika mechanikai rendszereiben leggyakrabban a Coulomb és a Stribeck effektust is magába foglaló, ugyanakkor a nagyobb sebességnél (fordulatszámnál) viszkózus jellegű közelítő összefüggést alkalmazzák.
A legfontosabb az, hogy mindenki, aki modellezéssel foglalkozni kezd, tudatosítsa magában, hogy a mechanikai disszipatív elemek, a súrlódási együtthatóként definiált paraméterek, a villamos ellenállással nem analóg paraméterek! A mechanikai csillapítási tényező a villamos vezetőképességgel analóg, és éppen ezért egy mechanikai rendszer időállandóit egészen más módon kell szemlélni, mint egy villamos rendszerét. Látni fogjuk a hajtóművel foglalkozó fejezetben, hogy a terheletlen DC motor mechanikai időállandója nagyobb, mint a hajtóművel egybeépített motoré. Ebből nem szabad azt a hibás következtetést levonni, hogy a nagyobb mechanikai időállandójú motor dinamikai szempontból rosszabb. Éppen ellenkezőleg! A T=J/B időállandó képlet miatt érthető, hogy kisebb súrlódású rendszer időállandója nagyobb lesz. Egy „felpörgetett”, mozgási energiát tároló, forgó tárcsa (tehetetlenségi nyomaték) annál hosszabb ideig képes mozgásban maradni, minél kisebb a csapágyainak súrlódása. A kérdés gyakorlati oldalával a 4. fejezet fejezetben is foglalkozunk.
Az áttekintés érdekében bemutatunk néhány mechanikai súrlódási modellt, amelyeken kívül továbbiak is vannak, pl. Dahl-modell [3.3.], Lu Gre-modell [3.4.] stb. Általános érvényű nincsen, esetenként kell megvizsgálni ezek érvényességét, és a választott modellt méréstechnikai úton lehetőleg ellenőrizni kell.
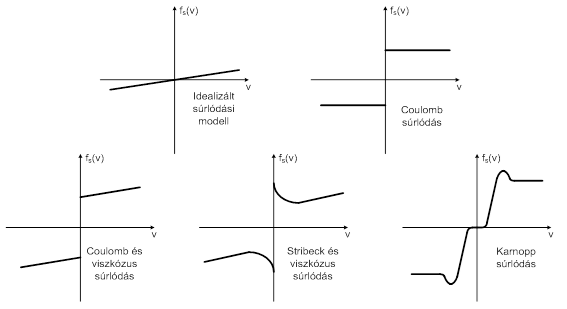
A fluid rendszereken belül, a folyadékos rendszerekben, „RF”, „RA”, és „RP” többnyire nemlineáris elemek, de lehetnek lineárisak is (lamináris súrlódási viszonyok, Poiseuille-féle áramlás esetén, Re<2300). RF a folyadék-ellenállást, RA az akusztikai ellenállást és RP a pneumatikus ellenállást jelöli.
|
|
A képletben látható jelölések magyarázatát lejjebb találjuk.
Minden olyan fluid áramlási ellenállás, amelyben megjelenik az áramló közeg sebességének négyzete, felírható más formában is. A nem lineáris ellenállás képletében a sebesség helyére – a felület figyelembe vételével a térfogatáram írható. A térfogatáram négyzetét bontva az egyiket az ellenállás definíciója szerint a p/qv =RF(qv) összefüggésben használjuk fel, míg a másikat abszolút értékével magában az ellenállás képletben vesszük figyelembe. Erre látunk a következőkben néhány példát:
Kilépési (belépési) veszteség (ellenállás):
|
|
Súrlódási veszteség (ellenállás):
|
|
Csőidomdarabok okozta veszteség (ellenállás):
|
|
A fenti képletekben az alábbi jelöléseket alkalmaztuk:
|
ρ |
: folyadék sűrűség | |
|
η |
: dinamikai viszkozitási tényező | |
|
l |
: csőhosszúság | |
|
λ S |
: csősúrlódási tényező | |
|
ξ ID |
: veszteségi tényező (értéke méréssel határozható meg, gyakoribb formák táblázatban találhatók) | |
|
d |
: csőátmérő |
Az akusztikai fluid alrendszerben is létezik ellenállás típusú disszipatív elem, ez az akusztikai ellenállás. Feladata hangelnyelő rendszerekben az, hogy a levegőrészecskék mozgási energiáját hővé alakítsa. Ezért az akusztikai ellenállás általában olyan szerkezet, amelyben porózus fedőanyag alatt laza szerkezetű kőzetgyapotot, vagy üveggyapotot találunk. Nem csak a laza szerkezetű, szálas anyagok, de a rések és kör keresztmetszetű nyílások is akusztikai ellenállást jelentenek. A nyílások felülethez viszonyított arányát külön tényezőkkel veszik figyelembe. Az akusztikai ellenállás paramétere az alábbiak szerint számítható:
|
|
A képletben „Ξ” a hosszra vonatkoztatott áramlási ellenállást jelöli, értékét méréssel határozzák meg.
A pneumatikus ellenállásnak, szakszóval „fojtásnak” fontos szerepe van az időzítésekben. Ezért azon túlmenően, hogy a pneumatikus rendszerekben is előfordulnak olyan ellenállások, amelyek szűkületek és idomok miatt okoznak nyomásveszteséget - hasonlóan a folyadékos rendszereknél bemutatott formában - léteznek szabályozható pneumatikus ellenállások, fojtások is.
3.2.4. Folyadékos rendszerek energiatárolói
Nyitott tartály folyadék kapacitása
A nyitott folyadéktartály fenéknyomása a referenciaként választott (pl.: külső nyomás) értékéhez viszonyítottan az alábbi képlettel számítható.

Töltés és ürítés esetében a tartály térfogatárama a folyadékfelszín felületének figyelembe vételével – amennyiben ez állandó érték – a folyadékoszlop magasságának változásával van kapcsolatban:
Ha a folyadékoszlop magasságváltozásának segítségével a két egyenletet összekapcsoljuk, akkor a folyadék kapacitás meghatározásához szükséges összefüggéshez jutunk:

A képletben a p1R nyomás az adott referenciához viszonyított fenéknyomás:
Csővezetékben áramló folyadék „induktivitása”(Folyadék tehetetlenség)
Régebbi rendszertechnikai irodalmakban ez a paraméter „folyadék inertivitásként” szerepel. Az energia tárolás a csővezetékben áramló közeg révén jön létre. A súrlódási jelenségektől eltekintünk, mert ezeket a disszipatív elemekkel modellezzük. Ebben az esetben egy kicsiny dV=Adx térfogatrészbe foglalt folyadék tömegre ható gyorsító erő a dx csőszakaszban fellépő dp nyomáskülönbségre vezethető vissza. Miután a súrlódó erőt kivettük a vizsgálatból, a nyomásból származó erő és a gyorsító erő tartanak egyensúlyt:

Állandó csőkeresztmetszet mellett a dV térfogatrész folyadék tömegére az alábbi összefüggést írjuk, és az „A” keresztmetszetre rendezzük:

Az erőegyensúly képletébe behelyettesítjük a keresztmetszetre kapott összefüggést:
Az erőegyensúlyban a tömeg nem játszik szerepet, csak a közeg sűrűsége:
A térfogatáram definíciója állandó csőkeresztmetszetet feltételezve:

A fenti egyenletből a térfogatáram időbeli változása állandó csővezeték keresztmetszet esetében:

A csővezeték dx hosszdarabján létrejövő dp nyomáskülönbség a behelyettesítés után:
Az „l” hosszúságú csővezeték két vége között (1 és 2 számmal jelölt pontban) létrejövő nyomáskülönbséget integrálással nyerjük:
Az egyenletben a folyadék „induktivitás” számítására az

összefüggés használható. Az elnevezés azért indokolt, mert a térfogatáram időbeli megváltozásából származó nyomáskülönbség egyenlete tagról-tagra (teljes) analógiát mutat a villamos induktivitásra érvényes összefüggéssel.
3.2.5. Akusztikai rendszerek energiatárolói
Az akusztikai rendszerek modellezése esetében tudnunk kell, hogy a folyamatokat leíró összefüggések bonyolultabbak. Egyrészt azért, mert koncentrált paraméterű modellezésnél tekintettel kell lenni arra, hogy a vizsgált frekvenciákon az adott rendszer geometriai méretei és a hullámhossz negyede miként viszonyulnak egymáshoz, ha üregekben és hosszabb nyílásokban vizsgáljuk az akusztikai jelenségeket, mert a hang szabad térben másként terjed. Már önmagában az is nagy különbség, hogy az akusztikai térfogatáram kör, vagy téglalap keresztmetszetű „csővezetékekben” jön létre, mert mindkettő másként viselkedik.
Zárt terekben, amelyek méretei sehol nem haladják meg a λ/4 értéket, a folyadékos rendszerekhez hasonló energiatároló elemeket találunk, a keresztváltozó a nyomás, az átmenő változó a térfogatáram. Szabad és fél-szabad akusztikai terekben ilyen elemek nincsenek, a keresztváltozó ugyancsak a nyomás, de az átmenő változó az „A” felület hiányában a részecske (pl.: levegő, víz stb.) „v” sebessége. Ez a sebesség nem összetévesztendő a hullámterjedés sebességével. A szabad tér (levegő) is rendelkezik impedanciával, de ezt hullámimpedanciának nevezzük, és értéke
|
|

ahol clev a hangterjedés sebessége meghatározott nyomású és páratartalmú levegőben. A két akusztikai „tér” egymáshoz illesztése azért különösen fontos, mert a hangtechnikai eszközök többsége (hangszóró, mikrofon stb.) úgy van felépítve, hogy ezekben kisebb csatornák és üregek mellett megjelennek olyan membrán felületek, amelyek a szabad, vagy fél-szabad akusztikai térrel kerülnek kapcsolatba. A szerkezet geometriai méretei és a hullámhossz viszonya különösen a nagyobb frekvenciákra készülő hangtompítók tervezése esetében játszanak szerepet. A kiáramló gázok útjába semmiféle akadály nem tehető, ugyanakkor lehetőség van a kiáramló gázok csővezetékére megfelelően méretezett akusztikai rezonátorokat (csőcsonkokhoz kapcsolódó üregek különféle méretekben) csatlakoztatni, és így egy kívánt frekvencia tartományban „hullámszűrőket” létrehozni. Hullámszűrőről azért lehet beszélni, mert a csillapítani kívánt hang frekvenciatartományához tartozó hullámhosszak negyedei rövidebbek, mint a hangtompító geometriai méretei. A téma a gépészetben és a mechatronikában a zajcsökkentés miatt kiemelkedő fontosságú, ezért javasoljuk az ide vonatkozó szakirodalmak részletes tanulmányozását.
Tehát az akusztikai rendszerekre is kiterjeszthető a folyadékos rendszerek elemkészlete, ha az adott rendszer geometriai méretei minden irányban kisebbek, mint a hullámhossz negyede. Ebben az esetben ugyanis még nem beszélhetünk a rendszeren belül hullámterjedésről.
Üreg akusztikai kapacitása *C A (akusztikai „rugalmasság”)
Akusztikai rendszerekben keresztváltozóval, azaz a nyomással az üreg tárol energiát, miután összenyomható közegről van szó. Az akusztikai szakirodalomban az üreg nem kapacitásként, hanem mint „akusztikai rugalmasság” jelenik meg. Az elnevezés teljesen indokolt, hiszen a gázok összenyomhatósága miatt egy üreg – főként, ha a nyílására egy dugattyút képzelünk – „légrugóként” viselkedik. A pneumatikus rendszerekre is igaz ez, a mintafeladatok bemutatása során a légrugóra külön hangsúlyt fektetünk. Az üreg mechanikai „rugalmasságának” az oka egyértelmű, ha a zárt üreghez egy rövid csőszakaszon gördülő membránnal (nincs mechanikai súrlódás a dugattyú és a csőfal között) dugattyút csatlakoztatunk. A rendszer egy fordító váltót képez (girátor), ahol az eltérő típusú rendszerek (mechanikai-pneumatikus) eltérő típusú változóit köti össze az átalakító állandója:

A fordító váltó többek között ellentétes típusúra „váltja” az energiatárolókat is: Az akusztikai kapacitás mechanikai oldalon rugalmasságként jelenik meg.
Az akusztikai kapacitás (rugalmasság) paraméterének kiszámításához egy nyílással ellátott zárt üregből indulunk ki. Feltételezzük, hogy az üreg falain keresztül nem megy végbe hőcsere, miután az akusztikai folyamatok (rezgések) gyorsak.
Ismert, hogy ilyen esetekben

ahol „κ” az adiabatikus exponens. Az akusztikai üregben kis nyomásváltozások és kis térfogatváltozások jellemzőek. Azt keressük a variációszámítással, hogy a két mennyiség változása miként függ össze? Ehhez deriváljuk a kiinduló egyenletet:

A levegő nyugalmi nyomása p0=105 N/m2, az üreg nyugalmi térfogata „V0” és levegő esetében κ=1,4.
A dinamikai modellezéshez a nyomás és a térfogat időbeli változására van szükségünk:
Végül olyan összefüggést kapunk az átmenő és a keresztváltozó között az akusztikai kapacitásra, amely alakjában a folyadékos rendszerrel analóg, de a kapacitás, mint paraméter igen eltérő. Tudott, hogy kifelé áramlás esetén csökken, ellentétes irányban pedig nő az üreg nyomása a környezethez képest, ezért az előző egyenlet átrendezése után az előjelet már nem tüntetjük fel:

Akusztikai induktivitás *L A (akusztikai „tömeg”)
Akusztikai rendszerekben a térfogatáram is képes energiát tárolni, akár csak a folyadékos rendszerek esetében láttuk. Az akusztikában a nyomás ingadozása jellemzően az atmoszférikus nyomás tartományában marad, nem úgy, mint a pneumatikus rendszerek esetében, ezért a kétféle energiatároló között lengés lehetséges. Az akusztikai induktivitás paraméterét hasonló módon számítjuk, amint a folyadékos rendszerekben, ezért csak az összefüggéseket mutatjuk be:

Ugyanakkor meg kell jegyezni, hogy kis „l” értékre, azaz, ha például egy vékony lemezben található nyílásról van szó, az akusztikai induktivitás értékére irreálisan kis érték adódna. Ilyen esetben szokás egy nyílás-korrektúrát figyelembe venni, mert a részecskék egy hányada a nyílás mindkét oldalán együtt mozog a nyílásban található levegővel:
A korrektúra tapasztalati értékei függenek a nyílás formájától.
Kör keresztmetszetű nyílás esetén:

Téglalap keresztmetszetű nyílás esetén, ha „b” a nyílás szélessége:

3.2.6. Pneumatikus rendszerek energiatárolója
A pneumatikus elemek a mechatronika igen fontos építőkövei, a fluid rendszerek alrendszerét képezik. Tárgyalásukra azért kerül sor az folyadékos és akusztikai rendszereket követően, mert a pneumatikában csak kétféle elem fordul elő, és ezek lényegében már le vannak írva a megelőző rendszerek tárgyalása során.
A pneumatikában csak ellenállás és kapacitás létezik, hiszen a csővezetékekben a tápnyomás lehetetlenné teszi a hosszabb csőbe zárt levegő lengését. A pneumatikus rendszerben nem a szabad levegő nyomása körüli, kismértékű ingadozások jellemzőek, amint az akusztikai rendszerekben láttuk.
A linearizált pneumatikus kapacitás levezetését nem mutatjuk be külön, mert az megegyezik az akusztikai kapacitással (üreg). A lineáris kapacitás alatt azt értjük, hogy a „V0” nyugalmi térfogat esetében a legtöbb esetben átlagos üregmérettel számolunk, amelynél a dugattyú két véghelyzete közötti különbség felét vesszük figyelembe. A munkahenger mozgása során ugyanis változik a térfogat, és ez nemlineáris kapacitást eredményez. Nagypontosságú szervopneumatikus szabályozások esetében ezt a nemlinearitást figyelembe veszik, és ennek következtében, természetesen, állapottérrel modellezik a pneumatikus rendszert.
3.3. Ideális források
Az ideális források elengedhetetlenül fontosak a hálózati módszerek tárgyalásához, hiszen ezek adják a rendszerek gerjesztéseinek túlnyomó többségét.
Három forrás típust különböztetünk meg:
Átmenő változó forrás
Keresztváltozó forrás
Vezérelt forrás
A forrásokat azért nevezzük ideálisnak, mert közös jellemzőjük, hogy ésszerű terhelések mellett megtartják előírt értéküket.
Átmenő változó forrás
Ez a forrás típus az adott rendszertől függően lehet erő, forgatónyomaték, áram, térfogatáram, vagy hőáram. A belső ellenállása ideálisan végtelenül nagy, ezért a hálózatban szakadásként jelenik meg. Valós ellenállását egy vele párhuzamosan kötött ellenállással jelenítik meg. Általában összetett rendszer, amelyet külső energiaforrás táplál. A legjobban érthető gépészeti (hidraulikai) megfelelője a fogaskerék szivattyú. A folyadék (térfogat) kiszorítással működő forrás valós belső ellenállást mutat a hálózat felől nézve. Van valós vesztesége (ellenállása), az un. résveszteség, az a térfogatáram-hányad, amely a fogak és a ház tömítetlenségein visszaáramlik. Az újabb ábrázolásokon jelképe egy kör, benne vízszintes vastagított vonal utal a szakadásra.
Keresztváltozó forrás
Az előző pontban látható sorrendben ez a forrás típus lehet sebesség, szögsebesség, feszültség, nyomás, vagy hőmérséklet. Belső ellenállása ideálisan zérus, ezért a hálózatban rövidzárként jelenik meg. Valós ellenállását egy vele sorosan kötött ellenállással jelenítik meg. Általában összetett rendszer, amelyet külső energiaforrás táplál. A legjobban elképzelhető gépészeti megfelelője a centrifugál szivattyú. Más, szemléletes gyakorlati példa az akkumulátor. Terheletlen (üresjárati) kapocsfeszültsége nagyobb, mint a terhelt állapotban mérhető feszültség, hiszen a zárt áramkörben folyó áram miatt a belső ellenálláson is esik feszültség. Jó állapotú akkumulátornál ez az ellenállás kis értékű, jól példázza az ideális forrás esetét. Újabb ábrázolásokon a jelképe egy kör, benne függőleges vastagított vonallal, ami a hálózat ellenállás nélküli folytatására utal.
Források egyenértékűsége (átszámítások)
Legfőképpen az impedancia módszer alkalmazása során kínál előnyöket a két forrás típus közötti átszámítás lehetősége. Amint látni fogjuk, az impedancia módszer lényege, hogy minden egyes forrást tekintve a rendszert aktív és passzív részre lehet szétválasztani. Erről a módszer bemutatása során még részletesen lesz szó. A módszer végeredményeként általában keresztváltozó, vagy átmenő változó osztó alakhoz jutunk. Ha a forrás és a keresett mennyiség eltérő típusúak, akkor szükség lehet az átszámításra. Az ideális átmenő változó forrást, és a vele párhuzamosan kapcsolt ellenállást „Norton” alaknak, míg az ideális keresztváltozó forrást és a vele sorba kapcsolt ellenállást „Thevenin” alaknak nevezi a szakirodalom. A Norton alak üresjárati keresztváltozója az egyenértékű Thevenin alak forrás értékének felel meg. Ez a maximális keresztváltozó érték, amit az adott forrás szolgáltatni képes, és ezt az Ohm törvény alkalmazásával határozzuk meg. A Thevenin alakot „rövidre” zárva, az Ohm törvény alkalmazásával megkapjuk a forrásból kivehető maximális átmenő változó értékét, ez lesz az egyenértékű Norton alak forrás értéke.
Vezérelt források
Működésükhöz segédenergiára (tápfeszültség, tápnyomás stb.) van szükség. Ideális esetben a kimenet nincs visszahatással a bemenetre. A bemeneti mennyiséggel vezérlik a kimenő mennyiség értékét. Jelképi ábrázolása két gráf élet mutat, amelyek közül a kimeneti oldalon található egy forrást jelképez, amelyhez a bemeneti oldal élétől szaggatott gráf él vezet. A gráf él irányítása a bemenet felől a kimenet felé mutat. Ilyen vezérelt forrás látható például a (14.8. ábra) ábrán. Három egyszerű példa jól mutatja működésüket, és jelentőségüket a mechatronikában. Egyik legegyszerűbb vezérelt forrás a tranzisztor. Egy kollektor ellenálláson keresztül tápfeszültségre kapcsolva tranzisztort, a bázis-emitter feszültséggel (bemenő jel) vezérelhető a kollektor-emitter áram, vagy ennek folytán a kimenő feszültség. Összetettebb eszköz a műveleti erősítő. A differencia feszültséggel (szimmetrikus bemenőjel) vezéreljük az erősítő aszimmetrikus kimenő feszültségét. A szimmetrikus feszültség azt jelenti, hogy a földponthoz képest a bemenetnek két bemeneti pontja van, míg a kimeneti pontot egyedül a földponthoz viszonyítjuk. Az erősítőn belül visszahatás nincsen. A nyílt hurkú erősítés elméletben végtelen nagy, az erősítőt külső, negatív visszacsatolással lehet stabil működésűvé tenni. A zárt hurkú erősítés értéke jellemzően 105 körül van. Az erősítők feszültség-illesztése érdekében (a kimenő jelszint továbbítása minél kisebb hibával) az erősítő bemenő ellenállása nagy (MΩ…GΩ nagyságrendű), míg a kimenő ellenállás relatív kis értékű (30…70 Ω). A pneumatikus rendszerek esetében, fix tápnyomás mellett, gyakran szabályozzák egy fojtószelep segítségével a rendszerbe beáramoltatott levegő mennyiségét (térfogatáram). Ebben az esetben mechanikai elmozdulás (szelepház és működtető relatív elmozdulása) segítségével vezérlik a pneumatikus oldal átmenő változó forrását.
3.4. Energia átalakítók
Az alábbiakban az energia átalakítókkal kapcsolatos, legfontosabb általános tudnivalókat foglaltuk össze. Az energia átalakítók konkrét elemzését az egyes példáknál találjuk meg (szenzorok, aktuátorok, mozgás átalakítók).
Az energia átalakítók elengedhetetlenül fontosak a komplex mechatronikai rendszerek leírásához, mert ezek teszik lehetővé a különböző rendszerrészek közötti folyamatok modellezését. Régebbi szakirodalmak ezeket az eszközöket az „elektromechanikus” rendszerek között tárgyalták, de ez természetesen erős szűkítés, mert minden, korábban felsorolt technikai rendszertípus között megtalálhatjuk az ideális és a valós energia átalakítás lehetőségeit.
Az ideális energia átalakító veszteségmentes, a bemeneti és kimeneti teljesítmények megegyeznek, a hatásfok 100%. Teljesen egyértelmű, hogy a valóságban ilyen eszközök nem léteznek. Minden energia átalakító tartalmaz, vagy tartalmazhat energia tárolókat és disszipatív elemeket. Sok esetben ezek az elemek az átalakító működéséhez elengedhetetlen alkatelemek. Fontos ugyanakkor kiemelni, hogy modellezésük során az energia átalakítást minden esetben egyetlen paraméterrel, dimenzióval rendelkező együtthatóval, vagy puszta számmal jellemezzük. Az átalakító részét képező minden passzív elemet a hálózat többi passzív elemével együtt vesszük figyelembe. Az energia átalakítás mindig kétirányú, de a fizikai jelenséget leíró törvény nem feltétlenül azonos, jó példa erre az elektrodinamikus átalakító.
Az energia átalakítók alapvetően négypólusok. Ennek ellenére lehetséges, hogy a bemeneti és kimeneti oldalnak van közös keresztváltozója (pl.: közös földpont), és ezzel az átalakító lényegében „hárompólussá” alakul. Jelölésük a gráf technikában két gráf él, az alacsonyabb keresztváltozó felé irányítottan, és a két élet szaggatott vonallal megadott ellipszis, vagy fektetett nyolcas köti össze. A kapcsolatot jelképező szaggatott vonal fölé (alá) szokás írni az átalakítót jellemző paramétert. Impedancia módszer esetében szabályos négypólust kell rajzolni, a „dobozba” (téglalappal jelzett átviteli tag) vagy az átalakító két egyenletét, vagy csak a paramétert szokás beírni. Az átmenő változók mindkét oldalon a tagba befelé mutatnak.
Három típus különböztethető meg:
Transzformátorok
A transzformátorok azonos típusú rendszerek azonos típusú változóinak kapcsolatát írják le. Ebbe a csoportba tartozik a villamos transzformátor, a gépészetben a hajtómű, az egy-és kétkarú emelő kis elfordulások esetében, vagy a differencia-dugattyú. Jelölésük gráf esetében a két élet összekötő fektetett ellipszis. Ezt láthatjuk a (7.7. ábra) ábrán. Impedancia hálózatban négypólusként jelenik meg, az átmenő változók mindkét oldalon befelé mutatnak. Tekintettel a definícióra a transzformátorokat jellemző paraméter dimenzió nélküli, gondoljunk a villamos transzformátor primer-szekunder tekercsei menetszámainak arányára, vagy a hajtómű módosítására.
Váltók
A váltók a mechatronikai rendszerek jellegzetes átalakítói, mert a vegyes rendszerek hálózati módszerekkel való tárgyalását teszik lehetővé. Eltérő típusú rendszerek azonos típusú változóinak kapcsolatát írják le. Ebbe a csoportba tartoznak az elektrodinamikus átalakítók, a fogaskerék-fogasléc kapcsolat, a vonóelemes mozgás-átalakítók minden formája, a menetes orsós, napjainkban legfőképpen a golyósorsós mozgás-átalakítók. Jelölésük gráf esetében a két élet összekötő, szaggatott vonalú fektetett ellipszis, hasonlóan a transzformátorokhoz, felette (alatta) a váltót jellemző paraméterrel. Ezt a (6.15. ábra) ábrán láthatjuk. Impedancia hálózatban négypólusként jelenik meg, az átmenő változók mindkét oldalon befelé mutatnak. A definícióból következik, hogy a váltókat jellemző paraméter dimenzióval rendelkezik, hiszen eltérő a két oldalon elhelyezkedő rendszerrész típusa.
Fordító váltók
A fordító váltók a mechatronikai rendszerek másik fontos, és jellegzetes átalakítóinak csoportját képezik. Eltérő típusú rendszerek eltérő típusú változói között teremtenek kapcsolatot. Ilyen átalakítók a hidraulikus és pneumatikus munkahengerek, és ennek segítségével írható le a piezoelektromos energia átalakítás. Jelölésük gráf esetében a két élet összekötő, szaggatott vonalú fektetett nyolcas, felette (alatta) a váltót jellemző paraméterrel. Ilyen gráf ábrázolást látunk a (6.1. ábra) ábrán. A paraméter itt is rendelkezik dimenzióval, hiszen eltérő típusú fizikai rendszerekről van szó. Impedancia hálózatban a fordító váltó is négypólusként jelenik meg, az átmenő változók mindkét oldalon befelé mutatnak. A „blokkba” vagy az átalakító két egyenletét, vagy a paramétert szokták beleírni.
Együtt van tehát minden olyan eszköz, amely a mechatronikai – jellemzően vegyes típusú – rendszerek hálózati és impedancia módszerrel történő, egyszerű leírásához szükséges: A változók, a passzív elemkészlet, a források és az energia átalakítók.
3.5. A hálózati és impedancia módszer alkalmazásának szabályai
A 4. fejezetben néhány egyszerű feladaton mutatjuk be a hálózati és impedancia módszerek alkalmazását. Ezt követően a legfontosabb mechatronikai aktuátorok, szenzorok és mozgás átalakítók dinamikai elemzésére kerül sor külön fejezetekben. Az építőelemek bemutatását komplex mechatronikai, szabályozott rendszerek tervezése és szimulációja követi.
A fejezetben igyekeztünk tömören összefoglalni azokat az ismereteket, amelyekre a módszerek sikeres alkalmazása érdekében szükség van.
3.5.1. Melyik változót milyen módszerrel keressük?
A keresett változó típusa, és az alkalmazandó módszer összefüggenek. Ha eldöntöttük, hogy a vizsgált rendszer lineáris, tehát hálózati (impedancia) módszerrel modellezhető, akkor a következő kérdés minden modellezésénél az, hogy mi a keresett „kimeneti” változó? A célszerűen (ésszerűen) alkalmazott módszer kiválasztását ennek a kérdésnek kell alávetni.
Hálózati módszer esetében, ha egy keresztváltozó keresett, akkor célszerű csomóponti módszert alkalmazni, míg ha átmenő változó, akkor a hurok módszert. Impedancia módszer esetében az a kérdés, hogy a keresett változó milyen impedancián, vagy impedanciák eredőjén jelenik meg? Ha keresztváltozót keresünk, akkor az átalakítások során célszerűen keresztváltozó osztóhoz, míg egy keresett átmenő változó esetén átmenő változó osztóhoz törekszünk eljutni. Ezeknél egyszerűbb forma nem létezik.
Hálózati módszerek esetében a lineárisan független egyenletek száma azért lényeges kérdés, mert több ismeretlen változó esetében nyilvánvalóan integro-differenciál, ritkábban differenciál egyenletrendszerhez jutunk. Lineáris esetben a továbblépés úgy lehetséges, ha az egyenletrendszert Laplace transzformáljuk. A matematikában szokásos még a differenciáloperátor bevezetése is, de a mérnöki gyakorlatban a Laplace operátor alkalmazása célravezetőbb, hiszen sok esetben, végső soron majd a frekvencia átviteli függvény meghatározása lesz a cél. A Laplace operátor kínálja ezt a lehetőséget s=jω helyettesítéssel (hiszen definíciója szerint s=jω). Ha az egyenletek nem függetlenek egymástól, akkor az egyenletrendszerből felírt mátrix-vektor egyenlet mátrixa (elemei jellegre impedanciák, admittanciák, vagy vegyes típusúak) szinguláris lesz, és nem invertálható. Ennek folytán a keresett változó(k)ra nem lehet felírni a rendszeregyenletet.
A lineárisan független egyenletek száma és a rendszer rendszáma között nincs összefüggés, ezt gyakran eltévesztik. A rendszám a független energiatárolók számával egyezik meg. A független jelző kiemelt fontosságú. Az energiatárolók „szimpla” összeszámolása ugyanis nem elegendő, mert a források típusa, elhelyezkedése és az energia átalakítók határozzák meg a független tárolók számát. Ennek bemutatására a későbbiekben látunk még feladatokat.
3.5.2. Hálózati módszerek
Lineárisan független csomóponti egyenletek száma
Elméletben a struktúra gráf alapján meghatározható csomópontok (szelvények) száma alapján lehet eldönteni a lineárisan független csomóponti egyenletek számát. A témával részletesen foglalkozik például a [2.4.] szakirodalom, itt csupán a gyakorlati alkalmazás néhány problémájára hívjuk fel a figyelmet. Az egyenletek száma a gráf fa elemszámával egyezik meg. Köznapi nyelven fogalmazva „cs-1”, a csomópontok száma mínusz 1, hiszen a gráf fa csomópontjainak száma mindig eggyel kevesebb, mint az elemszáma, mert egy elemhez két végpont, azaz csomópont tartozik. Ez azonban csak elméletben, elméleti gráfokra igaz, mert technikai rendszerek esetében figyelembe kell venni, hogy a csomópontok közül nem mindegyik „valódi” csomópont. Lehetséges egy szelvénybe két, vagy több csomópontot is belefoglalni, de nem célszerű műszaki rendszerek esetében. A gyakorlatban az sem mindegy, hogy melyik csomópontokat jelöljük ki. Az a célszerű, ha az ismeretlen keresztváltozókhoz tartozó csomópontokra írjuk fel a csomóponti egyenleteket.
Lineárisan független hurokegyenletek száma
Elméletben a struktúra gráf alapján meghatározható gráf pótfa elemeinek száma alapján lehet eldönteni a lineárisan független hurokegyenletek számát. A pótfa a fa kijelölése után visszamaradó elemekből áll össze. Ez azonban szintén csak elméletben igaz, mert technikai rendszerek esetében a források és átalakítók ebbe keményen beleszólnak. Célszerűbb a kérdést úgy megfogalmazni, hogy a lineárisan független hurokegyenletek száma megegyezik a független hurkok számával. A dolog igen egyszerű, mert mindazon hurkok függetlenek egymástól, amelyek legalább egyetlen elemükben különböznek egymástól. A hurkokat egy technikai gráfban – elméletileg - természetesen többféle módon fel lehet venni. A gyakorlat szempontjából az a helyes, ha a vizsgált elemen keresett átmenő változó egyetlen hurokváltozóval azonos. Ellenkező esetben két, vagy több hurokváltozó összegeként (különbségeként) adódik a keresett mennyiség. Másként fogalmazva: szomszédos hurkok rendelkeznek egy, vagy több közös elemmel. A hurkokat és ezzel a hurokváltozókat célszerű úgy kijelölni, hogy a vizsgált elem ne legyen közös.
3.5.3. Impedancia módszer
A módszer bemutatása a 4. fejezetben, gyakorlati példákon történik, itt csak a módszer eszköztárát foglaljuk össze.
Aktív-passzív részre történő szétválasztás
Az impedancia módszer esetében is első lépés a keresett mennyiség kijelölése. Ha ez keresztváltozó, és több párhuzamos, vagy soros impedancia eredőjeként jelenik meg, akkor az impedanciák eredője lesz a hálózat „passzív” része, vagy más néven „terhelés”. A keresett keresztváltozó természetesen megjelenhet egyetlen impedancián is, ebben az esetben ez az impedancia önmagában lesz a passzív „rész”. Ha a keresett mennyiség átmenő változó, akkor ebben az esetben is óvatosan kell eljárni. Lehetséges, hogy az adott átmenő változó nem csak egyetlen impedancián, hanem a vizsgált tagon, és az utána következő impedanciák eredőjén, együttesen lép fel. Az így kijelölt impedancia, vagy az impedanciák eredője képezi a passzív rendszert, ennek értékét a szétválasztáskor létrejövő kapcsok felől „betekintve” kell kiszámítani. Körülbelül úgy kell eljárni, mintha az aktív rész helyébe „képzelnénk magunkat”, és a „terhelés” irányába néznénk.
Minkét verzióra érvényes, hogy a visszamaradó impedanciák és források alkotják az un. „aktív” részt. Vigyázni kell azonban arra, hogy az aktív részt képező új forrás nem minden esetben azonos az eredeti forrással! Ha a szabad kapcsokra egy eredeti keresztváltozó-forrás csak keresztváltozó osztón keresztül jut el, akkor ezt figyelembe kell venni az új aktív forrás meghatározásakor! Hasonlóképpen kell eljárni az esetleges új átmenő forrás kiszámítása során is. Az aktív rész eredő belső impedanciáját a szabad kapcsok felől nézve kell számítani.
Szuperpozíció szabálya
Lineáris rendszerben, több forrás (mindegy, milyen típusúak) esetében nehézkessé teheti a módszer alkalmazását, hogy a szuperpozíció szabálya alapján minden egyes forrás hatását külön-külön kell vizsgálni a keresett passzív részen, majd a hatásokat előjelhelyesen összegezni kell. Egy adott forrás a többi forrást úgy „látja”, mint annak belső ellenállását. A kiválasztott forrás felől nézve a hálózatban rövidzárral helyettesítjük a keresztváltozó forrásokat, és szakadással az átmenő változókat. Ezek után összevonjuk az aktív rész impedanciáit, és kiszámítjuk az aktív rész belső impedanciáját. Ha a forrás átszámítására is szükség van, akkor ezt is el kell végezni.
Források átszámítása
A Norton alak Thevenin formába, illetve fordított irányban átszámítható, úgy, ahogy ezt a források bemutatásával foglalkozó fejezetben bemutattuk.
Különböző típusú rendszerek impedanciáinak egymásba való átszámítása
A vegyes rendszerek tárgyalását rendkívüli módon leegyszerűsíti az, hogy a különböző típusú rendszerek impedanciái az energia átalakító(k) paraméterének felhasználásával átszámíthatóak egymásba. Ilyen esetek főként az aktuátorok és aktív szenzorok dinamikai modelljeinek meghatározása során fordulnak elő. Ha ez az egyenértékűség nem volna érvényes, akkor az impedancia hálózatok egyszerűsítése vegyes rendszerek esetében nem lenne lehetséges. A gyakorlottság és a keresett változó típusa dönti el, hogy egy háromféle típusú alrendszert tartalmazó rendszer melyikében végezzük el a számításokat és az összevonásokat. Egy elektrodinamikus nyomásszenzor (dinamikus mikrofon) háromféle alrendszerből áll össze: akusztikai, mechanikai és villamos. Tekintettel arra, hogy a kimenőjel villamos mennyiség, a szakirodalomban azt látjuk, hogy a két másik rendszer impedanciáit egyenértékű villamos impedanciákká számítják át. Az átszámításhoz szükség van az átalakítók mindkét egyenletére.
Az átszámítást látni fogjuk a 6. fejezetben, a szenzorok és az aktuátorok modellezése során, de érdemes ezen a helyen összefoglalva is bemutatni az impedanciák egyenértékűségét. A következőkben egymás után bemutatjuk a váltó, a transzformátor és a fordító váltó esetében alkalmazott átszámításokat.
Elsőként nézzünk egy váltót, legyen ez az elektrodinamikus átalakító. Kiindulás minden esetben az átalakító két egyenlete. Jelen esetben az egyik egyenlet a Lorentz erőn, a másik az indukciós törvényen alapul, az igen részletes levezetést a 6.3. fejezetben találjuk. Ebben az esetben (ez nem általános) két külön fizikai törvény írja le a két irányban érvényes összefüggéseket.
|
|

Az „nv” váltó paraméter a DC motor esetében maga a gépállandó, vagy nyomatékállandó lesz, jele KM, más váltóknál esetleg geometriai paraméter, például a golyósorsós mozgásátalakító esetében h/2п, ahol „h” a menetemelkedés.
Az átmenő változókra felírt egyenletben zárójelbe került az előjel, mert az impedancia egyenérték kiszámítása során ennek nincs jelentősége.
Ha a két egyenletet elosztjuk egymással, akkor az admittanciák között kapunk összefüggést:
|
|
azaz mindkét oldalon admittanciákat látunk. Ezek reciprok értéke az impedancia, az átszámítás tehát elvégezhető.
|
|
Fontos kiemelni, hogy az átalakító paraméterének négyzete - dimenzióját tekintve - összetett! Az átalakító paramétere csak számértékét tekintve azonos a két egyenletben! Látható, hogy dimenziójuknak különbözniük kell. Az elektrodinamikus váltó (forgó mozgás) esetében az átmenő változók közötti paraméter dimenziója mNm/A, esetleg Nm/A, a keresztváltozók közötti paraméteré pedig Vs/rad.
Hasonló módon kell eljárni az átalakítók egyenleteinek felhasználásával a transzformátorok és a fordító váltók esetében is.
A hajtómű transzformátor típusú átalakító, amelynek az egyenletei a következőek. Az 1-es index a bemeneti (behajtás), a 2-es a kimeneti oldalt (kihajtás) jelöli:
|
|
A két egyenletet elosztjuk egymással:
|
|

Látható, hogy mindkét oldalon azonos rendszertípushoz tartozó impedanciák szerepelnek:
|
|

ahol nT=i, a módosítás. A mechatronikában lassító, nyomatéknövelő hajtóműveket alkalmazunk, tehát i>1. Az impedanciák közötti átszámítás az alapja a géptervezésben alkalmazott „redukálásnak”. A redukálás azt jelenti, hogy a bemeneti és kimeneti oldal tehetetlenségi nyomatékait nem lehet algebrai úton összegezni. Attól függően, hogy melyik oldalról vizsgáljuk a rendszert, a tehetetlenségi nyomatékokat a módosítás négyzetével, vagy annak reciprokával kell súlyozni az összegezés során. A kihajtó oldalra redukálva a behajtó oldal tehetetlenségi nyomatékát, látjuk, hogy azt i2-tel kell szorozni:
|
|

Ha a behajtás, tehát a motor felől nézzük a rendszert, akkor a kihajtó oldal tehetetlenségi nyomatékát (esetleg több eredőjét) i2-tel osztva kell a behajtó oldali értékhez, például „n” db bemenő oldali tehetetlenségi nyomaték összegéhez hozzáadni:
|
| ||
|
|

Az átszámítás, redukció gyakorlati alkalmazására a későbbi tervezési feladatokban visszatérünk még (golyósorsós szakasz, fogazott szíjas szakasz méretezése, motorválasztás).
A fordító váltók esete kissé bonyolultabb, a dualógia (duálisan analóg rendszerek) miatt. Az energiatárolók ellentétes típusra váltanak, mert ellenkező esetben az „s” operátortól való függés benne maradna az átszámítás képletében. A források típusa is ellentétesre vált, és megváltozik a kapcsolás jellege is. Sorosan kapcsolt impedanciákból párhuzamosan kapcsoltak, és párhuzamosan kapcsoltakból soros kapcsolásúak lesznek.
Példaként a közismert hidraulikus/pneumatikus munkahengert vizsgáljuk. A negatív előjel nem minden fordító váltó esetében jelenik meg, ebben az esetben arra utal, hogy az „A” dugattyú felület normál vektora és az „F” erő ellentétes irányúak. Az impedancia átszámításnál az előjelnek nincs szerepe, ugyanúgy, mint a transzformátor és a váltó esetében láttuk.
|
|
Osztjuk a két egyenletet egymással (figyelmen kívül hagyva az előjelet), és látjuk, hogy közvetlen módon impedanciákhoz admittanciák tartoznak:
|
|
Olyan impedanciákat és admittanciákat kell tehát egymáshoz rendelni, amelyek esetében az „s” operátor kiegyszerűsíthető:
|
|
A gyakorlati tapasztalatot igazolja, hogy a pneumatikus kapacitás (összenyomható közeggel töltött üreg) mechanikai szempontból rugalmasságnak „érződik”, a rugómerevség értéke az üreg kapacitásából számítható:
|
|
ahol p0 a külső nyomás, V0 az üreg (dugattyú) kiinduló térfogata, κ az adiabatikus kitevő.
A további ismereteket az adott rendszerek vizsgálatánál mutatjuk be.
Osztó szabályok alkalmazása az átviteli függvény felírásához
Az impedancia módszer tulajdonképpen „rajzos”, egyszerűsítő módszer. A végső alakig több lépésben kell átalakítani a kapcsolást, amíg végül a legegyszerűbb alakhoz jutunk.
Az aktív és passzív részre szétválasztott rendszer összevonások utáni kapcsolása alapján az átviteli függvény közvetlen felírására a következő lehetőségek vannak:
Keresztváltozó osztó, ha a mind a keresett mennyiség, mind pedig a forrás keresztváltozó.
Átmenő változó osztó, ha a keresett mennyiség és a forrás átmenő változó.
Ohm törvény, ha a két változó különböző.
Szakirodalom
[3.1.] Lineáris rendszerek analízise. Műszaki Könyvkiadó. Budapest . 1967.
[3.2.] Grundlagen der technischen Akustik. Akademische Verlagsgesellschaft. Leipzig . 1968.
[3.3.] A Solid Friction Model. The Aerospace Corporation. Technical Report. 1968.
[3.4.] Revisiting the LuGre Model. IEEE Control Systems Magazine. 2008.
4. fejezet - Egyszerű példák hálózati és impedancia módszer alkalmazására
- 4.1. Torziós tengely és tárcsa dinamikai modelljei keresztváltozó forrással
- 4.2. Torziós tengely és tárcsa dinamikai modelljei különböző változatokban
- 4.3. Állapottér modell formáinak létrehozása
- 4.4. Impedancia módszer MK meghatározására
- 4.5. Forrás egyenérték számítása
- 4.6. Szuperpozíció elvének alkalmazása több forrás esetén
- Szakirodalom
A bemutató jellegű feladatokat didaktikai szempontok alapján tettük sorrendbe. Kezdetben, kevésbé összetett példákon a források, a transzformátor típusú átalakító és a rendszám, valamint a lineárisan független egyenletek száma közötti kapcsolatokat szemléltetjük. Ezt követően, vegyes típusú rendszerek vizsgálatát energia átalakító alkalmazásával mutatjuk be. Tekintettel arra, hogy gépészeti alapról indul ki a mechatronika ismeretanyagának elsajátítása, mechanikai forgó rendszerek vizsgálatával kezdjük a módszerek bemutatását. A vizsgált rendszerek természetükből adódóan olyanok, hogy lineáris rendszeregyenlettel írhatók le, de persze ennek nem feltétlenül állandóak az együtthatói. A mechatronikai forgó rendszerek túlnyomó többsége esetében olyan tehetetlenségi nyomatékokat kell modellezni, amelyek kifejezetten kiegyensúlyozottak, ezért értékük forgás közben állandó. Ilyenek a különféle motorok forgórészei, a tengelyek és a tengelyekre szerelt tárcsák, alkatrészek többsége. Az ilyen rendszerek esetében indokolt a hálózati, vagy impedancia módszerek alkalmazása. Ha a torziós rugalmasságok szögfüggését, vagy a csillapítások szögsebesség függését is figyelembe kívánjuk venni, ennek a rendszeregyenlet felírása után nincsen semmi akadálya, a kiindulásként állandónak vett paramétereket helyettesítjük a megfelelő függvénnyel.
Figyelem! A kanonikus változók jelölése a (Táblázat 3.1) táblázatában látható. Minden további fejezetben ezt a jelölési módot alkalmazzuk. Ha mód van rá, akkor kisbetűvel az időbeli változót, nagybetűvel pedig ennek Laplace transzformáltját jelöljük. Vannak természetesen kivételek, ha az adott kis, vagy nagybetű hagyományosan mást szimbolizál. Egy-két példát kiragadva azonnal érthetővé válik a probléma. A mechatronikában a szögsebességet mindkét tartományban nagy omegával (Ω) jelöljük, mert a kis omega (ω) a villamosságtanban és az automatikában a körfrekvenciát jelenti. Továbbá nem jelölhetjük kis m-mel az időfüggő forgatónyomatékot, mert „m” hagyományosan a tömeget jelöli.
4.1. Torziós tengely és tárcsa dinamikai modelljei keresztváltozó forrással
Az első példa igen egyszerű, két tárolós (másodrendű) rendszer. Az irányítástechnikában ezt a tagot PT2-vel jelölik (két tárolós, arányos tag). Ezen a példán ugyanakkor be fogjuk mutatni mindhárom matematikai modellt, az állapottér modell esetében ráadásul kétféle változatot is.
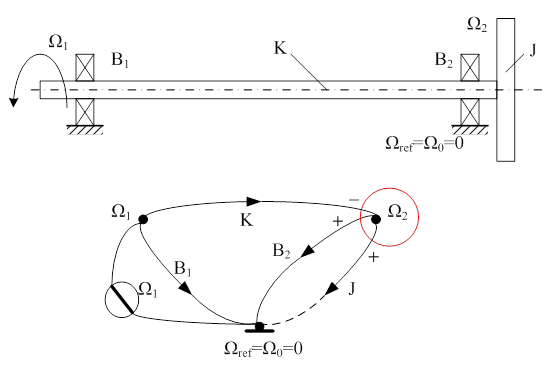
Az ábrán egy viszonylag hosszú, elcsavarodásra képes tengely baloldali végén szögsebesség forrást látunk, amely például egy DC motor és a hozzá kapcsolt nagy módosítású hajtómű kimenetét jelképezheti. A tengely másik végén egy szíjtárcsa látható, amely a továbbiakban a forgó mozgást alakítja át egyenes vonalú mozgássá.
Ezt a váltót még nem vizsgáljuk a példában, erre később kerül sor, mert ebben a fejezetben, egyszerű eseteken (max. másodrendű rendszereken) mutatjuk be és hasonlítjuk össze a módszereket. A tengely forgását két végén gördülőcsapággyal biztosítjuk.
A gráf megszerkesztése a független keresztváltozók (csomópontok) kijelölésével kezdődik. Minthogy az irányított gráf élek mellett az adott elem paramétere van feltüntetve, világos, hogy ez az ábrázolási mód az időtartományban érvényes. Esetünkben 3 ilyen csomópont van, a tengely két csapágyazásánál és a referenciánál, amelynek szögsebesség értéke legyen zérus Ω0=0. A forrás keresztváltozó, ezért az első csomóponthoz rendelt az Ω1 szögsebesség a referenciához viszonyítottan ismert, előírt érték, hiszen ez a hajtómű kimenete. Az Ω1 forrással párhuzamosan kapcsolt B1 csillapítás (csapágy) nem játszik szerepet, mert a keresztváltozó értéke rá van „kényszerítve”. A három csomóponti változó közül csak egyetlen ismeretlen, az Ω2. Ezt az egyenlet szám csökkenést jeleztük a csomóponti és hurok egyenletek számával foglalkozó fejezetben. Nem lehet tehát azt a gráf szabályt a műszaki példákban gondolkodás nélkül alkalmazni, miszerint „a csomópontok száma mínusz egy=lineárisan független csomóponti egyenletek száma”.
Legyen keresett az Ω2 keresztváltozó, azaz a tárcsa szögsebessége. Tehát a fentebb leírtak miatt felírjuk Ω2 csomópontra a csomóponti egyenletet.
Minden csomópontra, illetve szelvényre igaz, hogy az átmenő változók előjelhelyes összege zérus. Az általános átmenő változót célszerűen Φ-vel jelöljük, a példában ez a forgatónyomaték:
|
| ||
|
|


Az előjelek „önkényesek”, de a logikát a teljes gráf minden csomópontjára érvényesíteni kell. Azaz, ha a kifelé mutató irányított gráf élek előjelét pozitívnak választottuk, akkor a befelé mutatóké csak negatív lehet. Nincs akadálya annak sem, hogy egy csomópontba csak befelé, vagy csak kifelé mutassanak az irányított élek, de a kész rendszeregyenleten látni fogjuk, hogy az elgondolásunk nem volt helyes. Az irányítottság - a termikus rendszerek esetét kivéve - nem jelenti azt, hogy az átmenő változók csakis a nyíllal kijelölt irányba „folyhatnak” Ellenkezőleg. Az előjelek csak egy pillanatnyi, feltételezett állapotot rögzítenek, és lehetővé teszik az egyenletrendszer felírását.
A csomóponti egyenletbe behelyettesítjük a passzív elemek fizikai egyenleteit:
|
|

Ebben az esetben az egyenlet differenciálásával jutunk a rendszeregyenlethez, és Laplace transzformálás után az átviteli függvényhez, miközben „K” leosztásával a másodrendű rendszerekre jellemző alakot igyekszünk létrehozni:
|
|
Ha, amint a fejezet elején jeleztük, a paraméterek értékei nem állandóak, akkor a következő lépésben lehetőség nyílik a megfelelő függvények beírására.
|
|
Ettől kezdve azonban már csak digitális számítógépes szimuláció révén ismerhetjük meg a kimenőjel időbeli viselkedését.
Laplace transzformálás útján juthatunk az átviteli függvényhez:
|
|

Az átviteli függvény előállítása nem öncélú. A hagyományos szabályozókörök stabilitás vizsgálatai (zárt és felnyitott körökre vonatkozóak egyaránt) ezen a rendszeregyenlet formán nyugszanak.
A frekvencia átviteli függvényt (frekvencia menetet) az s=jω helyettesítés után kapjuk:
|
|

A függvényből abszolút érték előállítása után a logaritmus képzésével és 20-as faktorral való szorzással előállítható a Bode diagram amplitúdó „menete”, amelynek dimenziója a „dB” (decibel), az Arc képzés révén pedig a fázis „menet”:
|
|
Rendszeregyenlet nem csupán a differenciálegyenlet és az átviteli függvény lehet, hanem az állapottér modell is. Ez utóbbi forma – mint tudjuk – a modern szabályozástechnika alapja, és a digitális számítógépes szimulációk forrásnyelve is. Adott rendszer állapottér modellje többféle módon előállítható. Ha az n-ed rendű differenciálegyenletből, vagy az átviteli függvényből indulunk ki, akkor az állapottér modell (ÁTM) kanonikus alakját kapjuk. Ez a forma kedvező, ha az állapotszabályozás stabilitását kell beállítani, ugyanakkor nem feltétlenül vezet olyan ÁTM-hez, amelyben minden állapotjelző valós, és mérhető is. Ebben a mintapéldában ez még nem jelentkezik problémaként, hiszen a két állapotjelző Ω2 és ε2 (szögsebesség és szöggyorsulás). De, gondolatban emeljük csak meg a differenciálegyenlet rendszámát eggyel, és azonnal látni fogjuk, hogy a szöggyorsulás deriváltja már nem valós állapotjelző, és ennek folytán nem is mérhető.
Kanonikus ÁTM alak:
|
|
Az állapotjelzők nemzetközileg elfogadott jelölését alkalmazva átalakítjuk a differenciálegyenletet:
|
|

|
|
Ha „K” és „B” paraméterek nem állandóak, akkor a két elsőrendű differenciálegyenlet (un. Cauchy-féle normál alak) számítógépes szimulációval oldható meg. Ha a paraméterek konstansak, akkor az ÁTM mátrixos alakba írható:
|
|
A szokásos jelölésekkel:
|
|

Ha az állapottér modellt nem a kanonikus alakban kívánjuk előállítani, akkor a fizikai és mérhető állapotjelzőket, amelyek átmenő, vagy keresztváltozók, az integro-differenciál egyenletből kiindulva kell létrehozni:
|
|
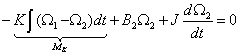
A torziós rugómerevséggel rendelkező tengely energia állapotát az MK átmenő változóval, mint állapotjelzővel írjuk le. A tárcsa energia állapotának leírására pedig Ω2 keresztváltozó szolgál. Ezek az állapotjelzők fizikai „tartalommal” bírnak, és mérésük megfelelő szenzorokkal megoldott.
Így tehát egy lehetséges másik ÁTM az alábbi módon definiálható:
|
|

|
| ||
|
|
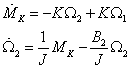
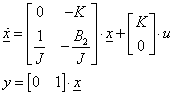
Fontos észrevenni, hogy mindkét ÁTM rendszermátrixában a főátló csak zérust, vagy negatív előjelű tagot tartalmaz. Ez egy passzív, nem visszacsatolt rendszer esetében elvárható is, hiszen ez a feltétele a stabilitásnak.
A modellezési módszerek által adható kép akkor válik teljessé, ha ezen a feladaton bemutatjuk az impedancia módszert is. A gráf egyszerűen átalakítható impedancia hálózattá, hiszen a gráfok a hálózatok leírására szolgálnak. Az egyes éleken téglalapok jelképezik az impedanciákat, az idő tartományban szokásos irányított gráf élek helyett. Paraméter helyett minden elemnél már az impedanciát kell feltüntetni, az ábrázolás operátor tartományban történik.
Az ábra baloldalán a rendszer impedancia hálózata látható, amelynél a bemeneti oldalon elhelyezkedő csapágy impedanciáját már figyelmen kívül hagytuk. A jobboldali képen a hálózat már szét van választva passzív és aktív részre. A passzív rész itt két párhuzamos impedancia eredője, mert közös keresztváltozójuk a keresett Ω2.
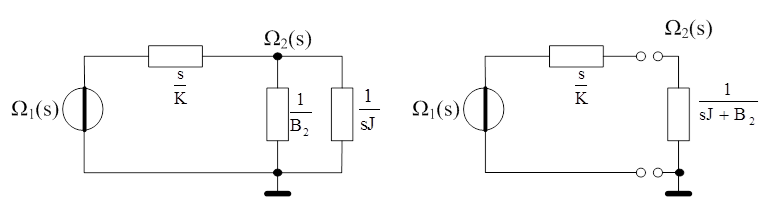
Az aktív rész belső impedanciája s/K, az új forrás változatlanul Ω1, mert terheletlen kapcsokon mérhető keresztváltozó érték (üresjárati) is ez. Keresztváltozó keresett, és keresztváltozó a forrás. Ebben az esetben az átviteli függvényt közvetlenül a keresztváltozó osztó adja:
|
|
Az impedancia módszer ebben az esetben - minden kétséget kizáróan - néhány lépésben azonnal eredményhez vezetett. A villamosmérnöki gyakorlatban ezért kedvelt módszer, de, amint látható, eredményesen lehet mechanikai rendszerek, sőt minden technikai rendszer esetében is alkalmazni.
4.2. Torziós tengely és tárcsa dinamikai modelljei különböző változatokban
Az első példában bemutatott, igen egyszerű, két tárolós (másodrendű) rendszert célszerű bemutatási céllal tovább vizsgálni. Elsőként bemutatjuk, hogy elegendő csupán a forrás típusát megváltoztatni, azonnal megváltozik a rendszer és így a gráf is. Legyen a példában a forrás az Mbe forgatónyomaték. A B1 csapágycsillapítás immár nem mellőzhető, hiszen az Ω1 keresztváltozóhoz tartozó csomópontban a nyomatékforrás által szolgáltatott átmenő változó megoszlik két részre: egyrészt arra fordítódik, hogy „leküzdje” a csapágy súrlódó nyomatékát, másrészt továbbhalad a torziós tengelyen a tárcsa felé. Ebből adódóan más lesz a lineárisan független csomóponti egyenletek száma is, mert két „valós” csomópont jön létre.
Tekintettel arra, hogy az előző feladatban a csomóponti módszert már szemléltettük, ebben a feladatban a hurok módszert mutatjuk be, és célszerűen átmenő változóra keressük a rendszeregyenletet. Legyen ez a változó az MK torziós nyomaték, mert erre a változóra később az impedancia módszer alkalmazása eléggé tanulságos lesz.
Az elektrotechnikában újabban, az átmenő változó forrás esetében használatos jelölés mellé egy nyilat tettünk. Ez a nyíl a hagyományos jelölési módnál a forrást jelképező körben helyezkedik el. Átmenő változó forrásokat ésszerűen, minden esetben a rendszer olyan csomópontjai felé kell irányítani, amelyekhez rendelt keresztváltozó nem a referencia. A gráf élek irányítottságán nem változtattunk. A hurok-felvétel „kaszkád”, (egymás után következő) sorrendben történt. Ez egy célszerű forma, mert szabályos lesz az impedancia mátrix, könnyen ellenőrizhető, nincs-e hiba a felírásban.
Nagyon fontos kihangsúlyozni, hogy a gráfon látható hurok kijelölés nem kedvező, ha B1, vagy B2 jelű csillapítók nyomatékát kellene meghatároznunk. Ebben az esetben a keresett változó két nyomaték különbségeként adódik, több a számítási munka. Ahogy korábban már leírtuk, úgy kell kijelölni a hurkokat, hogy azt az elemet, amelyen egy átmenő változót keresünk, csak egy hurok érintsen.
Úgy határozunk, hogy a csomópontokból kifelé irányuló élek legyenek pozitívak. A gráfon látszólag három hurok látható, de az első hurok változója nem ismeretlen, ez a forrás, tehát ide nem írunk fel hurokegyenletet. Annál inkább nem lehetséges ez, mert Mbe ismert, és ez nem keresztváltozó.
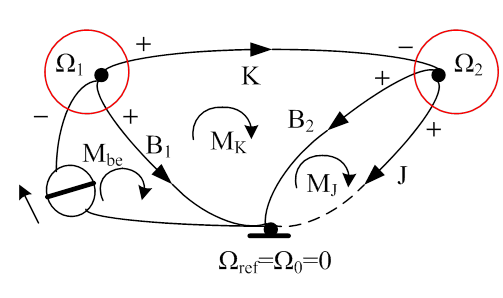
Ismert, hogy egy hurok körüljárása során, az elemeken megjelenő keresztváltozók előjeles összege zérust kell, hogy adjon. Az általános keresztváltozót χ-vel (görög chi) jelöljük.
|
|

Ennek megfelelően a két hurokegyenlet az alábbi formában jelenik meg:
|
|
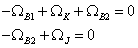
Behelyettesítjük a fizikai egyenleteket, és előáll a szimultán differenciálegyenlet rendszer:
|
|
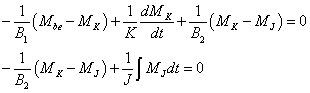
Amennyiben az állapottér modellt kell felírni, a legjobb, ha a szimultán differenciálegyenleteket felhasználva vezetjük be az állapotjelzőket. Ezek az energiatárolóknak megfelelően az alábbiak lehetnek:
|
|

Tehát a torziós tengelyen fellépő nyomaték és a tárcsa szögsebessége. Az állapottér modellre még visszatérünk, elsőként az átviteli függvényt határozzuk meg.
Ha az átviteli függvény, vagy a differenciálegyenlet meghatározása a cél, akkor a Laplace transzformálást követően, a szimultán differenciálegyenleteket mátrix-vektor egyenletbe foglaljuk össze:
|
|
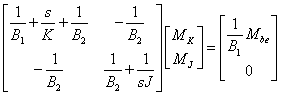
A mátrix minden eleme impedancia, ezért impedancia mátrixnak szokás nevezni. Az egyenlet tulajdonképpen az általánosított Ohm törvény:
|
|
A mátrixban szabályosság fedezhető fel, köszönhetően a csomóponti egyenletek célszerű felvételének. A főátló minden eleme pozitív, és egy-egy ismeretlen változót megtestesítő csomópontot érintő impedanciákat foglalja magába. A főátlóra szimmetrikus a mátrix, és elemei negatívak. Az átló elemei azoknak az impedanciáknak felelnek meg, amelyek a hurokváltozóknak megfeleltetett hurkok közös elemei. A jobboldalon jogosan jelenítettünk meg keresztváltozó vektort, ugyanis a Thevenin ekvivalencia szerint az átmenő változó forrás és a mellette párhuzamosan kapcsolt impedancia egyenértéke keresztváltozó forrás lenne:
|
|

A következő lépés előtt eldöntjük, hogy mindkét változót (forgatónyomatékokat), vagy csupán az egyiket keressük? Ha mindkettőt, akkor az impedancia mátrixot invertálni kell:
|
|
Az inverz mátrix kiszámítása során meg kell határozni az eredeti mátrix adjungáltját és a determinánsát. Ez utóbbi művelet az oka annak, hogy a hálózatelmélet bevezetése során kikötöttük, hogy csak lineárisan független egyenletek írhatóak fel. Ellenkező esetben a determináns zérus lesz. Fokozottan ügyeljünk arra, hogy adjungált mátrix kiszámítása során az aldeterminánsok képzése után még egy sor-oszlop cserét is végre kell hajtani.
Amennyiben csak egy változó, esetünkben a torziós nyomaték MK(s) keresett, célszerű a Cramer-szabályt alkalmazni. A számlálóban a determináns MK-hoz tartozó, első oszlopát kell helyettesíteni az egyenlet jobb oldalán található bemeneti vektorral:
|
| ||
|
|
Közös nevezőre hozzuk az átviteli függvény nevezőjét, és az „s” operátortól független kifejezéssel beosztjuk az átviteli függvény számlálóját és nevezőjét is. Érdemes ugyanis az átviteli függvény nevezőjét a szabályozástechnikai gyakorlatban alkalmazott formára alakítani, azaz az átviteli függvény nevezőjében az „s” operátortól független tag legyen =1. Ez a célszerű alak, mert egyszerű az állandósult állapot meghatározása. A Laplace transzformáció idevonatkozó szabálya szerint:
|
| ||
|
|
A „szabályos” alak létrehozásához általában be kell osztani a kapott nevező s-től független kifejezésével az átviteli függvény számlálóját és nevezőjét is. Tekintettel arra, hogy az „s” operátor dimenziója [r/s] (radián/secundum), mellette szorzóként kizárólag [s] (secundum=másodperc) dimenziót adó kifejezés állhat, és ebben az értelemben tovább, az operátor hatványainak megfelelően [sn]. A „radián” dimenzió nélküli.
|
| ||
|
|

ahol
|
|
Minden számításnál, különösképpen a bonyolultabb kifejezések esetében „kötelező” elvégezni ezt a dimenzió vizsgálatot. Hibás eredmény, vagy bármely hibás köztes lépés esetén azonnal láthatóvá válik a hiba, ha a paraméterek dimenzióit SI mértékegységekben behelyettesítjük. Ezt a „normálást” a korábbi átviteli függvényeken is elvégeztük, a fenti eset már kissé bonyolultabb, ezért látványosabb az átalakítás. A forgatónyomatékok között felírt átviteli függvény dimenzió nélküli, hiszen azonos dimenziójú változók között teremt kapcsolatot.
Az átviteli függvényből az is leolvasható, hogy állandósult állapotban, tehát tranziens folyamatok lecsengése után, a csapágyak csillapításának aránya határozza meg a tengelyen megjelenő torziós nyomatékot, ahol természetesen a forrástól távolabbi disszipatív elem a mérvadó.
4.3. Állapottér modell formáinak létrehozása
Az állapottér modell mindkét változatának meghatározása is tanulságos lépéseket tartalmaz. Egyrészt azért, mert a valós állapotjelzőkkel felírt változat eredménye nem egy lépésben adódik a szimultán differenciálegyenlet rendszerből. Másrészt pedig azért, mert az átviteli függvényből, visszavezetéssel adódó un. „normál” állapottér alak előállítása sem egyszerű, hiszen az átviteli függvény számlálójában van „s” operátor.
Nézzük először a valós (kanonikus) állapotjelzőkkel adódó formát, amelyek a feladat bevezetőjében bemutatott módon, az energiatárolóknak megfelelően az alábbiak lehetnek:
|
|

A probléma megértése érdekében megismételjük a szimultán differenciálegyenleteket:
|
|
Az első egyenletből MK-ra, a másodikból Ω2 -re írjuk fel az elsőrendű differenciálegyenletet. Látható, hogy mindkét egyenletben MJ változót ki kell fejezni a két állapotjelző segítségével, mert ezek „idegen testek” az állapottér modellben. Elsőként a második egyenletből algebrai egyenletet formálunk, és kifejezzük MJ-t úgy, hogy az integrál kifejezést helyettesítjük az eredeti változóval, hiszen az állapotegyenlet integrált nem tartalmazhat. Az integrál minden esetben maga az egyik állapotjelző lesz, azaz kereszt-vagy átmenő változó. Ez a hálózati módszer korábban már jelzett, nagy előnye:
|
|
A kapott MJ változót behelyettesítjük az első szimultán differenciálegyenletbe, és rendezzük az MK állapotjelző deriváltjára.
|
|
Az állapottér modell második (több ilyen típusú energiatároló esetében i-edik) egyenlete ilyen típusú feladatoknál az integrál kifejezésből (kifejezésekből) adódik.
Mivel MJ változó nem szerepelhet az egyenletben, ezért a korábban már felhasznált összefüggést ismételten alkalmaznunk kell az eliminálására:
|
|
Befejezésül felírjuk mátrixos alakban az állapottér modell főegyenletét valós, mérhető állapotjelzőkkel.
|
|
Az így kapott változatban nincs szükség segédegyenletre, ha csak az állapotjelzőket tekintjük kimeneteknek.
Nem így az átviteli függvényből visszavezethető forma esetében. Itt két probléma jelentkezik. Az első az, hogy az egyik állapotjelző fiktív változó, azaz nem fizikai mennyiség lesz. A második pedig az, hogy az átviteli függvényből felírt, Laplace transzformált egyenlet jobb oldalán a visszatranszformálás után a bemenőjel deriváltját kapjuk. Ezt azért kell kerülni, mert nem minden jeltípus deriváltja állítható elő nehézségek nélkül, márpedig az állapottér modellnek általános érvényűnek kell lennie. A gerjesztés (bemenet) deriváltként nem maradhat a modellben.
|
|

ahol  helyettesítést alkalmaztunk.
helyettesítést alkalmaztunk.
Nem folytatjuk az inverz Laplace transzformációval, mert látható, hogy az eredmény zsákutcához vezetne. Jobb oldalon ugyanis idő tartományban megjelenne a gerjesztés deriváltja.
Helyette formális átalakítást végzünk el az átviteli függvényen, olyat, amely eredményeként egy, az új állapotjelzőket, valamint a kimenetet adó részt szét lehet választani szorzat formájában. Két átviteli függvényt kapunk, amelyek közül a második nyilvánvalóan nem „igazi” átviteli függvény, hiszen a számlálóban az operátor fokszáma magasabb, mint a nevezőben. E problémától a cél érdekében ezúttal eltekintünk:
|
|

Az első átviteli függvényből az állapottér modell főegyenlete, míg a másodikból a kimeneti, vagy segédegyenlet adódik.
Az átviteli függvényeket egyenlet formájára rendezzük, majd beszorzás után végrehajtjuk az inverz Laplace transzformálást:
|
|
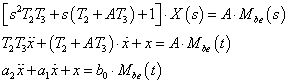
Bevezetjük a „mesterséges” állapotjelzőket, feltételezve, hogy a deriváltak léteznek:
|
|

Megjegyezzük, hogy a „valóságban” x1=MK, és x2=dMK/dt, és ez utóbbi nem mérhető fizikai mennyiség. Ezért a jelző: „mesterséges”. Ez a függvény célszerűen numerikus úton (az esetleges hibákat tudomásul véve) közelíthető. Ugyanakkor arra is felhívtuk korábban a figyelmet, hogy az állapottér modell „normál” alakjának felhasználásával, sokkal egyszerűbb az állapotszabályozás stabilitásának beállítása, számítása.
|
|
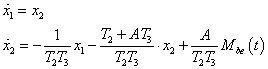
Általános formában a nevezőben „an”, a számlálóban „bm” együtthatókat alkalmazunk:
|
|
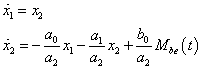
A második átviteli függvényből az állapottér modell kimeneti egyenlete lesz, a keresett mennyiséget egy kimenet (x2) formájában kapjuk:
|
|
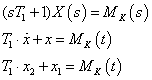
Mátrixos alakban felírva:
|
|
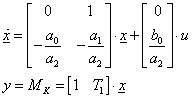
A főegyenletnek fent látható formáját nevezi a szakirodalom „normál” alaknak, és mint jeleztük, alkalmazása az állapotszabályozások esetében célszerű.
Az állapottér modell főegyenletének homogén megoldását a későbbiekben bemutatjuk két változatban, a fenti példához hasonló feladaton. A megoldáshoz azért választunk újabb feladatot, hogy a modellezés gyakorlására is lehetőség legyen.
A feladat megoldása a passzív rész meghatározása miatt impedancia módszerrel is igen tanulságos.
4.4. Impedancia módszer MK meghatározására
A következő ábrán a feladat impedancia hálózatát látjuk. Első lépésben ki kell jelölnünk a keresett változót, jelen esetben ez az összehasonlítás kedvéért ugyancsak az MK torziós nyomaték lesz. Az impedancia hálózatot a keresett változónak alárendelve választjuk passzív és aktív részre. Vigyázni kell, mert a passzív rész nem csupán a tengely rugómerevségéből számított impedancia, hanem mindazon elemek, amelyek a szétválasztás után keletkezett kapcsok felől nézve „látszik”. Így tehát a rugómerevség impedanciájával sorosan kapcsolva figyelembe kell venni egy további eredő impedanciát is. Ez a tárcsa tehetetlenségi nyomatéka és a vele párhuzamosan kapcsolt csillapítás (csapágysúrlódás modellezése) impedanciáinak eredője.
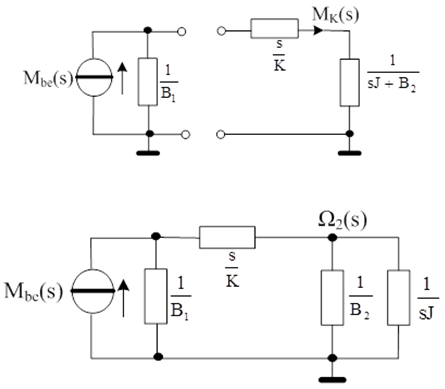
Az aktív rész egyszerű Norton alak.
A terhelő impedancia ismeretében, az átmenő változó osztó („áramosztó”) segítségével közvetlenül felírható a keresett MK(s)/Mbe(s) átviteli függvény.
|
| ||
|
|
Az irányítástechnikában szokásos átalakítás után természetesen ugyanazt az átviteli függvényt kaptuk, amelyet a mátrix-vektor egyenletek kifejtésével:
|
|

4.5. Forrás egyenérték számítása
Ha az átmenő változó forrással gerjesztett forgó mechanikai rendszert annyiban módosítjuk, hogy az Ω2(s)/Mbe(s) átviteli függvényt keressük, akkor be tudjuk mutatni a forrás egyenérték számítást is.
Majd ezt követően, az eredeti forgó mechanikai rendszerbe beépítünk egy csúszó tengelykapcsolót, és az így átalakított rendszeren bemutatjuk az aktív rész új forrás értékének meghatározását, ami figyelemre méltó lépéseket tartalmaz.
Ha Ω2 keresztváltozó keresett Mbe átmenő változó forrás hatására, akkor az osztó szabályok közvetlenül nem alkalmazhatóak. Ebben az esetben keresztváltozó osztó felírása lenne a legegyszerűbb forma. Ehhez át kell alakítanunk az aktív részt. Azt kell megvizsgálni, hogy mi az adott aktív rész Thevenin ekvivalense. A passzív rész a tárcsa és a csapágy impedanciájának párhuzamos kapcsolása.
A következő ábrán, bal oldalon látható az aktív rész, amelynek egyenértékű kapcsolását keressük. Az új, keresztváltozó forrás értéke az aktív rész terheletlen kapcsain (üresjárat) megjelenő keresztváltozó érték. Ebben az esetben az s/K impedancia nem játszik szerepet, mert terheletlenül nincsen elcsavarodás, így nincs torziós nyomaték, és nincs a két tengelyvég között szögsebesség különbség sem. Analógiaként képzeljünk el egy áramforrást, amellyel párhuzamosan egy ellenállás van kacsolva, és ehhez egy olyan induktivitás csatlakozik, amelynek egyik vége szabad. Áram nem folyik, így feszültségesés sem jöhet létre.
Az ekvivalens forrás értéke Ohm törvényével adódik:
|
|
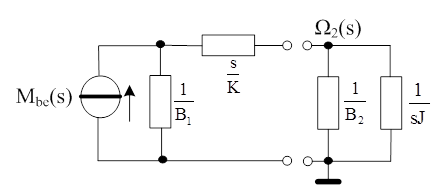
Az ekvivalens, új keresztváltozó forrás belső ellenállását kell következő lépésben meghatároznunk. Ezt a belső ellenállást az aktív rész kapcsai felől „benézve” kell kiszámítani. Tekintettel arra, hogy az átmenő változó forrás saját belső ellenállása elméletben végtelen nagy, szakadással helyettesítjük. Az ekvivalens forrás belső impedanciája ennél fogva a két impedancia soros eredője:
|
|
A keresett átviteli függvény keresztváltozó osztó segítségével most már megadható:
|
| ||
|
|
Az átviteli függvény azt mutatja, hogy stacionárius állapotban, tehát bekapcsolással járó tranziens folyamat lezajlása után a szögsebességet a két csapágy fogja „beállítani”.
Annak bemutatására, hogy az aktív rész új forrása azonos típusú források esetében is igényelhet egy-két számítási lépést, átalakítottuk a vizsgált rendszert. A tengelyt baloldalon meghosszabbítottuk, és az ismeretek egyidejű bővítése céljából beiktattunk egy elhanyagolható tehetetlenségi nyomatékkal (csak a példában, és nem a valóságban) rendelkező, szabályozható csúszással rendelkező tengelykapcsolót. Ez a különleges tengelykapcsoló csökkenteni képes a motor által okozott torziós lengéseket a hajtóművön, de a forgatónyomatékot maradéktalanul átviszi, hiszen látjuk, hogy a gráfban nincsen elágazás. Ilyen típusú hidrodinamikus tengelykapcsoló például a „Föttinger Kupplung”, amely szabályozható csúszást képes biztosítani. Ilyen jellegű tengelykapcsolókról a Braess és Seiffert [4.1.] gépjárművek konstrukciós kérdéseivel foglalkozó művében olvashatunk bővebben.
A szabályozható csúszást a „B” csillapítási tényezővel modellezzük.
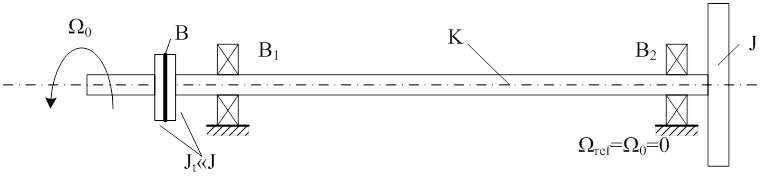
A következő ábra az impedancia hálózatot mutatja. A passzív rész a keresett keresztváltozóhoz tartozó két párhuzamos impedancia eredője (tárcsa és B2-es jelű csapágy).
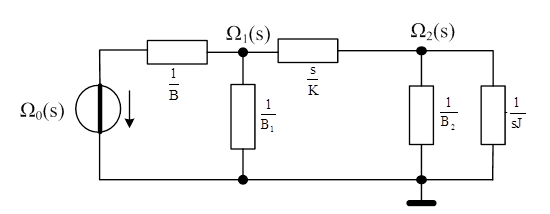
Az átviteli függvény keresztváltozó osztóval adható meg, persze, ehhez ki kell számítani Zb és ΩF(s) értékét. A keresett átviteli függvény:
|
|
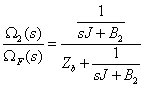
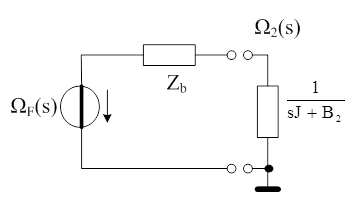
Az aktív rész új ΩF(s) forrása természetesen nem egyezik meg az eredeti kapcsolás Ω0(s) forrásával. Terheletlen állapotban a tengely nem tud megcsavarodni, szögsebesség különbség nem jön létre a két vége között, így nem vesszük figyelembe a számításnál. Az új keresztváltozó forrás ezért egy keresztváltozó osztóval adható meg:
|
|
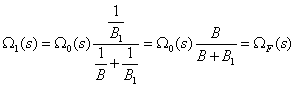
Az új aktív rész belső ellenállását a szabad kapcsok „felől” a hálózatba „tekintve” számítjuk ki, miközben tudjuk, hogy Ω0(s) saját belső ellenállása zérushoz tart, ezért rövidzárként helyettesíthető:
|
|
Behelyettesítve a keresztváltozó osztó képletébe, az alábbi formát kapjuk:
|
|
Végül a szabályozástechnikai átviteli függvényformára törekedve alakítjuk át a törtet:
|
|

|
|

Könnyen leolvasható az átviteli függvényből az a műszaki szempontból természetes állapot, hogy amennyiben elhanyagolható mértékű a tengelykapcsoló csúszása, akkor állandósult állapotban a tengely végén lévő tárcsa szögsebessége megegyezik a forrás (bemenet) szögsebességével.
4.6. Szuperpozíció elvének alkalmazása több forrás esetén
Már említettük, hogy az impedanciákkal való számolás közepesen bonyolult rendszerekig meggyorsíthatja az eredményhez jutást. Az eddigiekben több esetet megvizsgáltunk, egyedül a szuperpozíció szabályának alkalmazása hiányzik.
A bemutatás érdekében az eredeti faladatot annyiban módosítottuk, hogy a tárcsához fékező nyomatékot rendeltünk hozzá, „-Mt” formában. A negatív előjel arra utal, hogy nem hajtó, hanem fékező nyomatékról van szó. A következő ábrákon látjuk a modellt, és az impedancia hálózatot.
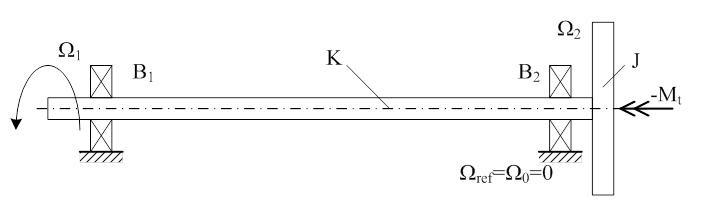
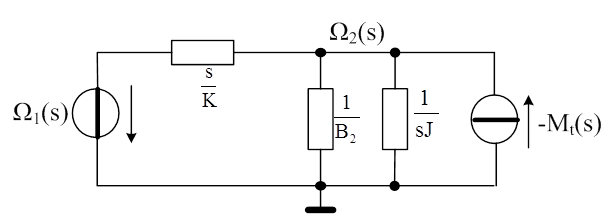
A passzív rész továbbra is a tárcsa tehetetlenségi nyomatéka és a csapágysúrlódás alapján adódó, párhuzamos impedanciák eredője, ezeken, együttesen lép fel a keresett, keresztváltozó kimenet. Természetes, hogy egyrészt a baloldali keresztváltozó forrás értékével, másrészt a fékezőnyomatékkal állítható be a keresett tárcsa-szögsebesség.
A szuperpozíció elve szerint minden forrás hatását külön-külön vizsgáljuk a kérdéses impedancián (eredőn), majd a hatásokat előjel-helyesen összegezzük. Eközben a nem „aktív” forrásra úgy tekintünk, mintha annak saját belső ellenállását „látnánk”. Az Ω1(s) forrás felől nézve a –Mt(s) nyomatékforrás szakadásnak „látszik”, míg a fékező nyomatékforrás felől vizsgálva az Ω1(s) forrás rövidzárként viselkedik.
A hálózatot ennek megfelelően kell „átrajzolni”. Az átviteli függvény felírásához az egyik esetben keresztváltozó osztóra lesz szükség, míg a másik forrás felől „nézve” elegendő egy eredő impedancia számítás és egy Ohm-törvény alkalmazása.

A szuperpozíció elve két forrás esetén a matematika nyelvén megfogalmazva:
|
| ||
|
|

A nyomatékforrás felől nézve a következő eredő impedancia látható:
|
|
Végül a keresett változó az Ohm törvény alkalmazásával:
|
|

Teljesen nyilvánvaló, hogy a két átviteli függvény nevezője nem térhet el egymástól, hiszen ez az adott rendszer dinamikáját meghatározó karakterisztikus polinom. A számláló már más eset, ott az adott gerjesztés (bemenet) hatása figyelhető meg. Ha például adott kezdeti szögsebességgel forog a tárcsa, nincsen Ω1 bemeneti szögsebesség, és a rendszer túlcsillapított, akkor a tárcsa szögsebessége állandó fékezőnyomaték rákapcsolása esetén –lengés nélkül - exponenciális függvényt követve csökken zérusra.
|
|
Összefoglalva az előbbieket látjuk, hogy több forrás esetében, a keresett kimenetre, minden forrás hatását külön-külön kell egy-egy átviteli függvénnyel leírni:
|
|

Az analízis módszereinek bemutatása után sor kerülhet majd a mechatronikában leggyakrabban előforduló szabályozott szakaszok, illetve szabályozóköri komponensek matematikai modelljeinek bemutatására.
Szakirodalom
[4.1.] Handbuch Kraftfahrzeugtechnik. Vieweg+Teubner Verlag. Wiesbaden . 2011.
5. fejezet - Az állapotegyenlet megoldása idő és operátor tartományban
A matematikai modellek felírását követően, a teljesség kedvéért bemutatjuk az állapotegyenlet megoldását idő- és operátor tartományban. E jegyzet terjedelme nem teszi lehetővé, hogy minden egyes mintapéldán elvégezzük ezeket a befejező lépéseket, de a kiválasztott, egyenes vonalú mozgást végző, másodrendű mechanikai rendszer alkalmas az állapotegyenletek megoldásának bemutatására.
A feladat egyszerű, és gyakori a gépészetben, hiszen a passzív rezgéscsillapító legegyszerűbb változatát modellezi. Azt, hogy a rezgéscsillapítás problémakörének egyetlen kis szelete mit jelent a valóságban, egy későbbi fejezetben módunk lesz részletesen megismerni.
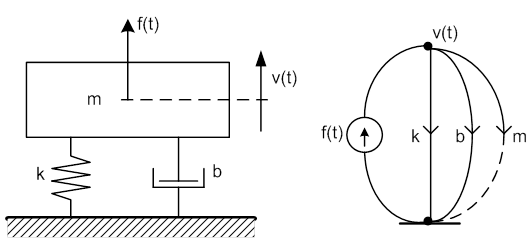
Az „m” tömeget egy „Kelvin-modell”, azaz egy valós, veszteséges rugó támasztja alá. Kétféle gerjesztés modellezi a valóságos folyamatokat: Erőgerjesztés, és a talaj (födém) sebesség gerjesztése. A példában a talaj sebességét egyenlővé tettük a referenciával, feltételezve annak teljes nyugalmi állapotát. A gráf mutatja, hogy a modell által „sugallt”, soros rendszer helyett egy párhuzamossal van dolgunk, hiszen a tömeg csak a referenciára vonatkoztatható.
A gráf alapján felírt csomóponti egyenlet alkalmas az állapottér modell megalkotására.
|
|
A két energiatároló meghatározza az állapotjelzőket, amelyek ebben az esetben „kanonikus” állapotjelzők [3.1.]:
|
|

A főegyenlet az állapotjelzők alkalmazásával az alábbi formát ölti:
|
|
Az alábbiakban az állapotegyenlet megoldására, az állapotváltozók időbeli lefolyásának meghatározására két utat mutatunk be. Az egyik út az időtartományban szemlélteti a lépéseket, a másik az operátor tartományban, ahonnan inverz Laplace transzformáció révén jutunk újra az időtartományba.
A műszaki gyakorlatban ezt a feladatot – lineáris esetben – a másodikként említett „kerülő úton”, az operátor tartományt igénybe véve szokás megoldani. A teljesség kedvéért azonban bemutatjuk az időtartománybeli megoldás folyamatát is, világossá téve, hogy még egy egyszerűnek mondható feladat esetében is milyen vesződségesen járható az „egyenes” út.
A feladatban annyi egyszerűsítést hajtunk végre, hogy a csillapítást kiiktatjuk a rendszerből. ha ezt nem tennénk, a megoldást rendkívül megnehezítené a periodikus és aperiodikus sorozat elemek szétválasztása.
5.1. Megoldás idő tartományban sorfejtéssel
Első lépésben emlékeztetünk arra, hogy egy változó esetében miként kapjuk időtartományban a megoldást.
Kiindulás az egyváltozós elsőrendű, lineáris, homogén differenciálegyenlet:
|
|
Az x(t) megoldáshoz integrálni kell mindkét oldalt, majd az „lnx” függvényt x-re kifejezni:
|
|
A fenti megoldás műszaki értelmezésében az integrálásból származó „C” konstans az x(t) függvény kezdeti értékének meghatározására szolgálhat.
Kihangsúlyozzuk, hogy az időfüggvények helyes megadásához nélkülözhetetlenek a jobboldali kezdeti értékek. Ha ezek nem állnak rendelkezésre, mert csak a baloldali, un. kiindulási értékek ismertek, akkor a kezdeti értékeket bizonyos gerjesztés típusok esetén ki kell számítani. A műszaki gyakorlatban általánosan elfogadható, hogy a kiindulási és a kezdeti értékek megegyeznek, hiszen a valóságban t(0-) és t(0+) „időtartam” alatt nem tudunk egy valós rendszer állapotjelzőinek feltöltöttségén változtatni. Más kérdés, hogy elméletben a Dirac-impulzus révén létrejövő x(0+) érték kiszámítható. A kérdéssel, Fodor György [3.1.]útmutatása alapján, részletesen foglalkozunk a 6.3. szakasz fejezetben.
Az egyváltozós differenciálegyenletre kapott megoldás analógiájaként az állapotegyenlet homogén megoldása a következő formájú lesz:
|
|
A fenti exponenciális függvény ebben az alakjában a „reménytelen esetek” kategóriájába tartozik. Az exponenciális mátrix helyett, a „használható” formában való alkalmazást a Taylor sorfejtés teszi lehetővé. Ennek segítségével az exponenciális mátrixot végtelen hatványsorrá lehet átalakítani.
|
|

Ugyanakkor sajnálatos dolog, de hatványsorból csak kellően nagy gyakorlattal lehetséges a megfelelő harmonikus és aperiodikus összetevők szétválasztása. Ezért jeleztük már korábban, hogy a modellben a csillapítási tényezőt nullának választjuk, és így kapott sor csak periodikus függvényhez tartozó elemeket fog tartalmazni. A befektetendő munka mennyisége könnyen elképzelhető, ha a feladatunkban megadott 2x2-es mátrixnál nagyobbakat kell hatványozni.
Ezen a helyen érdemes megjegyeznünk, hogy az állapotszabályozások esetében döntően fontos irányíthatósági feltétel hipermátrixában ugyancsak az alapmátrix hatványai jelennek meg, ennek oka a Taylor sorban rejlik. Ez természetes, hiszen az irányíthatóság esetében azt vizsgáljuk, hogy a bemenetek segítségével (a hatványsor szorzója „ ”) lehetséges-e az állapotjelzőket megadott kezdeti értékről tetszőleges értékre vezérelni, miközben figyelembe vesszük a rendszer dinamikai tulajdonságait is. A dinamikai tulajdonságok pedig éppen az „
”) lehetséges-e az állapotjelzőket megadott kezdeti értékről tetszőleges értékre vezérelni, miközben figyelembe vesszük a rendszer dinamikai tulajdonságait is. A dinamikai tulajdonságok pedig éppen az „ ” rendszermátrixba vannak „bekódolva”.
” rendszermátrixba vannak „bekódolva”.
|
|

Az eredeti feladat rendszermátrixában zérussá tesszük a „b” csillapítási tényezőt, és ezzel átalakul a mátrix is, amint azt a jobboldali mátrixnál látjuk:
|
|
A sorozat felírásához szükséges mátrix hatványozást az alábbiakban mutatjuk be:
|
|
valamint
|
|
illetve
|
|
és
|
|
A kiszámított együtthatókkal már felírható a négy hatványsor első néhány tagja, amiből azonban már következtetni lehet a sor által helyettesített függvényre.
|
|
A mátrix Φ12 elemének sorozatából kiemelhető , a Φ21 elemének sorozatából pedig
, a Φ21 elemének sorozatából pedig  .
.
Tekintettel arra, hogy az átalakítás nem egyszerű, néhány fontos lépését bemutatjuk. Ismeretes, hogy a csillapítatlan rendszer rezonancia körfrekvenciája a következő módon definiált:  .
.
A Φ12 elemet alkotó sorozatot úgy kell átalakítani, hogy a sorozat minden tagjában megjelenjék az „α” érték a „t” változónak megfelelő hatványon. Ha a hatványsort beszorozzuk α-val, és kiemeljük a  szorzatot, akkor a Φ12 elemet alkotó sorozat az alábbi formájú lesz:
szorzatot, akkor a Φ12 elemet alkotó sorozat az alábbi formájú lesz:
|
|

Hasonlóképpen járunk el a Φ21 elemben található sorozattal is, de itt a kiemelés  formát ölt:
formát ölt:
|
|
A kiemelés után felismerhető, hogy a mellékátló mindkét sorozata sinus, míg a főátló sorozatai cosinus függvény tagjait alkotják. Ezzel megkaptuk az alapmátrixot, vagy rezolvens mátrixot idő tartományban:
|
|
Az időtartománybeli megoldást az alapmátrix segítségével és a kezdeti értékek ismeretében kapjuk. Ez a megoldás a differenciálegyenlet- rendszer homogén megoldásait tartalmazza:
|
|

Egyszerűség kedvéért kezdődjön a vizsgálat  időpillanatban (azaz zérus kiindulási értékekkel), és így az alábbi formát kapjuk:
időpillanatban (azaz zérus kiindulási értékekkel), és így az alábbi formát kapjuk:
|
|
A kijelölt mátrix-vektor műveleteket kifejtve látható lesz az állapotjelzők időbeli viselkedése, ha a vizsgálatot a jobboldali kezdeti értékekről indítjuk:
|
|

és
|
|

Az eredményt a szokásos módon dimenzió ellenőrzésnek vetjük alá, és megállapíthatjuk, hogy az eredmény helyes.
5.2. Megoldás operátor tartományban a kezdeti érték probléma figyelembe vételével
Nézzük ezek után, hogyan kell eljárni, ha az állapotjelzők időfüggvényét a Laplace transzformáció alkalmazásával határozzuk meg.
Az állapottér modell főegyenletének homogén részét Laplace transzformáljuk, és megfelelő átrendezés után kapjuk a megoldást. A deriválás Laplace transzformációs tétele tartalmazza az  kiindulási értéket. A későbbiekben látjuk majd, hogy éppen ez a tétel teszi lehetővé a kezdeti értékek „automatikus” meghatározását a transzformáció alkalmazása révén [3.1.].
kiindulási értéket. A későbbiekben látjuk majd, hogy éppen ez a tétel teszi lehetővé a kezdeti értékek „automatikus” meghatározását a transzformáció alkalmazása révén [3.1.].
|
|
Ügyelni kell a mátrix-vektor műveletek sorrendjére, mert a sorrend nem felcserélhető.
|
|
A szakirodalomban az  inverz mátrixot gyakran „alapmátrixnak” nevezik, és
inverz mátrixot gyakran „alapmátrixnak” nevezik, és  -vel jelölik. Szerepe a dinamikai tulajdonságok leírásában igen jelentős, mert a nevezője a gyököket (pólusokat) meghatározó karakterisztikus polinom. Amikor az állapottér modell (ÁTM) rendszermátrixát vizsgáltuk, megjegyeztük, hogy a stabilitás egyik feltétele a főátló elemeinek negatív előjele. Íme, a magyarázat az állításra, ami az
-vel jelölik. Szerepe a dinamikai tulajdonságok leírásában igen jelentős, mert a nevezője a gyököket (pólusokat) meghatározó karakterisztikus polinom. Amikor az állapottér modell (ÁTM) rendszermátrixát vizsgáltuk, megjegyeztük, hogy a stabilitás egyik feltétele a főátló elemeinek negatív előjele. Íme, a magyarázat az állításra, ami az  kifejezésben rejlik. A rendszermátrix negatív előjelet kap, és így, az operátorral megszorzott egységmátrixból kivont, negatív előjelű főátló elemek mind pozitív előjelűek lesznek (lásd lejjebb, a példán). A Hurwitz stabilitási kritérium alapján ismert, hogy karakterisztikus polinom stabil esetben nem tartalmazhat nullánál kisebb együtthatót.
kifejezésben rejlik. A rendszermátrix negatív előjelet kap, és így, az operátorral megszorzott egységmátrixból kivont, negatív előjelű főátló elemek mind pozitív előjelűek lesznek (lásd lejjebb, a példán). A Hurwitz stabilitási kritérium alapján ismert, hogy karakterisztikus polinom stabil esetben nem tartalmazhat nullánál kisebb együtthatót.
A feladat már ismert rendszermátrixával elvégezzük az első kijelölt műveletet:
|
|
A következő lépésben invertáljuk a kapott mátrixot! Ehhez meg kell határozni az adjungáltját és a determinánsát:
|
|
|
|
Ezekkel az inverz mátrix, és tulajdonképpen az állapotjelzők operátortérbeli függvényei is adottak. A keresett időtartománybeli alakhoz már csupán végre kell hajtani az inverz Laplace transzformációt.
|
|
tehát
|
|
Inverz Laplace transzformálás után a következő időfüggvényt kapjuk:
|
|
Látható, hogy a „kerülő út” használata ugyanazt az eredményt hozta, de lényegesen egyszerűbben. Ismételten le kell szögezni, hogy csillapított rendszer esetében – tehát, ha „b” nem zérus - az időtartományban az jelentene nagy gondot, hogy két sorozat szorzatának tagjaiból kellene szétválogatni, visszaállítani a harmonikus és az aperiodikus sor tagjait.
A másik állapotjelzővel is hasonlóan járunk el:
|
|
Végül a visszatranszformálás után ugyanazt a függvényt kapjuk, mint a sorfejtéssel:
|
|

A magyarázatot a kezdeti érték és a kiindulási érték közötti különbségre Fodor György többször idézett művében [3.1.]találjuk.
Láttuk, hogy a Laplace transzformáció alkalmazásával lényegesen egyszerűbben jutunk eredményhez. Fodor György a Laplace transzformáció további előnyeként mutatja be, hogy a transzformáció mintegy „automatikusan” előállítja az időtartománybeli megoldáshoz szükséges t(0+) kezdeti feltételeket is, elegendő a kiindulási értékeket ismerni.
6. fejezet - Szenzorok és aktuátorok dinamikai modelljei és tervezésük
- 6.1. Piezoelektromos gyorsulásérzékelő. Fordító váltó a gyakorlatban.
- 6.2. Pneumatikus és hidraulikus munkahenger. Fordító váltók a gyakorlatban
- 6.3. Egyenáramú szervomotor és tachogenerátor modelljei. Váltók a gyakorlatban
- 6.4. Merülő tekercses lineáris motor konstrukciója. Váltó a gyakorlatban.
- Szakirodalom
A szenzorokat és az aktuátorokat nem véletlenül szokás együtt tárgyalni. Ennek sok egyéb mellett, két oka van. Az egyik az, hogy néhány un. aktív szenzor inverz üzemmódban aktuátorként viselkedik. Erről a témáról egy áttekintést láthatunk a fejezet első ábráján. A másik az, hogy a két csoport a mechatronika „klasszikus” definícióját gyakran önmagában is megjeleníteni képes. Az aktuátorok és a szenzorok képezik a „határfelületet” a gépészet és az elektrotechnika/elektronika között, hiszen a szenzor feladata a mérendő fizikai (mechanikai) mennyiségekből villamos úton mérhető mennyiséget létrehozni, míg az aktuátor villamos bemenő jel (teljesítmény) segítségével hatni képes a mechanikai rendszerben zajló folyamatokra. Ezek a rendszer építőelemek tehát a legtöbb esetben elektromechanikus rendszerek, és ráadásul az intelligens szenzorok és aktuátorok esetében az elektronika is integrálva van hozzájuk (Embedded Systems: beágyazott rendszerek). A teljesség kedvéért azonban tudni kell, hogy nem minden szenzor és aktuátor feltétlenül elektromechanikus rendszer. Vannak különleges eszközök, amelyek egymagukban szenzorok és aktuátorok. Sok esetben ez nem valamiféle bonyolult rendszer, hanem egyszerűen egy speciális anyag. Példaként megemlítjük, hogy vannak olyan speciális anyagok, amelyek alakjukat a folyadékban található alkohol egy bizonyos küszöbértékének meghaladása után ugrásszerűen változtatják, térfogatuk megnő. Segítségükkel például elzáró, vagy adagoló szelepeket építenek. Más jellegű példa, és lomha viselkedése miatt korlátozottan alkalmazható, de egy időben például számos publikáció látott napvilágot az SMA (alakemlékező fémötvözet) mechatronikában való alkalmazhatóságáról. Ezek az anyagok hőmérsékletváltozás hatására nagymértékben és ugrásszerűen változtatják alakjukat. Ezeket az anyagokat a különleges szenzorok és aktuátorok csoportban tárgyalja a szakirodalom.
Még a mérés-és műszertechnikában járatos szakemberek számára is gyakran nehézséget okoz a mérőátalakító és a szenzor fogalmának megkülönböztetése. A kérdés tisztázása különösen akkor lett aktuális, amikor a mechatronika eszköztárának fejlődésével, elsősorban konferencia szekciók elnevezésében kialakult és megerősödött a „szenzortechnika” területe. A mechatronikai mérnök a rendszerek szintézise során túlnyomó részben kész termékeket, valójában mérőátalakítókat használ, amelyek „lelke”, legfontosabb alkotórésze a „szenzor” (érzékelő). Miben áll tehát a különbség? Van-e minden esetben különbség a két fogalom között? Ezt kíséreljük meg néhány sorban tisztázni.
A gépészeti méréstechnikában és a mechatronikában a szenzor feladata az alakváltozásnak, az elmozdulásnak, a fényintenzitás változásnak, a mágneses tér és a mágneses jellemzők változásának, anyagjellemzők változásának stb. átalakítása olyan fizikai mennyiséggé, amelyet villamos úton mérni lehet. A villamos átalakítás nem kizárólagos, hiszen napjainkra jellemző a fény, mint információhordozó erőteljes elterjedése, és vannak mérőrendszerek, amelyek levegőnyomással működnek. Vannak aktív szenzorok, amelyek működésükhöz nem igényelnek segédenergiát (ez a kisebbség) és igen sokféle passzív, tehát segédenergiával működő szenzort ismerünk. A szenzorok tárháza a technika fejlődésével folyamatosan bővül.
Egy adott szenzor típust sokféle mérőátalakítóba lehet beépíteni, ettől a szenzor még eredeti funkciója alapján nem válik többféle fizikai mennyiség mérésére közvetlenül alkalmassá. A szenzorok többsége ugyanis csak közvetett mérést tesz lehetővé. A közvetett mérést a nemzetközi méréstechnikai irodalomban is ismert „mérőlánc” testesíti meg. Igen gyakran fizikai mennyiségek közötti átalakítások sora szükséges ahhoz, hogy a mérőlánc végén a bemenő mennyiséggel szoros kapcsolatot mutató villamos jelhez jussunk.
Példaképpen emeljünk ki egy passzív szenzort a sorból, ez a nyúlásmérő bélyeg. Napjainkban kétféle változata létezik, fémréteg és félvezető. Mit „mér” tulajdonképpen a nyúlásmérő bélyeg? Nevében is mutatja, hogy alakváltozást, nyúlást és zsugorodást! Minden olyan fizikai mennyiség mérésére alkalmas tehát, amelyek egy megfelelően méretezett gépészeti elemen reprodukálható módon, és a tervezett mérési tartományban alakváltozást képesek létrehozni. Ezért nyúlásmérő bélyeg, mint szenzor található – többek között – a következő mérőátalakítókban: elmozdulás érzékelő, erőérzékelő, gyorsulásérzékelő, nyomásérzékelő, nyomatékmérő, hogy a mechatronikában legismertebbeket említsük.
Ugyanakkor tudni kell, hogy a fent felsorolt fizikai mennyiségek többsége egy megfelelően kialakított mechanikai elem segítségével elmozdulássá is alakíthatóak, így mindegyikük mérhető induktív elmozdulás szenzorok felhasználásával is.
A példából világosan látszik, hogy a szenzor és a mérőátalakító nem azonos műszaki fogalmak, tehát a szenzor a mérőátalakító „szíve”. Ezért helytelen pl. erőmérő szenzorról beszélni, hiszen az erő többféle szenzorral, pl. elmozdulás, alakváltozás, optikai stb. szenzorokkal egyaránt mérhető. Az ugyanakkor lehetséges, hogy a különféle szenzorokkal megvalósított mérőeszközök működési frekvenciatartománya, és mérési tartománya erősen különböző. Néhány jellegzetes, és a mechatronikában fontos fizikai mennyiség érzékelésére alkalmas szenzor összefoglalása látható az alábbi táblázatban. A mátrixban látható jelek magyarázata alul található.
|
|
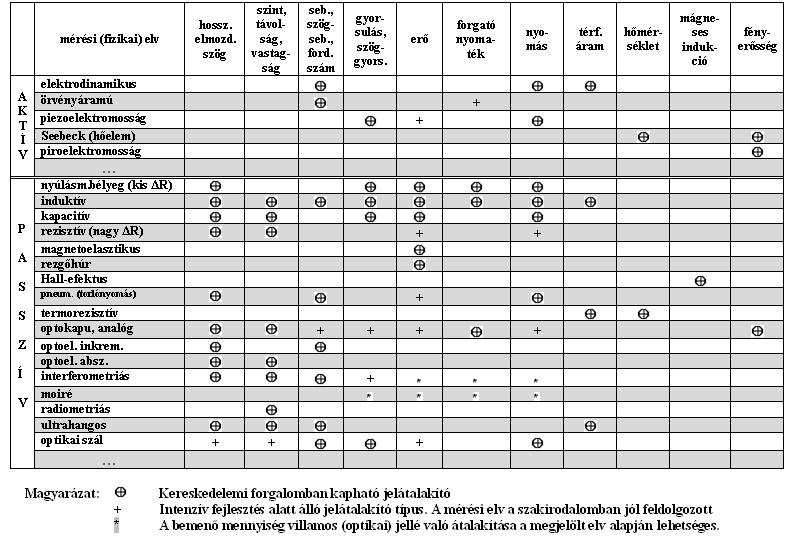
A helyszűke miatt nem lehet feltüntetni azt, hogy melyik szenzor, milyen „köztes elem” segítségével teszi lehetővé az átalakítást, a tisztelt olvasóra bízzuk, hogy felismeri-e, hogy adott esetben alakváltozást, elmozdulást, fényintenzitás, esetleg anyagjellemző változást alakít át a szenzor villamos úton mérhető mennyiséggé.
6.1. Piezoelektromos gyorsulásérzékelő. Fordító váltó a gyakorlatban.
A piezoelektromos átalakítók fordító váltó jellegű energia átalakítók . A fordító váltó két eltérő típusú fizikai rendszer eltérő típusú változói között teremt kapcsolatot (ld.: 2. fejezet).
A piezoelektromos effektus energia átalakítók formájában előkelő helyet foglal el a mechatronikai rendszerek szintézise, tervezése folyamatában. A piezoelektromos átalakító tökéletesen megvalósítja az energia átalakítás mindkét irányát, hiszen mechanikai bemenetre villamos kimenettel, illetve villamos bemenetre mechanikai kimenettel válaszol. Az első irány általában a szenzorokra jellemző, míg a második az aktuátorokra. Ezek megvalósítási formái igen változatosak.
Piezoelektromos szenzor olyan aktív, tehát működéséhez segédenergiát nem igénylő eszköz, amely alakváltozást alakít át villamos töltéskülönbséggé. Alkalmas tehát minden olyan fizikai, mechatronikai mennyiség mérésére, amely reprodukálható alakváltozást idéz elő a piezoelektromos átalakítón. Ilyenek például az erő, a nyomás, és a gyorsulás. Fontos tudni, hogy ez az eszköz statikus mérésekre napjainkig még nem alkalmas, mert az alakváltozás (kristály deformáció) hatására létrejövő töltések idővel elszivárognak, részben a kerámián, részben pedig a töltéserősítőn keresztül. Megfelelő tokozásban közvetlenül lehet vele erőt mérni, és ha szeizmikus tömeget helyeznek rá, majd házba foglalják, akkor a ház gyorsulása detektálhatóvá válik. Ez a régóta ismert piezoelektromos gyorsulásérzékelő elve. A szeizmikus tömeg fa(t)=ma gyorsulással arányos tömegerőt hoz létre, amely erő a kerámiát deformáló rugóerővel fpie(t)=kΔx tart egyensúlyt. A Δx elmozdulás különbség a ház és a szeizmikus tömeg közötti relatív elmozdulás, vagyis alakváltozás. Amint a modell bemutatásánál látni fogjuk, az alakváltozáshoz szükséges erőt a gyorsulás, mint bemenet hozza létre. A hatására kialakuló piezo-feszültség, a kimenő mennyisé. Ezt a gyorsulásérzékelőt a későbbiekben részletesen elemezzük. A piezokerámia, mechanikai szilárdsága miatt, nélkülözhetetlen az extrém nagy nyomások mérése során, pl. belsőégésű motorok hengereiben. Az átalakító anyaga régebben a természetes kristályok (kvarc, turmalin, Rochell só) köréből került ki, napjainkban azonban az báriumtitanát, ólomtitanát és ólomcirkonát kerámiákat a nagyobb érzékenységük miatt alkalmazzák. Ezeket porkohászati úton állítják elő, majd megfelelő elektromos térerő segítségével állítják be a piezoelektromos dipólusokat a kívánt irányba. A piezokerámia „nF” átalakítási tényezőjét négy paraméter alkotja. Az indexben lévő „F” a fordító váltó jellegű tulajdonságra utal.
|
|
Az összefüggésben „Kp[C/N], vagy [m/V]” a piezoelektromos együttható, „l” a kerámia vastagsága, „A” a felülete, εr a kerámia relatív permittivitása. Néhány irodalomban a piezoelektromos anyagra jellemző tényezőket „ep” együtthatóként foglalják össze. A fordító váltó itt látható képletét a későbbiekben a fizikai egyenletekből fogjuk levezetni. Az energia átalakítás iránya megfordítható. Ezt a második jelenséget aknázzák ki, ha a piezokerámia segítségével aktuátorokat akarnak létrehozni. Ezek közül a legismertebb a piezomotor, amely kereskedelemben kapható eszköz, lineáris és forgó mozgások létrehozására a nanométeres tartománytól a néhány mikrométeresig. Mobiltelefonjainkban, elektroakusztikai átalakítóként, a rezgő piezo tárcsa hangszóró szerepét játssza el, azzal együtt, hogy frekvencia átvitele korlátozott, de a beszédhang átvitelére alkalmas. Az autóipar ma már elképzelhetetlen villamosan vezérelt piezoelektromos adagoló nélkül (mechanikai alakváltozás).
Nem szabad ugyanakkor arról sem elfeledkezni, hogy a kerámia felületein egy fémréteg segítségével gyűjtik össze a keletkezett töltéseket, és ehhez csatlakozik a villamos vezeték is. A kerámia, mint villamosan szigetelő anyag a fémrétegek között egy Cp kapacitású piezo-kondenzátort képez, ezt a modellezésnél figyelembe kell venni. Később látni fogjuk az egyenletekből, hogy ennek a kapacitásnak a növelése mechanikai oldalon a rendszer rugómerevségének növekedését eredményezi, hiszen fordító váltóról van szó, és ebben az esetben a „két oldal” energiatárolói típus szerint ellentétükre „váltanak” át.
Foglaljuk össze egyenletek formájában a piezoelektromos energia átalakítót.
Az energia átalakításra jellemző fizikai összefüggések a szakirodalomban megtalálhatóak, itt csak egyet említünk, pl. A. Lenk: Elektromechanische Systeme Bd. 2. [6.1.]:
|
|
A két egyenletben az alábbi jelöléseket alkalmaztuk:
|
P[C/m2] |
elektromos polarizáció | |
|
Kp[C/N], [m/V] |
piezoelektromos együtth. (kvarc: 2.3·10-12 C/N; báriumtitanát: 2.5·10-12 C/N) | |
|
σ[N/m2] |
mechanikai feszültség | |
|
ε0[C/Vm] |
vákuum dielektromos állandója | |
|
εr |
relatív dielektromos együttható | |
|
Ed[V/m] |
dielektromos térerő | |
|
E[N/m2] |
Young-modulus |
A második egyenlet dimenzió nélküli, ezért van szükség az „Kp” piezoelektromos együttható kétféle dimenziójára, és az ezek közötti azonosság bemutatására.
Ha az átalakító két egyenletét úgy vizsgáljuk, hogy keressük a mechanikai és a villamos oldalak közötti összefüggéseket, akkor a két egyenlet egyszerűbb alakba írható:
|
|

Tehát a kerámia (piezoelektromos anyag, legtöbbször kerámia) kontaktust adó fémréteg fegyverzetein létrejövő „P” töltéspolarizáció a piezoelektromos együtthatóval és a kerámián létrehozott „σ” mechanikai feszültséggel függ össze. A kerámia mechanikai alakváltozása viszont a piezoelektromos együttható révén az elektromos térerővel függ össze.
Adott minden az átalakító szokásos módon, átmenő és keresztváltozókkal való leírásához. A keresett alakhoz átalakítások és helyettesítések révén jutunk el.
A polarizáció adott „A” felületen megjelenő „Q” töltéskülönbséget jelent. Ha a töltésre fejezzük ki az első egyenletet, és figyelembe vesszük, hogy a töltés a fémfelületek miatti un. piezo-kondenzátor fegyverzetein jelenik meg, úgy ezek között „up” villamos feszültség alakul ki:
|
|
Az átalakító első egyenlete mutatja, hogy rendszer típus váltás mellett változó típus váltás is történt.
Az átalakító második egyenletében az alakváltozást „Δx” fogja jelölni, a kerámia nyugalmi hossza pedig marad „l”. Átrendezés után az alábbi forma jön létre:
|
|

Az elektromos erőtér hatására létrejövő eltolási áramsűrűség „Jd”.
Definíció szerint:  , továbbá az áramsűrűség és az áram kapcsolata
, továbbá az áramsűrűség és az áram kapcsolata  .
.
Ha a második átalakító egyenletét idő szerint deriváljuk, akkor az alakváltozási sebesség és az eltolási áramsűrűség közötti kapcsolatot kapjuk:
|
|
Figyelembe véve az áram és az áramsűrűség közötti kapcsolatot, amely lényegében a kerámia felületével függ össze, végül a következő alakhoz jutunk:
|
|
Immár az átalakító második egyenlete is azokat a jellegzetességeket mutatja, mint az első.
Írjuk fel végezetül a két átalakító egyenletet olyan formában, hogy szokás szerint az egyik oldalon a mechanikai, a másikon pedig a villamos változók szerepeljenek:
|
|

Az átalakító egyenleteiben a változókat kisbetűvel jelöltük, utalva arra, hogy ezek időbeli változók. Látható, hogy két eltérő típusú fizikai rendszert úgy köt össze a piezoelektromos átalakító, hogy az összekapcsolt változók ellentétes típusúak.
Az energia átalakító átalakítási tényezője:
|
|

Megjegyezzük, hogy a különféle szakirodalmak a fordító váltó átalakítási tényezőjét másként is definiálhatják. Előfordul, hogy a fent látható összefüggés reciprok értéke az átalakítási tényező. A lényegen ez nem változtat.
Rendkívül fontos meggyőződnünk arról, hogy az eddig felírt egyenletek dimenziójukat tekintve helyesek-e? A „Kp” piezoelektromos együtthatónak két dimenzióját is láttuk: C/N és m/V.
Elsőként ellenőrizzük ezek azonosságát:
|
|
Majd megvizsgáljuk a fordító váltó átalakítási tényezőjének dimenzió helyességét:
|
|
Mindkét esetben helyes eredményeket kaptunk, az átalakítási tényezővel egymásba átszámíthatjuk az eltérő típusú rendszerekhez tartozó impedanciákat.
A dinamikai tulajdonságok tervezésének bemutatására nézzük először a piezoelektromos gyorsulásérzékelő szerkezeti vázlatát és az abból megszerkeszthető gráfját. A műszerházban látható szeizmikus tömeget vagy csavarkötéssel, vagy nagy merevségű rugóval szorítják a piezokerámiához. Csavarkötés esetén, a kerámia közepén furat található. A szerkezeti vázlaton látszik, hogy 3 független keresztváltozó definiálható, egy a referencia, egy a műszerház sebessége, ami a referenciához viszonyítva a bemenő mennyiség integráltja (gyorsulást mérünk), és a szeizmikus tömeg referenciához viszonyított sebessége.
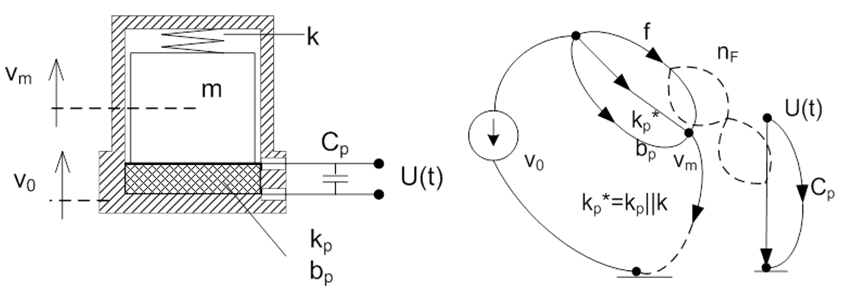
A fordító váltót a ház és a tömeg sebessége közé kell kötni, hiszen a gyorsító erő (Fa=m·a) hozza létre a kerámia deformációját a tömeg és a műszerház fala között, és ezzel az „up” kimeneti feszültséget. Ez a feladat annak illusztrálására is jó, hogy nem szabad mechanikusan szerkeszteni a gráfokat. Jelen esetben a fordító váltó bal oldalán a gráf éle nincs a referenciához kötve.
A rendszer annyira egyszerű, hogy a megoldáshoz kínálkozik az impedancia módszer. Az eredeti bemenet keresztváltozóból származtatott mennyiség (gyorsulás), a kimenet pedig az átalakító egyenletével adódik a ház és a szeizmikus tömeg közötti alakváltozási sebesség (kerámia alakváltozása) felhasználásával. A jobb oldalon egyetlen villamos elem, a kerámia villamos kapacitása szerepel. Éppen ezért célszerűen ezt a kapacitást számoljuk át egyenértékű mechanikai elemmé. Az átszámítás módját az energia átalakítók általános tárgyalásánál már megmutattuk. Az impedanciák közötti átszámítás érdekében osztjuk egymással az átalakító két egyenletét:
|
|
Ezek szerint olyan energia tárolókat kell összeválogatnunk, amelyek esetében az „s” operátor egyszerűsítése révén eltűnik a paraméterek közötti átszámítás képletéből. A kondenzátor villamos impedanciája 1/sC, ehhez csak olyan mechanikai admittancia párosítható, amelynek a nevezőjében van az operátor:
|
|

Ezek szerint a piezo-kondenzátornak, a mechanikai oldalon, egy rugómerevség felel meg.
|
|

Az energia tárolók ellentétes típusra való „fordulását” tetézi az, hogy a dualógia (duálisan analóg) szabályai miatt a két oldalon szereplő impedancia kapcsolások is ellenpárjukra váltanak. Sorosból párhuzamos és fordítva lesz az ellenkező oldalon. Ennek következtében a kapacitásból számított rugómerevség a mechanikai rugómerevségekkel párhuzamosan kapcsolva, azok eredő értékét növeli:
|
|
Ezek után már felrajzolható a legegyszerűbb impedancia hálózat, és felírható a keresztváltozó osztó, mint implicit átviteli függvény.
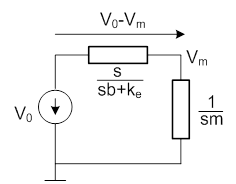
|
|
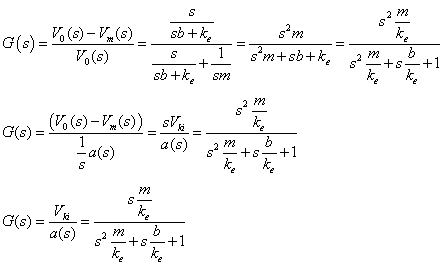
A „Vki(s) alakváltozási sebesség az átalakító egyik egyenlete segítségével villamos mennyiséggé számítható át, és ez az eltolási áram „I”.
|
|
Tudjuk, hogy az áram a töltés idő szerinti deriváltja, valamint azt, hogy a töltések révén a „Cp” piezo-kapacitás fegyverzetein létrejövő feszültségkülönbség „Up”, éppen a keresett villamos kimenet:
|
|
Behelyettesítve a kapott átviteli függvénybe:
|
|
És végül, a valójában keresett átviteli függvényt kapjuk, gyorsulás bemenetre és villamos feszültség kimenetre:
|
|
A modell helyességét legegyszerűbben dimenzió analízissel ellenőrizhetjük. Az első dimenzió egyenlet az átviteli függvény bal, a második a jobb oldalának dimenzióját mutatja:
|
|
Dinamikai szempontból a piezoelektromos gyorsulásérzékelő másodrendű rendszer, un. PT2-tag. A méréstechnikában szokásos a Bode-diagramot normált formában megadni, így látjuk ezt az adatlapokon is. Ez azt jelenti, hogy a frekvencia-függő átviteli tényezőt |G(ω)| egy igen alacsony frekvencián mért átviteli tényezőre |G(ω=ωref)| vonatkoztatják, és így egyrészt dimenzió nélküli lesz a Bode-diagram függőleges tengelye, másrészt a görbe a zérus dB szinten indul. Mindaddig, amíg a görbe ±0.1 dB értékkel nem tér el a vízszintestől – ez mintegy ±1% hibát jelent, - az eszköz átvitelének arányos szakaszán „vagyunk”, és a mérés az adott frekvenciatartományban lehetséges. Azt a frekvenciát, ahol az eltérés meghaladja a ±0.1 dB értéket, a mérési tartomány felső határfrekvenciájának nevezzük. A bevezetőben már jeleztük, hogy ez a felső határfrekvencia magas lehet, esetenként, akár ff=50 kHz (vagy ωf=50·2π r/s), ugyanakkor hátrányos, hogy alacsony frekvenciás gyorsulások mérésére az eszköz nem alkalmas a töltések elszivárgása miatt. Használatba vétel előtt meg kell győződni a gyorsulásérzékelő és a hozzá kapcsolt töltéserősítő működési frekvenciatartományáról.
A modellezést három fontos aktuátorral folytatjuk. Tekintettel arra, hogy az előzőekben bemutatott piezoelektromos szenzor fordító váltót tartalmazott, didaktikai okok miatt az aktuátorok közül is azt vesszük elsőként, amelyik fordító váltóval épül fel.
6.2. Pneumatikus és hidraulikus munkahenger. Fordító váltók a gyakorlatban
A pneumatikus és hidraulikus átalakítók fordító váltó jellegű energia átalakítók. A fordító váltó két eltérő típusú fizikai rendszer eltérő típusú változói között teremt kapcsolatot (ld.: 2. fejezet).
A mechatronika egyik legfontosabb építőeleme a munkahenger. A hidraulikus munkahengereket kifejezetten erő, energia átvitelére tervezik, és működtetésük folyadék térfogatárammal, míg a pneumatikus munkahengerek működtetése a sűrített levegő nyomásával történik. A két aktuátor forrása tehát eltérő típusú. A pneumatikus munkahengerek (lineáris és rotációs) ugyancsak képesek az elektromechanikus rendszerekre jellemzőtől nagyobb erők kifejtésére, de túlnyomórészt csak „digitális” üzemmódban alkalmazzák őket, a lökethossz tetszőleges pozíciójában megállítani csak igen körülményes szabályozó rendszer segítségével lehet. Ilyen a szervopneumatikus pozicionáló, amelynek egy megvalósítási formáját a 18. fejezet fejezetben találjuk.
6.2.1. Hidraulikus munkahenger modellje
A működési vázlaton látható, hogy legegyszerűbb lineáris forma egy hengerből és a dugattyúhoz csatlakozó rúdból áll. A beömlő csonk áramlási ellenállása nem játszik szerepet, mert átmenő változó forrásból térfogatáram van rákényszerítve. A henger belsejének folyadék kapacitása zérus, mert a közeg összenyomhatatlan, a fluid oldalon energiatárolás nincs.
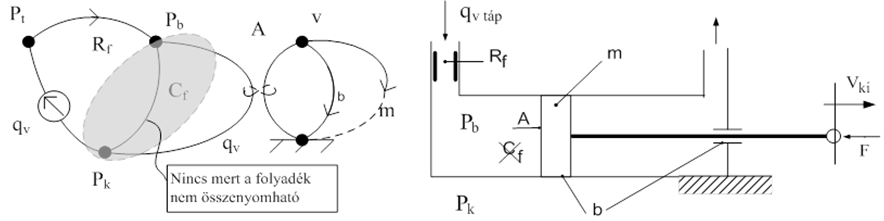
A gráf egyszerűsíthető, a „qv” bemenőjel teljes egészében megjelenik a fordító váltó bal oldalán. A váltó 2 egyenlete közül az, amelyik a térfogatáram és a dugattyú sebesség között írja le a kapcsolatot, megadja a mechanikai oldal sebesség forrását. Ilyen módon a mechanikai oldal elemei sem játszanak szerepet, hiszen a referenciától eltérő csomópont keresztváltozójának értékét előírjuk.
A munkahenger, mint fordító váltó egyenleteinek felírása nem igényel hosszadalmas levezetéseket, hiszen a változók közötti kapcsolat közismert. Annyi kiegészítés szükséges, hogy az erő és a nyomás közötti összefüggés tartalmaz egy negatív előjelet. Ez a csomóponti egyenletek felírása során nélkülözhetetlen, és egyben utal arra, hogy az erővektor és az „A” felület normálisa ellentétes irányúak.
|
|
A hidraulikus munkahenger dugattyújának sebességét és elmozdulását az alábbi összefüggés írja le:
|
|
Amint a következő ábrán is látjuk, a hidraulikus munkahenger integráló típusú tag, amennyiben a dugattyú elmozdulását választjuk kimeneti változónak, és a bemeneti mennyiség a munkahengerre kapcsolt állandó térfogatáram, egységugrás-függvény formájában.
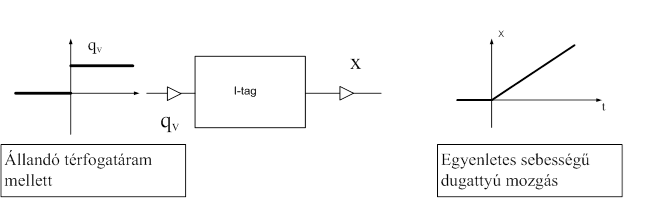
6.2.2. Pneumatikus munkahenger modelljei (átviteli függvény és ÁTM)
Lényegesen bonyolultabb a helyzet, ha a pneumatikus munkahenger modelljét akarjuk meghatározni. A rendszer fluid oldalán megmarad a belépő csonk (szűkület) által előidézett áramlási ellenállás, és megmarad a henger üregének energiatároló képessége is. A forrás, mint már jeleztük, nyomás, tehát keresztváltozó.
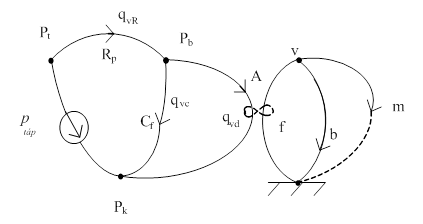
Mechanikai oldalon a tömeg és a dugattyú tömítései által létrehozott, nem kis értékű csillapítás az identifikálható két elem. A két energiatároló, a fliud kapacitás és a tömeg típusra azonosak lennének, de a két rendszerrész közötti fordító váltó miatt másodrendű lesz a rendszer.
Elsőként impedancia módszerrel vezetjük le a rendszer átviteli függvényét, mert az átszámítás tanulságos. A keresett kimenet a dugattyú sebessége, illetve elmozdulása, tehát célszerű a pneumatikus rendszerrész elemeit és forrását átszámítani a mechanikai oldalra. Annál is inkább, mert ez az átszámítás jól mutatja a dualóg rendszerek esetében adódó feladatokat. A végső, legegyszerűbb alak egy keresztváltozó osztó lesz. A végső hálózat terhelő impedanciája a mechanikai rendszerrészben látható két párhuzamos impedancia eredője.
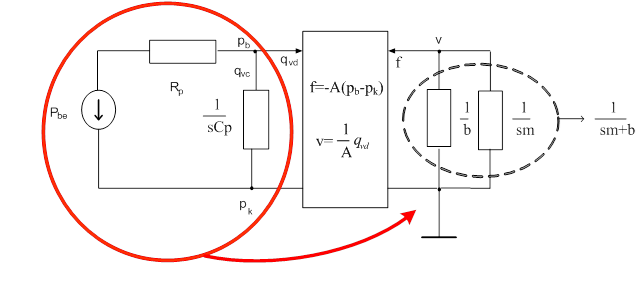
Az egyszerű keresztváltozó osztó kapcsolást mutatja a következő ábra. Az aktív rész „Zb” belső impedanciáját és az új „V0”keresztváltozó forrást a következő lépésekben fogjuk meghatározni.
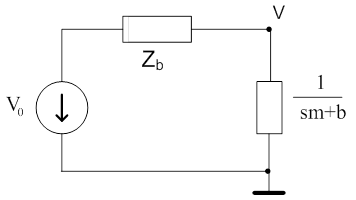
Az átviteli függvény formájában megadott modell az alábbi lesz:
|
|
A pneumatikus impedanciák átszámításához a már ismert módon kell a fordító váltó egyenleteit felhasználni. Az átalakító egyenleteit Laplace transzformált alakban írjuk fel:
|
|
A külső nyomást a vizsgálat idejére állandónak, sőt referenciának tekintjük. Mindkét oldalon elvégezzük az osztást, amelynek eredményeként a mechanikai oldalon admittanciát, a pneumatikuson impedanciát kapunk:
|
|

Feladatunk megtalálni azokat az elemeket, amelyek esetében az átszámítás során egyszerűsíthető az operátor.
|
|

Első próbálkozásunk eredménytelen, mert a pneumatikus rendszerekben nincsen „induktív” jellegű energiatároló. Ugyan a vizsgált pneumatikus rendszerben nem is találunk ilyen tárolót, de a teljesség kedvéért lefolytattuk a próbát. A másik mechanikai energiatárolóval már más a helyzet:
|
|

A pneumatikus rendszerrészben van kapacitív tároló, és látjuk, hogy ennek a mechanikai oldalon rugómerevség felel meg. Ezt a műszaki érzékünk alapján eddig is tudtuk, hiszen a pneumatikus kapacitás a légrugó szemléletes példája.
Az új mechanikai keresztváltozó forrás az átalakító egyenletéből adódik. Az átszámításnál, akárcsak az impedanciák esetében, nem vesszük figyelembe az előjelet.
|
|

Átszámítjuk tehát a pneumatikus kapacitást és az ellenállást, valamint azt is figyelembe kell vennünk, hogy a pneumatikus oldal kapcsolása is ellentétesre fordul a másik oldalon.
|
| ||
|
|


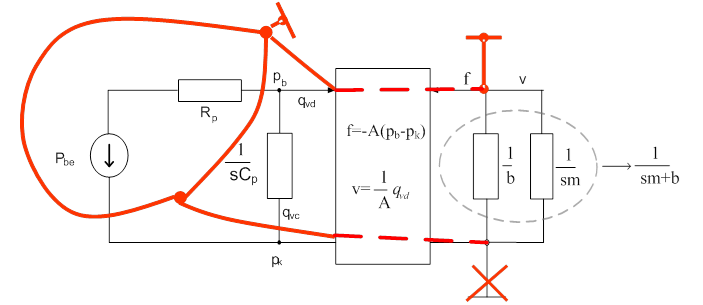
A dualóg (duálisan analóg) kapcsolás megszerkesztését segíti a fenti ábra. A pneumatikus oldalon kijelölünk a hurok helyére egy (ellentétes) csomópontot, és az új referencia is megjelenik csomópontként, ami az eredeti kapcsoláson kívüli teret helyettesíti. Az új csomópontokat úgy kötjük össze, hogy közben „átvágjuk” az eredeti kapcsolás impedanciáit, és az energiatárolók esetében ellentéteset teszünk a helyére. A disszipatív elem (ellenállás) jellegre nem változik. A fordító váltó szerepe megszűnik, az ábrán látható piros vonalat továbbhúztuk a mechanikai oldal felé. A mechanikai oldalon a rajztechnikai okok miatt felülre rajzoltuk át a referenciát.
A következő ábra az egyenértékű mechanikai rendszer impedancia hálózatát mutatja. Bejelöltük az aktív és passzív rész
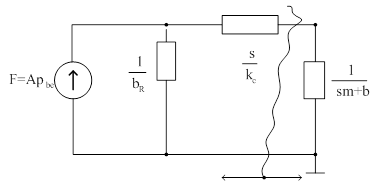
Az aktív rész „Zb” belső impedanciáját a szétválasztás után szabaddá váló kapcsok felől az aktív rendszerrész felé „benézve” határozzuk meg:
|
|
Az aktív rész egyenértékű keresztváltozó forrásának kiszámítása a következő feladat. Ebben az esetben a terheletlen aktív rész maximális keresztváltozó értéke az üresjárat, és ezért az s/kC impedancia nem játszik szerepet. Az erőforrás Thevenin ekvivalense az Ohm törvény révén számítható:
|
|
Minden együtt áll a legegyszerűbb kapcsolás megrajzolásához, és az átviteli függvény (keresztváltozó osztó) felírásához:
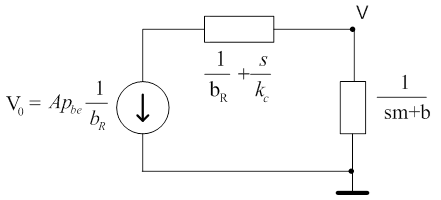
|
|

Az átviteli függvény szabályozástechnikai alakja, amely nevezőjében az operátortól független tag egyre van normálva, segíti a dimenzió ellenőrzést is.
|
| ||
|
|


A pneumatikus munkahenger túlcsillapított másodrendű tag. Az átviteli függvény karakterisztikus polinomjából a túlcsillapítás miatt két valós gyök származik, és ebből következően két időállandó. Az időállandók elkülöníthetőek: Tpneu= bR/kC és Tmech≈m/b. A mechanikai időállandó esetében jó közelítés jelölés azért indokolt, mert b»bR. Olyan rendszerben, ahol van visszahatás is, pl. két RC elemből álló, soros villamos rendszer esetében, az elsőfokú operátor együtthatója két időállandót és egy vegyes tagot is tartalmaz. Ebben az esetben viszont a dugattyúsúrlódást modellező „b” csillapítási tényező értéke meghatározó, vegyes tag elhanyagolható. A következő ábra az átmeneti függvényt (dugattyú sebesség) és annak integráltját (elmozdulás) mutatja, kissé torzított formában, mert a tranziens szakasz fel van nagyítva.
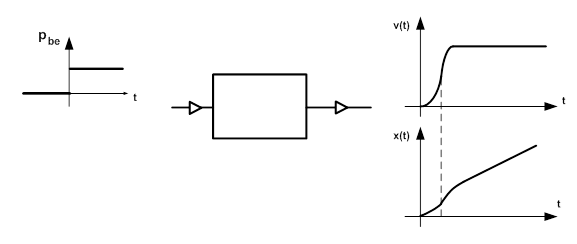
A lappangási idő oka kettős: A kamra belső nyomása az RpCp=bR/kC pneumatikus időállandó miatt fokozatosan alakul ki, és, ha az „A” felületre ható erő eléri azt a szintet, amely mellett a tömítés miatti súrlódási erőt képes legyőzni, megindul a dugattyú. E folyamatok miatt a pneumatikus munkahenger nem alkalmazható precíziós pozicionálásra. Ilyen jellegű feladatot a bevezetőben említett szervopneumatikus szabályozással, a dugattyú mindkét oldalán létrehozott, és szabályozott nyomásértékekkel lehet megvalósítani, ld.: 18. fejezet. Költségessége miatt az iparban eddig nem tudott átütő módon elterjedni.
6.3. Egyenáramú szervomotor és tachogenerátor modelljei. Váltók a gyakorlatban
A DC motor és a tachogenerátor az elektrodinamikus váltók csoportjába tartozik. A váltó olyan energia átalakító, amely két eltérő típusú fizikai rendszer azonos típusú változói között teremt kapcsolatot. (ld.: 2. fejezet).
Az elektrodinamikus átalakító (forgó és egyenes vonalú) működésének fizikai háttere a Lorentz erő és a mozgási indukció. E két törvény adja az adott konstrukció átalakítási tényezőjét, amelyet „nv” jelöléssel látunk el, az indexben utalva a váltó jellegre. A dinamikai modellezés eszköztárával foglalkozó fejezetben ismertettük az energia átalakítók három változatát.
Az elektrodinamikus váltó egyenleteinek meghatározásához először is vissza kell nyúlnunk a Lorentz erőhöz. A magyarázó szövegben megjelennek vektorok (dF, B, v, ds) és skalármennyiségek (i, q), ahogy ezt a törvény eredeti formájában bemutatjuk. Ismert, hogy a „B” mágneses indukciójú térben „v” sebességgel mozgó „q” elemi töltésre (definíciószerűen ez pozitív) dF részerő hat. Ha a töltés nem szabad térben, hanem vezetőben mozog, akkor áramról beszélünk. Ezért az előbbi mondat kiegészíthető azzal, hogy az „i” árammal átjárt vezető „ds” darabjára dF erő hat a „B” indukciójú mágneses térben.
|
|

A mechatronikában szokásos rendszerek esetében a tekercs, mint fő alkotórész egyértelműsíti, hogy az erőegyenlet második része az, amelyre jelen esetben építünk. Az összefüggés igen gyakran hibásan szerepel katalógusokban, mert az áramot vektorként tüntetik fel, holott nem az áram, hanem az áramsűrűség a vektormennyiség. Helyesebb a képletből kiindulni a magyarázatban. Ott ugyanis a „ds” vezetődarab a gépész számára egyértelműen vektort jelent, amelynek irányát a töltések mozgásának irányával lehet összefüggésbe hozni. Ismét óvatosnak kell lenni, mert a definíció pozitív „q+” töltésekről és nem a negatívakról „q-” szól. A keletkező erő irányának meghatározásánál ezért pozitív töltések mozgási irányának ismeretében a „jobbsodrású”, a negatív töltések esetében pedig a „balsodrású” vektorszámítást használjuk. A kezünk hüvelyk, mutató, és középső ujját egymásra merőlegesen „rendezzük”. Pozitív töltések esetében a jobb kéz hüvelykujja a töltések mozgásának iránya, a mutatóujj a mágneses indukció iránya, és a középső ujj a vektor-szorzás eredményeként megjelenő erő iránya. Történelmileg, és megállapodás szerint az elektromos áramlás iránya a pozitív töltéshordozók (valóságos vagy elképzelt) áramlásának irányával egyezik meg. Az áram irányának ilyen, hagyományos értelmezése a legtöbb vezetőben (pl. fémekben) ellentmond a valóságnak, mivel azokban a negatív töltéshordozók (elektronok) áramlanak. Gyakorlati okok miatt, e tény ellenére, áramirányon ma is a hagyományosan definiált áramirányt értjük. A szakirodalom beszél „műszaki” áram irányról is, ez az elektronok mozgása a negatív pólus felől a pozitív pólus irányába.
Ez az irány-probléma a keletkező erő irányának egyértelmű meghatározása miatt lényeges.
Az összefüggés alapján, a „ds” vezetődarabokból álló tekercsrész eredő, vagy „aktív” hosszára összegzés segítségével kapjuk a teljes „F” erőt. Mi is lesz a tekercs „aktív” része, az átalakításban résztvevő összes vezetőhossz? Az egyenlet választ ad erre a kérdésre is, mert abban a „ds” és a „B” mennyiségek vektorszorzata szerepel. Az erő létrehozásában tehát csak azok a „ds” vezetődarabok vesznek részt, amelyek metszik a „B” indukcióvonalakat. A szorzás vektoriális, tehát az erővonalak által bezárt szög szinusza határozza meg a szorzat nagyságát, amely így 90º esetében maximális.
Az összefüggés skalár és egyszerűbb alakban tehát így írható fel:
|
|

A csomóponti szabályok miatt ezt az egyenletet „ellátjuk” egy negatív előjellel. Ugyanakkor azt is tudjuk, hogy az „i” elektronáramot tekintve ez a negatív előjel a „valóságot” is tükrözi.
A zárójeles kifejezés a váltó egyik egyenlete:
|
|

A fejezet elején már említettük, hogy az áram hatására megmozduló vezetőben, a mágneses tér jelenlétében feszültség indukálódik. Az adott szerkezet felépítéstől függően a tekercs mozgása lehet forgó és lehet egyenes vonalú.
Az átalakító másik egyenlete a mozgási indukción alapul:
|
|
Tudjuk, hogy az elektromos és a mágneses terek egymással összefüggenek. Ha a „ds” vektor ismét az áram által átjárt vezetődarab, akkor a fenti összefüggést a következőképpen magyarázhatjuk. A „ds” vezetődarabban, azzal egy irányban „E” villamos erőtér jön létre, ha a vezetődarab „v” sebességgel mozogva metszi a „B” indukcióvonalakat. Definícióból tudjuk, hogy az „E” erőtér a pozitív villamos töltésekre hat. Ebből következően tudjuk, hogy a teljes, a mágneses erőteret merőlegesen metsző, tehát aktív vezetőhosszban az integrál alapján létrejövő uind indukált feszültség mely irányban mozgatja az elektronokat, és milyen lesz a teljes vezetőn fellépő polaritás.
Írjuk ezt az összefüggést is egyszerűbb alakba:
|
|

Fentebb láttuk, hogy a zárójeles kifejezés az átalakítási tényező:
|
|

Az elektrodinamikus átalakító két egyenlete a szokásos formában felírva mutatja, hogy a két irány között számértékét tekintve ugyanaz a tényező szerepel, és azonosak a dimenziók is, az eltérés csupán látszólagos. Ezt az impedancia módszer alkalmazásánál és a dimenzió ellenőrzésnél kell tudni. A „r” (radián) dimenzió nélküli mennyiség.
|
|
Az átszámítás során, az átalakítási tényező négyzetének esetében, a gyorsabb ellenőrzés érdekében, a következő dimenzióval célszerű számolni:
|
|

A következő alfejezetekben példákat mutatunk be elektrodinamikus váltót tartalmazó rendszerekre
Az alcímben szereplő aktuátor és szenzor mellett a mechatronikában, és általában a műszaki életben sok ilyen típusú váltót tartalmazó eszközzel találkozunk. Ilyen az elektrodinamikus hangszóró, a dinamikus mikrofon, az elektrodinamikus rázóasztal, a merülő tekercses lineáris motor.
6.3.1. A DC motor (aktuátor)
A mechatronikában jelenleg talán leggyakrabban alkalmazott aktuátor és szenzor a DC motor, és „inverze” a tachogenerátor. A működésük fizikai elvei szétválaszthatatlanok, de méretre és műszaki paramétereiket tekintve természetesen jelentősen eltérnek egymástól. Alapvetően mindkét esetben elektrodinamikus energia átalakítóról van szó, ami annyit jelent, hogy működésükhöz kettő plusz egy dolog szükséges: Az első kettő a mágneses tér (állandó, vagy változó) és villamos vezetőből megfelelően kiképzett tekercs. A tekercsben megjelenő áram és a mágneses tér kölcsönhatására a tekercsre erő hat, és létrejön a mechanikai mozgás, amelynek fizikai alapja a Lorentz erő. Ugyanakkor abban a pillanatban, amikor az áram hatására „megmozdul” a tekercs, hat az elektrodinamika másik törvénye, és a mozgási indukció miatt, a tekercs két végpontja között megjelenik az indukált feszültség. Gépész alapokon álló szakember nem felejtheti el, hogy szabályos mozgások csak vezetékkel biztosíthatók. Ez a „plusz” feltétel. Motor és tachogenerátor esetében csapágyazás, lineáris, merülő tekercses motor esetében pedig többnyire rugalmas egyenes vezeték.
A motor esetében a „kivehető” mechanikai teljesítmény érdekében nagyobb áramokra tervezik a tekercseket és a keféket, míg a tachogenerátor esetében az eszköz „jelet” és nem teljesítményt szolgáltat. Méretezése is ennek megfelelően történik.
Meg kell jegyezni, hogy ez a „kettősség” az elektronikusan kommutált DC motorokra nem áll fenn. Az elektronikusan kommutált DC motorok felépítésben is eltérnek, mert ezeknél a forgórész állandó mágnes, tehetetlenségi nyomatéka ennek megfelelően nagyobb, és az állórész tekercseit szekvenciálisan gerjesztve hozzák létre a forgó mágneses teret, mozgásba hozva a forgórészt.
A klasszikus DC motor állórésze állandó mágnesből és lágyvasból álló mágneses kör, amelynek a légrésében forog a tekercs, a forgórész. A tekercselés lehet serleg alakú, és lehet lapos kivitelű. Az állandó forgásirány biztosítása un. kommutátor és érintkező kefék segítségével történik. A kefék anyaga kopásálló ezüst ötvözet, nagyobb gépeknél grafit. A kereskedelemben kapható kisebb, a mechatronikában alkalmazott kefés DC motorok esetében leggyakrabban 3, 5, vagy 7 tekercs bekezdés található a forgórészen. A több bekezdéssel a motor villamos forgatónyomatékának egyenletesebbé tétele érhető el. A valóságban ezek a motorok „lüktetve” járnak, a Lorentz erő által létrejövő nyomaték kisebb-nagyobb mértékben ingadozik a forgórész körülfordulása során. A modellezés során, ennek ellenére a szögelfordulás függvényében állandónak tekintjük a villamos eredetű forgatónyomatékot. A motorra jellemző váltó állandót gépállandónak, vagy nyomatékállandónak nevezik. Definíciója szerint, és skalár alakban:
|
|
ahol „Φ” a légrés fluxus, „c” a motor műszaki jellemzőit foglalja magába: „z” a forgórész kerületén lévő vezetők száma, „p” az állórész mágnese pólusainak száma (2p a pólus-pároknak felel meg) és „a” a párhuzamos ankerág-párok száma (hullámtekercselésnél a=1, huroktekercselésnél a˃1).
Tehát a DC motor, mint elektrodinamikus váltó esetében, a váltó állandója nv=KM. Ezzel az alábbi összefüggéseket kapjuk:
|
|

A motor általános felépítését az alábbi ábra mutatja. A képen látható tekercselés speciális, ennél a serleges kialakításnál a Faulhaber licenc alapján készült. Tulajdonképpen önhordó kompozitról van szó, amelyben a mátrix műgyanta, a villamos vezető pedig a szálmerevítés. A tekercselés menetei a merevség növelése érdekében szimmetrikusan keresztezik egymást, a menet a motor hossztengelyéhez viszonyítva szöget zár be. Az emiatt keletkező axiális erőkomponensek párban kiegyenlítik egymást.
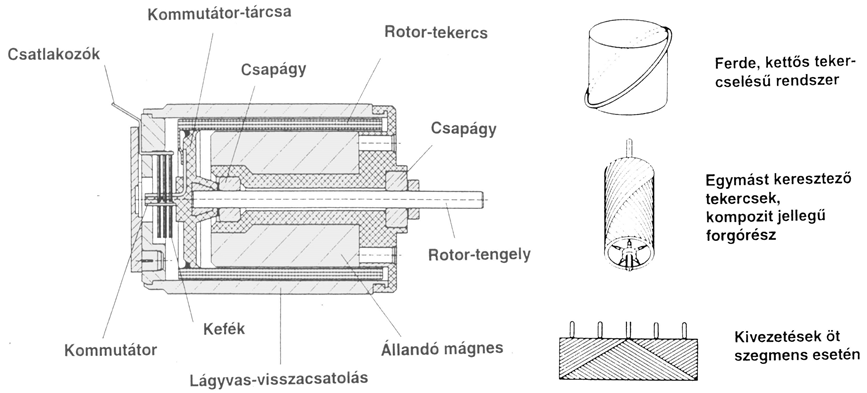
A szerkezeti vázlat alapján megszerkeszthető a motor gráfja. A villamos rész két elemet tartalmaz, a tekercs ellenállását és a nyugalmi induktivitását. Ez utóbbi azt a fizikai jelenséget modellezi, amely szerint a mágneses térhez képest nyugalomban lévő tekercsben villamos feszültség indukálódik, amely a tekercsben fellépő áram időbeli változásával függ össze. Induláskor, ha a motor bemenetére ube(t) villamos feszültséget, „kapocsfeszültséget” kapcsolunk, a forgórész (armatúra) tekercsében exponenciálisan felfutó áram maximális értékű lesz, majd a mozgási indukció révén indukálódó feszültség miatt ez az áram korlátozódik a fordulatszám növekedésével, hiszen a kapocsfeszültség és az indukált feszültség egymás ellen hatnak.
A váltó mechanikai oldalán két passzív elem van, a tekercs tehetetlenségi nyomatéka és a csapágysúrlódást modellező csillapítási tényező. A gráfban a mechanikai oldalon egy átmenő változó forrás képében megjelenítettük az időben változó terhelő nyomatékot. Ha ezt a gráf élet elhagyjuk, a motor üresjárati modelljét kapjuk. Az összetett mechatronikai rendszerekben ezt a terhelő nyomatékot jelképező gráf élet például a valós hajtómű eredő torziós rugalmassága váltja fel, és utána következik a hajtómű többi eleme.
A következő ábra egy kisebb teljesítményű, a mechatronikában, főként a robottechnikában alkalmazott motortípus nyomaték-fordulatszám jelleggörbéjét mutatja.
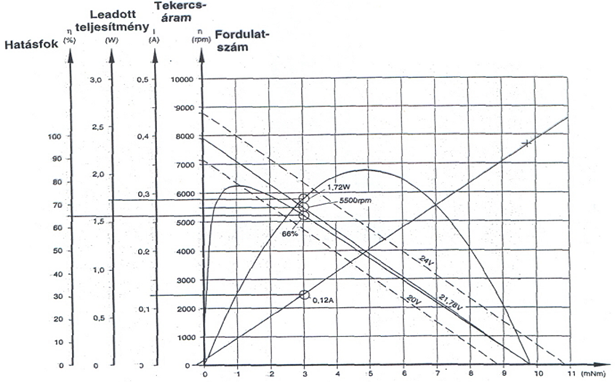
A teljesség kedvéért, és a módszerek összehasonlítása érdekében mindhárom módszert bemutatjuk a matematikai modellek felírásához, és bemutatjuk modellek közötti átszámítási lehetőségeket is:
Hurok/csomóponti módszer→Mátrix-egyenlet→Átviteli függvény →Differenciálegyenlet→Állapottér modell
Hurok/csomóponti módszer→Állapottér modell→Átviteli mátrix→Átviteli függvény
Impedancia módszer→ Átviteli függvény→(Differenciálegyenlet)
6.3.1.1. Hurok és csomóponti módszer
A DC motor példája és gráfja egy lényeges, gyakorlati modellezési szabály bemutatását teszi lehetővé. Ismeretes, hogy egy gráf esetében a változók meghatározására csomóponti, vagy hurok egyenleteket írunk fel. Az egyenlet típusok nem keverhetőek. Az összes keresztváltozó a csomóponti, míg valamennyi átmenő változó a hurok egyenletek alkalmazásával írható fel.
Olyan gráfok esetében azonban, amelyekben energia átalakító található, ez a megkötés felesleges, és csak a különböző rendszerrészekre korlátozódik. Miután a rendszerrészeket egy konstans köti össze, lehetséges minden részben más-más módszert alkalmazni.
A DC motor esetében a villamos részre célszerű hurok egyenletet felírni, míg a mechanikai oldalra csomópontit. A villamos „i” hurokváltozót egy konstans, a „KM” köti a mechanikai oldal csomóponti egyenleteibe. A két egyenlet alatt megjelenítettük a váltó egyenleteit is, hiszen ezek nélkül az egyenletek nem köthetők egymáshoz.
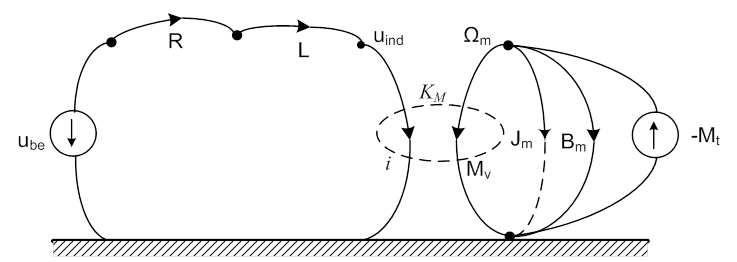
Az „i” hurokváltozó célszerűen kijelölt iránya meghatározza a keresztváltozó különbségek előjelét, ami egyezik, pozitív, ami nem, negatív. Az „Ω” csomóponti változóra felírt egyenleteknél legyen pozitív a kifelé mutató élek, és negatív a befelé mutató élek előjele. A szimulált terhelő nyomatékot a gráfban átmenő változó forrásként modellezzük, mert nincsen más szimbólum, de a negatív előjel utal arra, hogy nem gerjesztésről, hanem forgatónyomaték „kivételről” van szó.
|
|
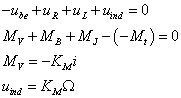
Behelyettesítve a fizikai és a váltó egyenleteket, az alábbi differenciálegyenlet rendszert kapjuk:
|
|
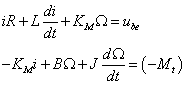
Ezt az alakot minden hasonló esetben „forrás-értékű” alaknak tekinthetjük, és megtaláljuk több szakirodalomban, például a B. C. Kuo Önműködő szabályozott rendszerek című munkájában [6.2.] is. Megjegyezzük azt is, hogy hálózati módszerrel kevesebb munkával tudtuk ezt a differenciálegyenlet rendszert felírni, mint az energia módszerrel, lásd: 1. fejezet. Forrás-forma, mert ezen a ponton elválhatnak ugyanis a további utak:
Ha állapottér modellt kell felírnunk, akkor ezt a legcélszerűbb ebből a formából kiindulva megtenni.
Ha átviteli függvény, és/vagy differenciálegyenlet keresett, akkor Laplace transzformálás után algebrai egyenletrendszert hozunk létre, majd a további lépések a mátrix-vektor műveletek alkalmazásával lehetségesek.
Elsőként legyen keresett az átviteli függvény, és a vele kapcsolatos differenciálegyenlet, ezért Laplace-transzformáljuk a két differenciálegyenletet. A nagybetűk a változók Laplace transzformáltját jelentik:
|
|
Mátrixos alakba írjuk az egyenletrendszert:
|
|
Bizonyos szabályosságok azonnal felismerhetők. A hurokegyenletből származó sorvektor impedanciákat és az átalakító konstansát, a csomóponti egyenletből származó sorvektor admittanciákat és az átalakító konstansát tartalmazza. A főátló elemei pozitívak.
Tovább lépve el kell dönteni, hogy mindkét változót keressük, vagy csak az egyiket. Ha mindkettőt, akkor a mátrixot invertálni kell:
|
|
Az invertáláshoz kijelölt műveleteket ebben a feladatban nem végezzük el, először a motor jellegzetes kimenőjelére, a szögsebességre írjuk fel a modelleket. Ha csak egy változó keresett, akkor célszerű a Cramer szabályt alkalmazni:
|
|
Elvégezzük a műveleteket, és az operátor csökkenő hatványai szerint rendezzük a nevezőt:
|
|
Az operátortól független taggal beosztva két átviteli függvényre és a hozzájuk kapcsolódó bemenőjelekre választjuk szét a kapott alakot:
|
|

Felismerhető a szuperpozíció szabálya, amelyet az impedancia módszer esetében kell, majd alkalmazunk, több forrás előfordulása esetén. A szuperpozíció felhasználása természetesen csak lineáris rendszerek esetében jöhet szóba.
A két átviteli függvény a két forrás felől nézve külön-külön adja meg a kimenőjel egy-egy részét:
|
|

Mindkét átviteli függvény karakterisztikus polinomja azonos, hiszen egyazon rendszer viselkedését írják le. A rendszer másodrendű, hiszen két energia tárolója van, „L” és „J”. Szép példája ez a mechatronikai részrendszerek energia átalakítón keresztül megvalósuló egymásra hatásának, hiszen egymás mellett szerepelnek az eltérő típusú rendszerekhez tartozó paraméterek.
Az átviteli függvényekből a differenciálegyenlet inverz Laplace transzformáció segítségével előállítható. Nézzük a „GU” átviteli függvényt:
|
|
Az átviteli függvényben az általános paraméteres jelölést alkalmaztuk, mert az operátor négyzetes tagja melletti „a2” paraméterben összefoglalt összefüggés nem azonos az időállandó négyzetével. Itt ugyanis megjelennek a disszipatív paraméterek. Az „átszorzás” eredményeként először a differenciálegyenlet operátor térbeli formáját kapjuk, majd inverz Laplace transzformálás után a keresett időtartománybeli modellt.
|
|
Az állapottér modell ebből a másodrendű differenciálegyenletből is előállítható, visszavezetéssel. A kapott modellt az állapotirányításban „normál” alaknak is nevezik. A német szakirodalomban a „normál alak” megjelölést azért alkalmazzák, mert a stabilitás tervezése, a gyökök elhelyezkedésének megadása révén, e forma alkalmazásával egyszerű. Megjegyezzük, hogy magasabb rendszámú differenciálegyenletek esetében ez a módszer szükségképpen olyan állapottér modellhez is vezethet, amelyben az állapotjelzők egyike-másika mögött nincs valós, mérhető fizikai jellemző. Jelen esetben, a visszavezetés módszerével, a szögsebesség és a szöggyorsulás lesz a két állapotjelző. Ha gyakorlatban nem is minden esetben, de ez a két fizikai mennyiség legalább elvben mérhető.
|
| ||
|
|

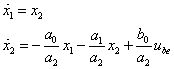
Az állapottér modellre a későbbiekben még visszatérünk.
A mechatronikában, különösképpen a robottechnikában alkalmazott kisméretű DC motorok „L” nyugalmi induktivitása igen csekély, és a jó csapágyazásnak, valamint a kis kefesúrlódásnak köszönhetően szintén kicsi a „B” csillapítási tényező értéke is. Ezért találjuk meg a gyártók katalógusaiban az un. elektromechanikus időállandót az adatok között, és azt az ajánlást is, hogy a motort elsőrendű rendszerként célszerű modellezni.
A motor un. üresjárati átviteli függvénye, ha „L” és „B” paraméterektől eltekintünk:
|
|
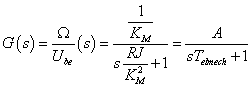
A szabályozástechnikában gyakran a fenti átviteli függvénnyel közelítik a DC motor dinamikai viselkedését. Ha a motorhoz „ideális” hajtómű is csatlakozik, akkor az átviteli függvény alakja nem változik, csak az időállandó. Annak ellenére, hogy a nagyobb tehetetlenségi nyomaték hatásaként elvárható lenne az időállandó csekély növekedése, a hajtómű súrlódásai miatt az időállandó a gyakorlatban kisebb lesz, a motor-hajtómű egység „kifutási görbéje” megrövidül. Erről részletes magyarázat található az 1. fejezet fejezetben, és a jelenségről könnyű kifutási mérésekkel meggyőződni.
6.3.1.2. DC motor állapottér modellje
Ahogy a hurok-és csomóponti egyenletek felírásánál jeleztük, ott található az a „stratégiai” pont, ahol a célnak megfelelő utak szétválnak. Láttuk, hogy az egyenletek Laplace transzformálása révén algebrai egyenletrendszert kapunk, és a keresett változó(k) meghatározása mátrix-vektor műveletekkel történik.
Ha a másik utat kell járnunk, mert a cél az állapottér modell felírása valós, mérhető fizikai változók formájában megjelenő állapotjelzőkkel, akkor a hurok és csomóponti egyenletekben kell definiálni az állapotjelzőket:
|
|
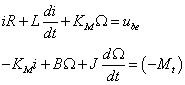
Az induktivitás, mint energiatároló állapota az átmenő változó segítségével (i) írható le. A tehetetlenségi nyomaték állapotjelzője a keresztváltozó (Ω) lesz. A bemeneti vektor két függvényt tartalmaz.
|
|
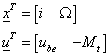
Az állapottér modell (ÁTM) főegyenlete a fentiekkel így írható fel:
|
|
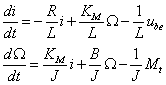
A főegyenletet mátrixos alakban is felírhatjuk, mert a paraméterek állandók és az egyenletrendszer lineáris:
|
|
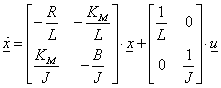
Az „A” rendszermátrix és „B” bemeneti mátrix vizsgálata révén azonnal eldönthetjük, hogy helyesen írtuk-e fel a modellt? A rendszermátrix négyzetes (nxn, ahol n a rendszám), a főátlójának elemei negatívak, ez a stabilitás egyik előfeltétele. Az egyes tagok dimenzió analízise is helyes eredményt ad, érdemes tehát továbblépni.
Ha a kimenetek között kíváncsiak vagyunk a motor tengelyének szögelfordulására is, akkor bővíteni kell a rendszermátrixot. Ez több mechanikai rendszert, vagy rendszerrészt tartalmazó feladatban problémaként merülhet fel. A lineáris és rotációs mechanikai rendszerekben van ugyanis egy természetes „származtatási” rend. A keresztváltozóból integrálással és deriválással további változók állíthatók elő. Ilyen más rendszerben nincs, csak a villamos rendszerben az áram és a töltés kapcsolata. Kezdeti feltételek nélkül tekintsük át a kapcsolatokat:
|
|
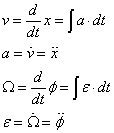
Az így bevezetett új „φ” állapotjelző nem valós állapotjelző, mert a rendszerben nincsen olyan energia átalakító, amelynek leírásához szükség lenne rá, ugyanakkor előfeltétele az újabb kimenet felírásának. A módosított ÁTM harmadrendű rendszert „sugall”, de ez csak a fentiekben leírtak miatt van így, a rendszám marad 2, csak az állapotjelzők száma nőtt 3-ra.
|
|
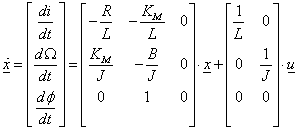
Az állapottér modell nagy előnye, hogy a főegyenlet megoldása után minden releváns változó kifejezhető az állapotjelzők lineáris kombinációjával. A kimeneti változók csoportja az alábbi lehetséges, lényeges változókat tartalmazhatja:
|
|

Az állapotjelzők természetszerűen elsők a sorban. Ügyelni kell arra, hogy az uL és az MJ kimenetek esetében deriválás nem lehet a formulában, tehát ezeket a kimeneteket a hurok és a csomóponti egyenletek újbóli felhasználásával lehet csak megadni.
|
|
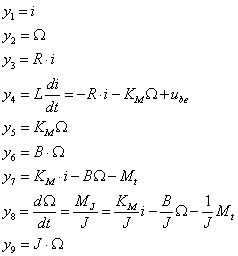
A kimeneti, vagy segédegyenlet is felírható mátrixos alakban, ahol a „C” a kimeneti és „D” a segédmátrix.
|
|
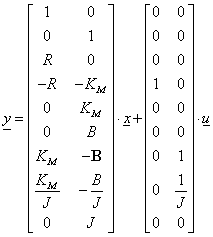
6.3.1.3. Műveletek a DC motor állapottér modelljével
Ennek az aktuátornak a modellje alkalmas arra, hogy olyan műveleteket mutassunk berajta, amelyek a rendszerek dinamikai viselkedésének vizsgálatához szükségesek.
Az átviteli mátrix W(s) meghatározása
Ha valamennyi bemenet és valamennyi kimenet között keressük az átvitelt, akkor az állapotegyenletek segítségével felírható az átviteli mátrix. Ebben az esetben operátor tartományban kell dolgoznunk, és nem vesszük figyelembe a kezdeti értékeket, mert általános, frekvencia-függő kapcsolatot keresünk.
A főegyenlet Laplace transzformálása után elhagyjuk a kezdeti feltéteket, és az állapotvektort behelyettesítjük a kimeneti egyenletbe. Az egységmátrixot  -vel jelöljük:
-vel jelöljük:
|
|
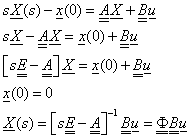
A DC motor esetében nem jelent gondot a 2x2-es mátrix determinánsának felírása.
|
|
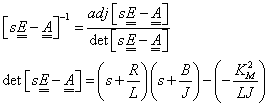
Nagyobb rendszám esetén, egy n·n méretű mátrix invertálásánál ügyelni kell az aldeterminánsok célszerű megválasztására.
Adott tehát az alábbi egyenlet:
|
|
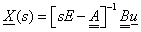
Következő lépésben az „X” állapotvektort behelyettesítjük a kimeneti egyenletbe, csoportosítjuk a műveleteket és előállítjuk a „ ” átviteli mátrixot:
” átviteli mátrixot:
|
|
ahol  , a rezolvens mátrix Lapace transzformáltja.
, a rezolvens mátrix Lapace transzformáltja.
Az állapotváltozók időfüggésének meghatározása Laplace transzformációval
A főegyenlet Laplace transzformálásával a következő alakhoz jutunk:
|
|
Az utolsó sorban látható egyenlet első tagja a homogén, míg a második a partikuláris megoldás Laplace transzformáltja. Az időtartománybeli műveletekkel való összehasonlítás érdekében most csak a homogén megoldást vizsgáljuk.
Észre kell venni azt is, hogy a Laplace transzformációs szabályok a deriválás esetében a 0- kezdeti értéket tartalmazzák. Ezen a helyen ismételten utalunk Fodor György munkájára, amely különbséget tesz a kiindulási x(0-) és a kezdeti x(0+) értékek között [3.1.]. Ez abban az esetben nem jelent gondot, ha a rendszer állapotjelzőinek „bekapcsolást” megelőző értékei azonosak a „bekapcsolás” utánival, tehát
|
|

Az állapotjelzők időbeli lefutásának inverz Laplace transzformációval történő meghatározásához az x(0-) értékekre van szükség. Fodor György megfogalmazása szerint a Laplace transzformáció a kezdeti érték kiszámítását „automatikusan” elvégzi helyettünk.
Abban az esetben, ha a változók nem „kanonikus” változók (állapotjelzők), és valamilyen okból szükség van a jobboldali kezdeti értékekre, az xi(0+) értékek az operátor térben a Laplace transzformáció kezdeti érték tétele segítségével határozhatók meg. A témáról bővebben Korondi Péter Rendszertechnika [2.4.] című elektronikus jegyzetében, és Fodor György fentebb említett könyvében olvashatunk.
A mátrix inverzió első lépésében képezzük a zárójelben található kifejezés eredményét:
|
|
Kiszámítjuk az adjungáltat, majd a determinánst. Az adjungált számítása általános esetben két lépésben történik. Először meghatározzuk minden mátrix elem aldeterminánsát, majd sor-oszlop cserét hajtunk végre. Az aldetermináns képzésnél ügyelni kell az elemek indexeitől függő előjelekre. 2x2-es mátrix esetében egyszerűen lehet eljárni, de végighaladunk a lépéseken:
Aldeterminánsok:
|
|
Majd a sor-oszlop cserét követően:
|
|
A következő lépésben meghatározzuk a determinánst:
|
| ||
|
|

Ha a szokásos módon átalakítjuk az összefüggést, akkor összehasonlíthatjuk a karakterisztikus polinomot azzal az alakkal, amelyet a hurok-és csomóponti módszerrel kaptunk:
|
|

Az invertált mátrix az alábbi formát veszi fel:
|
|
Az inverz mátrixot felhasználva érdemes ellenőrzésképpen az Ω(s)/Ube(s) átviteli függvényt kiszámítani, mert így lehetőség nyílik az összehasonlításra. Ezt az átviteli függvényt korábban a hurok-és csomóponti egyenletekből írtuk fel.
Tehát korábbról, az átviteli mátrixról tudjuk, hogy
|
|

és ebből a mátrix-vektor egyenletből az Ube bemenetet és az Ω kimenetet választjuk ki. Ennek megfelelően a kimeneti mátrix második sorára és a bemeneti mátrix első oszlopára lesz csak szükség a számításokhoz. A segédmátrixra nem lesz szükség.
|
| ||
|
|
A vektor-mátrix-vektor szorzás eredménye két szorzat tagként (KM/J és 1/L) jelenik meg az alábbi függvény számlálójában, a tört többi része skalár volt:
|
|
Ha a megszokott formában írjuk fel az átviteli függvényt, akkor meggyőződhetünk, hogy az eredmény megegyezik a hurok-és csomóponti egyenletekből kapottal.
|
|

Dimenzióellenőrzés:
|
|
A sikeres ellenőrzés után az eredeti kérdés még nyitott, nevezetesen, hogy miként kapjuk meg a keresett állapotjelzők időfüggvényét az inverz mátrix felhasználásával. Amint fentebb láttuk, a homogén megoldás az operátor térben a következő:
|
|
Az előzőekben már írtunk arról, hogy állapotjelzők időbeli alakjának kiszámításában, Laplace inverz transzformáció alkalmazása esetén, a legnagyobb könnyebbséget az jelenti, hogy nincsen szükség a kezdeti értékek meghatározására, elegendő a kiindulási értékek ismerete. Kanonikus változók esetén – ezeket a jegyzetünk keresztváltozónak, vagy átmenő változónak nevezi, másként ezek a „természetes” állapotjelzők, a kiindulási érték és a kezdeti érték meg kell, hogy egyezzen, mert semmilyen energiatárolót nem lehet zérus idő alatt feltölteni, állapotát megváltoztatni, olvashatjuk Fodor György: Lineáris rendszerek analízise című munkájában [3.1.]. Ezt az alábbi módon lehet kifejezni:
|
|

Kérdés, mi történik valós technikai rendszerekben akkor, ha van kiindulási érték x(0-), de ezen felül t=0 időpillanatban impulzus-szerű gerjesztés éri?
Idézzük Fodor Györgyöt az energiatárolók impulzus gerjesztéssel történő feltöltésével kapcsolatban. „Ha impulzust kívánunk vizsgáló gerjesztésként alkalmazni, akkor célszerű valamilyen előírással szabványosítani. Normalizáljuk impulzusunkat úgy, hogy egységnyi intenzitású legyen, és egyetlen jellemzője a  hosszúsága, hiszen amplitúdója
hosszúsága, hiszen amplitúdója  . …Célszerű az impulzushosszat is „szabványosítani”, mégpedig minél kisebbnek választani, mert ekkor az impulzus-válasz egyre kisebb „t” értékektől kezdve tekinthető függetlennek a gerjesztő impulzus hosszától. …Mit értsünk a formális alakban megadható – de matematikailag közvetlenül nem értelmezhető -
. …Célszerű az impulzushosszat is „szabványosítani”, mégpedig minél kisebbnek választani, mert ekkor az impulzus-válasz egyre kisebb „t” értékektől kezdve tekinthető függetlennek a gerjesztő impulzus hosszától. …Mit értsünk a formális alakban megadható – de matematikailag közvetlenül nem értelmezhető -  Dirac-impulzuson? …Határesetben egy végtelenül rövid és végtelenül nagy amplitúdójú, egységnyi erősségű impulzust kapunk. Ez azonban nem függvény, és semmilyen fizikai mennyiség nem változhat ilyen törvényszerűség szerint. … A Dirac-impulzus tehát csak rövid jelölése annak a
Dirac-impulzuson? …Határesetben egy végtelenül rövid és végtelenül nagy amplitúdójú, egységnyi erősségű impulzust kapunk. Ez azonban nem függvény, és semmilyen fizikai mennyiség nem változhat ilyen törvényszerűség szerint. … A Dirac-impulzus tehát csak rövid jelölése annak a  egységnyi erősítésű impulzusnak, amelynek
egységnyi erősítésű impulzusnak, amelynek  hosszúsága igen kicsi, mégpedig jóval kisebb a rendszer legkisebb időállandójánál is. …Fizikai szempontból a Dirac-impulzus semmivel sem absztraktabb a véges hosszúságú impulzusnál, vagy az egységugrásnál, hiszen a valóságban ilyen lefutású jelek sem hozhatók pontosan létre. A közelítést akkor alkalmazhatjuk, ha az állandó érték eléréséhez szükséges idő jóval kisebb a rendszer legkisebb időállandójánál.”
hosszúsága igen kicsi, mégpedig jóval kisebb a rendszer legkisebb időállandójánál is. …Fizikai szempontból a Dirac-impulzus semmivel sem absztraktabb a véges hosszúságú impulzusnál, vagy az egységugrásnál, hiszen a valóságban ilyen lefutású jelek sem hozhatók pontosan létre. A közelítést akkor alkalmazhatjuk, ha az állandó érték eléréséhez szükséges idő jóval kisebb a rendszer legkisebb időállandójánál.”
Eddig az idézet szöveg, amely többször is hangsúlyozza, hogy a valóságos energiatárolók feltöltését csak akkor lehet Dirac-impulzussal modellezni, ha a rendszer legkisebb időállandója lényegesen kisebb, mint a „feltöltéshez” alkalmazott impulzus időtartama. Ezért alkalmazzák például a modálanalízis méréstechnikájában (pl. rudak, lemezek sajátfrekvenciáinak felderítése céljából) az „impulzus-kalapácsot”, amellyel a Dirac-impulzust lehet a gyakorlatban közelíteni.
Ugyanakkor kétségtelen tény, hogy elméletben a Dirac-impulzus segítségével lehet a gerjesztés nélküli rendszerek súlyfüggvényét, modern szóhasználattal impulzus-válaszát meghatározni. Ez a függvény igen fontos rendszerjellemző függvény.
Behelyettesítve az ellenőrzött inverz mátrixot, az alábbi Laplace transzformált függvényeket kapjuk. A nagy méret miatt ismét alkalmazzuk az átviteli függvények esetében szokásos „ai” jelöléseket, de ezúttal a későbbi gyöktényezős alak előállítása miatt másként rendezzük:
|
|
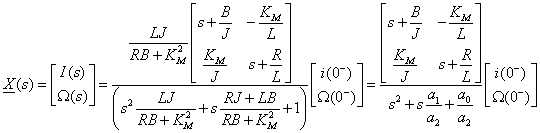
Az armatúra áram operátor térbeli alakja a fenti összefüggésből számítható ki. Az inverz transzformáció eredménye mindkét esetben a konkrét számértékektől függ, ettől függően, vagy exponenciálisan lecsengő lengéssel, vagy aperiodikus lefolyással kell számolni.
Az időfüggvények természetesen paraméteres formában is megadhatóak. Feltételezzük, hogy a két gyök konjugált komplex, tehát a DC motor másodrendű, és alulcsillapított, ha kis mértékben is. Az állapotvizsgálat üresjáratban történik, és csak az impulzusválaszt, más néven homogén megoldást adjuk meg, a Cannon: Dynamics of Physical Systems [2.2.] című, alapvető szakirodalom alapján.
Tehát legyenek a pólusok lengő esetre: s1=σa+jωa és s2=σa-jωa.
Paraméteres alakban ez a következőket jelenti:
|
|

Ha tehát lengő, alulcsillapított esetet feltételezünk, akkor teljesülnie kell az alábbi feltételnek:
|
|

Ezekkel a csillapított rendszer rezonancia körfrekvenciáját a következő formulával határozhatjuk meg:
|
|
Az időfüggvények meghatározásához fontos még az alábbi két összefüggés:
|
|

A fenti irodalomban található Laplace transzformációs táblázat szerint az alábbi időfüggvények tartoznak az operátor térbeli alakhoz, ahol σmech=1/Tmech és σvill=1/Tvill.
Az állapotjelzők általános megoldására a Φ(s) mátrix alkalmazásával az alábbi Laplace transzformált kifejezéseket kapjuk:
|
| ||
|
| ||
|
|



Paraméteres formában visszatranszformálás után az alábbi általános alakot kapjuk:
|
|

Kérdés, hogy mihez kezdünk műszaki értelemben ezzel a függvénnyel?
Például választ kapunk arra a kérdésre, hogy ha az i(0-) és Ω(0-) kiindulási értékek t=0+ időpillanatban, tehát az időtengely jobboldalán megszűnnek, a magára hagyott rendszer árama milyen módon fog az idő függésében változni.
Elméletben ezt homogén megoldásnak nevezzük.
Kérdés még, hogy a függvény második tagja valóban „A” (Amper) dimenziójú?
|
|
Figyelembe véve az inverz Laplace transzformált együtthatóját, amelynek dimenziója „s”, (ωa[1/s]) megnyugodhatunk, a függvény második része is „A (Amper)” dimenziójú.
Jól látható, hogy az kiindulási értékekről „elengedett” elektromechanikus rendszer áram függvényében a mechanikai rendszerelemek is „éreztetik” a hatásukat: Jelen van σmech=1/Tmech formában a mechanikai időállandó, és az ωa rezonancia frekvencia
|
|
ugyancsak elektromechanikus, vegyes kifejezés alakjában. A rezonancia körfrekvencia értéke csillapítatlan esetre könnyen ellenőrizhető, ha a két disszipatív elemet (R, B) zérusnak választjuk:
|
|
Az összefüggésben CJ=J/KM2, azaz a tehetetlenségi nyomatékkal egyenértékű villamos kapacitás. A képlet ismert a szakirodalomból, esetünkben nevezzük „elektromechanikus” Thomson képletnek.
Az előzőekhez hasonlóan járunk el a másik állapotjelző esetében is. Az Ω(s) Laplace transzformáltja ugyancsak a Φ(s) alapmátrix segítségével határozható meg:
|
|
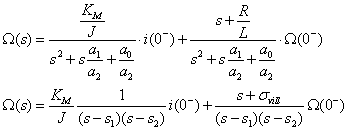
Visszatranszformálással kapjuk a keresett időfüggvényt:
|
|

|
|

A kapott időfüggvényben az áram esetéhez hasonlóan az tükröződik, hogy milyen lesz a forgórész szögsebességének időfüggvénye, ha az állapotjelzők kiindulási értékekeit t(0+) időpillanatban megszüntetjük.
6.3.1.4. Impedancia módszer
Az alábbi ábrán látható a DC motor impedancia hálózata.
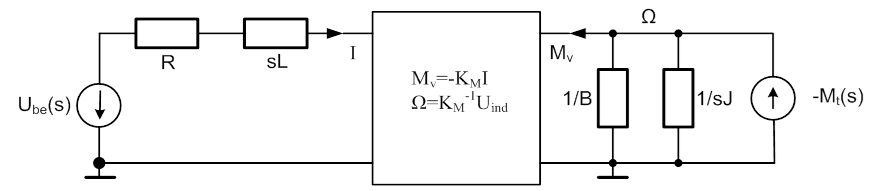
A hurok és csomóponti módszernél bemutatottakhoz hasonlóan, most is a motor normál üzemi jellemzőjére vagyunk kíváncsiak, azaz az Ω(s) szögsebességre. Két forrás van a rendszerben, ezért az impedancia módszer alkalmazása során a szuperpozíció szabályára támaszkodunk. Ennek szellemében, külön-külön vizsgáljuk a keresett változót, először az Ube(s) kapocsfeszültséget, majd az –Mt(s) terhelő nyomatékot választjuk bemenetnek, és a hatásokat összegezzük. Két átviteli függvényt kell tehát felírnunk. Az éppen aktuális bemenet a másik forrást nem forrásként, hanem annak belső ellenállásaként érzékeli. Ezt a megfelelő ábrákon jeleztük is, a nyomaték helyén szakadással, a kapocsfeszültség helyén rövidzárral.
Az első átviteli függvény legyen Ωu(s)/Ube(s)=Gu(s). Az indexek arra utalnak, hogy ebben az esetben nem a teljes keresett kimenetre kapunk összefüggést, hanem csupán az egyik bemenet felől nézve. Úgy kell tekinteni, hogy a másik forrás értéke jelenleg zérus.
A kapcsolást a keresett átviteli függvénynek alárendelve vontuk össze, alakítottuk át. Ennek lépéseit a modellezéssel részletesen foglalkozó fejezetben már bemutattuk. A mechanikai oldal párhuzamos impedanciáit eredőben vontuk össze. Ezen az eredőn jelenik meg a keresett változó, ezért célszerű az aktív részhez tartozó villamos oldalt a forrással együtt a mechanikai részre redukálni. Ha ez megtörtént, akkor a kapcsolás igen egyszerű lesz, mert egy keresztváltozó osztót képez.
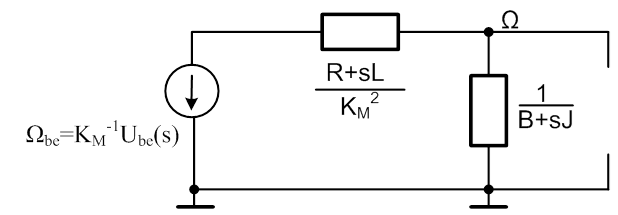
A két soros villamos impedancia eredőjét a mechanikai oldalra redukáljuk, és ehhez a váltó egyenleteit használjuk fel:
|
|
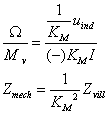
A keresztváltozó osztó a mechanikai impedanciák eredőjének meghatározása után már felírható:
|
|
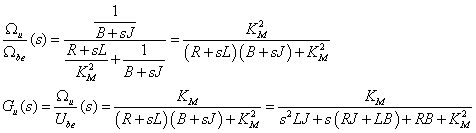
Ellenőrizhető, hogy a kapott eredmény egyezik azzal az alakkal, amit a hurok és csomóponti módszer segítségével vezettünk le.
A következő lépésben a terhelő nyomaték „felől” vizsgáljuk a rendszert, miközben kiiktatjuk a kapocsfeszültséget és azt rövidzárral helyettesítjük, hiszen az ideális keresztváltozó forrás belső ellenállása zérus. Az így kialakuló kapcsolás még egyszerűbb, mint az előző, hiszen a terhelő és a belső impedancia párhuzamosan vannak kapcsolva, az átviteli függvény egyszerűen az eredő impedancia lesz.
|
|

A két átviteli függvény felhasználásával felírható a végeredmény operátor tartományban:
|
|

Az átviteli függvények esetében szokásos alakra hozva:
|
|

Didaktikai szempontból célszerű az állapottér modellel kapott eredményt összevetni az impedancia módszerrel kiszámítottal. Mindkét bemenet szerepel az állapottér modellben is, de csak az Ω állapotjelző a „közös” kimenet a két eljárásban.
Válasszuk ezúttal a fenti függvényből a második tagot összeghasonlításul, hiszen az Ube(s) bemenet felől már felírtuk korábban az állapottér segítségével az átviteli függvényt, és összehasonlítottuk a hurok és csomóponti módszerrel kapott eredménnyel.
Az összehasonlítás érdekében vissza kell térnünk az állapottér modellből felhasználni kívánt egyenletekre. Ezekből az átviteli mátrixra van szükségünk, mert ez adja meg a minden bemenet és kimenet közötti kapcsolatot:
|
| ||
|
|

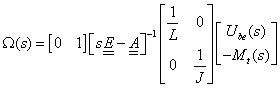
Behelyettesítjük az alapmátrixot, majd elvégezzük a kijelölt mátrix-vektor műveleteket:
|
| ||
|
|
Az állapottér modellből kapott átviteli függvényt úgy rendeztük, hogy a karakterisztikus polinom alakja megegyezzen azzal, amit az inverz Laplace transzformálásnál alkalmaztunk. Ehhez a számlálót és a nevezőt beszorozzuk az operátor négyzete mellett szereplő együttható reciprokával.
|
| ||
|
|

A kapott eredmény meggyőző, mert látható, hogy mind az impedancia, mind pedig az állapottér módszerrel kapott eredmény megegyezik egymással. A visszatranszformálástól eltekintünk, annak eredményét láttuk az állapottér modellnél.
Összefoglalva elmondhatjuk, hogy a DC motor modelljén, mint demonstrációs példán bemutattunk két hálózati módszert az egyenletek gyors és hatékony felírásához, majd bemutattuk az átszámítás lehetőségeit, és összehasonlítottuk a kapott eredményeket is. Ezek az alábbiak voltak:
Hurok/csomóponti módszer→Mátrix-egyenlet→Átviteli függvény →Differenciálegyenlet→Állapottér modell
Hurok/csomóponti módszer→Állapottér modell→Átviteli mátrix→Átviteli függvény
Impedancia módszer→ Átviteli függvény→(Differenciálegyenlet)
Ezeken túlmenően megmutattuk az állapotjelzők időbeli alakjának meghatározását a Laplace transzformáció segítségével. Az időtartománybeli megoldástól (Taylor sorfejtés) a modellezésben bemutatott nehézségek miatt „eltekintettünk”.
6.3.2. Tachogenerátor (szenzor)
Az „inverz” DC motor, a tachogenerátor (tacho: görög szó, sebesség) szögsebesség (fordulatszám) mérésére szolgáló aktív szenzor, működéséhez nem szükséges segédenergia, és a bemenő forgó mechanikai keresztváltozót közvetlenül villamos keresztváltozóvá alakítja, tehát váltóról van szó. Ebben az esetben a szenzor és a jelátalakító azonos fogalmat takarnak. Ha azonban a tachogenerátort egyenes vonalú mozgást végző tömeg sebességének mérésére alkalmaznak, pl. terelőgörgőkön átvezetett vonóelem segítségével, akkor a szenzor ugyan tachogenerátor, de a transzlációs sebességmérő rendszer már jelátalakító.
Az „inverz” jelzővel természetesen csupán az energia átalakító jelleget akartuk hangsúlyozni. Bár szerkezeti felépítésében megegyezik a DC motorral, lényeges különbségek is vannak. A forgórész tekercsein a motorhoz képest lényegesen kisebb áram folyik, itt nincs szó teljesítményről, csupán „jel” generálás a feladat. Ebből következik, hogy méretei, főként a vezető keresztmetszete kisebb.
Dinamikai szempontból ez az eszköz arányos tag, és ez igen nagy előny a szabályozástechnikában. A DC motor gráfjának segítségével azonnal érthető lesz ez a megállapítás. Szögsebesség bemenőjel mérése esetében a mechanikai oldalon előírt a forrás, és ennek értéke van „rákényszerítve” a két párhuzamos elemre. Így ezekre nem kell, és nem is lehet egyenletet felírni. A villamos oldalon az induktivitás a tachogenerátor esetében sokkal kisebb, mint a motornál, így ezt már végképp nem szükséges a modellbe bevonni.
A tachogenerátor a kefés egyenirányítás miatt pulzáló fél-szinusz hullámokat szolgáltat. A jel frekvenciája és amplitúdója a fordulatszámtól függ. A tachogenerátor jelét aktív, vagy passzív villamos kapcsolással szokták „simítani”. A legegyszerűbb egy megfelelően méretezett, ellenállásból és kondenzátorból álló aluáteresztő szűrő.
6.4. Merülő tekercses lineáris motor konstrukciója. Váltó a gyakorlatban.
A lineáris motorok között speciális helyet foglal el. Mielőtt megvizsgáljuk a lineáris motorok egy kiválasztott típusát, érdemes röviden áttekinteni a motoroknak (aktuátoroknak) e családját is.
Lényegében három típust lehet megkülönböztetni:
Elektrodinamikus (merülőtekercses)
Szinkron
Aszinkron
Az első típust kis teljesítményigény, rövid lökethossz és általánosságban kisméretű szerkezetek esetében alkalmazzák. A CD és DVD fejeken kívül lényegében ilyen szerkezet található a hangszórókban és az elektrodinamikus mikrofonokban is.
A szinkron és aszinkron lineáris motorokat a szerszámgépiparban és az elektronikai gyártóberendezésekben alkalmazzák. Kis méretekben ezekkel nem lehet találkozni.
Érdemes áttekinteni előnyeiket és hátrányaikat is, hiszen joggal merül fel a kérdés, miért kell forgó motorokat, hajtóműveket és mozgásátalakítókat tartalmazó, bonyolult rendszereket építeni pozicionálási célra, ha egyszer az egyenes vonalú direkt hajtás rendelkezésre áll?
|
Előnyök |
Hátrányok |
|---|---|
|
Nagy gyorsítási képesség (10 g-ig) |
Rossz hatásfok, a veszteségi teljesítmény miatt jelentős hőforrás a rendszerben |
|
Nagy pozicionálási pontosság (szabályozással 0.1-1 μm) |
Erőt módosító áttétre nincs lehetőség, mindent a motor határoz meg |
|
Típustól függően légcsapágyazás és mágneses lebegtetés lehetséges |
Bizonyos típusoknál az erős mágneses tér miatt jelentős a szánra és a vezetékre ható erő |
|
Igény szerinti mozgatási hossz |
Pozícióban tartáshoz energia szükséges |
|
Nagy előtoló erő (20 kN-ig) |
Aszinkron változatnál pozícióban tartásnál nagy hőterhelés |
|
Nincs mozgásátalakító |
Terheléstől függő dinamika |
|
Nagy mozgatási sebesség (100 m/s –ig) |
Ferromágneses anyagok megmunkálásánál gond van a forgáccsal |
Egy jelentős gyártó által készített összehasonlító táblázaton láthatjuk a további szempontokat, amelyek mérlegelésével érthetővé válik az, hogy miért nem vált egyeduralkodóvá a piacon a lineáris motorok családja.
|
Hajtás jellemzői |
Fogazott szíj |
Golyósorsó |
Lineáris motor |
|---|---|---|---|
|
Mozgatási hossz |
10 m-ig |
2 m-ig |
10 m-ig |
|
Mozgatás sebessége |
5…10 m/s |
3…5 m/s |
…100 m/s |
|
Gyorsítás |
100 m/s2 |
50 m/s2 |
100 m/s2 |
|
Pozicionálás |
10 μm |
2 μm |
1 μm |
|
Merevség |
közepes |
nagy |
nagy |
|
Ár |
alacsony |
magas |
magas-nagyon magas |
A fejezetben példaként, a merülő tekercses lineáris motort fogjuk elemezni.
A CD és DVD eszközök optikai rendszerének fókuszáló lencséjét merülő tekercses lineáris motor mozgatja. Az eszköz jellegzetesen mechatronikai, sőt optomechatronikai, különlegessége a méreteiben és a megkívánt pozicionálási pontosságban van. Ezen túlmenően olyan példája az elektromechanikus váltónak, amelynél jól tanulmányozható, hogy melyek egy eltérő típusú rendszert összekapcsoló átalakító szerves részét képező passzív elemek. Azok az elemek, amelyek nélkül a rendszer működésképtelenné válna. A villamos elemek megléte magától értetődő, hiszen tekercs és mágneses mező nélkül nincs átalakító. Azonban a mechanikai oldal sem érdektelen. A tekercs és az optika a foglalattal együtt természetesen a tömeg, de a kettős célú rugalmas konstrukció nélkül nincsen sem pozíciótartás, sem egyenes vezetés. Ha ugyanis ezt a rugós vezetéket elhagynánk, a tekercs árama által létrehozott erő vagy kilökné, vagy ütközésig behúzná a foglalatot. A mikrométer törtrészére is lehetséges pozíciót a rugófeszítés által keletkező ellenerő biztosítja, hiszen a foglalat azt a pillanatnyi pozíciót veszi fel, amelynél az adott áram által létrehozott Lorentz erővel (elektromágneses erő) a rugóerő egyensúlyt tart. A finommechanikában jól ismert, hogy a felületi érdesség és egyéb technológiai korlátok miatt a mikrométer tartományban, de főként az alatt, kizárólag deformációs elven működő vezetékeket lehet alkalmazni, csúszó és gördülő vezetékek ilyen célra nem használhatók. Legalábbis a tudomány és technika jelen állása szerint.
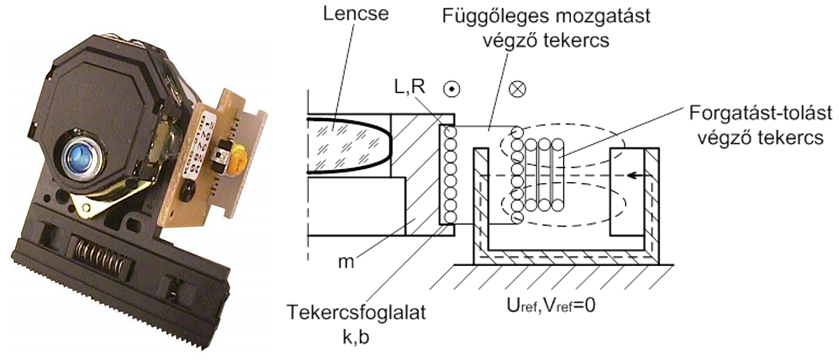
A fenti fotón egy híradástechnikai CD fej látható összeszerelt állapotban, jobboldalon pedig a modellezést lehetővé tevő szerkezeti vázlat félnézet-félmetszet szerű rajz (magyarázó ábra, nem egzakt műszaki rajz) formájában azzal, hogy rugalmas vezeték éppen nem látható, mert az a rajz síkjára merőleges. Egyszerűbb CD és DVD szerkezetekben négy db kör keresztmetszetű, rugóbronzból készült huzaldarab képezi a vezetéket, amelyeknek egyik vége a kerethez, a másik pedig a foglalathoz van rögzítve. Igényesebb kialakításokban speciálisan kiképzett csuklópontokkal rendelkező, kettős műanyag vezeték (négycsuklós mechanizmus) található.
A következő képen egy ilyen komplex kialakítású, rugalmas egyenes vezeték felülnézeti fotóját látjuk. A bemutatott vezeték valójában négycsuklós mechanizmus, a négy csapágyazás helyén rugalmas csuklókkal – ezért ezt a szerkezetet is rugalmas vezeték egy speciális formájának tekintjük. A vezeték monolitikus (egy darabból készült) és lényegében két párhuzamos, merev műanyag lemezből áll, a rugalmas csapágyazásokat az anyag elvékonyításával, és speciális, hornyos kialakításával hozták létre. Ez a vezeték nem csak függőleges mozgást, hanem bizonyos mértékű oldalirányú elmozdulást és szögben történő elfordítást is lehetővé tesz. A kép baloldalán a rugós vezeték befogása, míg a jobboldalon a lencsefoglalat egy kicsiny része látszik. A kör alakú jelölés „1”-es számmal jelzi azokat a csuklópontokat, amelyek a lencsefoglalat oldalirányú pozicionálását és szögben való elfordítását biztosítják. A méhsejt formával kijelölt, és „2”-es számmal jelzett csuklók a párhuzamos rugós vezeték függőleges mozgását teszik lehetővé.
A rugalmas vezetéken kívül jól kivehetőek további szerkezeti elemek is, így például a szimmetrikusan elhelyezett, két lineáris motor „fő” tekercsei, amelyek a lencse függőleges pozicionálását teszik lehetővé. A nagy tekercsek közepén a mágneskör „vas” része látható, az „U”-alak egyik szára, felülről. A permanens mágnes az U-forma belső oldalára van ragasztva, ez a fotón már nem látszik, de a fenti szerkezeti ábrán bemutattuk. A nagy tekercsek külső oldalán két-két további, kisebb tekercset is találunk, ezekkel a lencsefoglalat oldalirányú elmozdítását és szögben való elfordítását lehet biztosítani.
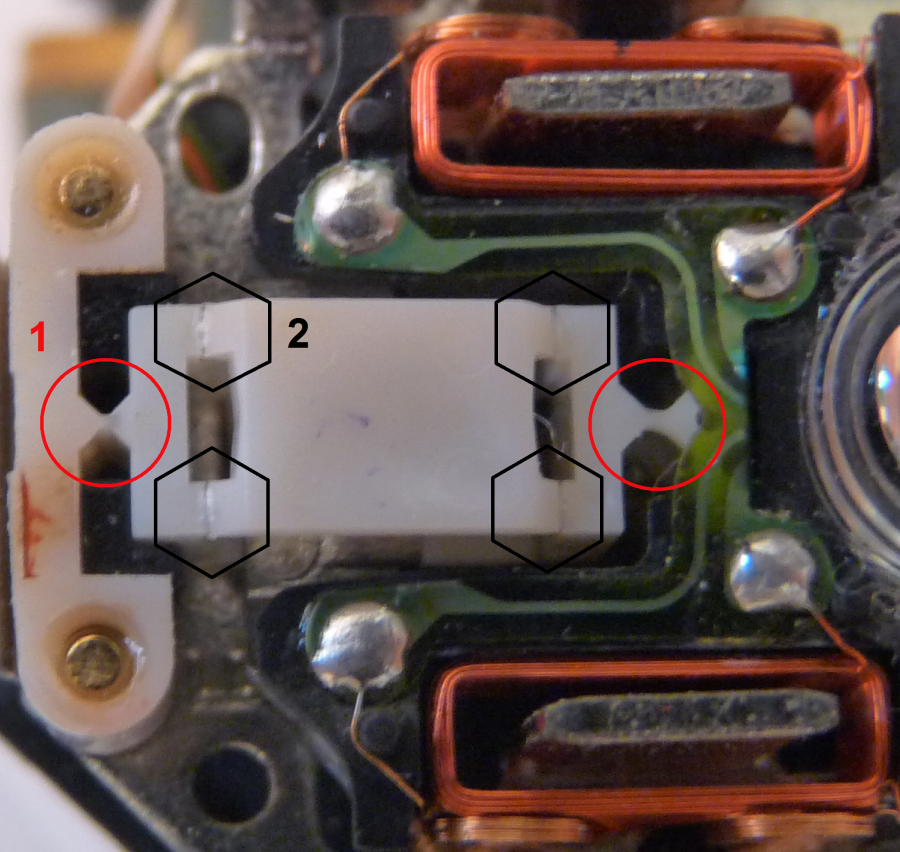
(„1” elfordulás, „2” függőleges mozgás)
A rugalmas kettős vezeték működésének jobb érthetősége miatt a két következő kép a rugós vezeték két szélső pozícióját mutatják be. A baloldali képen az alsó ütközési helyzet látható, és figyelmes szemlélő nem csak az egyik lemezt, hanem a kép alján a párhuzamos, második lemez csuklópontjait is fel tudja ismerni. A jobboldali képen a vezeték felső ütközési pozíciója van bemutatva.
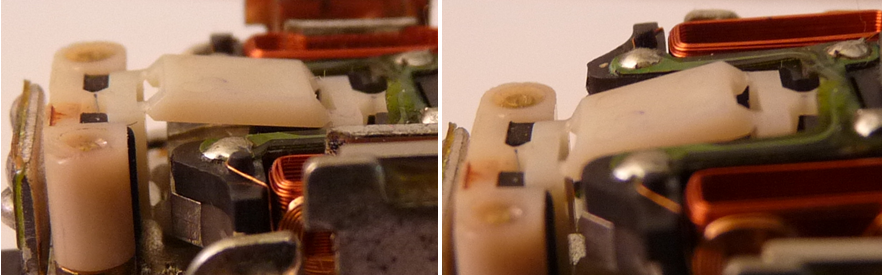
A működési vázlat alapján megszerkesztett gráf erősen emlékeztet a DC motor gráfjára. A villamos oldal azonos, ott a tekercs ellenállása és a nyugalmi induktivitása alkotják a hurok passzív elemeit, a mechanikai oldalon egyenes vonalú mozgást végző elemeket láthatunk. A rugalmas vezeték „k” rugómerevsége, és a deformációból eredő belső súrlódási veszteséget modellező „b” csillapítási tényezője (veszteséges rugó, Kelvin modell) valamint az eredő tömeg található. A mechanikai oldalon forrás nincsen.
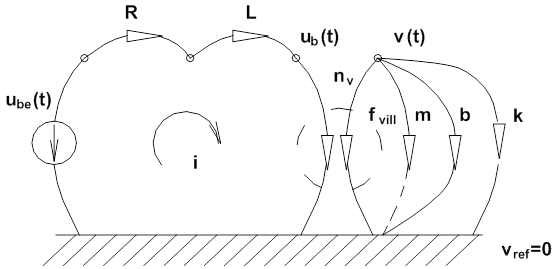
Keresett a hagyományos szabályozókör megtervezéséhez szükséges X(s)/Ube(s)=G(s) átviteli függvény. Ilyen esetben legcélszerűbb, ha impedancia módszert alkalmazunk. A következő ábrákon először az impedancia hálózat, majd a kimeneti változónak alárendelt összevonások eredményeként kapott kapcsolás látható. Mechanikai keresztváltozó keresett, ezért a villamos oldal impedanciáit átszámítjuk mechanikai egyenértékű impedanciákká, és felrajzoljuk a keresztváltozó osztót. A feladatot ennél egyszerűbb kapcsolással nem lehet megoldani.
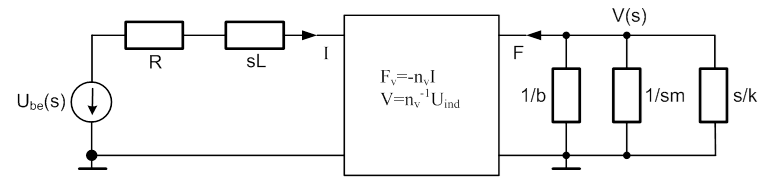
A korábbi példáknál bemutatott módon összevonjuk a villamos oldal impedanciáit, majd a mechanikaim oldalra számítjuk át az eredőt, hiszen mechanikai változó a keresett.
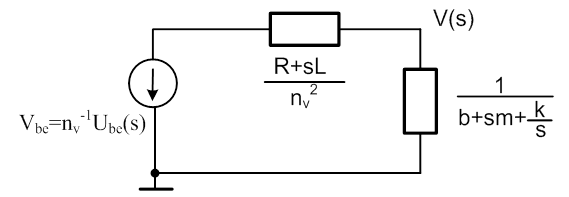
Az egyszerűsített kapcsolás alapján, feszültségosztó formájában felírjuk az átviteli függvényt:
|
|
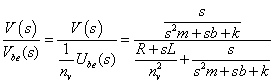
A kijelölt műveletek elvégzése a következő feladat:
|
|

Végül a szakasz átviteli függvénye már nem tartalmaz deriváló jelleget, tekintettel arra, hogy az optikai foglalatnak nem a sebessége, hanem a pozíciója a szabályozott jel. A sebességre felírt átviteli függvényt tehát be kell szorozzuk 1/s kifejezéssel:
|
|

Az átviteli függvényben szándékosan elkülönítettük a mechanikai és a villamos időállandókat, valamint a mechanikai rész csillapítatlan rezonancia frekvenciájával összefüggő tagot:
|
|

Az operátor első hatványához tartozó együttható harmadik tagja jellegzetesen mechatronikai, hiszen ez egy vegyes időállandó. A redukció alapján a nv2/k=Lk kifejezés nem más, mint a mechanikai rugómerevséggel egyenértékű induktivitás. Így valójában egy Lk/R elektromechanikus időállandóval van dolgunk.
Az általunk eddig megvizsgált híradástechnikai CD fejek mindegyikének mechanikai rezonancia frekvenciája a 17 Hz<ω0 <30 Hz tartományban volt található. A szabályozókör tervezése szempontjából ezt a szakaszt mindenképpen másodrendűnek célszerű tekinteni, hiszen az L/R időállandó elhanyagolhatóan kicsi a mechanikai rész időállandójához viszonyítva. A szakasz dinamikai szimulációját bemutatjuk a 15. fejezet elején. Szimulációval és méréssel győződtünk meg arról, hogy a szabályozás szempontjából „éppen” a motor induktivitása lesz elhanyagolható. Érdekességként említjük, hogy van olyan munka, amelyben a szerző nem vesz tudomást a domináns jellegű mechanikai építőelemekről, munkájában olyan villamos kapcsolás látható, amelyen a lineáris motorból kizárólag a tekercs induktivitása van feltüntetve. Éppen az az elem, amely a dinamikus viselkedésben nem játszik szerepet: Claus Biaesch-Wiebke CD-Player und R-DAT-Recorder [6.3.]. Ilyen alapról indulva természetesen nem lehet megfelelő szabályozókört méretezni. Az idézett munka célja nem is ez volt, hanem a CD-DVD fejek felépítésének és működésének bemutatása, bár a teljeséghez mechatronikai szemlélet esetében az elektrodinamikus váltó, és a mechanikai építőelemek is hozzátartoznak.
Szakirodalom
[6.1.] Elektromechanische Systeme Bd. 2. Verlag Technik. Berlin . 1975.
[6.2.] Önműködő szabályozott rendszerek. Műszaki Könyvkiadó. Budapest . 1979.
[6.3.] CD-Player und R-DAT-Recorder. Vogel Verlag. Würzburg . 1988.
7. fejezet - Hajtómű dinamikai modelljei, a mechanikai időállandó kérdése
A mozgásátalakítók között „előkelő” helyet foglal el ez a transzformátor jellegű energia-átalakító. Kis fáradsággal a gyártók honlapjairól és a katalógusokból kideríthető, hogy a DC motorok optimális üzeme 3200…5000 ford/perc tartományában található, és az is, hogy ezen aktuátorok névleges forgatónyomatéka igen csekély. Így tehát ezen aktuátor család gyakorlati alkalmazása elképzelhetetlen hajtómű csatlakoztatása nélkül. A módosítások, szükség esetén, elérhetik akár az i=10 000 értéket is. Ha az általános gyakorlat nem is ez, de jellemző az i=1000 körüli módosítás.
Kisebb hajtóművek esetében szükségtelen a hajtómű különálló dinamikai modellezése, az esetek többségében a DC motort és a vele egybeépített hajtóművet egy közös elsőrendű átviteli tagként modellezzük. Kifutási mérésekkel bárki meggyőződhet arról, hogy a DC motor elektromechanikus időállandója (a nyugalmi induktivitás nélkül a motor szintén elsőrendű tag) önmagában nagyobb, mint a hajtóművel egybeépített motoré. A különbség általában nem számottevő, de méréssel kimutatható. A következő diagram egy 5 V-os DC mikromotor önállóan, valamint i=124 módosítással rendelkező hajtómű (és a golyósorsós pozicionáló asztal) csatlakoztatása után felvett „kifutási” görbéit mutatja. Ebből számunkra jelenleg kettő lényeges, a terheletlen és a hajtóművel egybeépített motoré.
Az ábra függőleges tengelyén a motorral egybeépített tachogenerátor kapocsfeszültsége látható, miután a tápfeszültséget lekapcsoltuk. A tacho-jel aluláteresztő szűrőn lett átbocsátva, így a jel nagysága a fordulatszámmal arányos. A vízszintes tengely az időtengely.
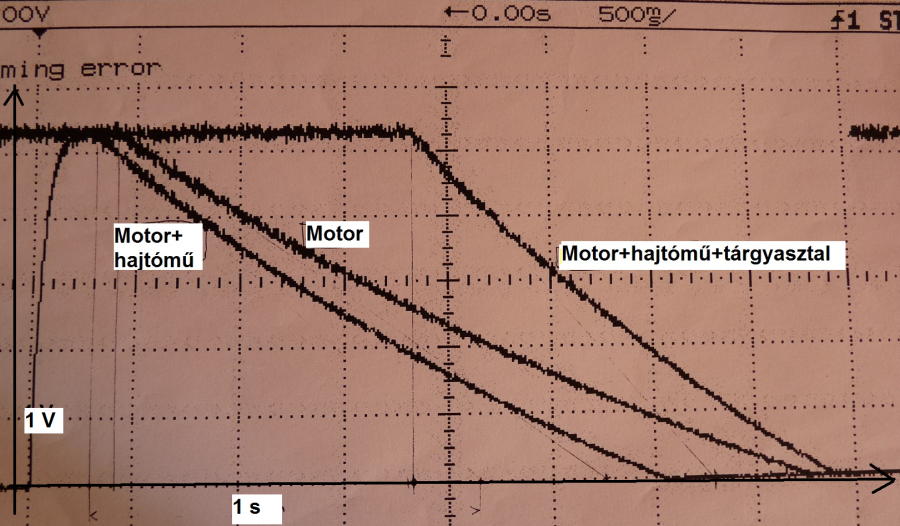
A kifutási görbe felvétele a finommechanika jellegzetes mérési módszere egy hajtómű súrlódásának vizsgálatára. A kifutási vizsgálat modelljét, amelyre a vizsgálat alapul, az (1.3. szakasz) fejezetben mutatjuk be. A mérés során a motort, vagy hajtóművet névleges fordulatszámra gyorsítjuk, majd egy t=t0 kezdeti időpillanatban a gerjesztést kikapcsoljuk, és a rendszert szabadon hagyjuk kifutni. Ez tulajdonképpen a „homogén megoldás” technikai változata. Azért technikai, mert nem a t(0+) „kezdeti érték”, hanem a t(0-) „kiindulási érték” áll rendelkezésre. A vizsgált esetben a két érték azonos, tehát jogos a homogén megoldás megnevezés.
Mit jelent a DC motor „nagyobb” üresjárati, és „kisebb” hajtóművel kombinált időállandója? Nos, semmi esetre sem azt, hogy pusztán az időállandó nagysága alapján bárki elhamarkodott véleményt mondhatna egy mechanikai rendszer dinamikájáról. Az időállandó önmagában nem elegendő egy elsőrendű mechanikai rendszer minősítéséhez. Az időállandót az átviteli függvény arányos együtthatójával, tehát az átviteli függvény számlálójával együtt szabad csak vizsgálni. Hajtóművel kapcsolt motorunk kisebb időállandója egyből „elveszti” jelentőségét, ha az (1.3. szakasz) fejezetben látható módon vizsgálni kezdjük az átmeneti függvényt és a Bode diagramot. A részletes modellezést ezen a helyen nem ismételjük meg, de a könnyebb megértés kedvéért álljon itt az átmeneti függvényeket bemutató diagram:
Ugyanakkora gerjesztő forgatónyomaték hatására a kisebb időállandójú, hajtóművel egybeépített motor lényegesen alacsonyabb szögsebességre (fordulatszámra) gyorsítható, mint a terheletlen, de nagyobb időállandójú motor. E helyen is megismételjük, hogy a kifutás vizsgálat modellje nem analógiája a villamos, passzív RC-tag aluláteresztő szűrőnek! A mechanikai rendszerben a két modell-elem párhuzamos kapcsolású, és a mechanikai időállandóban (T=J/B, T=m/b) a csapágy- és vezeték-súrlódással összefüggő csillapítási tényező (B,b) nem ellenállás, hanem vezetőképesség jellegű. Azaz, minél kisebb a csillapítási tényező értéke, a súrlódási viszonyait tekintve annál jobb, és nagyobb időállandójú és kisebb veszteségű a mechanikai rendszer.
Ez csak első pillanatban tűnhet modellezési szempontból különösnek, mert az egybeépített motor-hajtómű egységnél, a megnövekedett tehetetlenségi nyomaték miatt, esetleg mást várnánk. Alaposabban elemezve a szerkezetet, be kell látnunk, hogy az eredő tehetetlenségi nyomaték ugyan valóban nő, de sokkal nagyobb arányban nő a súrlódási veszteségek szerepe. A finommechanikai ismeretekkel rendelkezők jól ismerik azt a szabályt, hogy kisméretű és miniatűr konstrukciós mérettartományban nem a tömegerők, hanem a súrlódó erők dominálnak. Így van ez a DC mikromotorok esetében is.
A modellezéssel foglalkozó tananyag azonban nem mellőzheti azt, hogy a robottechnikában, pozicionáló rendszerekben szokásos méreteken túl, más mechatronikai feladatok esetében szükség lehet a hajtómű dinamikai sajátosságainak figyelembe vételére is.
A hajtómű dinamikai modelljében három paraméter-csoportot szoktak figyelembe venni. Két csoportot képez a bemeneti, valamint a kimeneti oldal eredő (jellemző) tehetetlenségi nyomatéka és súrlódási nyomatéka, a harmadik az eredő rugómerevség, amely a tengelyek és a fogak rugalmasságait foglalja magába. Kísérleti úton is vizsgálható ez a rugómerevség, ha a hajtómű kimenetét mechanikailag „rövidre zárják”, azaz a házhoz rögzítik a kimenő tengelyt, és a bemenetet fokozatosan növekvő forgatónyomatékkal terhelik. A tehetetlenségi nyomatékok közül rendszerint a domináns értékekkel számolnak, ezek a nagyobb átmérőjű fogaskerekekhez köthetők.
A hajtóművek veszteségeit a szakirodalom öt pontban szokta összefoglalni:
Fogsúrlódási veszteségek
Csapágyazások veszteségei
Kenőanyag keverési veszteség
Légkeverési veszteség
Tömítés-súrlódási veszteségek
Ezek közül kétség kívül az első kettő játssza a legnagyobb szerepet, és szakirodalmi tapasztalatok szerint átlagos esetben (átlagos terhelés, kenési viszonyok, homlokkerekes konstrukció) a fogsúrlódási veszteség és a csapágysúrlódási veszteség összemérhető mértékű.
Az itt bemutatatott valós hajtómű egyszerűsített gráfjában szereplő B1 és B2 csillapítási tényezők a fogsúrlódást és a csapágysúrlódásokat együttesen fogják modellezni. Első pillanatban az összevonás különösnek tűnhet, de szigorúan ragaszkodva a hazai és a nemzetközi szakirodalomban bemutatott számításokhoz bemutatjuk, hogy az összevonás megalapozott. Érdekesség, hogy a mechatronikai tervezéssel foglalkozó művekben, a hajtóművekkel foglalkozó fejezetekben, nem említik külön a fogsúrlódást, ezekben csak a csapágysúrlódás modellezését találjuk meg. A fogsúrlódás különálló modellezése csak elvétve, és közvetetten található meg, így például Bögelsack [7.1.], és Isermann [7.2.] munkájában. A fizikai jelenségek részletes tárgyalása helyett a hajtómű hatásfokával számolnak.
Az átlagos fogsúrlódási tényező meghatározása összetett feladat. A súrlódás nagymértékben függ a konstrukciótól (belső, külső fogazás, hajtómű típus, stb.), fogak anyagától, a felületi minőségtől, a terheléstől, és a kenési állapottól.
A soron következő három ábrát Keresztes R. Zs. [7.3.] disszertációjából vettük át azért, hogy a fogsúrlódás mérésével kapcsolatos kutatásokat illusztrálni tudjuk.
Az első ábrán Benedict és Kelley [7.4.] által összeállított mérőrendszer vázlata látható.
Az elrendezés a pillanatnyi fogsúrlódás mérését tette lehetővé, dinamikus jelenségek vizsgálatára nem volt alkalmas.
A következő négy ábra Keresztes R. Zs. [7.3.] és Csobán Attila PhD disszertációjából [7.6.] származik, és nagyon jól alátámasztják az általunk javasolt gráf modell helyességét.
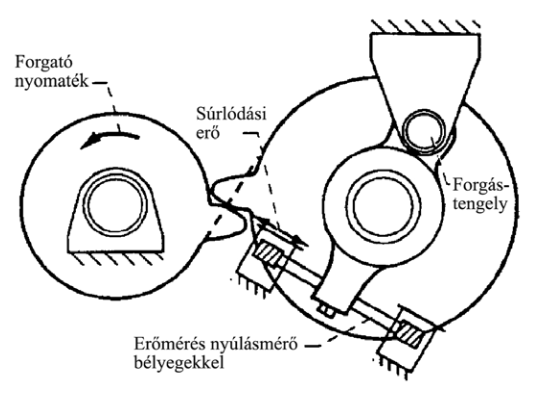
A dinamikus fogterhelés mérésére Rebbechi [7.5.] nyúlásmérő bélyeges erőmérést alkalmazott. A mérési elrendezést bemutató ábrán látható a nyúlásmérő bélyegek elrendezése a fogtő-lekerekítéseknél, a 30°-os érintő irányában.
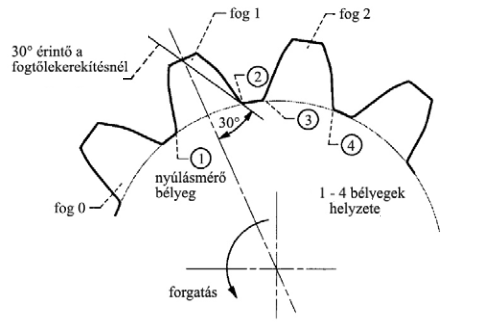
A kalibrálás során a normál és tangenciális erőkomponenseket szétválasztották. A dinamikus normál irányú erőt és a fogsúrlódási erőt különböző nyomatékokkal, szögsebességekkel és terhelésekkel kapott mérési eredményekből számították ki. Példaként, a kapott eredmények illusztrálására, következő ábrán 800/min fordulatszámon és 71,1 Nm terhelő nyomaték mellett kapott dinamikus erőértékeket látjuk.
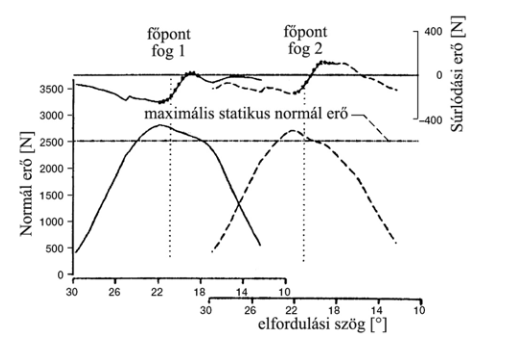
A legfrissebb, témával foglalkozó, hazai tudományos munkák közül Csobán Attila PhD disszertációját [7.6.] azért emeljük ki, mert az általa feldolgozott szakirodalom mennyisége tiszteletet érdemlő. A dolgozat irodalomjegyzésében 38(!) forrásmunka foglalkozik a fogsúrlódás elméleti és kísérleti meghatározásával.
A fogsúrlódás témájával PhD disszertációjában ugyancsak átfogóan foglalkozott a már említett munkájában Keresztes R. Zs. [7.3.] is. A dolgoztában több fogsúrlódási számítási módot mutat be, ezek között idézi a Shell cég által közölt tapasztalati képletet is:
|
|

ahol
|
μ |
Fogsúrlódási tényező | |
|
η [mm2/s] |
Kinematikai viszkozitás | |
|
r [mm] |
Kapcsolódó fogaskerekek egyenértékű sugara a főpontban | |
|
vt [m/s] |
Tangenciális sebességek összege a főpontban |
A szakirodalom tanulmányozása során megállapíthatjuk, hogy sokan és sokféle módon kísérelték meg a fogsúrlódási tényező előzetes becslését, hiszen ez a hajtómű tervezéséhez elengedhetetlenül fontos. Ez a jegyzet nem vállalkozhat arra, hogy a problémát teljes mélységében bemutassa, szerepe csak annyi, hogy felhívja a figyelmet azokra a tényezőkre, amelyek a pontos modellezést nehezítik.
Még egy, a tervezői körökben ismert számítási módot bemutatunk, azért, hogy a probléma összetettségét érzékeltethessük. A fent bemutatott számításhoz képest a Niemann [7.7.] által javasolt formula kisebb súlyt helyez a kinematikai viszkozitási tényezőre, de megjelenik benne az üzemtényező (KA), a kerületi erő (F), a fogak szélessége (b), a kiskerék gördülőkörének átmérője (dw1) és az átlagos felületi érdesség (Ra) is. A többi jelölés az előző képletben is megtalálható:
|
|
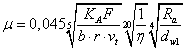
A Shell-féle és a Niemann-féle képlet - többek mellett - mindkét fent említett disszertációban is szerepel.
A műszaki műanyag és acél fogaskerék párosítás tribológiai viszonyaival foglalkozó munkában [7.3.] olvashatjuk, hogy az evolvens fogfelületeken keletkező vs csúszási sebesség az érintőlegesen fellépő vt1 és vt2 sebességek különbsége:
|
|

A következő ábrán az idézett szerző által definiált a geometriai viszonyok láthatóak, a tangenciális sebességek meghatározásához:
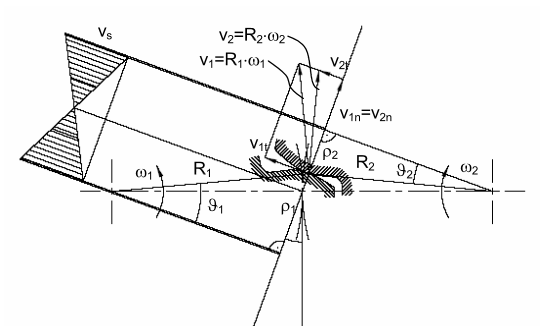
Keresztes szerint az érintőleges sebességek a geometria alapján az alábbiak szerint számíthatóak:
|
|
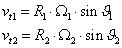
Az összefüggések átalakíthatóak az érintkező evolvensek ρ1 és ρ2 görbületi sugarainak felhasználásával:
|
|

És a fentiekkel:
|
|

Ez a két összefüggés már alkalmas a struktúra gráfban való megjelenítésre. A csúszási sebesség is meghatározható:
|
|
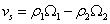
Tekintettel arra, hogy a csúszási sebesség felületek között egyenes vonalú mozgás formájában lép fel, a struktúra gráfban a fogaskerekek szögsebessége mellett, szükség van két olyan váltó jellegű átalakítóra, amelyek a két tangenciális sebességet előállítják. A gráfban mindkét tangenciális sebesség egy-egy csillapítási tényező egyik csomópontjaként jelenik meg, a másik csomópont mindkettőnél a referencia.
A hajtóműből „kicsatolt” legfontosabb veszteségi teljesítmények (csapágyazás, fogsúrlódás) így ábrázolhatóak a legegyszerűbben.
A gráf továbbá arra is lehetőséget ad, hogy a referenciára vonatkoztatott tangenciális sebességek (vt1 és vt2) különbségével a fogsúrlódási erőt kifejezhessük:
|
|

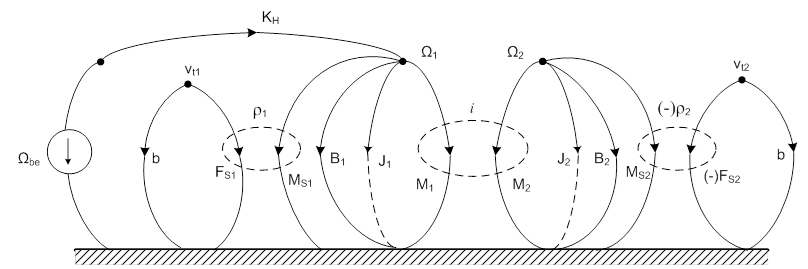
A gráf jobbszélén látható transzformátor negatív előjel jelzi, hogy a fogsúrlódási erő a két tangenciális sebesség különbségével függ össze. Ugyanakkor az előjelet zárójelbe tettük, mert ezzel szeretnénk érzékeltetni, hogy a tervezés fázisában jobb nagyobb veszteséget becsülni, és ezért az egyszerűsített gráfban ezt az előjelet nem vesszük figyelembe. A csapágysúrlódási veszteségek a gyártók adatai alapján becsült értékek, és mérés nélkül előzetesen csak nagyságrendjük becsülhető. Vannak a hajtóművekben további veszteségek is, amelyeket a gráfban nem tüntettünk fel. Tehát, figyelembe véve, hogy a szakirodalomban fellelhető mérési eredmények egyöntetűen jelzik a fogsúrlódási és a csapágyazási veszteségek összemérhetőségét, célszerű élni a gráf által felkínált egyszerűsítési lehetőséggel.
Az impedancia módszernél bemutatott eljárással átszámítjuk a fogsúrlódással kapcsolatos csillapítási tényezőt a csapágysúrlódásokhoz:
|
|
Az átszámítás révén a párhuzamos csillapítási tényezők összeadódnak, és a gráf leegyszerűsödik.
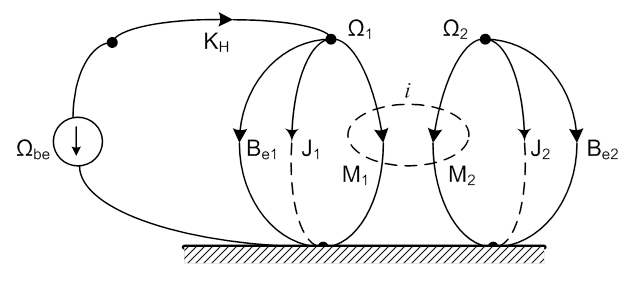
A további számításokban, amikor például a hajtóművet a DC-motorhoz kapcsoljuk, a csillapítási tényezők jelölésénél az eredőre utaló „e” betűt nem alkalmazzuk, minden esetben feltételezzük, hogy a hajtómű két legfontosabb súrlódásos vesztesége a forgó csillapítási tényező segítségével, összevontan modellezhető.
A részletes bemutatás célja az volt, hogy a hajtóműben lejátszódó dinamikai jelenségek jobban követhetővé váljanak.
A rendszer forrása keresztváltozó (fordulatszám, szögsebesség), amint az DC motorok és léptetőmotorok esetében, az összekapcsolás révén, érthető is. Ha a forrás forgatónyomaték lenne, akkor a forrással sorba kapcsolt rugómerevség szerepe megszűnne, ezen az előírt forrásérték „áthalad”, és nem szükséges csomóponti egyenlet a hajtómű kimeneti szögsebességének felírásához sem, hiszen az átviteli függvény ebben az esetben impedancia módszerrel egy egyszerű fizikai egyenlettel adódik (általános Ohm törvény).
A rendszer keresztváltozó forrás esetében másodrendű, mert a rugómerevség mellett nem két tehetetlenségi nyomaték, hanem egy eredő lesz a mértékadó. Azért eredő, mert Ω1 és Ω2 változók nem függetlenek egymástól. A referencia közös, a két érték pedig az „i” módosítás révén összefügg. A dinamikai modell szempontjából Ω1 érdektelen, ezért mind a most bemutatásra kerülő csomóponti módszernél, mind pedig a később ismertetett impedancia módszer esetében elimináljuk.
7.1. Hajtómű modell csomóponti módszerrel, ideális hajtómű, „redukció”
A csomóponti módszert azért alkalmazzuk, mert Ωbe és Ω2 keresztváltozók között keresett a matematikai kapcsolat. A fentiek alapján a két csomópont valójában egy, de első lépésben külön-külön kezeljük őket. Legyenek a csomópontokból kifelé mutató gráf élek előjelei pozitívak:
|
|
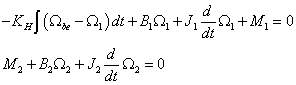
A két csomóponti egyenlet egymásba fűzhető, ha társítjuk hozzájuk a transzformátor két nélkülözhetetlen egyenletét is. Ezek, mint tudjuk, az „ideális” hajtómű egyenletei. Ideális azért, mert semmilyen paramétert (energiatárolás, súrlódás) nem veszünk figyelembe, az átalakítás veszteségmentes:
|
|
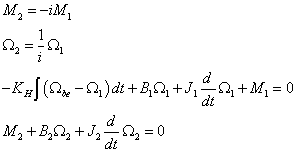
Egymásba helyettesítés után az alábbi egyenletet kapjuk:
|
|

Laplace transzformáljuk a behelyettesítés után kapott egyenletet, és a változók szerint rendezzük:
|
|

Rendezés, és az operátorral való szorzás után kapjuk az alábbi alakot:
|
|

Végül az operátortól független taggal való osztást követően kapjuk a másodrendű rendszer egy lehetséges matematikai modelljét, az átviteli függvényt:
|
|
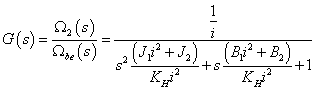
Az átviteli függvény nevezőjében jellegzetes tagokat látunk. A gráf baloldalán szereplő, és a kiiktatott változóhoz tartozó együtthatók rendre i2 szorzóval jelennek meg. Ezt redukciónak nevezi néhány, a hajtómű témával foglalkozó irodalom, ami azt jelenti, hogy a hajtómű kimeneti paramétereihez a bemeneti oldali paraméterei nem közvetlenül, hanem csak a transzformátor-állandó négyzetével súlyozottan adhatók hozzá. A redukciót (és az eddig bemutatott modellt) csak kotyogásmentes hajtások esetén lehet alkalmazni, különben az egyes részeket külön-külön kell vizsgálni „free-body” diagramjaik alapján. Fontos ezen a helyen megjegyezni, hogy amennyiben a bemeneti oldalra „redukáljuk” a kimenetit, akkor viszont a kimeneti oldal kell paramétereit (1/i)2 súlyzótényezővel kell figyelembe venni a bemeneti oldalon. Ez utóbbi eset fordul elő akkor, ha a hajtó motor „szemszögéből” vizsgáljuk azt, hogy mekkora eredő tehetetlenségi nyomatékot kell figyelembe venni a gyorsításnál. Erre a számításra látunk a későbbiekben példát is, amikor a golyósorsós finompozicionáló tervezését mutatjuk be.
Az átviteli függvény arról tanúskodik, hogy a hajtómű, rezgésre hajlamos, csillapított másodrendű rendszer.
7.2. Hajtómű modell meghatározása impedancia módszerrel
A gráf struktúrája szinte „kínálja” az impedancia módszerrel való műveleteket, a kapcsolást lényegesen egyszerűsítő összevonásokat. Az impedancia módszer „rajzos”, egyszerűsítő eljárás, amelynek célja a kimenő változóhoz illeszkedő „osztó” kapcsolás előállítása. Esetünkben keresztváltozó a kimenőjel, tehát keresztváltozó osztót kell létrehoznunk. A redukció során kevesebb elemet kell átszámolni, ha a kimeneti oldal egyenértékeit keressük a bemeneti oldalon. A keresett változó természetesen nem Ω1, hanem Ω2, de ez nem jelent gondot, mert közöttük a módosítás teremt kapcsolatot.
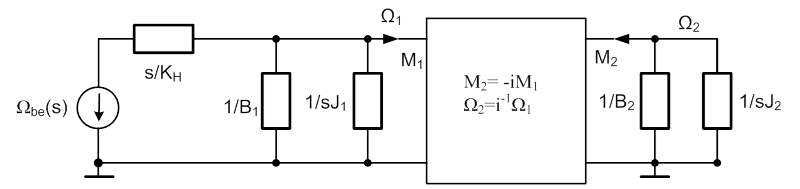
A redukció és az összevonások után az alábbi egyszerű keresztváltozó osztót kapjuk. A csillapítások és a tehetetlenségi nyomatékok eredő impedanciáit természetesen ugyancsak össze kell vonnunk, és az osztó egyben az átviteli függvény implicit formája lesz:
|
|
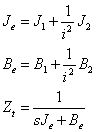
A keresett átviteli függvény tehát a legegyszerűbb felírási módszerrel:
|
|
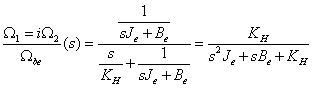
A végső forma - némi átalakítás után - az alábbi lesz:
|
|
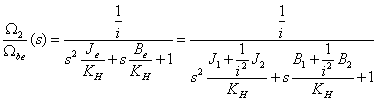
Vegyük észre, hogy ez az átviteli függvény megegyezik a csomóponti módszerrel kiszámított matematikai modellel. Ha ugyanis a nevezőben azoknál a tört együtthatóknál, amelyekhez a Laplace operátor kapcsolódik, a számlálót és a nevezőt is beszorozzuk i2-tel, akkor a már korábban látott alakhoz jutunk.
|
|
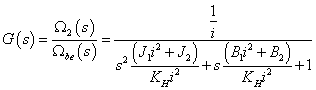
A példában szándékosan redukáltunk először a kimeneti, majd az impedancia módszernél a bemeneti oldalra, hogy didaktikai szempontból meggyőző legyen az olvasó számára a redukció eredménye mindkét irányban.
7.3. Kotyogásos hajtómű nemlineáris modellje
A hajtómű, és más forgó mechanikai rendszerek kotyogásainak (holtjátékának, irányváltási hibájának) modellezésére többféle változat létezik, egy lehetséges formát tárgyal az E. Kallenbach és G. Bögelsack szerzőpáros a Gerätetechnische Antriebe című munkában [7.1.]. Egy, az idézett műben található modell módosított változatát mutatjuk be a következő ábrán. A szemléletesség kedvéért a leíró függvény erősen torzított, a kotyogás aránytalanul fel van nagyítva.
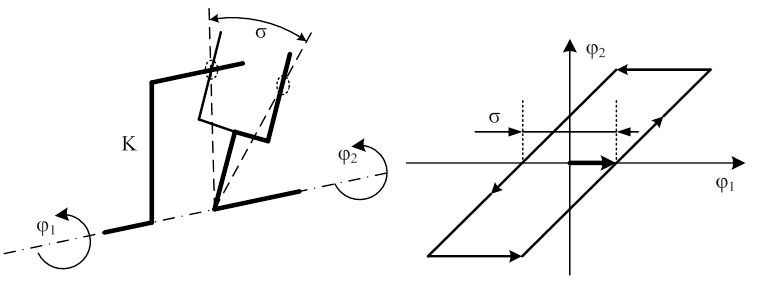
Hasonló modellel dolgozik D. Strobl [7.8.], aki nemlineáris mechatronikai rendszerek (építőelemek) szimulációját és szabályozását neurális hálóval és megfigyelővel végezte el, valamint M.J. Reiner [7.9.] is, a rugalmas és nemlineáris robotstruktúrákkal foglalkozó munkájában.
Forgó mozgás esetére, például hajtóművek kotyogásának modellezésére mindhárom, előbb idézett munkában találhatunk példákat.
A modellben a bemeneti oldalon φ1, a kimenetin φ2 szög látható. A kotyogás szögét, amely a foghézagok eredőjét testesíti meg, σ jelöli. A modell magyarázó ábráján két hajtókart látunk, amelyek közül az egyik villás kiképzésű. A bemeneti hajtókar forgástengelyre vonatkoztatott felütközési pontjai között található a kotyogás (holtjáték) szöge. A jelenséget leíró függvény egy lehetséges változata az ábra mellett, jobbra látható. A kiindulási pontot a holtjáték közepére tettük. A modellben feltételezhetünk egy „K” torziós tengelyrugalmasságot is.
Reiner [7.9.] disszertációjában a következő modellt találhatjuk:
|
|
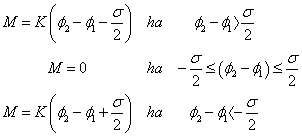
A kotyogás leírását némiképp eltérő megfogalmazását látjuk a [7.1.] munkában:
|
|
Pozicionáló rendszerek esetében a tervezők mindent elkövetnek, hogy a holtjátékot kiküszöböljék, hiszen ez a nemlinearitás gondot okozhat a szabályozás tervezése során.
A probléma megoldása régóta ismert, a kotyogásmentes hajtómű formájában. Ebben található egy olyan osztott fogaskerék, amelyeknek fogai torziós rugóval vannak egymáshoz képest szögben megfeszítve. A holtjátékot golyósorsós mozgás-átalakító esetében kettős anya közötti rugós feszítéssel szűntetik meg. Az előfeszítés egyik esetben sem lehet akkora, hogy a kopást lényegesen megnövelje. A gyártók a várható terhelés függvényében történő előfeszítés mértékére irányértékeket szoktak adni.
Szakirodalom
[7.1.] Gerätetechnische Antriebe. Verlag Technik GmbH. Berlin . 1991.
[7.2.] Mechatronische Systeme. Springer Verlag. Berlin . 1999.
[7.3.] Műszaki műanyag/acél csúszópárok tribológiai kutatása PhD Disszertáció. SzIE. 2009.
[7.4.] Instantaneous Coefficients of Gear Tooth Friction. ASLE Transactions. PP 59-70.. 1961.
[7.5.] Measurement of Gear Tooth Dynamic Friction NASA Technical Memorandum 107279. Army Research Lab.. 1996.
[7.6.] Bolygóművek hő-teherbírásának meghatározása PhD Disszertáció. BME. 2011.
[7.7.] Maschinenelemente Bd. II. Springer Verlag. Berlin . 1989.
[7.8.] Identifikation nichtlinearer mechatronischer Systeme mittels neuronaler Beobachter. Herbert Utz verlag. München . 1999.
[7.9.] Modellierung und Steuerung von strukturelastischen Robotern. PhD Dissertation. TU München . 2010.
8. fejezet - DC motor hajtóművel egybeépített modelljei
A gráf alapján könnyen nyomon követhető, hogy a tervezés során, az előírt paraméterek és jellemzők figyelembe vételével több esetet lehet megkülönböztetni. Ezek tárgyalásának nehézségi foka igen eltérő. Egy különleges motor-hajtómű konstrukciót láthatunk P. K. Budig munkájában [8.1.]. Röviden összefoglaljuk a jellegzetes variációkat, de nézzük kiindulásként a gráfot:
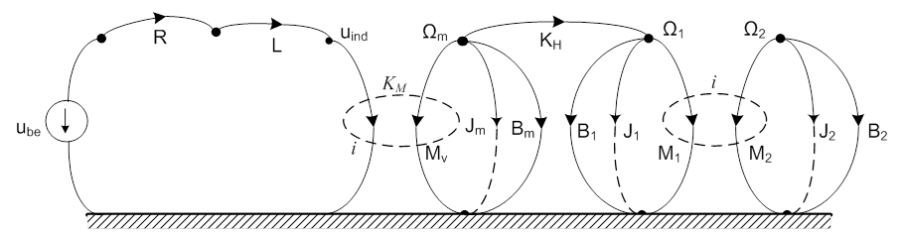
A gráfon felismerhető a DC motor gráfja, és az Ωm motortengely szögsebesség a hajtómű bemeneti szögsebessége. A két rendszer nem választható szét, ez példaképpen azt jelenti, hogy a hajtómű minden paramétere befolyásolja az armatúra áram pillanatnyi értékét is. A teljes gráf negyedrendű rendszert mutat, a független energiatárolók: L, Jm, és KH. A hajtómű kimeneti J1 és bemeneti J2 oldali tehetetlenségi nyomatékai függő tárolók, ezek egynek számítanak, de csak redukcióval vonhatóak össze.
Minden változatnál az impedancia módszert alkalmazzuk, mert egyrészt ez segíti az összehasonlítást, másrészt az átviteli függvényhez ennek a módszernek a segítségével juthatunk el a leggyorsabban.
8.1. Visszahatás nélküli hajtómű
Az alcím azt hangsúlyozza, hogy a motorral egybeépített hajtómű módosítása akkora, hogy a hajtómű kimenete felől a rendszer nem hozható mozgásba. Az ehhez szükséges módosítás több tényezőtől függ, de általánosságban i>500 értéktől felfelé ez a feltétel teljesül. Extrém példaként a csigahajtóművet szokás emlegetni, ennek esetében kizárt a visszahatás. A külföldi szakirodalomban találunk olyan formát, amelyben ezeket az eseteket úgy írják le a modellekben, hogy a transzformátor típusú átalakító után „diódát” kapcsolnak [7.1.]. Az „önzáró” (selbstsperrend) hajtómű teljesítmény-folyamának irányát a hatásfok segítségével szimulálják. A motor felől a terhelés irányában ηe=0.9…0.95, visszafelé irányban pedig ηv=0.
Ha a motor-hajtómű egység visszahatásmentesnek tekinthető, akkor ez igen leegyszerűsíti a szabályozott szakaszok méretezését. A motor-hajtómű egység, mint G1(s) átviteli tag, sorba van kapcsolva az utána következő terheléssel, vagy mozgásátalakítóval, legyen ezek átviteli függvénye G2(s).
Az eredőjük természetesen:
|
|

A G1(s) átviteli tag tehát a motor-hajtómű egység, ennek kimenete az Ω2 szögsebesség, Ube(s) bemenet hatására. A fenti egyenletet a továbbiakban úgy kell értelmezni, mintha a G2(s) átviteli tag bemenete egy ideális keresztváltozó forrás lenne, amely a visszahatás-mentes hajtómű kimenő szögsebessége. Ezt a szögsebességet a fejezetben bemutatott példákban következetesen Ω2-vel jelöltük. A hangsúly a visszahatás-mentességen van. Ha a hajtómű nem visszahatás-mentes, akkor a Gsz(s) átviteli tagot nem lehet két soros tagra bontani. Ilyen esetet modellezünk a 8.2. szakasz fejezetben.
Az ideális forrás fogalmát szó szerint kell venni ebben az esetben is. Az 1. fejezet fejezetben leírtuk, hogy az ideális forrás megtartja előírt értékét (itt szögsebesség) minden releváns (ésszerű) terhelésre, és a szükséges átmenő változót a megadott teljesítménykorlátok között (itt forgatónyomaték) szolgáltatja.
A visszahatás-mentesség tehát nem azt jelenti, hogy a motor-hajtómű egység korlátlanul terhelhető!
Ha kész G2(s) modellje (ez általában egy mozgásástalakító), akkor a paraméterek és a szabályozással szemben támasztott dinamikai követelmények (beállási idő, gyorsítási idő, stb.) ismeretében meg kell határozni a motorral szemben támasztott teljesítmény-igényt, és a hajtómű nyomaték-terhelhetőségét. Ezt részletesen bemutatjuk a 11. fejezet fejezetben.
Az adott szögsebesség tartományban a „kivehető” forgatónyomaték nem korlátlan. A visszahatás mentesség csak a stacionárius terhelés körüli tartományban teljesül.
Mit kell a visszahatás-mentes hajtómű esetében „ésszerű” terhelés alatt érteni. Az 1. fejezet fejezetben már jeleztük, hogy az ideális források többsége igen bonyolult szerkezet. Így van ez a motor-hajtómű egységgel is. A „kivehető” teljesítmény nyílván nem lehet nagyobb, mint a villamos oldalon (motor bemenetén) betáplált teljesítmény. A teljesítmény önmagában még nem elegendő, ezen túlmenően a döntő fontosságú, hogy a hajtómű elemeit meghatározott forgatónyomaték átvitelére méretezik, ezen belül különösen a fogaskerekek fogméreteire kell koncentrálni, mint „gyenge” láncszemre.
Végezzünk el egy gondolati kísérletet. Próbáljuk meg „kivenni” a hajtóműből a maximális forgatónyomatékot. Ez a kimenet mechanikai „rövidzárását” jelentené, azaz a kimenő tengelyt „lefogjuk”, rögzítjük. A szögsebesség, mint keresztváltozó, értéke minimális szintre, azaz zérusra csökken. (Analógiaként képzeljük el, mi történik, ha egy akkumulátor, mint keresztváltozó forrás sarkait rövidre zárjuk.) A motor rövid ideig még szolgáltatja a hajtómű bemenő nyomatékát, de a motor-hajtómű egység a leggyengébb láncszemnél fog tönkremenni, ott, ahol a kis forgatónyomaték miatt még relatív kis fogméretek és tengelyátmérők vannak.
A kísérletet természetesen nem maradt meg a „gondolat” szintjén. A fejezet szerzője munkatársaival mechatronikai (robot) hajtáshoz alkalmazott motor-hajtómű egységeken (un. „mikromotorok”) terheléses kísérleteket végzett. A túlterhelt hajtóművek leggyengébb láncszeme általában a második fokozat műanyag fogaskereke volt. Az specifikációban megadott stacionárius nyomatékot (állandó terhelő nyomatékot) meghaladó terhelés hatására a műanyag fogaskerék fogait a következő fokozat acél fogazata szabályosan „legyalulta”.
Mindezek meggondolása azért fontos, mert a 11. fejezet és 12. fejezet fejezetekben (golyósorsós és fogazott szíjas mozgásátalakítók, mint szakaszok méretezése) bemutatjuk, hogy a motor és hajtómű statikus és dinamikus terhelhetőségét, az előírt dinamikai követelmények figyelembevételével tervezni kell. Olyan motor-hajtómű egységet kell kiválasztani, amely a szükséges teljesítményt, dinamikát stb. szolgáltatni képes.
A mechatronikai tervezés első lépése „arról szól” tehát, hogy a modellezett szakaszban meg kell határoznunk a motor-hajtómű egység felé támasztott követelményeket, ezért szenteltük külön ennek a fázisnak a 11.1. szakasz fejezetet.
Ha a módosítás nem elegendően nagy, tehát a motor-hajtómű egység nem visszahatás mentes, akkor a teljes rendszert (szabályozott szakaszt) együtt szabad csak modellezni, mert a rendszer forrásától legtávolabb lévő elem is befolyásolja visszahatás formájában a forrás melletti elemek változóit. Ezt az esetet is bemutatjuk, a 8.2. szakasz fejezetben, ahol a motor, a hajtómű és a golyósorsós átalakító egyetlen átviteli tagot képeznek, amely legegyszerűbb formájában is hatodrendű.
A motor villamos időállandója (L/R) lényegesen (nagyságrendekkel) kisebb, mint a rendszer többi időállandójának értéke, ami kisebb motoroknál az induktivitás viszonylag kis értéke miatt fordul elő. Kisebb méretű pozicionáló rendszerek esetében a hajtómű rugómerevsége a tengelykapcsoló rugómerevségéhez viszonyítva nagy, a modellezésnél KH→∞ érték gond nélkül felvehető. Ennek a feltételezésnek természetesen határt szabhat a pozícionálási pontosság előírt követelménye. A módosítás kellően nagy a szétválaszthatósághoz, ezért a motor és hajtómű egység együttesen egy egytárolós arányos tagot képez, amelyhez sorosan kapcsolódik az a tag, amely lehet egy golyósorsós pozícionáló, vagy egy másfajta lineáris/rotációs rendszer.
A motor időállandója kicsi, de nem lehet figyelmen kívül hagyni a hajtómű KH rugómerevségét. A hajtómű módosítása nagy, tehát a szakasz ugyancsak két részre választható szét. Ebben az esetben a motor-hajtómű egység harmadrendű arányos átviteli tag, amelyhez további tag, vagy tagok csatlakozhatnak.
A motor időállandóját a rendszer többi időállandójához képest nem lehet figyelmen kívül hagyni, modellezni kell a KH hajtómű rugómerevséget, a módosítás viszont biztosítja a szétválaszthatóságot. Ebben az esetben az első tag (motor és hajtómű egység) már negyedrendű arányos tag lesz.
A bevezető rendszerezés után bemutatjuk a három változat modelljének levezetését.
8.1.1. Általános változat (egytárolós)
L→0; K H →∞; i»1 (visszahatás-mentes), a leggyakrabban alkalmazott modell
Az első a legegyszerűbb, és ezt a modellt szokás általában alkalmazni pozícionáló rendszerek esetében. A modell finomítása mindenképpen állapotteres tárgyalást tesz szükségessé. A súrlódások (csillapítások) nemlineáris függvényeinek figyelembe vételét, esetleg a rugómerevségek függvényeit, de mindenképpen fontos a mozgatott tömeg, valamint az előtoló erő értékének változását modellezni. Ebben az esetben csak az állapotszabályozás valamilyen válfaja jöhet szóba.
Az első modellben az 1. pontban leírtak szerint legyen L→0, KH→∞, és i»1. A következő ábra a motor és a kapcsolt hajtómű impedancia modelljét mutatja. A paraméterek nagysága miatti egyszerűsítést lépésenként mutatjuk be a könnyebb érthetőség kedvéért. Az átviteli függvényeket keressük, mert a hagyományos szabályozókör tervezéséhez ez az adekvát modell. A szakasz szétválasztása a hajtómű kimeneténél történik, ezt a gráfon is ellenőrizni lehet. A golyósorsós mozgatás forrása a hajtómű Ω2 kimeneti változója lesz.

Első lépésben egyszerűsítjük az impedancia hálózatot, a tervezési feltételek alapján.
Elhagyjuk az „sL” és az „s/KH” impedanciákat. A villamos oldal impedanciáit egyenértékű forgó mechanikai impedanciákká számoljuk át, és átszámítjuk az Ube forrást Ωbe forrássá. A két átalakító közötti impedanciák így párhuzamosakká válnak, és egyszerűen összevonhatók. A hajtómű kimeneti oldalát redukáljuk a bemenetire, és az átviteli függvény ezért először nem Ω2-re, hanem Ω1-re írjuk fel. Ez nem jelent gondot, mert a két változó között a módosítás teremt kapcsolatot. Nézzük, hogy a leírt módosításokat elvégezve, miként egyszerűsödik a kapcsolás:
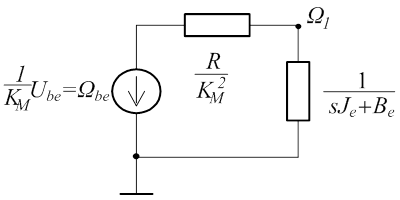
A szakasz első tagjának átviteli függvénye tehát direktben felírható, csak a keresztváltozó osztót kell alkalmazni. Úgy gondoljuk, hogy a képen látható kapcsolás egyszerűségéhez nem férhet kétség.
A villamos forrás és impedancia átszámítás eredménye az ábrán látható. A mechanikai oldalon végrehajtott redukció és a párhuzamos impedanciák összevonása eredményeként adódó terhelő impedancia kiszámítása nem fér az ábrára, ezt az alábbiakban mutatjuk meg. A számítást egyszerűsíti, hogy minden elem párhuzamos, ezért a vezetőképességek összeadhatók. Az eredő impedancia az admittanciák összegének reciproka lesz. Tudjuk, hogy a tehetetlenségi nyomaték admittanciája „sJ” és a csillapításé „B”. Az összevonás eredménye van feltüntetve a kapcsoláson.
|
| ||
|
|

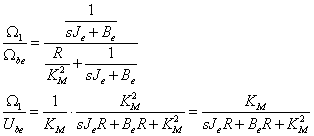
Az átviteli függvényt a szokásos alakra hozzuk azzal, hogy a nevező operátortól független tagjával osztjuk a tört mindkét részét. Eredményül egy egytárolós arányos tagot kaptunk, amelynél különösen fontos, hogy levezettük, a motor és hajtómű egység mely paramétereire van szükség, és azokat milyen súlyozással kell figyelembe venni a tervezésnél. Az utolsó lépésben behelyettesítjük a hajtómű kimeneti szögsebességét.
|
|
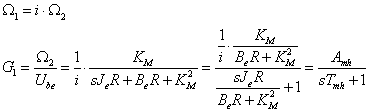
A fenti összefüggésben az „mh” index a motor-hajtómű egységre utal, és az Amh arányos tényezőben a módosítás már benne foglaltatik.
8.1.2. Háromtárolós változat
L→0; i»1 (visszahatás mentes), a hajtómű rugómerevségével számolni kell
Ebben az esetben is az első modellnél felvázolt impedancia kapcsolásból kell kiindulnunk, amelyben a motor hajtómű egység minden impedanciája megvan. Ezt a kapcsolást nem ismételjük meg, de azt a következő ábrán már megmutatjuk, hogy miként változik a kapcsolás, ha az induktivitást elhagyjuk:

A szemléletesség kedvéért második lépésben redukáljuk a hajtómű kimenő oldalán szereplő impedanciákat a bemeneti oldalra, miközben nem feledjük, hogy számunkra nem Ω1, hanem Ω2 lesz a valódi kimenet.
A következő ábrán már azt a hálózatot látjuk, amelyen a hajtómű kimeneti oldalának impedanciáit a bemenetire számoltuk át, és elvégeztük az összevonást is.
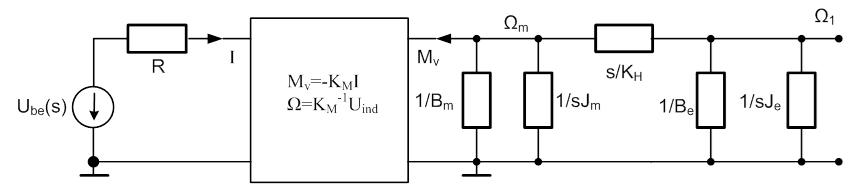
Az összevonások következő lépéseként a villamos oldal impedanciáját számítjuk át forgó mechanikaivá és kiszámítjuk az új keresztváltozó forrást is:
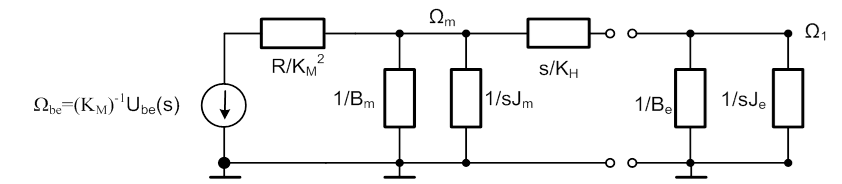
A fent látható kapcsolás még tovább egyszerűsíthető, hiszen a referenciához kötött impedanciák összevonhatók:
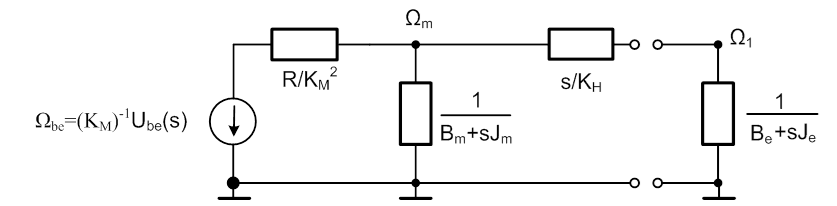
A végeredményben kapott kapcsolás tovább már nem alakítható. Látható, hogy a keresett változóhoz tartozó impedanciát (passzív rész) már leválasztottuk az aktív részről. Keresztváltozó a bemenet és a kimenet is, ezért olyan alakra alakítjuk a kapcsolást, amely egy keresztváltozó osztó, és ez egyben az átviteli függvény is, implicit formában:
|
|

Most már csupán a Zb belső impedanciát és az aktív rész új ΩF forrását kell meghatározni.
Az ΩF forrás nem azonos az Ωbe forrással, hanem az aktív rész un. üresjárati, terheletlen keresztváltozó kimenete a kapcsokon. Látható, hogy terheletlen esetben a KH torziós rugómerevségre nem hat csavaró nyomaték, deformáció nincs, az impedancia elhagyható. A keresett ΩF forrás pedig egy keresztváltozó osztó révén egyből felírható:
|
|
A Zb belső impedancia kiszámítása kicsit hosszadalmasabb feladat. Az aktív rész szabad kapcsai felől kell a rendszerbe „belenézni” és megállapítani, hogy „mit lát” a terhelő rész.
|
|

Továbblépés előtt érdemes dimenzió ellenőrzést végrehajtani, hiszen a képlet már eléggé bonyolult. Miután meggyőződtünk, hogy azonos dimenziójú tagokat adunk össze, felírhatjuk a keresett implicit átviteli függvényt:
|
|
A legtöbb hasonló kapcsolás esetében „némiképp” egyszerűsödik az explicit átviteli függvény, azaz, ha ΩF forrás helyére behelyettesítjük az eredeti forrást:
|
|

Célszerű a nevező operátortól független tagjával a számlálót és nevezőt osztani, mert a dimenzió ellenőrzés is könnyebben végrehajtható.
|
|

A könnyebb kezelhetőség érdekében érdemes az átviteli függvény szokásos jelöléseit alkalmazni. Ezen kívül az Ω1 kimenet helyére behelyettesítjük a hajtómű módosításának figyelembe vételével a valóban keresett mennyiséget, Ω2 szögsebességet, valamint Ωbe helyére az eredeti bemenő jelet, a DC motor kapocsfeszültségét osztva a KM motorállandóval.
Ez az átszámítás a harmadik impedancia kapcsoláson látható:
|
| ||
|
|


Befejezésül az átviteli függvény még tömörebb formáját adjuk meg, az együtthatók értékei a levezetésből világosan látszanak:
|
|
Az eredmény várható volt, hiszen 3 db független energia tárolót kellett figyelembe venni (Jm, KH és Je).
Az átviteli függvény nevezőjének együtthatói:
|
| ||
|
| ||
|
|
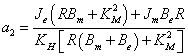
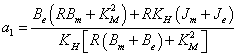
8.1.3. Négytárolós változat
Figyelembe kell venni L és K H paramétereket, i»1 (visszahatás-mentes)
Ebben a változatban a G1(s) átviteli függvény modelljének felírásához már mindenképpen ajánlatos számítógépes modellező programot alkalmazni. A G2(s) átviteli függvény természetesen változatlan, de mert G1(s) már egy negyedrendű rendszert ír le, a „kézi” számolás sok vesződséggel jár, és könnyen lehet hibázni is. A következőkben azért mutatjuk be mégis a hagyományos úton való levezetést, mert az előzőekhez képest egy olyan eljárást szemléltetünk, amely bonyolultabb kapcsolás esetén is megkönnyítheti a számításokat.
A kiindulás természetesen a motor-hajtómű rendszer, immáron minden fontos energiatároló figyelembe vételével. A következő ábrán már a célszerűen átalakított kapcsolást látjuk. A villamos rendszerrészt forgó mechanikaivá számítottuk át, és redukáltuk a hajtómű kimeneti oldalát a bemenetire. Adott esetben ennél kompaktabb formát nem lehet elérni.
Összetettebb hálózatok esetében a számítás jelentősen egyszerűsíthető, ha csupán a végeredménybe helyettesítjük be a konkrét paramétereket. Ugyanakkor láttuk egyszerűbb feladatoknál, pl. a DC motor modelljénél, hogy egyszerűbb esetben ez nem jelent különösebb segítséget. További előny, ha nem csupán impedanciákkal, hanem admittanciákkal is számolunk.
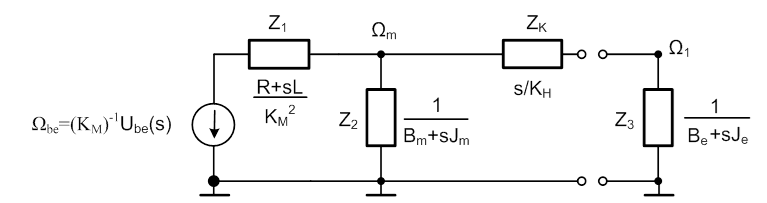
Keresett tehát az Ω1/Ube átviteli függvény, amelyhez ismét aktív és passzív részre bontunk, majd felírjuk a keresztváltozó osztót, ami közvetlenül a megoldáshoz vezet. A passzív rész változatlan, az aktív rész új forrás értéke (üresjárati keresztváltozó) az Ωm csomóponton jelenik meg, hiszen a torziós tengelyen nincsen elcsavarodás.
|
|
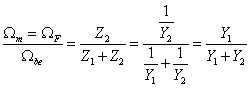
A kimenetre felírható osztó pedig az alábbi:
|
|
A keresett átviteli függvény a fentiekkel a következő, viszonylag egyszerű implicit alakot veszi fel:
|
|
Az átviteli függvényben azért szerepelnek az admittanciák, mert az impedanciák többsége tört, és ezért így egyszerűbb a számolás. A belső impedanciát az aktív rész szabad kapcsai felől írjuk fel:
|
|

Behelyettesítve az Yb –re kapott összefüggést, az átviteli függvényben már csak az önálló impedancia/admittancia értékek szerepelnek. Azonnal látható az ajánlott módszer előnye, az egyszerűsítések lehetősége:
|
|

Végül
|
|

A részletszámításokat érdemes külön elvégezni:
|
|

A figyelmes olvasó azonnal felismeri az összefüggés reciprokában azt a kifejezést, amely a DC motor fordulatszáma, mint kimenet és a terhelő nyomaték, mint bemenet közötti átviteli függvény.
|
| ||
|
|

A következő lépésben az átviteli függvény nevezőjével külön foglalkozunk, mert a kifejezés összetett, és törekedni kell a legegyszerűbb formára:
|
| ||
|
|


Közös nevezőre hozás után nem szabad elfelejteni (gyakori hiba), hogy a „D” (denominator) nevezője a majdani átviteli függvény számlálójának szorzó tényezője lesz, mert meg kell szüntetni az emeletes törtet.
A további számítási lépéseket nem mutatjuk be, csupán azt, hogy a végső formában törekedtünk arra, hogy a szabályozástechnikában megszokott átviteli függvény alakhoz jussunk. Az operátortól független együtthatóval osztottuk az átviteli függvény számlálóját és nevezőjét is.
A számláló Y1 az alábbi értékű, ha hozzávesszük a tört előtti állandót is, nem szabad elfeledkeznünk, hogy a nevező közös nevezőre való hozásánál volt egy szorzat, amely a számlálóba (N: nominator) kerül:
|
| ||
|
|


Ha az így kapott „N” –et osztjuk a nevező operátortól független együtthatójával, az alábbi eredményt kapjuk:
|
|

Ez a kifejezés a keresett átviteli függvény számlálójának végső formája, és mint ilyen, „ismerős” a korábbi változatokból. Az átviteli függvény az alábbi lesz:
|
|

Egyszerűbb a kifejezés, ha a csillapítási tényezőket összevonjuk:
|
|
A nevező együtthatóinak értékeit közöljük, hogy a dimenzió ellenőrzés lehetséges legyen:
|
| ||
|
| ||
|
| ||
|
| ||
|
|


8.2. DC motor és hajtómű visszahatással, pl. i<500, és golyósorsós átalakítóval
Lehetséges olyan változat is, amelyben a hajtómű módosítása nem teszi lehetővé a szétválasztást, mert a hajtómű kimeneti tengelye felől a rendszer motor felőli oldala mozgásba hozható. Ilyen esetben a teljes szakaszt egyetlen átviteli tagként lehet csak modellezni. A hajtómű a rendszer-részeket nem választja szét, a mozgás átalakító visszahat a rendszer elejére. A fejezetcímben látható módosítás-határ csak tájékoztató jellegű. Homlokkerekes hajtóművek esetében, például i~500 körüli módosításoknál még tapasztalható a visszahatás. A visszahatás hajtómű típusától, a kenési viszonyoktól és több más tényezőtől is függ.
Ebben az esetben a legnagyobb a számítási munka. Lényegileg mindegy, hogy hány átmenő változó energiatárolót (rugalmasság, induktivitás) veszünk figyelembe, az átviteli függvény egyetlen tömb lesz, a rendszám a független energiatárolóktól függ.
Legegyszerűbb esetben is hatodrendű rendszert kapunk, az átviteli függvény paraméterei igen összetettek lesznek.
A rendszer gráfja a (8.9. ábra) ábrán látható. A motor-hajtómű egységhez tengelykapcsolón keresztül golyósorsós mozgásátalakítót csatlakoztatunk. A mozgásátalakító impedancia modelljének levezetését a 11. fejezet fejezetben, és az alább alkalmazott formáját a 11.3. ábra és 11.4. ábra ábrákon találjuk.

Ebben az esetben mindenképpen célszerű olyan szimulációs programot felhasználni a matematikai modell felírásához, amely a rendszer impedancia hálózatán, vagy az elemek egymáshoz való kapcsolódásán alapul, és amelyik ebből kiindulva számítja ki az átviteli függvényt. Ilyen szimulációs programot mutat be például az M. Otter által jegyzett munka [8.2.]. Nagyméretű hálózat esetében a „papíron” történő levezetés hosszadalmas, és kétséges lehet az eredmény is. A dimenzió ellenőrzés ilyen esetben különösen fontos.
Ezt a változatot bemutatás céljából a terjedelmessége miatt nem vezetjük végig, hanem a Maxima nevű programot alkalmazzuk az átviteli függvény meghatározására.
A GNU GPL licenc által szabályozott hozzáférésű Maxima (http://maxima.sourceforge.net/) számítógépes algebra rendszerrel számoljuk a katalógusadatok alapján az átviteli függvény együtthatóit. A Maxima rendszer hivatalos dokumentációja [8.3.] mellett az interneten igen sok oktatóanyag és mintapélda található. A COMA (COntrol engineering with MAxima) szabályozástechnikai számításokat megkönnyítő kiegészítő [8.4.] angol és német leírása mellett mintapéldákat is letölthetünk.
Először a 8.9. ábra alapján nagyon vázlatos impedanciahálózatot veszünk fel és számoljuk a kitüntetett pontokhoz tartozó jellemző eredő impedanciákat és keresztváltozó értékeket. A (8.10. ábra) ábrán az eredeti Ube(s) keresztváltozó forrás (feszültségforrás), a hajtómű Ω2(s) szögsebessége és a Vki(s) sebesség szerepel Laplace-operátoros tartományban. Az egyes impedanciák index szerint:
a villamos rész impedanciája
a motor tehetelenségéből és a veszteségből származó (párhuzamos) eredő impedancia
a hajtómű rugómerevségéből származó impedancia
a hajtómű fogaskerekeihez és csapágyazásaihoz kapcsolódó (párhuzamos) eredő impedancia
a golyósorsós mozgásátalakító rugalmasságából származó impedancia
a golyósorsós mozgásátalakító tömegből és veszteségből származó (párhuzamos) eredő impedanciája
A DC motor és a golyósorsós mozgásátalakító váltó, a hajtómű transzformátor típusú energiaátalakító. Mindkét típus azonos jellegű változók közötti kapcsolatot ad meg, vagyis keresztváltozót keresztváltozóval, átmenő változót átmenő változóval kapcsol össze az energiaátalakító állandója segítségével.
A részletes számításban a fejezetben korábban szereplő módszerrel a villamos oldal impedanciáit egyenértékű forgó mechanikai impedanciákká számoljuk át, és átszámítjuk az Ube feszültségforrást Ωbe szögsebesség forrássá. A későbbiekben (11.2. ábra) szereplő redukcióval vesszük figyelembe a hajtómű i módosításának hatását a tőle „balra” lévő részrendszerekre és a most már szögsebesség forrásra. Ugyanitt találjuk a golyósorsós mozgásátalakító váltóegyenleteivel felírható redukciós összefüggéseket, így a haladó mozgásra vonatkozó impedanciákat forgó mozgásra vonatkoztatva írjuk fel. Ezek az átalakítások nem változtatják az impedanciák jellegét, igen leegyszerűseítve valamennyi állandóval való szorzásként kezelhető.
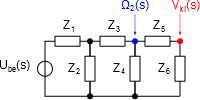
Számításainkban a load("coma")$ paranccsal betöltött COMA csomag impedance_chain(Z1, Z2, Z3, Z4, …) parancsát használjuk az impedancia lánc eredőjének számítására.
teljes_halozat: a Vki és Ube közötti, mind a hat összetevőt tartalmazó impedancialánc (8.10. ábra)
hajto_resz: az Ω2 és Ube közötti, négy összetevőt tartalmazó impedancialánc (8.11. ábra)
hajtott_resz: a Vki és Ω2 keresztváltozók közötti impedancialánc, tulajdonképpen keresztváltozó osztó (8.11. ábra)
visszahatassal: a golyósorsós mozgásátalakító visszahatását figyelembe vevő modellben a teljes rendszert viszonyítjuk a hajtott rendszerhez (impedanciáik hányadosát képezzük)
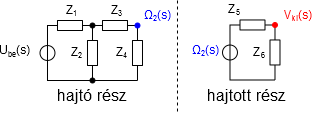
A teljes hálózat, a hajtó és hajtott rész, valamint a visszahatást figyelembe vevő eredő impedanciák paraméteres meghatározása wxMaxima programmal és a COMA csomaggal:
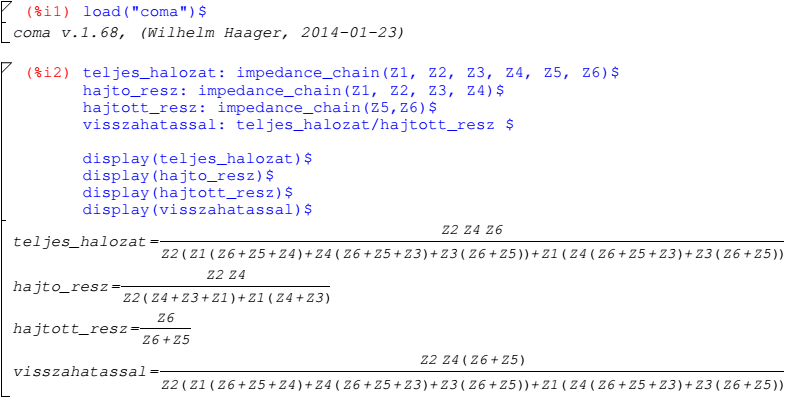
Az egyes impedanciák összetevőik szerint, a képletekben szereplő s-hatványoknak megfelelő együtthatókkal. Az átviteli függvények szokásos megadásához hasonlóan a számlálóbeli együtthatókat b-vel, a nevezőbelieket a-val jelöljük. Az indexek két tagúak, az első szám utal az impedancia sorszámára, a második pedig az s-hatvány kitevőjére. Az energiaátalakítókból származó konstansok az egyes impedanciák fázismódosító jellegét nem változtatják.
a villamos rész sorba kapcsolt ellenállás és induktivitás eredője
a motor tehetelenségét és a veszteséget párhuzamos eredővel számoljuk
a hajtómű rugómerevségéből származó impedancia
a hajtómű soros eredőként kezelt tehetetlenségeiből és szintén soros eredőként figyelembevett csapágyazásaiból számolt eredők párhuzamos kapcsolásából számolt impedancia
a golyósorsós mozgásátalakító rugalmasságából származó impedancia
a golyósorsós mozgásátalakító párhuzamosan kapcsolt tömegéből és veszteségéből származó eredő impedancia
Az egyes impedanciák összetevőknek megfelelő Laplace-operátoros tartománybeli megadása általános együtthatókkal a wxMaxima programban:
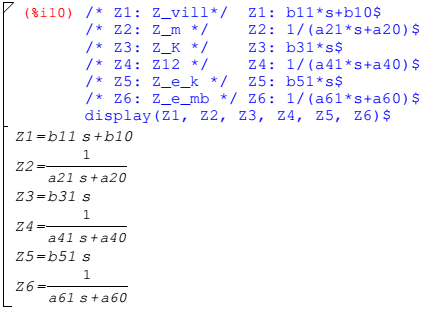
Az általános számláló és nevező polinommal adott impedanciákkal számolunk és az eredményeket G átviteli függvényként kezelve a COMA csomag tranftype(G) parancsával kiíratjuk a jelátvivő tagként kezelt modell típusát.
A teljes hálózat, a hajtó és hajtott rész, valamint a visszahatást figyelembe vevő eredő meghatározása a hat polinomként adott impedianciával wxMaxima programmal és a COMA csomaggal:
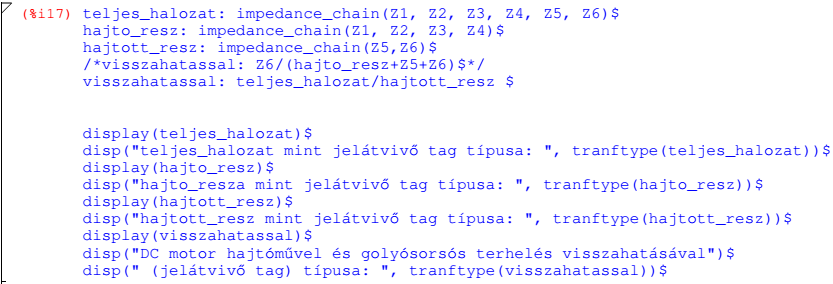
A teljes_halozat az eredmény alapján valóban hatodrendű, PT6, vagyis arányos hat energiatárolós. A hajto_resz PT4, a hajtott_resz PT2, soros eredőjuk nyilván PT6.
A visszahatassal modell a hajtómű kimenete és a DC motor bemenő (feszültség) jele közötti kapcsolatot írja le a golyósorsós mozgásátalakító motorra visszahatását figyelembevéve, PD2T6 tagként. A PD2T6 tag számlálója másodfokú, nevezője hatodfokú polinom.
A teljes hálózat, a hajtó és hajtott rész, valamint a visszahatást figyelembe vevő polinomiális alakú eredő impedanciák és jelátvivő tag típusok meghatározása wxMaxima programmal és a COMA csomaggal:
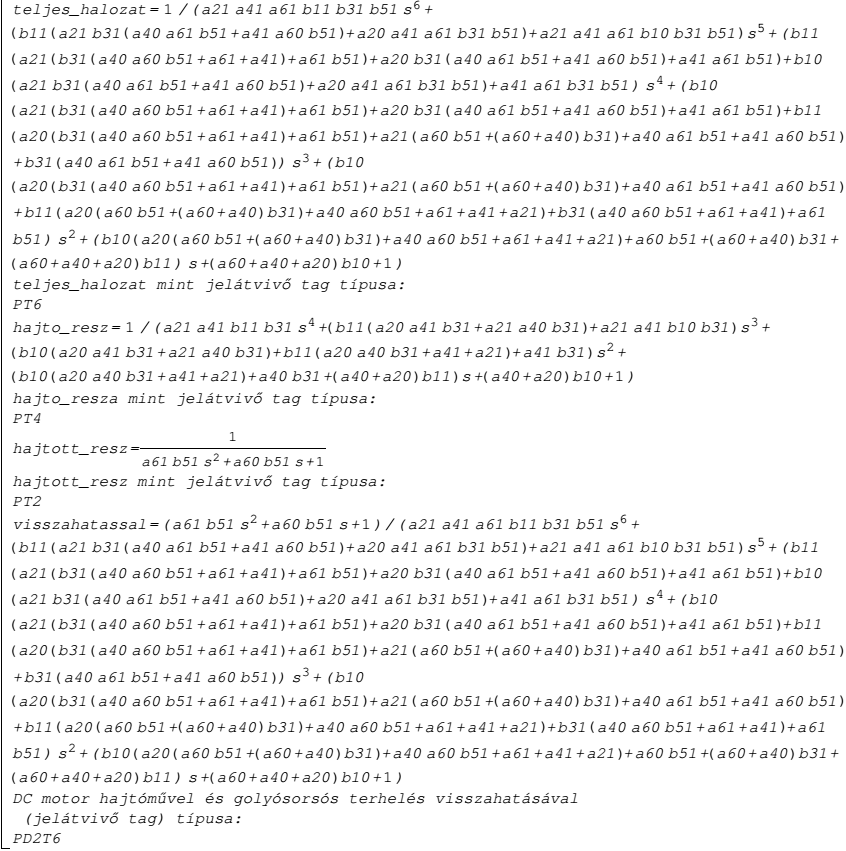
Már ezeken az eredményeken is látszik, hogy nem kézi számításra „termettek”. Különösen igaz ez, ha behelyettesítjük az egyes – megfelelő fizikai mennyiséggel és elemtípussal felírt – impedanciákat és az energiaátalakítók miatt szükséges redukciókat. KM a motorállandó, i a hajtómű módosítása, nv=2π/h a h menetemelkedésű golyósorsós mozgásátalakító mint váltó állandója. A felírt modell helyességét, különösen a redukciókat a mértékegységekkel ellenőrizhetjük.
Redukált impedanciákkal és forrással felírt átviteli függvények wxMaxima programmal és a COMA csomaggal:
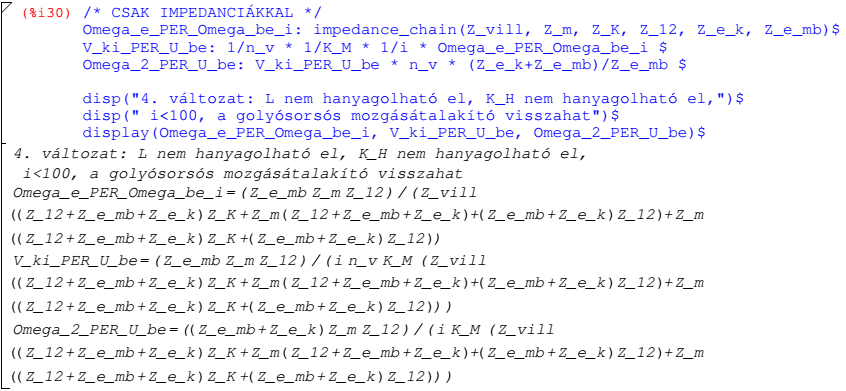
Helyettesítés után látszik, hogy a későbbi szimulációs vizsgálatokhoz szükséges, katalógusadatokkal számított rendszermodellt sem célszerű kézzel számolni! Az egyes paraméterek numerikus adatainak megadásával a kapott matematikai modellt (pl. az átviteli függvény együtthatóit) egyszerűen átmásolhatjuk más szimulációs programba (ha nem a Maximával szeretnénk tovább vizsgálódni).
Redukált impedanciákkal és forrással, helyettesített paraméterekkel felírt átviteli függvények wxMaxima programmal és a COMA csomaggal:
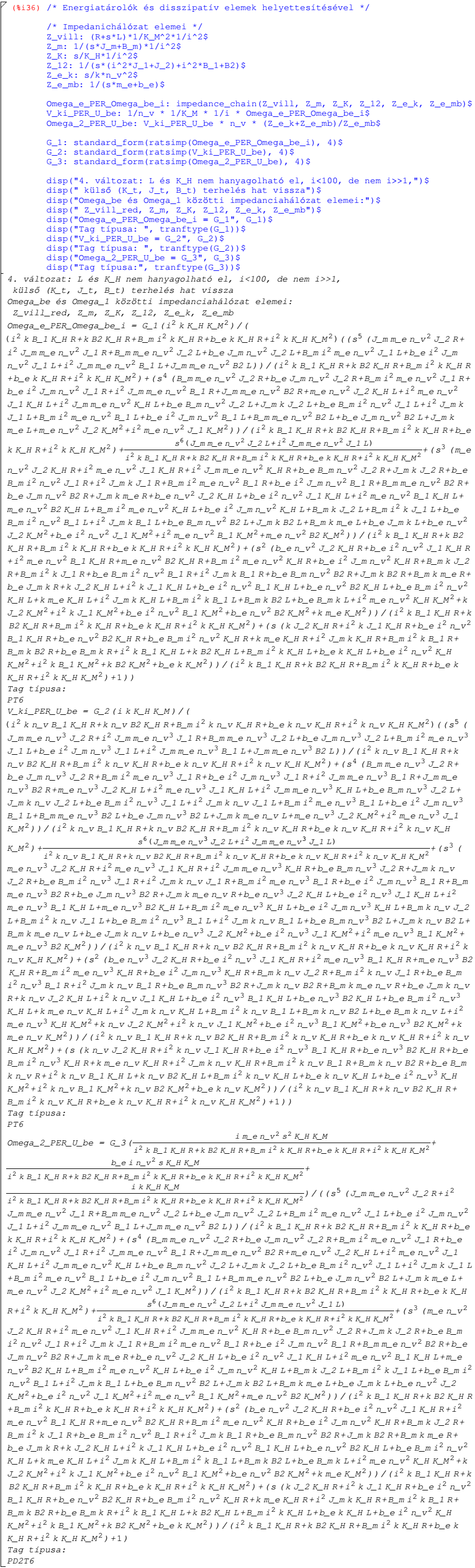
Befejezésként bemutatjuk, hogy a teljesség kedvéért, a visszahatásmentes hajtóművel felépített első, harmad-és negyedrendű modelleket ellenőriztük a Maxima programmal, és azt kaptuk, hogy a programmal számított eredmények megegyeznek a „kézzel” számítottakkal.
Harmadrendű visszhatásmentes rendszer wxMaxima programmal és a COMA csomaggal:
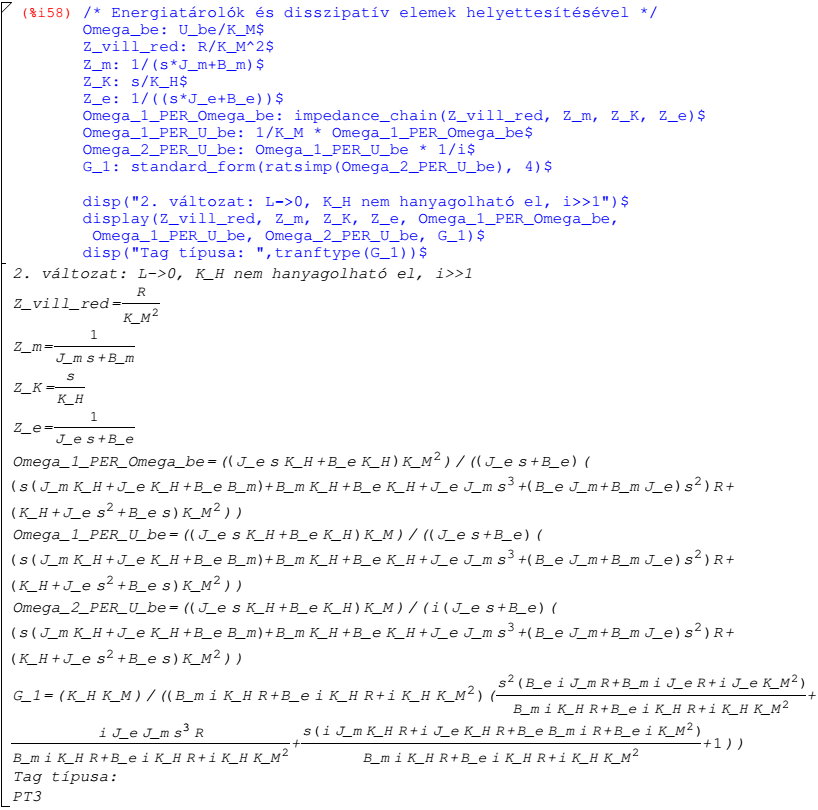
Negyedrendű visszhatásmentes rendszer wxMaxima programmal és a COMA csomaggal:
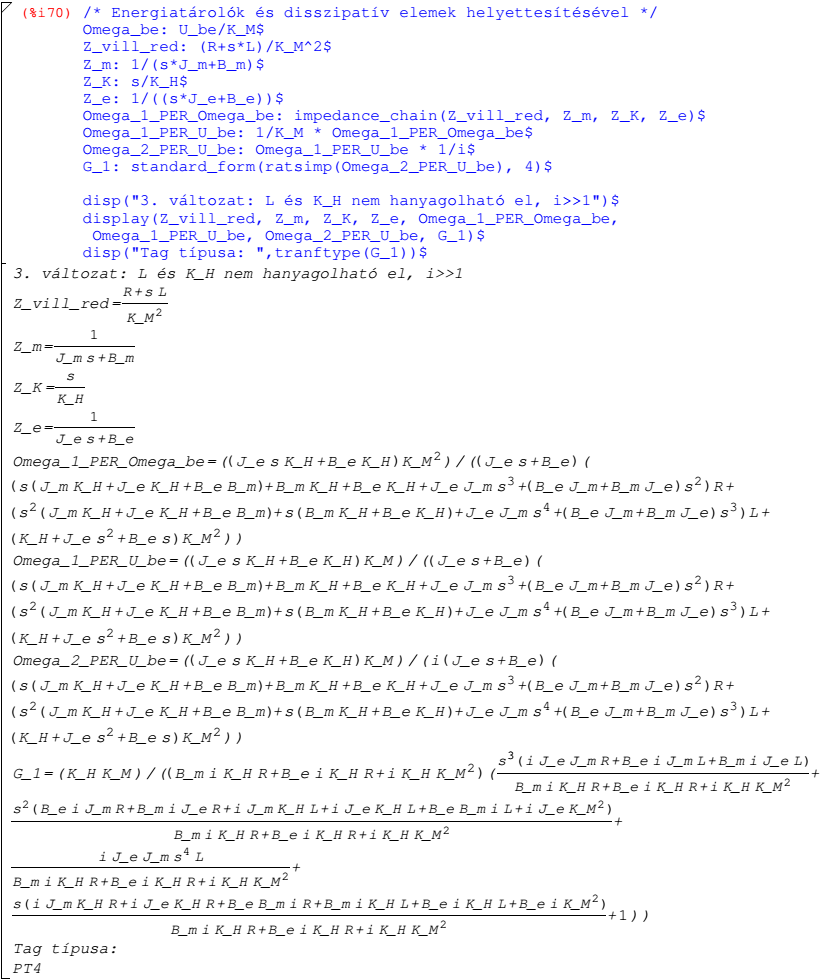
Szakirodalom
[8.1.] Schraubgewinde-Reluktanzmotor: Ein linearer Präzisionsantrieb Maschinenmarkt. Vogel Verlag. Würzburg . 1996.
[8.2.] Objektorientirte Modellierung mechatronischer Systeme am Beispiel geregelter Roboter Fortschritt Berichte VDI Reihe 20. VDI Verlag. Düsseldorf . 1995.
[8.3.] Maxima, a Computer Algebra System: Documentation http://maxima.sourceforge.net/documentation.html.
[8.4.] COMA, Control Engineering with Maxima és Regelungstechnik mit Maxima http://www.austromath.at/daten/maxima/zusatz/Control_Engineering_with_Maxima.pdf.
9. fejezet - Golyósorsós átalakító dinamikai modelljei és tervezése
9.1. Golyósorsó átviteli tényezőjének meghatározása
Ez az energiaátalakító váltó, hiszen eltérő típusú fizikai rendszerek azonos típusú változóit köti össze. A golyósorsó, az egyéb menetes orsókkal ellentétben, olyan jó hatásfokkal rendelkezik (94-96%), hogy gyakorlatban is megközelíti az „ideális” átalakítót. Ha a hajtásláncban a hajtómű nem önzáró, azaz visszahatásmentes, akkor kimagasló hatásfok szükségesé teszi kikapcsolt állapotban az orsó megfelelő fékezését is.
A gyártók által közölt adatlapokon nem szerepel a váltó fontos jellemzőinek levezetése, csupán az értékeket közlik. Ezért a tervezéshez feltétlenül szükséges paramétereket bemutatjuk. A napjainkban, az internet által kínált lehetőségek mellett, a még elérhető nyomtatott katalógusok már nem mindig tartalmaznak magyarázó számításokat. Sokkal jellemzőbb, hogy a cégek, megfelelő díjazás ellenében, komplett számítási programokat bocsátanak rendelkezésre, ezek tartalmába viszont nem nyújtanak betekintést. Előfordul, hogy kínálnak ingyenesen letölthető 2D és 3D CAD rajzokat is, ezek megkönnyítik a konstrukcióhoz való illesztést, ilyeneket találunk például a www.thomsonlinear.com honlapon [9.1.].
Elsőként az átalakítási tényezőt kell meghatározni. A keresztváltozók közötti kapcsolat egyszerű, mert következik az orsó működéséből. Az átmenő változó esetében már óvatosabbnak kell lenni, nem szabad leegyszerűsítve kezelni az erő-erőkar és forgatónyomaték közötti összefüggést.
Az első ábra a golyósorsó géptervezésben szokásos jelölését mutatja, valamint a csapágyazásokat. Az orsót lehet az ábrán látható módon, de lehet csak az egyik végén is csapágyazni. Ezekre az esetekre a gyártók megfelelő faktorokat javasolnak figyelembe venni.

Az orsó menetemelkedését és a geometriából következő értékeket a (9.2. ábra) ábrán mutatjuk be.
Ideális esetet feltételezve írtuk, hogy az „Fs” súrlódó erő zérus. Alatta a keresztváltozók közötti kapcsolat látható. Ha az anya „x” értékkel mozdul el a hossztengely mentén, akkor ezt az elmozdulást az orsó „φ” szögelfordulása hozta létre. Az elmozdulást a „h” menetemelkedésre és a szögelfordulást a teljes „2π” körülfordulásra kell vonatkoztatni, és ebből az átalakítási tényező már adódik: h/2π. Ez a forma lehet reciprok is, esetünkben bemenetnek a forgást tekintjük.
A forgatónyomaték bemenő mennyiség és az anyára ható erő, mint kimenő mennyiség közötti kapcsolatot írja le a soron következő egyenlet. A nyomaték az orsó „r” közepes sugarán (ezen a sugáron támaszkodnak a golyók) „FK” kerületi erőt hoz létre. A keresett „FA” kimenő erő (anyára ható erő) és a kerületi erő közötti kapcsolatot a tangens szögfüggvény segítségével kapjuk. A hasonló háromszögek révén a kimenő (anyára ható) erő és a bemenő nyomaték között 2π/h lesz a kapcsolat.
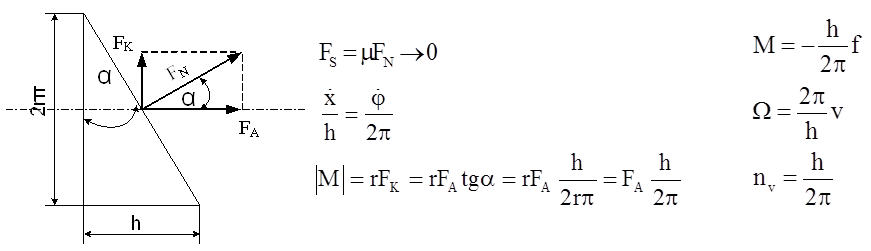
A gráf technikában szokásos módon, az átalakító egyenleteiben az átmenő változók között jelenik meg a negatív előjel, mintegy a négypólus bemenetek ellentétes irányultságának megfelelően. Értelmezhetjük ezt a visszahatás megjelenítéseként is.
Ha a golyósorsó bemenete nyomaték, illetve szögsebesség, akkor kapcsolat felírásához az alábbi formát célszerű választani:
|
|

Az ideális átalakító mellett modelleznünk kell a valós esetet is, mert az orsó-anya kapcsolat nyilvánvalóan rendelkezik eredő rugómerevséggel, nem elhanyagolható az orsó tehetetlenségi nyomatéka és a csapágyazások súrlódási tényezője sem.
9.2. Golyósorsós átalakító rugómerevségének számítása
Tervezés szempontjából a legtanulságosabb az eredő rugómerevség meghatározása. Nem mindegy, hogy a számítások során milyen rugalmasságokat veszünk figyelembe, de még ennél is fontosabb az, hogy a rugalmasságok eredőjét milyen módon állapítjuk meg. A katalógusokban általában az alábbi képletet közlik, ha egyáltalán szerepelnek ilyen részletes számítások. A rugómerevség jelölését meghagytuk, azonban a jegyzetünkben a „c” helyett a „k” a szokásos jelölés. A rugómerevségek alatt minden esetben transzlációs, axiális irányú (a pozícionálási hiba miatt ez a lényeges) rugómerevséget, vagy az erre történő átszámított értékeket értenek a katalógusok:
|
|
Ahol
|
ca |
anya-orsó kapcsolat közötti rugómerevség (függ attól, hogy osztott, vagy szimpla anyával dolgozunk) | |
|
ceff |
az orsó effektív rugómerevsége, amely katalógus adat | |
|
ccs |
a csapágy rugómerevsége, katalógus adat, vagy méréssel meghatározható | |
|
ck |
az orsót befoglaló keretszerkezet rugómerevsége, amely legcélszerűbben végeselem számítással, vagy méréssel határozható meg. |
Néhol kisbetű, néhol nagybetű a jelölés, az előbbi transzlációs, az utóbbi általában rotációs rugómerevséget takar. A két forma között nem jelent gondot az átszámítás, hiszen az átalakítási tényező ismert.
Kérdés, hogy alkalmazható-e ez az összefüggés akkor, ha pozicionáló rendszert építünk? Mit takar ez az eredő számítás?
A katalógus szerinti eredő képlete gráfon ábrázolva a következő képen látható rendszert modellezi, azaz a sorosan kapcsolt rugómerevségek adják a katalógus szerinti eredőt.
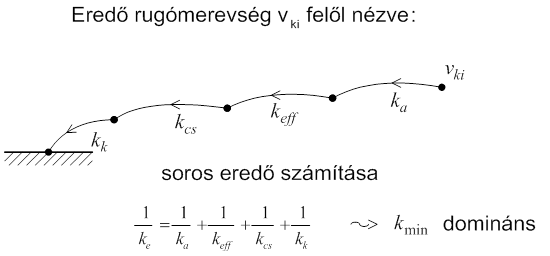
Ez az eredő azt modellezi, hogy egy végtelen merevnek tekintett alapra elhelyezett, és keretbe csapágyazással foglalt orsón mozgó anya milyen rugalmassággal rendelkezik az alaphoz képest. Az anya alaphoz viszonyított sebességét vki-vel jelöltük. Ez a merevség a terhelhetőség miatt fontos a konstruktőr számára, és fontos a szabályozás pontossága szempontjából is, de a szabályozókör tervezésében is szerepet játszik.
A rendszert a következő ábrán mutatjuk be. A rajzon bizonyos nézetvonalakat és egyéb rajzi jelöléseket elhagytunk, hogy a lényeg bemutatását ne zavarják.
A vázlaton a tengelykapcsoló rugómerevségén kívül bejelöltük a katalógus szerinti transzlációs rugómerevségeket. A „v0” és „v1” sebességekkel és csomópontokkal azt illusztráltuk, hogy a csapágy és a keret rugalmassága (kcs és kk) miatt a tengely az alappal párhuzamos elmozdulásra képes, és ez iránya szerint hozzáadódik, vagy levonódik az anya pozíciójából.
Ez a jelenség „normál üzemben” nem jelentkezik, csak akkor, ha az asztal véghelyzetbe ütközik, és az orsó forgatása nem áll le. Szerepe lehet még a rezonancia hajlam meghatározásánál is, de ezt minden konstrukcióra külön kell elemezni. A modellezés során éppen ezért ennek a két rugómerevségnek a soros eredőjét „ke1” formában jelöltük, és végtelen nagynak fogjuk majd tekinteni.
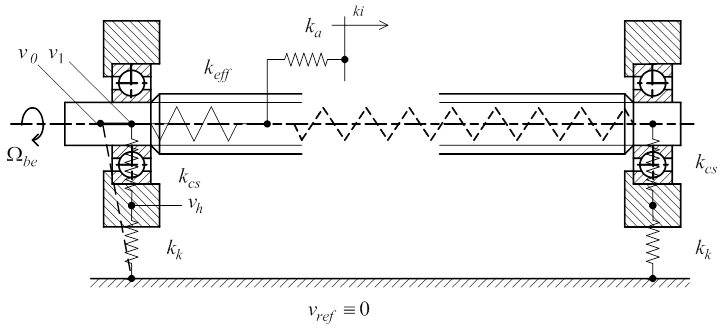
Az orsó torziós rugómerevsége helyett a katalógusok az átszámított transzlációs merevséget adják meg. Az előfeszített anya rugalmassága természetesen transzlációs.
A szerkezeti vázlat alapján készült a következő képen látható gráf. Ezen a gráfon egyszerűsítések nélkül, minden fontos paraméter és azok kapcsolódása megtalálható. A katalógusban szereplő egyenes vonalú rugómerevségekhez képest itt még vegyesen látunk forgó és egyenes vonalú elemeket, valóságos funkciójuknak megfelelően. Az átszámítás a szokásos módon természetesen lehetséges, és ezért a katalógus egyenes vonalú rugómerevség értékei felhasználhatóak.
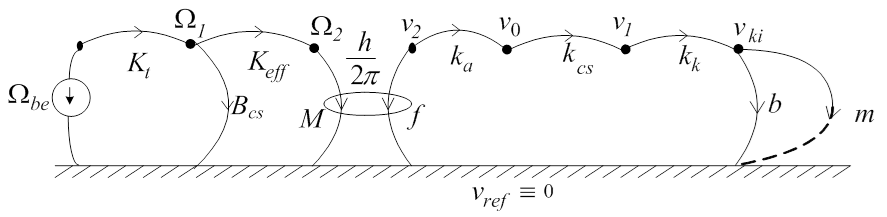
A bemenő mennyiség szögsebesség, általában a hajtómű kimenő mennyisége, ez egy torziós rugalmassággal is bíró tengelykapcsolóra kerül. A tengelykapcsoló szerepe a szög-és tengelyhiba kiegyenlítése. Ezután az orsó torziós rugómerevsége következik, és bejelöltük a csapágysúrlódást modellező „Bcs” csillapítási tényezőt is. Az előfeszített, kettős anya egyértelműen transzlációs rugómerevségéhez kapcsolódik a mozgatott asztal tömege és az egyenes vezeték súrlódását modellező csillapítási tényező. A szerkezeti vázlaton bejelölt két rugómerevséget, a csapágy és a keret két transzlációs irányú rugalmasságát, amelyek az asztal pozíciójában hibát okozhatnak, az anya rugalmasságával sorosan tüntettük fel, ahogy ezt korábban már jeleztük. A kétség kívül transzlációsként modellezhető rugalmasságokat egy váltó segítségével kötjük a tengelykapcsolóhoz. Vigyázat, a sebességek ebben az esetben nem kerületi sebességek, hanem az orsó (keret és csapágy rugalmasság okozta), illetve az anya transzlációs sebességét jelentik!
Annak érdekében, hogy az itt bemutatott tervezési modell ne csak elméleti fejtegetés maradjon, felhasználjuk az egyik gyártó régebbi, nyomtatott katalógusában szereplő méretezési útmutatásokat [9.2.]. A katalógusok általában a transzlációs rugómerevség számítására adnak módszert (N/μm). Ennek oka nyilvánvaló, és az eredő rugómerevség meghatározásának módjában keresendő, hiszen az anya transzlációs pozícionálási hibáját, illetve a mozgatott tömeg transzlációs rezgéseit észleljük, mint dinamikus pozícionálási hibát.
A gráfot átalakítjuk, és a torziós rugómerevségeket a váltók kiiktatásával transzlációsként modellezzük.
Az anya rugómerevségének meghatározása
Előfeszítés nélküli, szimpla anya esetében:

Ahol
N
az anya aktív menetszáma: 2,3,4,5,6,8
FN
feladat szerinti axiális erőterhelés
fm1
merevségi tényező a gyártótól (29,6 … 51,4)
fm2
merevségi tényező előfeszítetlen anyánál: 0,3
Előfeszített, kotyogásmentes (kettős) anya esetében:
A képlet változatlan, fm1 merevségi tényező is.
fm2
merevségi tényező: 0,6
FN=2,38 Fe
ahol Fe a feltételezett maximális axiális terhelés, erre méretezik az anya előfeszítését
N
az osztott anya aktív menetszáma: 2-2, 3-3, 4-4, 5-5, 6-6
Az orsó effektív rugómerevségének kiszámítása
A gyártó a következő képletet adja a merevség kiszámításához:
|
|
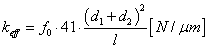
Ahol
|
f0 |
korrekciós faktor: 4, ha csapágyazás mindkét tengelyvégen, 1, ha csak az egyiken | |
|
d1 |
orsó külső átmérője mm-ben | |
|
d2 |
orsó magátmérője mm-ben | |
|
l |
szabad orsóhossz mm-ben |
A csapágy rugómerevsége katalógus adat (de nem állandó, hanem függ a terheléstől), a keret rugómerevségét pedig legcélszerűbb a „drótmodellen” végzett mérésekkel ellenőrizni, de becsülhető végeselemes modellezés útján is. A csapágyak „Bcs” csillapítási tényezőjét a modellezésben nem vettük figyelembe, mert hatása az egyenes vezetésből adódó csillapításhoz képest elhanyagolható, figyelembe vételével ugyanakkor a számítás lényegesen bonyolultabbá válna.
A tervezésbe szükségszerűen be kell vonni a hajtómű kimenő tengelyét a golyósorsóval összekötő tengelykapcsolót. Különösen kisebb méretek esetén fordulhat elő, hogy a fenti rugómerevségeknél lényegesen kisebb a tengelykapcsoló torziós rugómerevsége. Ezeknek általában kettős szerep jut, ki kell egyenlíteniük a tengely-eltérést és az esetleges szöghibát. Úgy tervezik őket, hogy kellő torziós merevség mellett ennek a két hibának a kiküszöbölésére alkalmasak legyenek. A gyakorlati kivitelük általában csőmembrán-szerű, hullámos profillal, vagy vastag falú, hengeres, 120 fokkal eltolt bemetszésekkel. Tekintettel arra, hogy a legkisebb rugómerevség lesz a mértékadó, a tengelykapcsolót nem lehet figyelmen kívül hagyni a tervezés során.
A tengelykapcsoló még torziós rugómerevségként szerepel, hogy az átviteli függvény csomóponti módszerrel történő felírásához olyan rendszert kapjunk, amelyben a csomópontok függősége didaktikai okok miatt bemutatható.
A következő ábrán már egy olyan egyszerűsített gráf látható, amelyen „Bcs” nem szerepel, de még számolunk a „ke1” rugómerevség hatásával a rezonanciahajlam vizsgálatában.

A két csomóponti változó, Ωbe és vbe ugyanis nem függetlenek, így a hozzájuk kapcsolódóan felírható csomóponti egyenleteket egymásba kell majd helyettesíteni, a két változó közül csak az egyik maradhat.
A két soros eredő rugómerevséget össze kell vonni, és az eredőjüket a továbbiakban ke-vel fogjuk jelölni.
|
|

Elsőként határozzuk meg a rendszer átviteli függvényét csomóponti módszerrel, hiszen a keresett kimenő mennyiség keresztváltozó.
9.3. Átviteli függvény felírása csomóponti módszerrel
A 9.2. szakasz kiindulásnak tekinthető gráfját ebben az esetben szándékosan nem redukáltuk, hogy a csomópontok közötti összefüggés nyilvánvalóvá váljon.
A gráfon látható csomóponti változók Ωbe, vbe és vki. Valójában nincs három független változó, csak kettő, mert Ωbe, és vbe lineárisan összefüggenek, és ez az egyenletek egymásba építése során nyilvánvalóvá válik. A három csomóponti változóra felírt csomóponti egyenletek, valamint a két váltó egyenlete a következő:
|
|
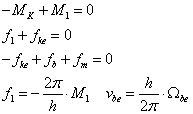
A forgó rendszerrészhez tartozó egyenletet beépítjük a váltó csomóponti változók közötti összefüggésébe és felhasználjuk a keresztváltozók közötti egyenletet is:
|
|
A második és a harmadik csomóponti egyenlet a behelyettesítés után:
|
|
A továbblépéshez szükséges a Laplace transzformáció, mert így kapunk algebrai egyenletrendszert. Végül a mátrixos felírási mód:
|
|
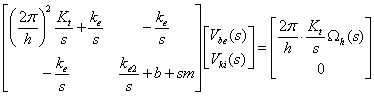
Rövid dimenzió ellenőrzés után tovább lehet lépni. Az admittancia mátrix a11 eleme tulajdonképpen 2 db párhuzamosan kapcsolt rugómerevség eredő admittanciája, tehát a rugómerevségek összeadhatóak, de egy gyakorlati tanács: A inverz mátrix determinánsában (nevező) csak akkor látjuk a negatív előjelű tag „eltűnését”, ha a rugómerevségekkel külön-külön végezzük el a beszorzást, tehát az ilyen összevonásokat „nem kell elsietni”. Az következő egyenletben a redukció révén Kt–t transzlációs paraméterré számítottuk át, ez viszont célszerű:
|
| ||
|
|

Esetünkben csak a Vki(s) változó keresett, ezért célszerű a Cramer szabályt alkalmazni. A nevező miatt nem vontuk össze a rugómerevségeket:
|
|
A kijelölt műveletek elvégzése után az átviteli függvény egy lehetséges formáját alakítjuk ki úgy, hogy a két rugómerevség eredőjét most behelyettesítjük a kapott összefüggésbe.
|
|
A nevező operátortól független tagjával osztjuk a tört számlálóját és nevezőjét, ezzel a szokványos szabályozástechnikai alakot kapjuk:
|
|
A rendszer linearizált paraméterekkel másodrendű, de jól látható, hogy az átviteli függvényben két rugómerevség soros eredője szerepel:
|
| ||
|
|

Az átviteli függvény igen egyszerű alakot mutat, de nem szabad elfelejtenünk, hogy a paraméterek (m, b, k) összetett számítások eredményeként születtek.
9.4. Átviteli függvény felírása impedancia módszerrel
A 9.2. szakasz végén látható gráfon, a váltó baloldalán álló forrást és torziós rugómerevséget célszerű a jobb oldalra redukálni, átszámítani, ha impedancia módszerrel keressük a matematikai modellt.
Nagyon fontos kiemelni, hogy a transzlációs rendszerré egységesített rendszerben Vh forrás szerepel, és ez nem azonos a Ωh-val! Ennek az új forrás értéknek a kiszámítását igen gyakran elfelejtik, és ebből komoly hiba származik.
Látható, hogy a „ke1” rugómerevséget a modellben végtelen nagynak tekintjük, ezért a gráfon már nem szerepel.
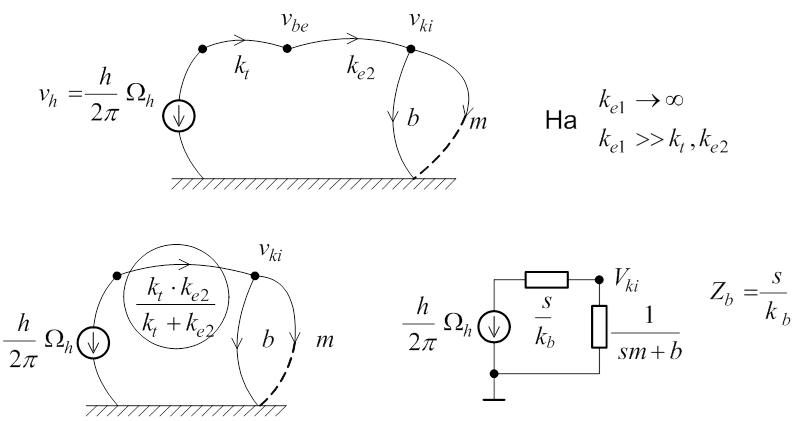
A csomóponti módszerrel kapott eredménnyel való összehasonlítás kínálkozik, ha felírjuk a keresztváltozó osztót, ami valójában a keresett átviteli függvény:
|
|
Láttuk már korábban, hogy törekedni kell a szabályozástechnikában alkalmazott átviteli függvény alakra, ezért végül az alábbi formát kapjuk:
|
|
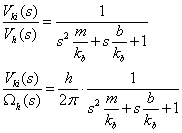
Jól látható, hogy a két módszerrel kapott eredmény azonos. Az átviteli függvényből az állapottér modell visszavezetett (normál) alakja könnyen felírható, és ugyancsak felírható inverz Laplace transzformálás után vki(t)-re a másodrendű állandó együtthatós, lineáris differenciálegyenlet.
Ha a golyósorsós átalakítót pozícionálási feladatra alkalmazzuk, akkor az átviteli függvényt „Xki” változóra kell felírni, és tekintettel arra, hogy a sebesség és az elmozdulás között egy integrálási művelet van, az átviteli függvény nevezőjében megjelenik szorzóként az „s” operátor.
|
|
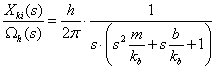
Szakirodalom
[9.1.] www.thomsonlinear.com.
[9.2.] Kugelgewindetriebe. FAG Lineartechnik.
10. fejezet - Vonóelemes átalakító és dinamikai modelljei és tervezése
10.1. Vonóelemes hajtások rendszerezése
Bevezetőként rendszerezzük azokat vonóelemes hajtásokat, amelyek a gépészet területén dominánsan előfordulnak. Ezek közül nem mindegyik alkalmas arra, hogy szabályozott szakasz részeként, a mechatronikában is alkalmazást nyerjenek.
A következő ábrán látható egy lehetséges rendszerezés:
![A vonóelemes hajtások áttekintése [10.1.]](images/image_X_1.png)
A mechatronikai szerkezetekben csak három változatot, az
acélszalagos (pl.: merevlemezes adattároló)
acélsodronyos, acélhuzalos (pl.: vegyi analizátorok)
fogazott szíjas (nyomtatók, robotok, szerszámgépek, felületszerelő automaták)
mozgásátalakítókat alkalmazzák a szabályozott szakaszokban.
A három vonóelem típus közül természetesen a fogazott szíj (vagy fogasszíj) a mechatronikában csaknem egyeduralkodó, a másik két változat speciális konstrukciókban fordul elő. Ilyen szerkezet a merevlemezes egység, amelyben acélszalag biztosítja a fej ultraprecíziós szögelfordulását. A szalag vastagsága és a körülfogási rádiusz úgy vannak összehangolva, hogy a szalag hajlításából eredő rugalmasság a pontosságot ne befolyásolja. A finommechanikai konstrukció területén ismert fogalom a fémszalagos mozgásátalakító körülfogási ívre történő méretezése. A másik vonóelemet, a sodrott acélhuzalt, főként kisebb méretű berendezésekben, analitikai műszerekben alkalmazzák, ott, ahol a környezeti feltételek miatt a természetes gumi illetve műanyag mátrixú fogazott szíjat nem lehet beépíteni. A sodrott acélhuzal alatt természetesen kis átmérőket kell érteni, jellemzően a 0.5 – 1.5 mm tartományt. W. Krause munkáiban számos speciális finommechanikai konstrukció méretezési útmutatóját megtaláljuk, ilyen pl. a Konstruktionselemente der Feinmechanik [10.2.].
A következő ábrán azt mutatjuk be, hogy a fogazott szíj milyen sokféle konstrukciós elrendezést tesz lehetővé. Vannak ezek között olyan elrendezések, amelyek más vonóelemmel is működőképesek, kivételt képeznek természetesen az olyan eszközök, amelyeknél külső és belső fogazás a működés feltétele. Mint ahogy más esetben is, a fogazott szíjas átalakító sem „tud mindent”, hiszen számtalan előnyös tulajdonsága mellett a golyósorsóhoz képest kisebb a terhelhetősége és a pozícionálási pontossága.
![Fogazott szíjas hajtás sokoldalú kialakítása [10.1.]](images/image_X_2.png)
10.2. Fogazott szíjas átalakító szerepe a mechatronikában
A fogazott szíjas mozgásátalakító mechatronikában betöltött szerepe miatt az alábbiakban gyűjtöttük össze mindazokat a tulajdonságokat, amelyek előnyösek és amelyek az alkalmazhatóságot valamilyen mértékben korlátozzák.
Előnyös tulajdonságok:
nagy teljesítménysűrűség,
szinkron és csúszásmentes mozgásátvitel,
kis zaj,
kis tömeg,
kedvező árfekvés,
nagy szíjsebességek lehetségesek (kb. 80 m/s határig),
rezgéscsillapító hatás,
hatásfok névleges terhelésnél 98%-ot érhet el,
helyes szíjfeszítésnél alacsony tengelyterhelés,
karbantartási igény kevés (nincs kenés, esetenként szíjfeszesség állítás),
erőátvitel kitérő tengelyeknél lehetséges,
részlegesen szabványosított [ISO 5296; DIN 7721; ISO 13050; stb.].
Hátrányos tulajdonságok:
szíjanyagtól függően olajok, savak, lúgok, víz és zsírok ellen korlátozott ellenálló képesség (főként standard típusok esetében),
Korlátozott a hőmérséklet tartomány (pl.: NBR: -40°C-tól +130°C-ig),
érzékeny homokkal, porral és hasonló szemcsés anyagokkal szemben
10.3. Ideális vonóelemes átalakító
Az ideális vonóelemes váltó nem tartalmaz passzív modell elemeket (tehetetlenségek, rugómerevség, csillapítás). Ilyen helyzet a valóságos mozgató szerkezetekben nem fordul elő. Ha elhagyjuk a modell paramétereket, akkor a váltó a hajtóműre hasonlít, és a kimeneti-bemeneti szögsebességeket csupán az „i” módosítás köti össze:
|
|
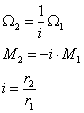
Általános esetben a gépszerkezeteknél szokásos maximális módosítás (lassítás) és áttétel (gyorsítás) is megvalósítható, a két tárcsa aránya azonban nem lehet nagyobb, mint 10. A mechatronikában főként robotok esetében találkozunk ilyen megoldással, ld. következő kép.
Érdekes megfigyelni, hogy a nagy nyomatékátvitel ellenére a robot fogazott szíja az arányokat figyelembe véve keskenyebb, mint egy lineáris mozgató elemé. Ennek okáról részletesen lesz szó a vonóelemes szakasz méretezésénél, itt előzetesen csak annyit, hogy a fogazott szíjas vonóelem rúgómerevségének, és egyben a pozícionálás pontosságának a növelése elsősorban a szélesség növelésével érhető el.

10.4. Valós vonóelemes átalakító
A valós vonóelemes átalakító (váltó) szerkezeti vázlata általános formában az alábbi:
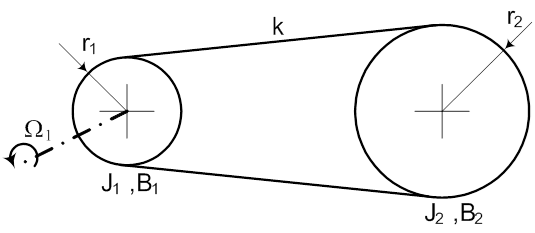
A modell paraméterek láthatók az ábrán. Ezek a tárcsák tehetetlenségi nyomatékai, a csapágyazások csillapítási tényezői és a vonóelem rugómerevsége. Ez utóbbi transzlációs mechanikai elem, ezért a rendszerben két váltót kell elképzelnünk, ahogy azt a 10.5. ábra gráfon ábrázoltuk. A módosítás a mechatronikában szokásos formában i=r2/r1, és ez az érték természetesen lehet egy is. A gráfon már megkülönböztettük a terhelt (húzott) ág kT rugómerevségét a terheletlentől (szabadtól) kSZ.
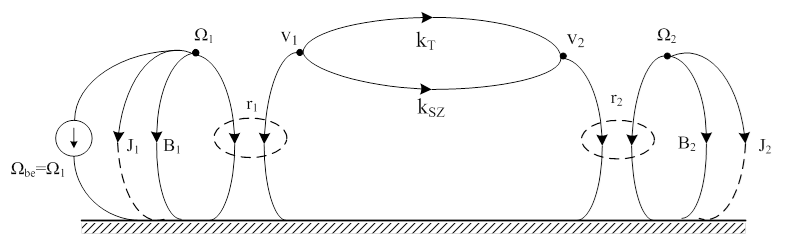
A gráf tovább egyszerűsíthető, és a váltó valós esetben az alábbi formájú lesz. A két párhuzamos rugómerevség eredőjét egyszerű összeadással kapjuk.
A váltó másodrendű, a forrással párhuzamosan kapcsolt elemeket nem kell figyelembe venni. A két energia tárló ke és J2, amelyek egymással természetesen lengéshajlamú rendszert képeznek. A matematikai modellt a gráf alapján szerkesztett impedancia hálózatból írjuk fel. A vonóelem transzlációs rugómerevségét rotációssá számítjuk át, és felrajzoljuk az impedancia kapcsolást:
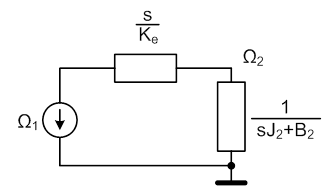
A kapcsolásban az átszámítás eredménye:
|
|

Ennek felhasználásával az átviteli függvény az alábbi lesz:
|
|
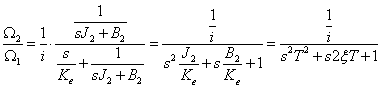
10.5. Vonóelemes lineáris mozgató
A mechatronikában igen gyakran lehet találkozni különféle módon felépített lineáris mozgatókkal. Ezek a robottechnikában és az automatizált szerelésben nélkülözhetetlen építőelemek. A lineáris mozgatók alapvetően négy változatban készülnek. Van olyan gyártó cég, amely arra törekszik, hogy a különböző elven működő lineáris egységei a beszerelés szempontjából csereszabatosak legyenek. Ezért pl. egy pneumatikus munkahenger kiváltható egy más műszaki paraméterekkel rendelkező golyósorsós lineáris egységgel, egy vonóelemessel, vagy egy fogaslécessel úgy hogy az egységek felfogó furatai azonos helyen találhatóak. Tolóerő és pozícionálási pontosság tekintetében eltérőek, mint ahogy egy rugalmas gyártócellában eltérőek lehetnek a feladatok is.
A vonóelemes (fogazott szíjas) pozícionálóval, mint szabályozott szakasszal a 12. fejezet fejezetben részletesen foglalkozunk. Az ipari gyakorlatban ezt a rendszert és a golyósorsós mozgásátalakítót „lineáris elemnek”, vagy „lineáris mozgatónak” is nevezik. A legfontosabb építőelemek a motorral egybeépített hajtómű, a tengelykapcsoló, a hajtó és a hajtott fogazott tárcsa (kerék) és a fogazott szíj, mint vonóelem a hozzá kapcsolt, mozgatott tömeggel. Ez az esetek többségében egy tárgyasztal, vagy keret.
A következő képen egy háromkoordinátás pozicionáló látható. A vonóelemes mozgatás lehetővé teszi, hogy a vízszintes síkban egyszerű módon lehessen a függőleges irányú lineáris elemet pozícionálni. A vonóelemmel ez az összetett mozgás megoldható, golyósorsó alkalmazása esetén két külön egymásra merőleges mozgatóra lenne szükség, nagyobb a mozgatott tömeg. Előny, hogy a koordináták függetlenek egymástól. A képen látható rendszerben a két koordináta mentén történő mozgatás nem független, de kisebb a mozgatott tömeg, mert a vízszintes síkon mozgató két motor-hajtómű egység az álló részen (fix kereten) helyezkedik el. Ugyanakkor hátrány, hogy a két motor összehangolt szabályozása szükséges ahhoz, hogy a függőleges szerelő fej valamelyik tengellyel párhuzamosan tudjon mozogni.
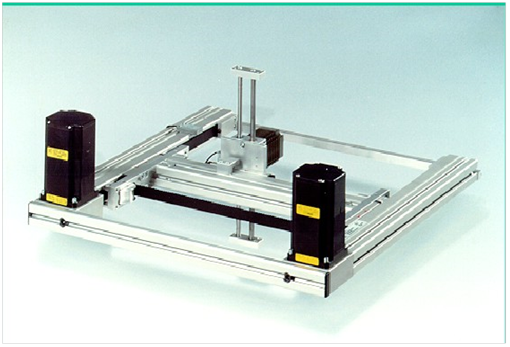
A vonóelemes átalakítót leválasztjuk a motor-hajtómű egységről, és részletes vizsgálat tárgyává tesszük. A bemenő jel célszerűen a hajtómű Ω2 kimenő fordulatszáma lesz. A hajtómű és a hajtó fogazott tárcsa között a konstrukció követelményeinek megfelelően lehet tengelykapcsoló, de a fogazott tárcsa elhelyezhető közvetlenül a hajtómű kimenő tengelyén is.
A mechanikai váltó szerkezeti modellje a következő ábrán látható:
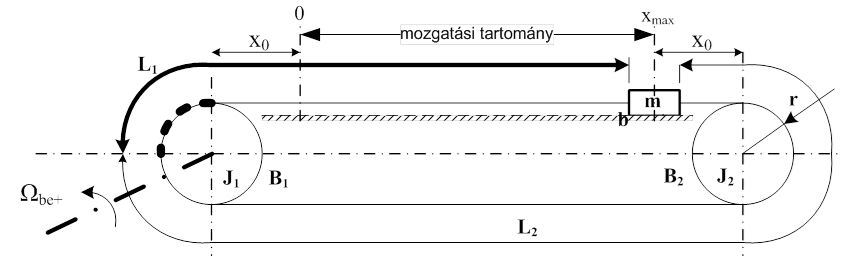
A szerkezeti modell alapján a következő gráf rajzolható fel:
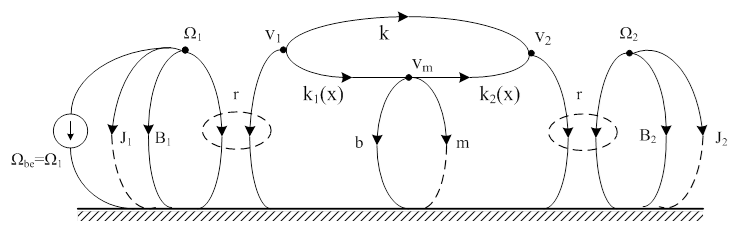
A szíj ágak egyik végpontja a mozgatott tömegen van, a másik a rugómerevség miatt lényegesebb. Ha az ábrán látható módon azonos a két tárcsa sugara, akkor a fogazott szíj a forgató tárcsa 1/4 kerületén van a legnagyobb erőhatásnak kitéve, ezen a szakaszon a legnagyobb a fogak deformációja. Ezt a körívet szaggatott vonallal jelöltük. Az un. kifutó íven, az alsó 1/4 kerületen a terhelés lényegesen kisebb.
![A forgató tárcsa fogai által okozott feszültség a fogazott szíjban (VEM) [10.1.]](images/image_X_11.png)
A gráf forrása szögsebesség, feltételezve a hajtómű visszahatás mentességét. Ha a hajtómű nem visszahatásmentes, akkor a motor-hajtómű-vonóelemes átalakító egység csak egyetlen gráfban szerepeltethető, szétválasztás nem lehetséges. A keresztváltozó forrás első hatása, hogy a vele párhuzamosan kapcsolt elemek kiiktathatók, hiszen a forrás értéke rajtuk elő van írva. Gyakorlati szempontból célszerű lehet azonban a J1 és B1 értékeket a hajtómű megegyező típusú kimeneti paramétereihez hozzáadni, mert kritikusabb esetekben ebből a rezonancia frekvencia módosulása származhat. A vonóelemes átalakítók jellegzetes eleme az „r” sugarú tárcsa, amely a forgó mozgást egyenes vonalúvá alakítja. Már jeleztük korábban, hogy a fogazott szíj rugómerevségét a szíj szélességével lehet beállítani. A lineáris mozgatók szíjai azért tűnnek aránytalanul szélesnek, mert ezek esetében a pozícionálási pontosság érdekében növelték a szíj rugómerevségét. A lineáris pozícionálónál a pozícionálási tűrés elsőrangú szempont.

A visszatérítő tárcsa J2 és B2 paramétereit megjelenítettük. Szerepük a méreteken és a dinamikával szemben támasztott követelményeken múlik. A két tárcsa kerületi sebességét v1 és v2 jelöli. A mozgatott tömeg sebessége vm, és ehhez a csomóponthoz tartozik maga a tömeg és az egyenes vezetésből származó csillapítási tényező. Az identifikált keresztváltozókat kötjük össze az átalakító többi fontos és jellemző paraméterével, a vonóelem (szíj) ágak rugómerevségével. A gráfon k1(x) és k2(x) nemlineáris voltát azért hangsúlyozzuk, mert a tananyagban a nemlineáris vonóelemes pozícionáló állapotszabályozásával külön, a 12. fejezet fejezetben foglalkozunk. Természetes, hogy lehet olyan konstrukció, amelyben a mozgatott tömeg hajtótárcsától való távolsága erőteljesen befolyásolja a vonóelem (szíj) ágak rugómerevségét. A gyakorlatban előforduló vonóelemes rendszerek nagyobb részében elegendő az a linearizált modell, amelyet majd a következőkben fogunk bemutatni.
Az egyszerűsített gráfon szereplő ke eredő rugómerevséget a katalógusok által megadott módon kell meghatározni. Dinamikai szempontból számunkra az fontos, hogy a linearizált rendszer másodrendű. Tekintettel arra, hogy a későbbiekben a nemlineáris változat állapottér modelljével még részletesen foglalkozni fogunk, a továbbiakban az egyszerű szabályozás megtervezéséhez elegendő az átviteli függvény ismerete. Ehhez a legegyszerűbben az impedancia módszer alkalmazásával jutunk.
Első lépésben felrajzoltuk a gráfot.
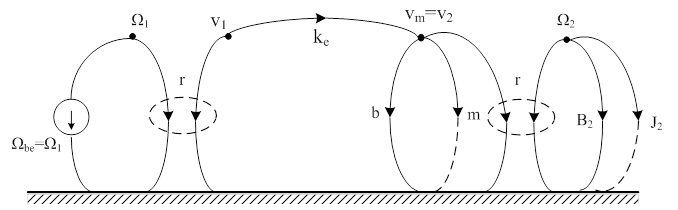
A gráfból impedancia hálózatot hozunk létre, ha a matematikai modell felírásához választott módszer az impedancia módszer.
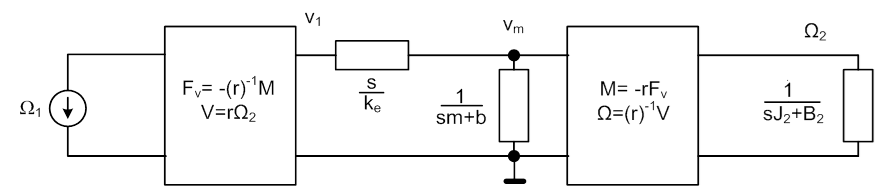
A megszokott módon átszámítjuk a forrást egyenes vonalúvá, és redukáljuk a visszatérítő tárcsa impedanciáit az egyenes vonalú rendszerrészre. Ezekkel egy igen egyszerű kapcsoláshoz jutunk, amelyre további átformálások nélkül felírható a keresztváltozó osztó, a keresett átviteli függvény implicit formája.
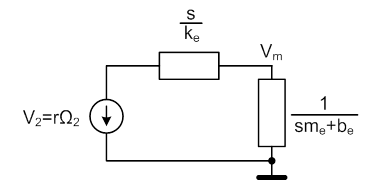
Az új forrás értéke a kapcsoláson látható, az eredő tömeg és csillapítási tényező értéke pedig a következők:
|
|

Az eredő vonóelem rugómerevség (főként fogazott szíjaknál) a katalógusok ajánlása szerint a következőképpen határozható meg:
|
|
Ahol
|
kSP [N/mm] |
specifikus rugómerevség, a vonóelem (szíj) egy milliméter szélességére vonatkoztatva | |
|
h [mm] |
vonóelem szélessége | |
|
L1 [mm] |
húzott (terhelt) ág hossza | |
|
L2 [mm] |
terheletlen ág hossza |
A képlet nem rejtélyes, ha a következőket meggondoljuk. Osszuk el a két hosszúság összetevőt a nevezővel, és azonnal látszik, hogy két rugómerevség összegéről van szó. Ezek a képlet alapján kizárólag párhuzamosan lehetnek kapcsolva:
|
|

A párhuzamos kapcsolás felismerhető a működési vázlaton is. Jól kivehető, hogy az L1 és L2 hosszúságú vonóelem mindkét vége azonos helyen van rögzítve. Az egyik rögzítési pont a mozgatott tömeg, a másik a hajtó tárcsa kerületén van, azon a ponton, amelyik felezi a vonóelem által létrejövő körülfogási ívet. Ez a körülfogási ív lehet kisebb is, mint a kerület fele, ha a két tárcsa közül a hajtó a kisebb sugarú.
Az impedancia kapcsolás alapján felírható az átviteli függvény:
|
|
Az eredeti bemenő mennyiség szögsebesség volt, ezért a keresztváltozó osztó felírása után egy további lépésre még szükség van:
|
|
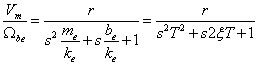
Lényegét tekintve a linearizált vonóelemes mozgató ugyanolyan másodrendű rendszer, mint a valós vonóelemes átalakító, ahogy ezt korábban már annak tárgyalásakor is említettük.
Szakirodalom
[10.1.] Zahnriemengetriebe. Hanser Verlag. München-Wien . 2008.
[10.2.] Konstruktionselemente der Feinmechanik. Hanser Verlag. München . 2004.
11. fejezet - Golyósorsós pozicionáló szakasz tervezése
A golyósorsós mozgásátalakítóval megvalósított pozicionáló szabályozott szakaszának leggyakrabban megvalósított formáját mutatja a következő ábra. Ezt az elrendezést a három koordinátának megfelelően egymásra építve is szokás alkalmazni („huckepack” elrendezés, kombinált rendszer), figyelembe véve természetesen a terhelést, amely egy-egy irányú mozgás megvalósítása révén az alsóbbakra átadódik. Ha a rendszer függőleges helyzetű, akkor a méretezésénél külön figyelembe kell venni az emelésnél és süllyesztésnél fellépő mennyiségeket.
A példánkban egy irány dinamikai szempontból történő méretezését mutatjuk be, ami a megfelelő motor kiválasztását és a szakasz elvárt dinamikai jellemzőit foglalja magába. A géptervezés szempontjából történő méretezés további feladatokat ró a tervezőre. Ilyenek az átlagos (közepes) fordulatszám és az axiális terhelés közötti összefüggés, az anya előfeszítettsége és a terhelés közötti kapcsolat, az anya és az orsó névleges élettartama, a kritikus fordulatszám meghatározása, és az orsóra ható megengedett hajlító erő kiszámítása. Konstrukciós szempontból fontos, hogy a gyártási pontatlanságok ismeretében legyenek jusztírozási (finombeállítási) lehetőségek is a vezetékek keretbe történő rögzítésénél, és a golyósorsó önbeálló csapágyazással legyen ellátva. Ezen a helyen érdemes megemlíteni, hogy a PI (Waldbronn) cég már 1992-ben utólagos jusztírozási lehetőségek nélkül, igen magas színvonalú gyártóberendezésekkel készítette precíziós pozícionáló asztalait, többek között az ábrán látható elrendezésben is, „nulla” tűréssel. Ez természetesen csak „céges szleng”, nulla tűréssel nem lehet gyártani, viszont a valóságban a tűrés olyan szigorú, hogy a pozícionálási bizonytalanságnak csupán tört részét képezi.
Ha nem is a fejezetben látható részletességgel, de bizonyos gyártók adnak számítási segédleteket a termékeikhez. Ilyen példát találhatunk a golyósorsós lineáris szán tervezéséhez a www.boschrexroth.com honlapon [11.1.], pl.: a Linearschlitten, Berechnung (számítási segédlet) oldalon. Az ilyen részletességű ismertetés azonban az internetes katalógusokban csak elvétve fordul elő. A géptervező mechatronikai mérnök figyelmébe segédletként M. Weck: Werkzeugmaschinen Bd.3. [11.2.] 1995-ben megjelent kötetét ajánljuk.
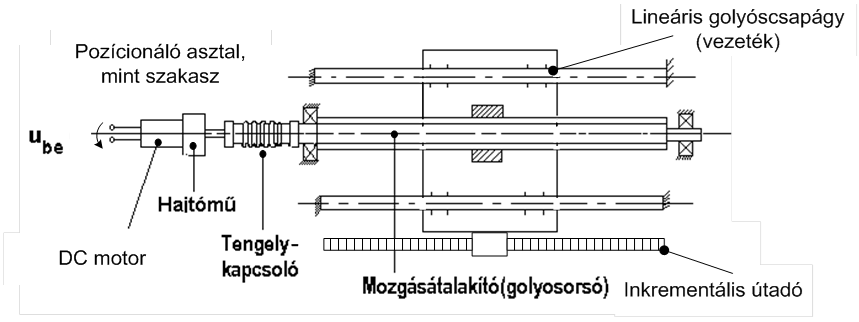
11.1. A motor és hajtómű kiválasztása
A következő lépésekben tehát a motor kiválasztásához elengedhetetlen számításokat mutatjuk be, amelyek megértéséhez szükségesek a 9. fejezet fejezetben, a golyósorsós mozgásátalakító általános modellezésénél bemutatott összefüggések.
A méretezés során rendszeresen előforduló mennyiségek jelölését és mértékegységüket az alábbiakban adjuk meg:
|
d1 |
[mm] |
orsó külső átmérője | |
|
d2 |
[mm] |
orsó magátmérője | |
|
h |
[mm] |
orsó menetemelkedése | |
|
l |
[mm] |
az orsó szabad (működő) hossza | |
|
m |
[kg] |
mozgatott tömeg | |
|
i |
hajtómű módosítása (i˃1: lassítás) | ||
|
F |
[N] |
előtoló erő (tervezett, igényelt) | |
|
Ff |
[N] |
előfeszítési erő (kettős anyánál) | |
|
Fs |
[N] |
egyenes vezetéken fellépő súrlódási erő | |
|
Fa |
[N] |
gyorsító erő | |
|
M0 |
[Nm] |
üresjárati nyomaték | |
|
MT1 |
[Nm] |
terhelő nyomaték állandó sebességű emelésnél | |
|
MT2 |
[Nm] |
terhelő nyomaték állandó sebességű süllyedésnél | |
|
MM |
[Nm] |
motor hajtó (villamos) nyomatéka | |
|
MTa |
[Nm] |
terhelő nyomaték gyorsításnál | |
|
Ma |
[Nm] |
gyorsító nyomaték | |
|
MMa |
[Nm] |
motor hajtónyomaték gyorsításnál | |
|
MS |
[Nm] |
orsó csapágyazások eredő súrlódó nyomatéka, a „többi súrlódás” M0-ban | |
|
MSH |
[Nm] |
hajtómű eredő súrlódó nyomatéka | |
|
Jm |
[kgm2] |
motor forgórész tehetetlenségi nyomatéka | |
|
Jo |
[kgm2] |
orsó tehetetlenségi nyomatéka | |
|
Jmr |
[kgm2] |
a mozgatott tömeg átszámított tehetetlenségi nyomatéka | |
|
J |
[kgm2] |
tehetetlenségi nyomaték | |
|
J1,2 |
[kgm2] |
hajtómű bemeneti és kimeneti oldali tehetetlenségi nyomatéka | |
|
B1,2 |
[Nms/r] |
hajtómű bemeneti és kimeneti oldali csillapítási tényezői | |
|
Pm |
[W] |
motor teljesítmény konstans sebességnél | |
|
Pma |
[W] |
motor teljesítmény gyorsításnál | |
|
sa |
[mm] |
gyorsítási úthossz | |
|
ta |
[s] |
gyorsítási idő | |
|
v |
[m/s] |
előtolás sebessége, azaz az asztal előírt végsebessége | |
|
nM |
[1/min] |
motor fordulatszám | |
|
η |
hajtómű hatásfoka | ||
|
η1 |
golyósorsós átalakító hatásfoka emelésnél | ||
|
η2 |
golyósorsós átalakító hatásfoka süllyedésnél | ||
|
c |
előfeszítési együttható (0,1…0,19) az anyánál fellépő súrlódó erő számításához |
A motor szükséges nyomatékának meghatározása állandó fordulatszám esetén
Ez a méretezés viszonylag egyszerű. A motor hajtónyomatékának meghatározásához az alábbi összetevők szükségesek. Ha a pozícionáló függőleges helyzetben is működtetve lesz, akkor süllyesztésnél az MT2 nyomaték negatív, akkor a motort fékezni kell, ezért jelenik meg az összefüggésben külön összetevőként.
|
| ||
|
|
A képletekben felismerhető a golyósorsó h/2π átalakítási tényezője, valamint a hajtómű „i” módosítása. Az ezres osztó azért szerepel, mert az orsó menetemelkedését a katalógusok mm-ben adják meg.
Állandó sebesség mellett (stacionárius állapot) a motor teljesítménye:
|
|
A modellezés során keresztváltozóként „Ω” szögsebességet használunk, de a katalógusokban „n” fordulatszám szerepel. Ezért szükséges az átszámítás.
Motorválasztás szempontjából érdekes lehet stacionárius állapotban az asztal előírt „v” végsebessége, és az ehhez szükséges motor fordulatszám is:
|
|

A motor szögsebességére állandósult állapotban, illetve, ha a hajtómű rugómerevsége nagy, felírható, hogy
|
|

Ezt az összefüggést a későbbiekben is felhasználjuk.
Az asztal a hajtómű kimeneti oldalán van, ezért kell a módosítást figyelembe venni. A golyósorsó (váltó) átalakítási tényezője a transzlációs sebesség átszámításához szükséges, a 103 szorzó pedig azért jelenik meg, mert „h” mm-ben, „v” pedig m/s dimenzióban lesz megadva.
A motor szükséges nyomatékának meghatározása gyorsítás esetén
A motorral szemben támasztott összes nyomaték igény, amely gyorsítás esetén felléphet, az alábbi összetevőkből adódik:
|
|
A számításhoz felhasználjuk az előzőekben meghatározott M0 üresjárati nyomatékot. Ebben már benne foglaltatik az egyenes vezetékeken fellépő súrlódó erő, de a képletben nem feledkeztünk el az orsó csapágyainak MS súrlódási nyomatékáról sem.
Következő lépésben a gyorsítandó rendszerre ható MTa terhelő nyomatékot kell meghatározni, amelyben az előtolás szükséges (tervezett, előírt) erőértékét és a tervezett gyorsító erőt kell figyelembe venni:
|
|
A nyomaték, amely a teljes pozícionáló rendszer eredő tehetetlenségi nyomatékát gyorsítja, kétféle módon határozható meg. Egyrészt az előírt gyorsítási úthossz és a gyorsításhoz szükséges idő segítségével, másrészt a motor fordulatszámának felhasználásával, ha a névleges fordulatszámra kívánunk gyorsítani.
Ha a terhelési oldalon, tehát a hajtómű kimeneti oldalán előírt az asztal gyorsítási úthossza és az ehhez szükséges idő, akkor az alábbi összefüggések írható fel, ΩM=Ω1 feltételezéssel:
|
|
Ahol „J” a motor oldalára redukált eredő és egyenértékű tehetetlenségi nyomaték, „Ω1” a hajtómű bemenő szögsebessége, ami azonos a motor szögsebességével. Mindkét esetben figyelembe kell venni a motorhoz csatlakoztatott hajtómű hatásfokát is.
|
|

Észre kell venni azt is, hogy a „Nm” dimenzió helyes, annak ellenére, hogy a gyorsítási úthosszat „mm”-ben adjuk meg. Ezt kompenzálja a menetemelkedés, amely ugyancsak „mm”-ben lesz behelyettesítve. Ettől kezdve csak az sa/h arány számít.
Ha a motor szögsebessége helyére a hajtómű kimeneti oldali „Ω2” szögsebességét helyettesítjük, majd ezt a szögsebességet a golyósorsó (váltó) átalakítási tényezőjével sebességgé számítjuk át, akkor alábbi összefüggés már a gyorsítási úthossz és a gyorsítási idő függvényében szolgáltatja a szükséges nyomaték értékét.
A gyorsítás után elért motor fordulatszám, ha a hajtómű kimeneti oldalán elért úthosszat vesszük alapul, egy hosszabb átszámítás után adódik:
|
|

Ha viszont a motor teljes „kivezérlési” tartománya érdekes, tehát zérus fordulatszámról a lehető legnagyobb értékig, a névleges fordulatszámig kívánjuk gyorsítani a motort az adott terhelésekkel, akkor a következő összefüggést kell alkalmazni:
|
|
A képletekben előforduló „J” eredő tehetetlenségi nyomaték összetevői a modell gráfja segítségével érthetők meg.
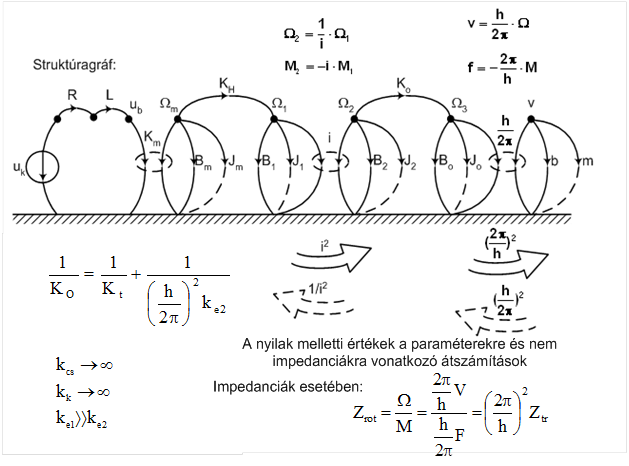
Az eredő tehetetlenségi nyomatékot a motor „felől nézve” kell meghatározni, hiszen a motor kiválasztásáról van szó. Így az eredőben a motor saját tehetetlenségi nyomatéka és a hajtómű bemeneti oldali tehetetlenségi nyomatéka összeadható, de a hajtómű kimeneti oldalán szereplő tehetetlenségeket már csak a redukálás szabályai szerint adhatjuk ezekhez hozzá, nem beszélve arról, hogy az egyenes vonalon mozgatott tömeg tehetetlenségi nyomaték egyenértékét a golyósorsó átalakítási tényezőjének felhasználásával kell meghatározni.
|
|
Az előző ábrán a redukció (átszámítás) irányokat és értékeket feltüntettük. Az átszámítás elméleti hátterét a modellezés alapelveivel foglalkozó fejezetben találhatjuk meg.
Hátra van még a szükséges motorteljesítmény meghatározása.
Ezt egyrészt hagyományos módon adhatjuk meg, ha előírt a mozgatott tömeg (asztal) „v” végsebessége, és az ehhez a sebességhez kiszámított motor fordulatszám:
|
|
A motorteljesítmény meghatározásánál figyelembe vettük a súrlódásokból eredő veszteségeket, ld.: FS és MS a megfelelő képletekben.
A súrlódási nyomatékokat (erőket) vagy tapasztalati adatok segítségével becsülhetjük, vagy mérésekkel határozzuk meg. Ha szükség van az eredő veszteség különálló becslésére is, akkor azt az alábbi formula segítségével lehet megtenni:
|
|
Az összefüggésben „B” a motor „felől” látható eredő súrlódási tényező. Kiszámítása a tehetetlenségi nyomatékhoz hasonlóan, redukálással történik:
|
|
A fenti képletben látható csillapítási tényezők megtalálhatók a gráfban. Az orsó csapágyazásaiból eredő csillapítási tényező BO jelölést kapott.
11.2. Golyósorsós szakaszok matematikai modelljei
A megfelelő teljesítményű és fordulatszámú motor, valamint a hajtómű kiválasztása után megalkotható a teljes szakasz dinamikai (matematikai) modellje.
Ez a modell első közelítésben állandó paramétereket alkalmaz, tehát nem veszi figyelembe azt, hogy az orsó rugómerevsége függ a mozgatott tömeg orsóhoz képesti helyzetétől, és azt sem, hogy a súrlódások nem függetlenek a sebességtől és a szögsebességtől.
Ezt a linearizált rendszert látjuk a 11.2. ábra gráfján.
A tervezés második lépésében meghatározzuk a golyósorsós rész átviteli függvényét. Kiindulásként ismét a teljes rendszert tekintjük. Az impedancia hálózatban a legáltalánosabb rendszert rajzoltuk meg, mert a leegyszerűsítés után akkor is ugyanazt a kapcsolást kapjuk, ha figyelembe vesszük a csapágyazások és a keret rugómerevségét, és akkor is, ha nem, de természetesen az eredő paraméter értékek eltérőek. Ennek igazolását a 9. fejezet fejezetben találjuk. Természetes, hogy a belső impedanciák eltérőek, mert az ezeket alkotó impedanciák is eltérnek. Ezt a tervezésnél figyelembe kell majd venni, mert más rezonancia frekvencia és más csillapítási fok adódik.
A két soros eredő impedancia két-két soros rugómerevségből származik. A „ke1” a keret és a csapágy soros eredője, „ke2” pedig az orsó effektív és az anya rugómerevségének ugyancsak soros eredői.
|
|
Megjegyezzük, hogy a 9. fejezet fejezetben leírtaknak megfelelően a „ke1” rugómerevséget csak különleges esetekben célszerű figyelembe venni, akkor, ha a keret és a csapágyak rugómerevsége a rezonancia frekvenciát lényegesen befolyásolja. A mintaszámításban ezt a rugómerevséget is szerepeltettük, hiszen a modell struktúráját nem befolyásolja.
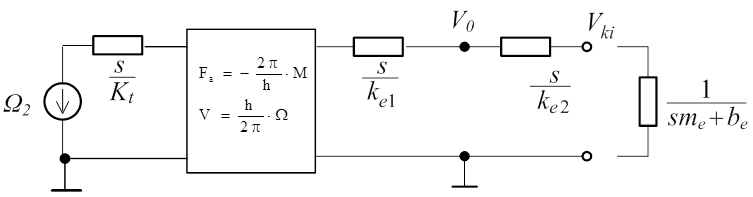
A baloldali forgó mechanikai építőelemeket átszámítjuk a jobboldalra, mert a kimenő mennyiség a sebesség, a golyósorsó által mozgatott asztal (tömeg) szögsebessége. Az átszámított forrás a következő képletben látható, ez a hajtómű kimenetére számított egyenértékű „sebesség”, a golyósorsó átalakítási tényezőjének ismeretében:
|
|

A tengelykapcsoló impedanciájának átszámítása ugyancsak a redukcióként ismeretes módszerrel történik. Ennek módszere a modellezéssel foglalkozó bevezető fejezetekben megtalálható.
|
|
Az átszámítás után kapott kapcsolás egyszerűbb. A következő feladat a Vki változóhoz tartozó „passzív” rész leválasztása, és a forrásból, valamint a visszamaradó impedanciákból egy Thevenin kapcsolás létrehozása. Ezt követően átviteli függvény gyanánt már csak a keresztváltozó osztót kell felírni. Már jeleztük, hogy az osztó formája nem változik akkor, ha a referenciához kötött eredő impedanciát kiiktatjuk, csak az un. belső impedancia számítása történik más módon.
Ha a csapágy és a keret rugalmasságát is figyelembe kívánjuk venni a tervezésnél, akkor a szabad kapcsok „felől” látható Zb belső impedancia az alábbi lesz:
|
|
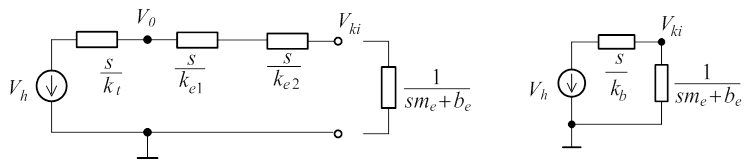
Az átviteli függvény ismét egy keresztváltozó osztóval határozható meg:
|
|
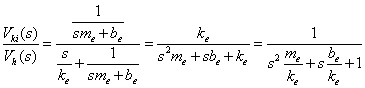
Az eredeti bemenet a hajtómű kimeneti oldali szögsebessége, ezért ennek behelyettesítésével kapjuk a keresett átviteli függvényt, ha a kimenet az anya (asztal) sebessége:
|
|
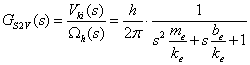
Ha a kimenet az asztal pozíciója, akkor az átviteli függvény nevezőjében megjelenik az „s” operátor szorzóként:
|
|
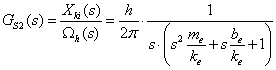
Elsőrendű motor és hajtómű egységgel
A szakasz átviteli függvénye a motor-hajtómű egység és a golyósorsós átalakító sorosan kapcsolt két átviteli függvényéből adódik:
|
|
Az így meghatározott átviteli függvény egy negyedrendű arányos tagot reprezentál, a szabályozástechnikában szokásos alak az alábbi:
|
|
A 16. fejezet fejezetben ezt a szakasz átviteli függvényt használjuk fel a szabályozás tervezéséhez.
Harmadrendű motor és hajtómű egységgel
A szakasz eredő átviteli függvényében G2(s) változatlan az első modellhez képest, hiszen igazoltuk, hogy golyósorsós átalakító átviteli függvényének rendszáma kettő, függetlenül a figyelembe veendő rugómerevségektől. Így azután a második változatban a szakasz átviteli függvénye kompakt alakban az alábbi lesz:
|
|
|
| ||
|
| ||
|
| ||
|
|


A szakasz tehát hatodrendű, látjuk, hogy As az első változathoz viszonyítva csak „alakra” módosult, mert az első változatban Be csillapítási tényező alatt mást értettünk. Emlékeztetőül megjelenítjük az első változat eredő csillapítási tényezőjét és eredő tehetetlenségi nyomatékát:
|
|

Ha most a második változat eredő csillapítását kibontjuk, és összevetjük a fent látható első változattal, meggyőződhetünk, hogy nincsen változás:
|
|

Nem is lehet változás, mert a csillapítási tényezőkön és elhelyezkedésükön nem változtatunk.
Érdemes a szabályozókör tervezéséhez a szakasz átviteli függvényét a fentebb látható formában meghagyni, hiszen könnyebb a szabályozó illesztése.
Negyedrendű motor és hajtómű egységgel
A szakasz eredő átviteli függvénye felírásához G1 kiegészül a változatlan G2-vel, és végső soron két szorzatra bontható hetedrendű (!) rendszert kapunk:
|
|
|
| ||
|
| ||
|
| ||
|
| ||
|
|


Ha a G1 rész együtthatói a tervezési követelmények miatt kötöttek, akkor érdemes a rendelkezésre álló adatok behelyettesítésével a paraméteres formáról áttérni a konkrét szám-együtthatós alakra.
A nevező összeszorzása most sem célszerű, de ha olyan számítógépes szimulációs program áll rendelkezésre, amely n-edrendű átviteli függvény Bode diagramjának megszerkesztésére alkalmas, akkor az összeszorzást érdemes programmal elvégeztetni.
Szakirodalom
[11.1.] www.boschrexroth.com pl.: Linearscklitten, Berechnung (golyósorsós szán, számítások).
[11.2.] Werkzeugmaschinen Bd.3. VDI Verlag. Düsseldorf . 1995.
12. fejezet - Fogazott szíjas lineáris mozgató, mint szakasz méretezése
A fogazott szíjas átalakító annyira alapvető rendszer a mechatronikában, hogy a vonóelemes szakaszok közül csak ezzel foglalkozunk részletesen. Az ilyen típusú átalakítót tartalmazó szabályozott szakaszt is nagy körültekintéssel kell tervezni, mint a pontossági, mind pedig a dinamikai követelmények miatt.
A fogazott szíjas átalakító tervezésének és méretezésének legfontosabb szempontjait részben Dr.-Ing. Thomas Nagel a BME MOGI Tanszéken több szemeszterben tartott vendégelőadásainak anyagára támaszkodva foglaltuk össze, de a modellezés szempontjai szerint kiegészítettük azt. A szerző az említett oktatóval együtt fejlesztett és rendszeresen cserélt oktatási anyagokat. Dr. Nagel hosszabb idő óta, minden év szeptemberében, Drezdában, nagy érdeklődés mellet szervezi meg a fogazott szíjas hajtásokkal foglalkozó fontos szakmai konferenciát, amelyen német gyártók mellett valamennyi mértékadó európai gyártó cég képviselői megjelennek. A fogazott szíjas hajtásokkal kapcsolatos kutatásainak eredményeit Dr. Nagel a „Zahnriemengetriebe” címmel, [10.1.] 2008-ban megjelent munkájában foglalta össze.
12.1. A fogazott szíjas lineáris mozgatók felépítése
A fogazott szíjas lineáris mozgatók több változatban készülnek, amint a következő ábrán látható:
![Fogazott szíjas lineáris mozgatók legismertebb elrendezései [10.1.]](images/image_XII_1.png)
A fogazott szíjas átalakítót a gépészet, járműipar és a mechatronika, ezen belül különösen a robottechnika és elektronikai szerelő automaták területén egyre kiterjedtebben alkalmazzák, köszönhetően azoknak a fejlesztési eredményeknek, amelyek főként a 2000. év után lettek átültetve az ipari gyakorlatba. A legfontosabb irány jelenleg az élettartam és a megbízhatóság növelése, ami különösen a járműipar számára kulcsfontosságú. A következő táblázatban rövid, szemelvényes áttekintést adunk a fogazott szíjas átalakító alkalmazási területeiről, ötletadás céljából.
A fogazott szíjas lineáris mozgató rendszerint két egységből áll, egy motor és hajtómű egységből és a fogazott szíjas mozgás-átalakítóból, ahogy a következő ábra mutatja:
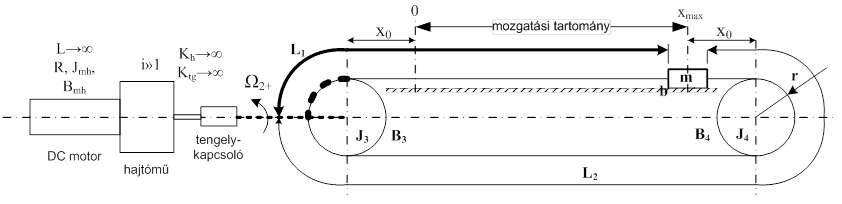
Azokat a jelöléseket, hogy Kh→∞ és Ktg→∞ a fogazott szíjas átalakító rugómerevségéhez viszonyítva kell értelmezni. A hajtómű eredő rugómerevsége és a tengelykapcsoló rugómerevsége ezek szerint lényegesen nagyobb, mint a fogazott szíjé. Dinamikai szempontból a rendszert külön, a 12.5. szakasz fejezetben vizsgáljuk részletesen, annak függvényében, hogy a motor-hajtómű egység visszahatásmentesen szétválasztja két soros tagra a rendszert, vagy a teljes struktúra csak egyetlen, összefüggő rendszerként modellezhető.
Tervezési szempontból a fogazott szíjas pozícionáló (lineáris mozgató) dinamikai és pontossági szempontból legfontosabb része a fogazott szíj.
A különféle, jelenleg kereskedelemben kapható fogprofilokról ugyancsak közlünk tájékoztatást.
|
Fogosztás [mm] |
~2 |
~5 |
~10 |
~20 | |
|---|---|---|---|---|---|
|
Példák szabványos profilokra |
Átlagos trapézprofil |
T2; T5; MXL; |
T5; XL |
T10; AT10; L; H |
T20; AT20; XH |
|
Nagyteljesítményű profilok 1. |
HTD3M; S2M; S3M |
HTD5M; S5M |
HTD8M; S8; S8M |
HTD14M; HTD20M; S14M | |
|
Nagyteljesítményű profilok 2. |
AT3 |
AT5 |
AT10 |
AT20 | |
|
Nagyteljesítményű profilok 3. |
GT3M; RPP3 |
GT5M; RPP5 |
GT8M; RPP8 |
GT14M; RPP14 | |
|
Hajtókerék fordulatszám [1/min] |
<40 000 |
<40 000 |
<15 000 |
<6 000 | |
|
Szíjsebesség [m/s] |
<80 |
<80 |
<60 |
<40 | |
|
Tárcsa minimális fogszáma |
>10 |
>10 |
>12 |
>15 | |
|
Átvihető teljesítmény [W] |
<1 |
<5 |
<60 |
<220 | |
|
Alkalmazás |
Miniatűr hajtások Nyomtatók Plotterek Vezérlőművek Háztartási gépek |
Pozícionálók Szerszámgépek Robotok Textilgépek Háztartási gépek |
Pozícionálók Építőgépek Szivattyúk, sűrítők Robotok Faipari gépek |
Építőipari gépek Malmok Fafeldolgozó gépek Nehézgépek | |
Szakmai körökben ismert, hogy néhány kifejezetten nagy teljesítményre kialakított fogprofiltól eltekintve, nem a fogprofil, hanem a fogtávolság és a szíj szélessége mérvadó az átvihető teljesítmény tekintetében. Újabban nem csak nyomatékátvitel a fogazott szíj feladata, hanem a lineáris mozgatókban a pozícionálás. Amíg a merevítő szálak rendszere és a szíj anyaga nem volt a maihoz hasonló, ilyen precíziós feladatok céljára fogazott szíjat nem alkalmaztak. Ma már egy plotter, egy nyomtató, tömegcikk, és az ár alacsony szinten tartása érdekében elképzelhetetlen fogazott szíjak alkalmazása nélkül.
A fenti táblázat első sorában megjelennek a szabványos fogprofilok. A könnyebb áttekinthetőség érdekében, a következőkben nézzünk néhányat ezek közül:
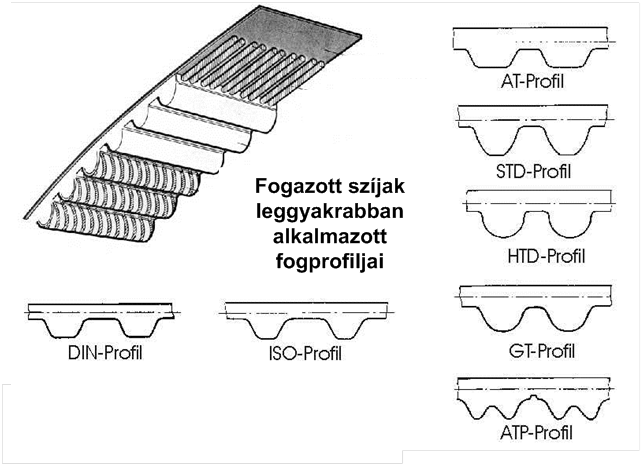
A fogazott szíjas hajtást a speciális tulajdonságai miatt egyebek mellett, tervezni kell élettartamra és pozícionálási pontosságra is.
12.2. Fogazott szíj méretezésének lépései
A napjainkban kínált fogazott szíj gyártmányok esetében a tervezőnek bizonyos mértékig meg van kötve a keze. A korlátozás legfőbb okai a kereskedelemben kínált szíjak anyaga, a fogprofil, a fogosztás és a szíjhossz. Amint a későbbiekben látni fogjuk, például a szíj rugómerevségének beállítására egyedül a szélesség ad bizonyos mozgásteret.
A fenti áttekintő táblázatban látjuk, hogy milyen teljesítmény igényre milyen fogprofil és fogosztás ajánlott. A gyártók ismertetői természetesen ennél az áttekintésnél lényegesen bővebbek, ez a táblázat csak az összehasonlítás kedvéért készült.
A tervező számára nyolc pontban összefoglaltuk a fogazott szíjas hajtás tervezési lépéseit. Természetesen lehetséges ezektől eltérni, de nem ajánlott.
Fogazott szíj anyagának kiválasztása a működési feltételek figyelembe vételével
Fogazás profil kiválasztása (profiltól függő tulajdonságok, ár, beszerezhetőség)
Fogtávolság meghatározása a teljesítmény átvitel függvényében
A hajtás geometriájának meghatározása (fogszámok, tengelytávolságok, hajlítási ívek, szükséges szíjhosszúság)
A kínálati szíjhosszúság ellenőrzése (katalógusok)
A hajtás geometriájának átszámítása, a gyártott szíjhosszak figyelembevételével
A szükséges szíjszélesség kiszámítása
A legközelebb eső standard szélességű és hosszúságú szíj kiválasztása
A tervezés tehát többszörös iterációs folyamat, és feltételezi a tervező rugalmas hozzáállását, mind az elrendezés, mind a szíjhossz és a tárcsaátmérők tekintetében. A tárcsák átmérője és szélessége sem tetszőlegesen választható jellemző, e tekintetben is igazodni kell a kínálathoz. A megfelelő szíj kiválasztásában hathatós segítséget nyújt a Drezdai Műszaki Egyetem Finommechanikai és Elektronikai Design Tanszéke (Technische Universität Dresden, Institut für Feinwerktechnik und Elektronik Design) által kidolgozott programcsomag. E program tanuló verziója az Interneten ingyenesen elérhető, tervezéssel foglalkozó cégek részére pedig természetesen bővebb verziókat is kínálnak, német és angol nyelvű utasításokkal. A tervező program a www.eassistant.eu honlapon érhető el. A következő képpel a program ügyes használhatóságát akartuk alátámasztani. Amint látható, a fogazott szíjas hajtás 2D-s modellje a koordinátarendszer segítségével méretarányosan elkészíthető. A programban beállítható a tervező által elképzelt teljesítmény igény és a fogprofil, a rendszer megadja az alkalmas szíj típusát, a fogtávolságot. Az elképzelt elrendezéshez megadja a legközelebbi gyártott szíjhosszat. Be kell állítani a fogazott tárcsák fogszámát, és kiadódnak a hatásos tárcsa átmérők. A program ügyel arra, hogy adott anyagú, fogprofilú és fogtávolságú szíjhoz milyen átmérőjű fogazott tárcsa rendelhető. A szíjak élettartamát nagymértékben csökkentheti az, ha a szíj merevségéhez viszonyítottan kis tárcsaátmérő miatt csökken a hajlítási sugár, és ezzel nő a szíj hajlító igénybevétele.
![Korszerű program fogazott szíjas mozgatás tervezéséhez [12.1.]](images/image_XII_4.png)
A csapágyak méretezéséhez szükség van az előfeszítő erő figyelembe vételére. A fogazott szíjas mozgatás minőségének egyik – sok esetben döntő – kritériuma a szíjfeszesség beállítása. A következőkben készítettünk egy összeállítást, amelyből kitűnik, hogy ez a kérdés igen ellentmondásos.
Előfeszítő erő beállítása
|
Előfeszítő erő kicsi |
Előfeszítő erő nagy |
|---|---|
|
Szíjfog átugorhat egy tárcsafogat |
Zajemisszió növekedése |
|
Élettartam csökkenés a tárcsa- és szíjfogak közötti súrlódások növekedése miatt |
Élettartam csökkenés a túlzott húzó igénybevétel, a szíj túlfeszítése miatt, |
|
Zajemisszió növekedése |
Növekvő csapágyterhelés |
|
Csökkenő pozícionálási pontosság |
Élettartam csökkenés a megnövelt hajlító igénybevétel miatt |
|
De: Csökkenő csapágyterhelés |
De: Nincs fogátugrás |
A szíj és fogazott tárcsa közötti kapcsolatot igen jól szemlélteti a következő két kép, amely Dr. T. Nagel előadási anyagából származik. A baloldali kép egy „laza” szíjat mutat, az előfeszítő erő az előírásosnak a fele. A jobboldali képen egy 50%-kal túlfeszített szíj kapcsolódását látjuk. Amíg a laza szíj a kapcsolódás és elválás során ismétlődő dörzshatások az élettartam csökkenéséhez vezethet, és rontja a pozícionálási pontosságot, addig a túlzottan feszes állapot a szíjfogak deformációját, és a csapágyak túlterhelését eredményezi. A szíjfogak deformációja ugyancsak pozícionálási hibaként jelentkezik.
![Az előfeszítés hatása a fogazott tárcsánál [10.1.]](images/image_XII_5.png)
A szíj feszessége nem csak a fogak deformációján keresztül befolyásolja a rendszer pozícionálási pontosságát, hanem a szíj és a fogazott tárcsa közötti kapcsolódás ívével, a szíj tárcsára való felfekvésével is. Ugyancsak Dr. T. Nagel anyagából származik az a diagram, amelyet a 10.4. szakasz fejezetben találunk, és amely az előfeszítő erő és a terhelés nagyságának függvényében mutatja felfekvési ív és az ideális felfekvési rádiusz közötti eltéréssel összefüggésben lévő pozícionálási hiba nagyságát.
12.3. A motor kiválasztása
A lineáris mozgatóhoz szükséges motor és hajtómű egység kiválasztásához a golyósorsóhoz hasonlóan szükség van a rendszer gráfjára, vagy impedancia hálózatára annak érdekében, hogy a szükséges teljesítményt és fordulatszámot megállapíthassuk.
A gráfon a motor-hajtómű egység és a fogazott szíjas mozgató külön van választva, ami azt jelenti, hogy a hajtómű módosítása elegendően nagy a visszahatás mentesség biztosítására. A motorteljesítmény megállapításához valójában mindegy, hogy van-e visszahatás, mert a szükséges mértékű tartalékok biztosítására a teljes rendszer motor „felől” nézett eredő tehetetlenségi nyomatékára szükség van.
A méretezéshez szükséges mennyiségek jelölését és mértékegységüket az alábbiakban adjuk meg:
|
m |
[kg] |
mozgatott tömeg | |
|
b |
[Ns/m] |
egyenes vezeték csillapítási tényezője | |
|
i |
hajtómű módosítása (i˃1: lassítás) | ||
|
r |
[mm] |
a tárcsák sugara (pozícionálónál mindkét sugár azonos értékű) | |
|
ke |
[N/m] |
a fogazott szíj eredő rugómerevsége | |
|
F |
[N] |
előtoló erő (tervezett, igényelt) | |
|
Fs |
[N] |
egyenes vezetéken fellépő súrlódási erő | |
|
Fa |
[N] |
gyorsító erő | |
|
M0 |
[Nm] |
üresjárati nyomaték | |
|
MT1 |
[Nm] |
terhelő nyomaték állandó sebességű emelésnél (függőleges elrendezésnél) | |
|
MT2 |
[Nm] |
terhelő nyomaték állandó sebességű süllyedésnél (függőleges elrendezésnél) | |
|
MS |
[Nm] |
a teljes rendszer eredő súrlódási nyomatéka (számítást ld. külön) | |
|
MSH |
[Nm] |
hajtómű eredő súrlódó nyomatéka | |
|
MM |
[Nm] |
motor hajtó (villamos) nyomatéka | |
|
MTa |
[Nm] |
terhelő nyomaték gyorsításnál | |
|
Ma |
[Nm] |
gyorsító nyomaték | |
|
MMa |
[Nm] |
motor hajtónyomaték gyorsításnál | |
|
Jm |
[kgm2] |
motor forgórész tehetetlenségi nyomatéka | |
|
Jmr |
[kgm2] |
a mozgatott tömeg átszámított tehetetlenségi nyomatéka | |
|
J |
[kgm2] |
tehetetlenségi nyomaték | |
|
J0,1 |
[kgm2] |
hajtómű bemeneti és kimeneti oldali tehetetlenségi nyomatéka | |
|
B1,2 |
[Nms/r] |
hajtómű bemeneti és kimeneti oldali csillapítási tényezői | |
|
J1,2 |
[kgm2] |
hajtó és hajtott tárcsák tehetetlenségi nyomatéka | |
|
Pm |
[W] |
motor teljesítmény konstans sebességnél | |
|
Pma |
[W] |
motor teljesítmény gyorsításnál | |
|
sa |
[mm] |
gyorsítási úthossz | |
|
ta |
[s] |
gyorsítási idő | |
|
v |
[m/s] |
mozgatás sebessége, azaz az asztal előírt végsebessége | |
|
nM |
[1/min] |
motor fordulatszám | |
|
η |
hajtómű hatásfoka (katalógus) | ||
|
η1 |
fogazott szíjas átalakító hatásfoka emelésnél | ||
|
η2 |
fogazott szíjas átalakító hatásfoka süllyedésnél |
A motor szükséges nyomatékának meghatározása állandó fordulatszám esetén
A motor hajtónyomatékának meghatározásához az alábbi összetevők szükségesek. Ha a vonóelemes pozícionálót függőleges helyzetben is üzemeltetni kell, akkor figyelembe kell venni, hogy süllyesztésnél az MT2 nyomaték negatív, akkor a motort fékezni kell, ezért jelenik meg az összefüggésben külön összetevőként.
|
| ||
|
|
A képletekben felismerhető a vonóelemes átalakító „r” átalakítási tényezője, valamint a hajtómű „i” módosítása. Az ezres osztó azért szerepel, mert a fogazott tárcsa sugarát mm-ben adjuk meg.
Állandó sebesség mellett (stacionárius állapot) a motor teljesítménye:
|
|
A modellezés során keresztváltozóként „Ω” szögsebességet használunk, de a motor katalógusokban „n” fordulatszám szerepel. Ezért szükséges az átszámítás.
Motorválasztás szempontjából érdekes lehet stacionárius állapotban vonóelemes átalakítóval mozgatott tömeg (asztal) előírt „v” végsebessége, és az ehhez szükséges motor fordulatszám is:
|
|

A motor szögsebességére állandósult állapotban, illetve, ha a hajtómű rugómerevsége nagy, felírható, hogy
|
|

Ezt az összefüggést a későbbiekben is felhasználjuk.
A mozgatott tömeg a hajtómű kimeneti oldalán van, ezért kell a módosítást figyelembe venni. A vonóelemes átalakító „r” átalakítási tényezője a transzlációs sebesség átszámításához szükséges, a 103 szorzó pedig azért jelenik meg, mert „r” mm-ben, „v” pedig m/s dimenzióban lesz megadva.
A motor szükséges nyomatékának meghatározása gyorsítás esetén
A motorral szemben támasztott összes nyomaték igény, amely gyorsítás esetén felléphet, az alábbi összetevőkből adódik:
|
|
A számításhoz felhasználjuk az előzőekben meghatározott M0 üresjárati nyomatékot. Ebben már benne foglaltatik az egyenes vezetékeken fellépő súrlódó erő, de a képletben nem feledkeztünk el a csapágyazások súrlódási nyomatékáról sem.
Következő lépésben a gyorsítandó rendszerre ható MTa terhelő nyomatékot kell meghatározni, amelyben az előtolás szükséges (tervezett, előírt) erőértékét és a tervezett gyorsító erőt kell figyelembe venni:
|
|
A nyomaték, amely a teljes vonóelemes pozícionáló rendszer eredő tehetetlenségi nyomatékát gyorsítja, kétféle módon határozható meg. Egyrészt az előírt gyorsítási úthossz és a gyorsításhoz szükséges idő segítségével, másrészt a motor fordulatszámának felhasználásával, ha a névleges fordulatszámra kívánunk gyorsítani.
Ha a terhelési oldalon, tehát a hajtómű kimeneti oldalán előírt az asztal gyorsítási úthossza és az ehhez szükséges idő, akkor az alábbi összefüggések írható fel, ΩM=Ω1 feltételezéssel:
|
|
Ahol „J” a motor oldalára redukált eredő és egyenértékű tehetetlenségi nyomaték, „Ω1” a hajtómű bemenő szögsebessége, ami azonos a motor szögsebességével. Mindkét esetben figyelembe kell venni a motorhoz csatlakoztatott hajtómű hatásfokát is.
|
|

Észre kell venni azt is, hogy a „Nm” dimenzió helyes, annak ellenére, hogy a gyorsítási úthosszat „mm”-ben adjuk meg. Ezt kompenzálja a hajtó (hajtott) tárcsa „r” sugara, amely ugyancsak „mm”-ben lesz behelyettesítve. Ettől kezdve csak az sa/r arány számít.
Ha a motor szögsebessége helyére a hajtómű kimeneti oldali „Ω2” szögsebességét helyettesítjük, majd ezt a szögsebességet a golyósorsó (váltó) átalakítási tényezőjével sebességgé számítjuk át, akkor alábbi összefüggés már a gyorsítási úthossz és a gyorsítási idő függvényében szolgáltatja a szükséges nyomaték értékét.
A gyorsítás után elért motor fordulatszám, ha a hajtómű kimeneti oldalán elért úthosszat vesszük alapul, egy hosszabb átszámítás után adódik:
|
|

Ha viszont a motor teljes „kivezérlési” tartománya érdekes, tehát zérus fordulatszámról a lehető legnagyobb értékig, a névleges fordulatszámig kívánjuk gyorsítani a motort az adott terhelésekkel, akkor a következő összefüggést kell alkalmazni:
|
|
A képletekben előforduló „J” eredő tehetetlenségi nyomaték összetevői a modell gráfja segítségével érthetők meg.

Az eredő tehetetlenségi nyomatékot a motor „felől nézve” kell meghatározni, hiszen a motor kiválasztásáról van szó. Így az eredőben a motor saját tehetetlenségi nyomatéka és a hajtómű bemeneti oldali tehetetlenségi nyomatéka összeadható, de a hajtómű kimeneti oldalán szereplő tehetetlenségeket már csak a redukálás szabályai szerint adhatjuk ezekhez hozzá, nem beszélve arról, hogy az egyenes vonalon mozgatott tömeg tehetetlenségi nyomaték egyenértékét a golyósorsó átalakítási tényezőjének felhasználásával kell meghatározni.
|
|
Az átszámítás (és a redukció) elméleti hátterét a modellezés alapelveivel foglalkozó fejezetben találhatjuk meg.
Hátra van még a szükséges motorteljesítmény meghatározása.
Ezt egyrészt hagyományos módon adhatjuk meg, ha előírt a fogazott szíjjal mozgatott tömeg (asztal) „v” végsebessége, és az ehhez a sebességhez kiszámított motor fordulatszám:
|
|
A motorteljesítmény meghatározásánál figyelembe vettük a súrlódásokból eredő veszteségeket, ld.: FS és MS a megfelelő képletekben.
A súrlódási nyomatékokat (erőket) vagy tapasztalati adatok segítségével becsülhetjük, vagy mérésekkel határozzuk meg. Ha szükség van az eredő veszteség különálló becslésére is, akkor azt az alábbi formula segítségével lehet megtenni:
|
|
Az összefüggésben „B” a motor „felől” látható eredő súrlódási tényező. Kiszámítása a tehetetlenségi nyomatékhoz hasonlóan, összevonással és redukálással történik:
|
|
A fenti képletben látható csillapítási tényezők megtalálhatók a gráfban. Az egyenes vezetéken mozgatott tömeg lineáris csapágyazásaiból eredő csillapítási tényező „b” jelölést kapott.
12.4. Fogazott szíjas pozícionálás pontossága
Amint a golyósorsós mozgatók esetében az eredő rugalmasság és a súrlódások befolyásolják a pozícionálási pontosságot, úgy a fogazott szíjas átalakító esetében is fel kell térképeznünk, hogy melyik tényező milyen mértékben van hatással a pontosságra.
Első lépésben definiáljuk a pozícionálás hibáit, és azokat a jellemzőket, amelyeket a méréselmélet és a valószínűségszámítás segítségével lehet meghatározni. A számításokhoz szükséges adatokhoz alapvetően egy elkészült pozícionáló rendszer méréstechnikai vizsgálatával juthatunk. Ugyanakkor táblázatos formában összefoglaltuk a pozícionálási hiba forrásait, hogy a tervezés és méretezés fázisában is mód nyíljon ezek figyelembe vételére.
|
Hiba ok |
Jellemző |
Az eltérés számításához szükséges adatok, ismeretek |
Eltérés |
|---|---|---|---|
|
Terhelt szíjág nyúlása Δxsz |
Szíjág merevség Szíjág merevség ingadozás |
Specifikus szíjág-merevség ks Szíjág hossza L1,2 és szélessége h |
|
|
Fogrugalmasság okozta deformáció a kapcsolódási íven ΔxF |
Kapcsolódási ív eredő fogrugalmassága Fogosztás eltérés esetén a szíj radiális irányú rugómerevsége |
Specifikus fogmerevség kSF Aktív szíjfogak száma zK Szíj szélesség h Szíjág merevség Tárcsa és szíj fogosztása közötti eltérés |
|
|
Áttétel ingadozásából származó hiba ΔxfR Tárcsa excentricitásból eredő hiba Δxex |
Fogazott kerék sugarának ingadozása A feszített szíj osztásának ingadozása |
Fogazott kerék alakhibája fR1, fR2 körfutási hibák Csapágyazás hibája Excentricitás |
|

A táblázatban alkalmazott jelölések magyarázata a következő:
|
kFS |
[N/mm2] |
Specifikus fogmerevség (egy fogra), N/mm a szíjszélesség 1 milliméterére vonatkoztatva | |
|
kS |
[N/mm2] |
Specifikus szíjmerevség, N/mm a szíjszélesség 1 milliméterére vonatkoztatva | |
|
z |
Tárcsa fogszáma | ||
|
d |
[mm] |
Tárcsa átmérője | |
|
zK |
Szíj tárcsával kapcsolódó fogainak száma | ||
|
p |
[mm] |
Szíj névleges fogtávolsága | |
|
pF |
[mm] |
Feszített szíj nyújtott fogtávolsága | |
|
Fsz |
[N] |
Szíjágban ébredő erő | |
|
h |
[mm] |
Szíj szélessége | |
|
Lk |
[mm] |
Kapcsolódó (fogakkal) szíjhossz | |
|
fR |
[mm] |
Tárcsa sugarának hibája | |
|
e |
Tárcsa excentricitása | ||
|
x |
[mm] |
Mozgatási hossz | |
|
φ |
[°] |
A tárcsa szögelfordulása |
|
| ||
|
| ||
|
|
ΔLmax=0,2 mm/m, értéke függ a gyártmánytól és a szíjfeszítéstől |


![A szíj fogazott kerékre való felfekvéséből származó hiba [10.1]](images/image_XII_7.png)
Az áttétel hibája is kiszámítható, ez egyenes vonalú (transzlációs) hiba formájában jelenik meg. A feszített fogazott szíjas átalakító ΔxP szíjfeszítés miatti hosszváltozás tűrése lineáris mozgatás és ΔpF értékkel megnyújtott fogosztás esetén:
|
|
A szíjág megnyúlása ismert ΔFSZ nagyságú szíjfeszítő erő esetén:
|
|
A táblázatban összefoglalt pozícionálási hibaokozók között a második sorban szerepel a húzott fogazott szíj tárcsán való felfekvésének ideális helyzettől való eltérése. A következő ábrán gyakorlati mérési adatokat láthatunk, amely a különböző terhelési százalékok függvényében a szíj sugárirányú helyzete és az ideális felfekvési sugár közötti hibát szemlélteti.
A pozícionálás maximális abszolút hibája [12.2.]
A maximális abszolút hiba a legkedvezőtlenebb esetet felételezi, amikor is minden rész-hiba abszolút értékét összeadjuk. Kétségtelen tény, hogy ezek a hibák egyszerre jelennek meg a pozícionálás során, de mértékük ingadozhat. Olyan eset, amelynél minden rész-hiba maximuma lép fel, igen csekély valószínűséggel fordul elő a műszaki gyakorlatban, ezért a méréstechnikában, hasonló esetekben, inkább a súlyozott szórásnégyzetek összegéből származó eredő szórással szokás jellemezni a bizonytalanságot. A pozícionálás statisztikai jellemzőit külön összefoglalva bemutatjuk.
Az eredő abszolút (maximális) hiba a következő tényezőkből tevődik össze:
|
|

ahol:
|
Δxsz |
Szíjág nyúlása (terheléstől függő) | |
|
ΔxF |
Eredő fogrugalmasság miatti alakváltozás a kapcsolódási íven (terheléstől függő) | |
|
ΔxP |
Szíjfeszítés miatti hosszváltozás tűrése (feszítőerőtől függő) | |
|
ΔxSP |
Szíj fogosztásának hibája (katalógus adat) | |
|
ΔxfR |
Fogazott tárcsa sugarának hibája | |
|
Δxex |
Fogazott tárcsa excentricitása |
A pozícionálás bizonytalanságának meghatározása
A pozícionálási bizonytalanságot mindenképpen csak empirikus (gyakorlati mérési adatokra alapozva) úton lehet becsülni.
Két út lehetséges:
Régebbi adatok, tapasztalatok felhasználásával („B”-típusú méréstechnikai becslés)
Mérési adatok felhasználásával („A”-típusú méréstechnikai becslés)
A valószínűségszámításból tudjuk, hogy a véletlen változó „várható értéke” μ (ahol μ=E(x)) és a „szórásnégyzete” (varianciája) σ2, (ahol σ2=D2(x)) nem függvényei az x valószínűségi változónak, hanem „x” eloszlásának tulajdonságait kifejező un. „funkcionálok”. E(x) az „x” valószínűségi változó eloszlásának elhelyezkedésére jellemző, és D2(x) a szóródás (vagy koncentráció) mértékszáma. Tehát „μ” és „σ” elméleti értékek, a gyakorlatban „μ” várható érték helyett  átlagérték, és „σ” szórás helyett „s” tapasztalati szórás, vagy s* korrigált tapasztalati szórás meghatározására van lehetőség. A korrigált tapasztalati szórás kiszámításánál – jellemzően 30-nál kevesebb mérési adat esetében - figyelembe vesszük a szabadságfok csökkenését. Szeretnénk hangsúlyozni, hogy a mérnöki gyakorlatban sem ajánlatos keverni a várható értéket az átlaggal és a szórást a tapasztalati szórással. Ezzel kapcsolatban látszik, hogy „pongyolaság” az ismétlőképesség tartományának emlegetése „six sigma” elnevezéssel, mert ehhez pontosan ismerni kellene a valószínűségi változó eloszlásfüggvényét (Normál, Student), vagy legalább 100 mérési adat kellene, hogy rendelkezésre álljon. Helyesebb lenne tehát a „6s*”, vagy „6s” megnevezés.
átlagérték, és „σ” szórás helyett „s” tapasztalati szórás, vagy s* korrigált tapasztalati szórás meghatározására van lehetőség. A korrigált tapasztalati szórás kiszámításánál – jellemzően 30-nál kevesebb mérési adat esetében - figyelembe vesszük a szabadságfok csökkenését. Szeretnénk hangsúlyozni, hogy a mérnöki gyakorlatban sem ajánlatos keverni a várható értéket az átlaggal és a szórást a tapasztalati szórással. Ezzel kapcsolatban látszik, hogy „pongyolaság” az ismétlőképesség tartományának emlegetése „six sigma” elnevezéssel, mert ehhez pontosan ismerni kellene a valószínűségi változó eloszlásfüggvényét (Normál, Student), vagy legalább 100 mérési adat kellene, hogy rendelkezésre álljon. Helyesebb lenne tehát a „6s*”, vagy „6s” megnevezés.
Egy adott pozíció közelítése történhet „alulról”, azaz alacsonyabb értékek felől, és „felülről”. A következő ábrán szemléltetjük a pozícionálás hibáit és a pozícionálás bizonytalanságát.
A pozícionálási eltérés és az irányváltás hibája az „xe” elméleti, vagy előírt pozícióhoz viszonyítottan jelentkezik. A pozícionálási eltérés az „xe” és a valós alulról történő közelítés átlaga  valamint a valós felülről történő közelítés átlaga
valamint a valós felülről történő közelítés átlaga  és „xe” közötti különbség. Az irányváltás hibája a
és „xe” közötti különbség. Az irányváltás hibája a  és
és  átlagértékek közötti különbség. A pozícionálás teljes bizonytalansági tartománya az adatok normál eloszlása esetében és 99.73% konfidencia szinten
átlagértékek közötti különbség. A pozícionálás teljes bizonytalansági tartománya az adatok normál eloszlása esetében és 99.73% konfidencia szinten  .
.
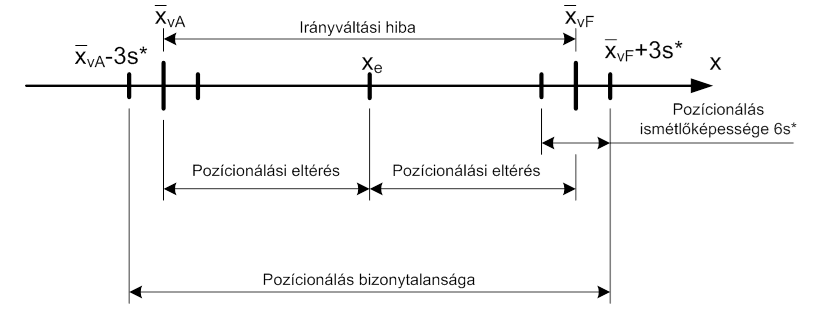
Az előző ábrán megadott jellemzőket összefoglaltuk táblázatosan is, megadva az egyes jellemzők kiszámításának módját is.
|
Ismérv |
Közelítés felülről |
Közelítés alulról |
|---|---|---|
|
Pozícionálási hiba (véletlen hiba) |
|
|
|
Pozícionálási hiba átlaga |
|
|
|
Korrigált tapasztalati szórás |
|
|
|
Pozícionálás ismétlőképessége (P=99,73 %) |
PF=6sF* |
PA=6sA* |
|
Irányváltási hiba |
| |
|
Pozicionálás bizonytalansági tartománya |
| |






12.5. A szakasz állandó együtthatós, lineáris matematikai modellje
A 12.1. szakasz fejezetben már volt arról szó, hogy a fogazott szíjas lineáris mozgató rendszerint két egységből áll, egy motor és hajtómű egységből és a fogazott szíjas mozgás-átalakítóból. Ennek megfelelően járunk el a fogazott szíjas szakasz lineáris matematikai modelljeinek megalkotása során.
Attól függően, hogy a méretektől és az erőhatásoktól függően, a hajtómű esetében számolnunk kell-e a valós modellel, és figyelembe kell-e vennünk a motor induktivitását, többféle változattal dolgozhatunk, hasonlóan a golyósorsós szakaszhoz.
Egyszerűsíti a feladatot, hogy a 10.5. szakasz fejezetben bemutattuk a vonóelemes lineáris mozgató átviteli függvényének levezetését impedancia módszerrel, amely lineáris, állandó paraméterű modellezés esetében másodrendűnek adódott. Az egyszerű szabályozás megtervezéséhez, ha a szakasz a hajtómű kimenetén szétválasztható, elegendő az átviteli függvények ismerete. Pozíciószabályozás esetén a kimenet természetesen nem a sebesség, hanem az elmozdulás „Xm” lesz, tehát a következő átviteli függvényhez egy integrátort sorosan még hozzá kell kapcsolni.
|
| ||
|
| ||
|
|

Fogazott szíjas lineáris mozgatóra, az egyszerűsített és linearizált esetre a katalógusok az eredő rugómerevséget a következőképpen határozzák meg:
|
|
Ahol
|
k SP |
[N/mm] |
a fogazott szíj specifikus rugómerevsége, annak egy milliméter szélességére vonatkoztatva | |
|
h |
[mm] |
vonóelem szélessége | |
|
L 1 |
[mm] |
húzott (terhelt) ág hossza | |
|
L 2 |
[mm] |
terheletlen ág hossza |
Elsőrendű motor és hajtómű egység és fogazott szíjas mozgató
Ennek a modellnek az a feltétele, hogy a hajtómű módosítása elegendően nagy legyen a szétválasztáshoz. Ha ez a feltétel teljesül, akkor a szakasz átviteli függvénye a motor-hajtómű egység és a fogazott szíjas lineáris mozgató sorosan kapcsolt két átviteli függvényéből adódik:
|
|
Az így meghatározott átviteli függvény egy negyedrendű arányos átviteli tagot reprezentál, a szabályozástechnikában szokásos alak az alábbi:
|
|
ahol
|
|

Harmadrendű motor és hajtómű egységgel kombinált fogazott szíjas mozgató
A szakasz eredő átviteli függvényében G2(s) változatlan az első modellhez képest, hiszen igazoltuk, hogy az állandó együtthatós, lineáris mozgató átviteli függvényének rendszáma kettő. Ezért a szakasz átviteli függvénye a második változatban a következő lesz:
|
|
TS és ξS az elsőrendű változatnak megfelelő értékek, az „ai” együtthatókba foglalt paramétereket a 8.1. szakasz fejezet végén találjuk, de a könnyebb érthetőség kedvéért „importáltuk”:
|
| ||
|
| ||
|
| ||
|
|


A szakasz hatodrendű lesz, látjuk, hogy As az első változathoz viszonyítva csak „alakra” módosult, mert az első változatban Be csillapítási tényező alatt mást értettünk. Emlékeztetőül megjelenítjük az első változat eredő csillapítási tényezőjét és eredő tehetetlenségi nyomatékát:
|
|

Ha most a második változat eredő csillapítását kibontjuk, és összevetjük a fent látható első változattal, meggyőződhetünk, hogy nincsen változás, mert a csillapítási tényezőkön és elhelyezkedésükön nem változtatunk:
|
|
A szakasz átviteli függvényét célszerű a fenti formában meghagyni, ha a szabályozókör tervezését Bode diagramokkal végezzük.
Negyedrendű motor és hajtómű egység fogazott szíjas lineáris mozgatóval
A szakasz eredő átviteli függvénye felírásához G1 kiegészül a változatlan G2-vel, és végső soron két szorzatra bontható hetedrendű rendszert kapunk:
|
|
TS és ξS az elsőrendű változatnak megfelelő értékek, az „ai” együtthatókba foglalt paramétereket a 8.1. szakasz fejezet végén találjuk, de a könnyebb érthetőség kedvéért „importáltuk”:
|
| ||
|
| ||
|
| ||
|
| ||
|
|

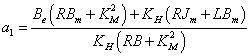

Ha a G1 átviteli függvény rész együtthatói a tervezési követelmények miatt kötöttek, akkor érdemes a rendelkezésre álló adatok behelyettesítésével a paraméteres formáról áttérni a konkrét szám-együtthatós alakra.
A nevező összeszorzása most sem célszerű, de ha olyan számítógépes szimulációs program áll rendelkezésre, amely n-edrendű átviteli függvény Bode diagramjának megszerkesztésére alkalmas, akkor az összeszorzást érdemes programmal (konvolúció utasítással) elvégeztetni.
12.6. A szakasz nemlineáris állapottér modellje
Láttuk a 10.5. szakasz fejezetben, hogy a vonóelemes átalakító, a mechatronikában döntően a fogazott szíjas lineáris mozgató struktúra gráfja a linearizálást megelőzően összetett, és látszólag három rugómerevség ágat tartalmaz, de valójában kettő az, amelyek a mozgatott tömeghez kapcsolódik. Az egyik ág a terhelt (húzott) ág, a másik a terheletlen, de forgásiránytól függően ez is változik. A három gráf-él azért látszólagos, mert az egyik ág közvetlenül, a másik pedig a visszatérítő tárcsán keresztül csatlakozik a tömeghez. Az ágak rugómerevsége változó nagyságú, mert a tömeg pozíciójától függően változik a terhelt (húzott) és terheletlen szíjágak hossza. A rugómerevségük értéke függ a mozgatott tömeg pozíciójától, és függ a mozgatás irányától is. Ezek a nemlineáris rugómerevségek eredő rugómerevségek, hiszen láttuk a 12.4. szakasz fejezetben, hogy a szíj rugalmasságán kívül a kapcsolódási ív rugalmassága és a fogak eredő rugalmassága sem elhanyagolható. A terhelés, illetve az előfeszítés tulajdonképpen az eredő karakterisztikán jelöl ki egy „kezdeti” munkapontot.
A soron következő vizsgálódásainkban arra szeretnénk választ kapni, hogy leíró függvényekkel milyen pontossággal közelíthető a valós helyzet.
Megjegyezzük, hogy a vizsgálódásaink során csak a szíjágak rugómerevségét vesszük figyelembe, az előfeszítéstől és a terheléstől függő a fogrugalmasságot és a kapcsolódási ív rugalmasságát nem.
Fentebb említettük, hogy a mozgatott tömeghez két szíjág csatlakozik. Elsőként a húzott (terhelt) ág rugómerevségével foglalkozunk, és ezt követően megvizsgáljuk, hogy az adott terhelt ághosszhoz milyen terheletlen szíjág tartozik. A nemlineáris rugómerevséget a két rugómerevség párhuzamos eredője (összege) adja. A rugómerevségek leíró függvényeihez szükséges értékek kiszámításához elegendő az adott mozgatási irányban a két véghelyzetet vizsgálni, a mindenkori pozícióhoz tartozó szíj rugómerevség képlete ismert.
Kétszer két ábrából álló ábrasor következik. Az első kettő azt a szíjmerevség változást szemlélteti, amikor a tömeget xmax pozícióból, a forgató tárcsa pozitív forgásiránya mellett, az x0 pozícióba mozgatjuk. A harmadik és negyedik ábra azt mutatja, hogy megfordul a hajtótárcsa forgásiránya, és ennek következtében a tömeget az x0 pozícióból az xmax pozícióba mozgatjuk. Az ábrasor végén bemutatjuk, hogy egy konkrét fogazott szíj típus, adott mozgatási hossz, specifikus rugómerevség, stb. esetében milyen értékhatárok között változik a húzott ág rugómerevsége.
A húzott ágak rugómerevsége mellett számolni kell a terheletlen ág rugómerevségével is, hiszen többször hangsúlyoztuk, hogy a tömeg két ágon keresztül kapcsolódik a hajtótárcsához. A következő táblázatban az összetartozó (párhuzamosan kapcsolt) terhelt és terheletlen ághosszakat foglaltuk össze. Az ághosszakkal a szíj rugómerevségek összefüggenek, ezt az indexeléssel jelezzük. Az egyes összetevőket a kétszer két ábrából álló ábrasorról olvashatjuk le.
A lineáris modellhez hasonlóan úgy tekintjük, hogy a tömeghez a tömeg-középpontban csatlakoztattuk a szíjvégeket.
|
Húzó (terhelt szíjág) hossza és rugómerevsége |
Terheletlen szíjág hossza és rugómerevsége | ||
|---|---|---|---|
|
Lt1=xmozg+x0+rπ/2 |
k1 |
L4= x0+2(rπ/2) + 2x0+xmozg+rπ/2 |
k4 |
|
Lt2= x0+rπ/2 |
k2 |
L3=xmozg+x0+2(rπ/2)+2x0+ xmozg+ rπ/2 |
k3 |
|
Lt3=xmozg+x0+2(rπ/2)+2x0+ xmozg+ rπ/2 |
k3 |
L2= x0+rπ/2 |
k2 |
|
Lt4= x0+2(rπ/2) + 2x0+xmozg+rπ/2 |
k4 |
L1=xmozg+x0+rπ/2 |
k1 |
A fenti táblázatban, és a következőkben az alábbi jelöléseket alkalmaztuk. Az összetartozó terhelt és terheletlen szíjágak hossza természetesen állandó.
|
Lt1…t4 |
Adott tömeg-pozícióhoz tartozó húzó (terhelt) ághossz | |
|
L1…4 |
Terheletlen ághossz | |
|
k1…4 |
Rugómerevségek (terhelt és terheletlen ágak) | |
|
Lh |
A húzott szíjág abszolút hosszúsága | |
|
kh1…h4 |
Abszolút rugómerevségek (terhelt és terheletlen ágak) | |
|
r |
Fogazott tárcsa sugara |
A négy ábra az általános szerkezeti modellt jeleníti meg. Egy valóságos szerkezetnél Lt1…4 úgy is adódhat, hogy a szíjvégek nem a tömeg-középpontba vannak csatlakoztatva. Az egyszerűség kedvéért, a 12.5. szakasz fejezet elején jelzett módon úgy vesszük, mintha esetünkben Lt1…4 a tömegközéppontig terjedne, hiszen nem ismert a konkrét tömeg mérete.
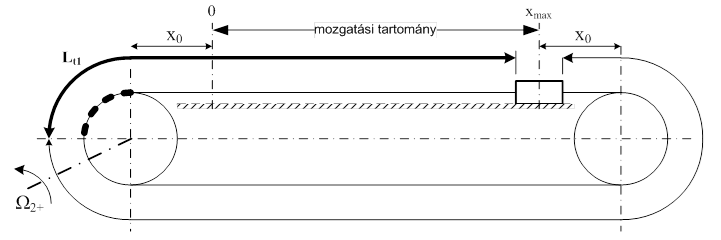
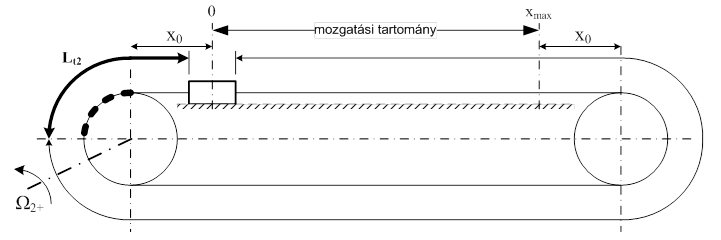
Az első két ábra alapján az alábbi megállapításokat tehetjük.
Hajtótárcsa matematikai pozitív forgásirányban:
A húzott ág rugómerevségének megállapításához figyelembe vett szíjhosszakat vastagabb méretvonallal jelöltük. Vigyázat, ezek a vastag vonalak méretvonalak, a hosszúság megadásához a szíj és a fogazott tárcsa valódi ívhosszát kell alapul venni. A fogazott szíjnak van egy x0 hosszúságú darabja, amely a fogazott kerék negyed körívéhez illeszkedő szíjhosszhoz hozzáadódva azt a minimális szíjhosszat adja, amely ebben a mozgatási irányban a maximális rugómerevséget eredményezi. Az ábrákon nem foglalkoztunk a mozgatott tömeg méreteivel, ami a szíj „holt” szakaszának hosszát természetesen befolyásolja, hanem az x0 távolságot a tömegközéppontig mértük. A fogazott szíjakat részletesen tárgyaló 10.5. szakasz fejezetben látjuk, hogy a szíj eredő rugalmasságához a mozgató fogazott tárcsa kapcsolódási ívének negyedében jelentkező fogrugalmasságot kell hozzávenni. Ugyanebben a mozgatási irányban az előbbi két hosszúsághoz hozzáadva az xmax teljes mozgatási hosszat megkapjuk ennek az iránynak a minimális rugómerevségét. Az Lt2 hosszúsághoz tartozó, terhelt rugómerevség (húzott ág) a két irányban működtetett rendszer legnagyobb rugómerevsége, ennél kisebb az Lt1 hosszhoz rendelt, terhelt ág rugómerevsége.
Hajtótárcsa matematikai negatív forgásirányban:
A húzó (terhelt) ág hosszabb ebben a forgásirányban, amint azt a következő két ábrán láthatjuk. A terhelt ág rugómerevségei ennek megfelelően ebben a mozgatási irányban kisebbek lesznek, a minimális értéke az Lt3 hosszúságnál van, tehát éppen akkor, amikor a hajtó tárcsa a tömeget a vezetéken visszafelé kezdi mozgatni. A szíj rövidülésével nő a rugómerevség, de ez a változás nem olyan mértékű, mint a matematikai pozitív forgásirányú tárcsa esetében volt.
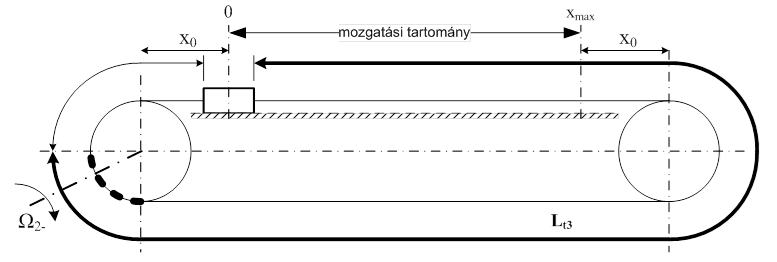
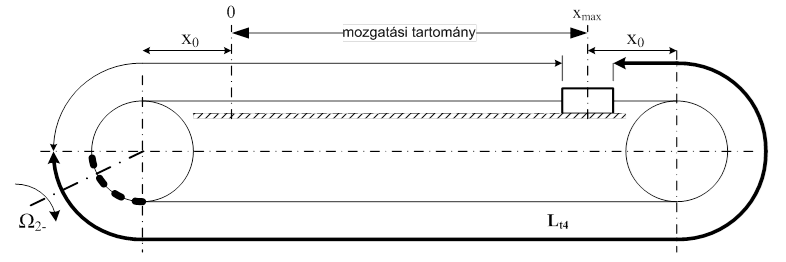
Foglaljuk össze a négy ábra alapján szerzett ismereteinket, és ábrázoljuk a terhelt ág rugómerevségeit a szíj hosszúságának függvényében. Ismert, hogy a szíjágak rugómerevsége fordítottan arányos a szíj hosszával. A fogazott szíj rugómerevsége folytonos függvény, de a lineáris mozgató két mozgási irányának esetében ebből a függvényből csak meghatározott két tartományt használunk fel. A következő diagramon alul látjuk azt is, hogy az adott szíjhosszakkal miként függ össze a tömeg mozgatásának iránya.
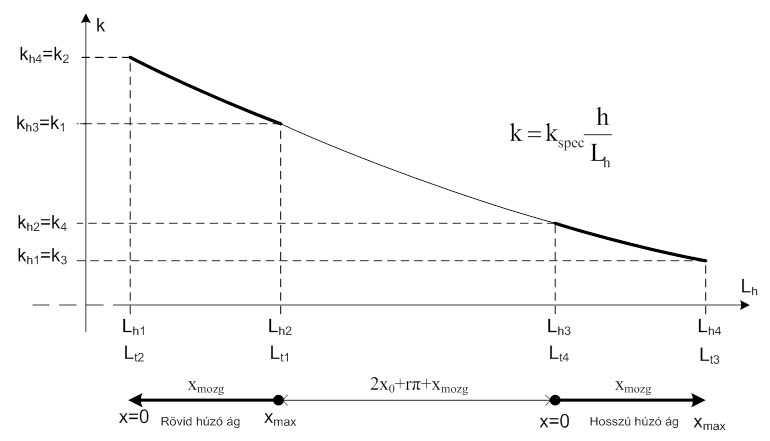
A terhelt (húzott) szíj rugómerevségének változása jobban érzékelhető, ha az értékeket egy, a szerszámgépiparban, robottechnikában használatos fogazott szíj típus esetére megvizsgáljuk.
A példaként választott szíj adatai:
|
Fogtávolság |
p=5 mm | |
|
Szíj szélesség |
b=10 mm | |
|
Tárcsák fogszáma |
z=28 | |
|
Tárcsa sugara |
r=22.3 mm (kiadódó méret: | |
|
Specifikus rugómerevség |
ksp=7,7·103 N/mm a szíj szélességének 1 mm-rére és a szíj 1 mm hosszúságára (Mulco katalógusból) | |
|
„Holt szakasz” |
x0=25 mm | |
|
Mozgatási tartomány |
800 mm |

Ezeknek az adatoknak az alapján meghatározhatóak a húzott (terhelt) és terheletlen ághosszak és a rugómerevségek. A 10.5. szakasz fejezetben bemutatott végeselemes szimulációs eredmény alapján úgy tekintjük, hogy a hajtó tárcsán felfekvő szíjhossznak csupán egy része van húzásra fokozottan igénybe véve. Módosítás nélküli vonóelemes mozgató esetében ez szíjhossz a fogazott tárcsa negyed körívén fekszik fel, a szíj belépésétől a rendszer hossztengelyéig. A többi szíjméret a négy ábráról közvetlenül leolvasható.
|
L2 |
L1 |
L4 |
L3 | |
|
L [mm] |
600 |
860 |
980 |
1780 |
|
k [N/mm] |
1,28·102 |
0,9·102 |
0,78·102 |
0,43·102 |
A rugómerevség változását bemutató diagramon is látható, hogy a merevség a szíj hosszával fordítottan arányos. Ennek következménye, hogy a rövid szíjhosszakkal történő működtetési tartományban a két véghelyzet között nagyobb a különbség, mint a nagyobb szíjhosszak esetében.
A következő feladatunk a négy tömeg-pozícióhoz tartozó eredő rugómerevségek meghatározása. Ehhez felhasználjuk a terhelt és terheletlen szíjágak rugómerevségeinek táblázatát.
|
Hajtótárcsa forgásiránya |
Tömeg pozíciója |
Terhelt ághosszúság |
Terhelt ág rugómerevsége |
Terheletlen ághosszúság |
Terheletlen ág rugómerevsége |
Eredő rugómerevség |
|---|---|---|---|---|---|---|
|
+ |
xmax |
Lt1 |
k1 |
L4 |
k4 |
k1+k4 |
|
+ |
x0 |
Lt2 |
k2 |
L3 |
k3 |
k2+k3 |
|
- |
x0 |
Lt3 |
k3 |
L2 |
k2 |
k2+k3 |
|
- |
xmax |
Lt4 |
k4 |
L4 |
k1 |
k1+k4 |
A táblázat az eddigi megfontolásaink összefoglalásának tekinthető, és segítségével meghatározható az a leíró függvény, amely a nemlineáris rendszermodell megalkotásához elengedhetetlen. Azt kell ugyanis függvény formájában megadnunk, hogy a mozgatott tömeg „x” pozíciója miként befolyásolja a fogazott szíj eredő rugómerevségét. A táblázat alapján az alábbi grafikus függvénykapcsolat feltételezhető:
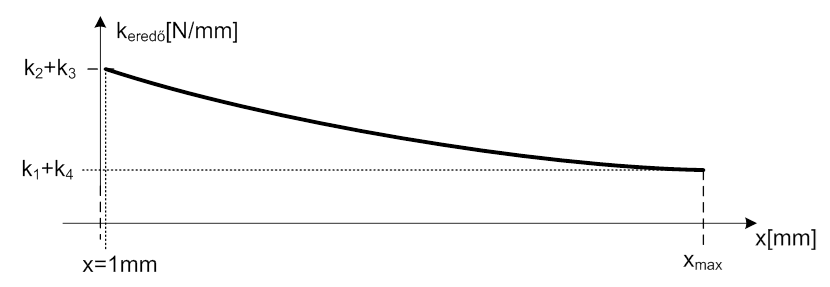
Az adott elrendezésnél, tehát a lineáris mozgatónál az xmax-hoz tartozó k1+k4=ke eredő rugómerevség a minimális értéket éri el. Ez egybecseng azzal a megállapítással, amit csaknem minden gyártó számítási útmutatójában fellelhetünk: A szíjágak eredő rugómerevsége akkor éri el a minimális értékét, ha a húzott (terhelt) és terheletlen ág hossza megegyezik. A korábbi ábráinkról leolvasható, hogy a példaként bemutatott rendszerben, az óramutató járásával megegyező hajtótárcsa forgásirány esetében, tömeg xmax pozíciójában lesz a két szíjág hossza a közel azonos. Megjegyezzük, hogy a példában vizsgált, egyszerű elrendezés esetében a két szíjág hossza a tömeg semmilyen pozíciójában nem lehet teljesen azonos, de ez más térbeli elrendezésnél nyílván előfordulhat.
Nagyobb szíjhosszak esetében a helytől és tárcsa forgásiránytól függő rugómerevség értékek egymáshoz képesti különbsége már nem elhanyagolható.
Konkrét alkalmazási példa esetében az eredő rugómerevség maximális és minimális értéke kiszámítható. A két szélsőérték között 1/x jelleggel változik a függvény, hiszen tudjuk, hogy a rugómerevség és a szíjhossz fordítottan arányosak, de természetesen az x=0 mm nem értelmezett. Helyette, például az x=1 mm = 10-3 m értékhez rendelhetjük hozzá a k2+k3=ke eredő rugómerevséget. A keresett függvénykapcsolat tehát:
|
|
A „K” állandót következőképpen határozhatjuk meg:
|
|

A tömeg pozíciója és a rugómerevség értéke közötti függvénykapcsolat ismeretében megalkotható a szakasz nemlineáris állapottér modellje.
Joggal feltételezhetjük, hogy a hajtómű rugómerevsége lényegesen nagyobb, mint a fogazott szíjas lineáris mozgatóé. Ezért tehát a motor és hajtómű egység elsőrendű változatát alkalmazzuk. A vonóelemes átalakító gráfját látjuk a következő ábrán. A korábbi gyakorlatnak megfelelően a transzlációs elemekhez redukáljuk az Ω2 szögsebességű két forgó mechanikai elemet, és képezzük az eredőket. A rugómerevség ke eredőjének meghatározását, valamint a leíró függvényt e fejezet korábbi részeiben találjuk.
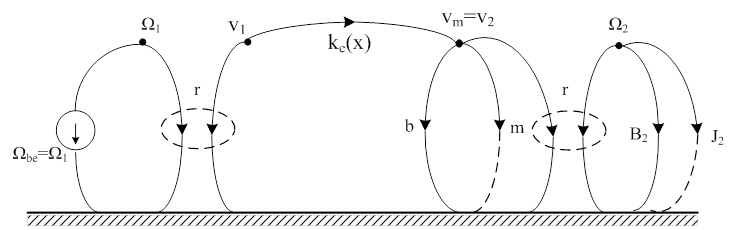
A gráf elemeinek értelmezéséhez az alábbiakat tudjuk:
|
|

ahol  .
.
Felírjuk a vm keresztváltozóval jelzett csomópontra a csomóponti egyenletet, majd elsőrendű differenciálegyenlet rendszerré alakítjuk a vonóelemes átalakító modelljét.
|
|
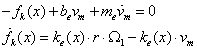
A teljes szakasz nemlineáris állapottér modellje a fentiekkel:
|
|
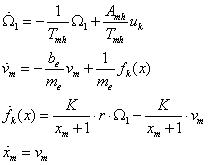
A modell használhatóságát valós műszaki adatokkal érdemes ellenőrizni. E fejezetben, a számításokhoz korábban már alkalmaztunk valós adatokat a fogazott szíjra, hajtótárcsára, mozgatási hosszra, stb., ezért a szimulációhoz ismételten ezeket az adatokat használjuk fel.
A nemlineáris szíj rugómerevség kiszámításához táblázatban közöltük a tömeg pozíciójától és a forgásiránytól függő értékeket, és ezeket használjuk továbbra is megtartva a mozgatási hosszat 800 mm-ben.
|
ki |
k2 |
k1 |
k4 |
k3 |
|
k [N/mm] |
1,28·102 |
0,9·102 |
0,78·102 |
0,43·102 |
k2+k3=1,71 102 N/mm=1,71 105 N/m
k1+k4=1,68 102 N/mm=1,68 105 N/m
A szíj nemlineáris rugókarakterisztikájának egyenlete a korábban bemutatott számítási mód szerint:
|
|
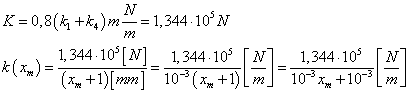
A lineáris mozgató tervezéséhez szükséges legfontosabb adatokat „importáltuk” a fejezet korábbi részéből. A szimulációhoz szükséges adatokat SI egységekben helyettesítettük be, ez a legcélszerűbb eljárás. A lineáris mozgató felbontása várhatóan 0,1 mm, azaz 10-4 m lesz, ezért az eredmények megjelenítésénél alkalmasan kell majd megválasztani a léptéket.
|
Fogtávolság |
p=5 mm | |
|
Szíj szélesség |
h=10 mm | |
|
Tárcsák fogszáma |
z=28 | |
|
Tárcsa sugara |
r=22.3 mm=2.23·10-2 m (kiadódó méret: | |
|
Specifikus rugómerevség |
ksp=7,7·103 N/mm a szíj szélességének 1 mm-rére és a szíj 1 mm hosszúságára (Mulco) | |
|
„Holt szakasz” |
x0=25 mm | |
|
Mozgatási tartomány |
800 mm | |
|
Mozgatott tömeg |
2 kg | |
|
Súrlódásból adódó csillapítási tényező |
5·10-2 Ns/m (tapasztalati érték) | |
|
Motor-hajtómű időállandó Tmh |
0,020 s | |
|
Motor nyomatékállandója KM |
50 mNm/A= 5·10-2 Nm/A | |
|
Motor csillapítási tényezője Bm |
10-3 Nms/r | |
|
Motor armatúra ellenállása R |
15 Ω | |
|
Hajtómű módosítása i |
500 | |
|
Motor-hajtómű Amh arányos |
5,71·10-3 rad/Vs |

|
|

A nemlineáris állapottér modell feltételezett paraméterekkel:
|
|
Az állapottér modell időállandói között a legkisebb a harmadik egyenlet második együtthatójában található, értéke 7,44·10-6 s=7,44 μs. Ez a szimulációk során megköveteli a ΔT=5·10-7…10-6 s körüli, de lehetőleg e tartománynál kisebb iterációs lépésközt, ami a számítási időt jelentősen megnövelheti, bár a modell legkisebb és legnagyobb időállandói között 106 a szorzó, és ez s digitális szimulációk esetében nem jelent még gondot.
Szakirodalom
[12.1.] www.eassistant.eu. GWJ Technology GmbH. Braunschweig .
[12.2.] Kleiner Wissenspeicher Zahnriemengetriebe. IFWT TU Dresden. 2000.
13. fejezet - Szervopneumatikus rendszer szakaszának modellje
- 13.1. A munkahenger modellezési problémái
- 13.2. A szervopneumatikus pozícionáló rendszer bemutatása
- 13.3. A munkahenger, mint szakasz modellje
- 13.4. A szervopneumatikus rendszer állapottér modellje
- Szakirodalom
13.1. A munkahenger modellezési problémái
A 6.2. szakasz fejezetben a pneumatikus munkahenger modelljének egyszerűsített változata már bemutatásra került, amely modell elsősorban a fordító váltó típusú rendszerek modellezésének bemutatását tartotta szem előtt. A valós rendszer működését pontosabb közelítéssel leíró összefüggések ettől természetesen részben eltérnek, hiszen más célból kerültek megfogalmazásra, felírásra. A pneumatikus munkahengerekkel felépített rendszerre jellemző nehéz pozícionálhatóság több tényező eredménye, amelyek a hatékony működtetés szempontjából nem elhanyagolhatóak. A modellezés során mechatronikai szemszögből több rendszertípust (mechanikai egyenes vonalú, fluid, villamos, termikus) egy berendezésen belül egyszerre alkalmazunk, mely a műszaki ismereteink alapján megalapozott elhanyagolásokkal együtt is összetett rendszerleírást eredményez. A szervopneumatikus rendszer modelljéhez alapvetően két úton is eljuthatunk. Az egyik, a 6.2. szakasz fejezetben bemutatott út, amikor a rendszert eleve átgondoltan linearizált energiatárolókból és disszipatív elemekből építjük fel. A másik úton a mechanika, termodinamika, áramlástan alapösszefüggéseit felhasználó egyenletrendszerből kiindulva jutunk el a rendszer matematikai modelljének felírásáig, bemutatva az egyes összefüggések nemlineáris jellegét.
13.2. A szervopneumatikus pozícionáló rendszer bemutatása
A szabályozott szakasz bármely dugattyúrudas, vagy dugattyúrúd nélküli hengerre érvényes, amelyekbe a beáramló tömegáram szabályozását proporcionális szervo szelepek végzik. A szervopneumatikus pozícionálás elvi felépítését az alábbi ábra szemlélteti.
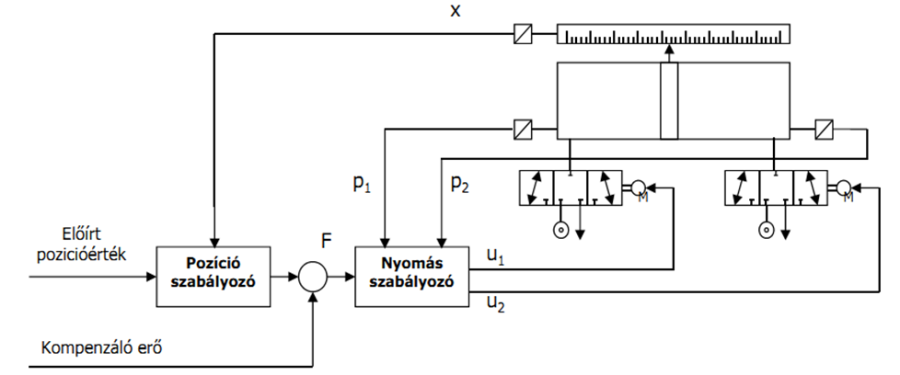
A modellezés szempontjából elsődleges fontosságú a szabályozott szakasz, amibe jelenleg a beavatkozó szervet is (jelen esetben a szelepet) beleértjük. A rendszerben a szelepek feszültségének állításával befolyásoljuk a szervoszelepeken átáramló levegő mennyiségét. A munkahengerbe áramló levegő hatására a munkahenger kamrái között nyomáskülönbség jön létre, mely a munkahenger dugattyújára erőt fejt ki. Amennyiben a nyomáskülönbségből fakadó erő a súrlódás leküzdéséhez elegendő, a dugattyú elmozdul. A modell felírása során kapcsolatot kívánunk teremteni a szelepet vezérlő feszültség (u) és a munkahenger dugattyújának elmozdulása (x) között.
13.3. A munkahenger, mint szakasz modellje
A szervopneumatikus rendszerek döntő többségében a munkavégző elem egy dugattyúrúd nélküli munkahenger, melynek felépítése az alábbi ábrán látható. Ez a típus modellezés szempontjából a dugattyúrudas kivitelű munkahengerekhez képest éppen a dugattyúrúd hiánya miatt előnyös, hiszen ebben az esetben a dugattyú kamranyomásokkal terhelt keresztmetszete mindkét oldalt azonos nagyságú.
![Dugattyúrúd nélküli munkahenger felépítése [13.4.]](images/image_XIII_2.png)
A munkahengert két változó térfogatú kamraként modellezzük, melynek elmozduló falait a dugattyú egy-egy oldala alkotja. A rendszer leírásához meg kell határoznunk az összefüggéseket a dugattyú mozgása, a kamrákban lévő levegő állapotváltozói, és a kamrákba beáramló levegő tömegáramai közt.
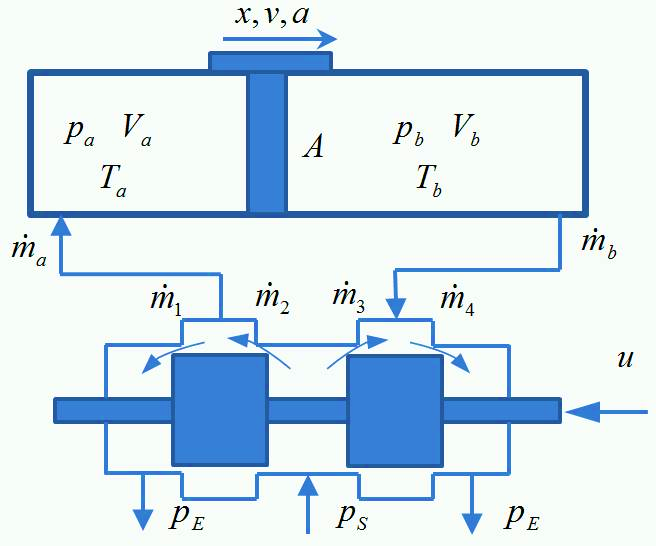
A pneumatikus rendszer modellezése során szereplő fizikai mennyiségek:
|
x |
[m] |
pozíció | |
|
v |
[m/s] |
sebesség | |
|
a |
[m/s2] |
gyorsulás | |
|
l |
[m] |
munkahenger lökethossz | |
|
m |
[kg] |
mozgatott tömeg | |
|
F |
[N] |
erő | |
|
p |
[Pa] |
nyomás | |
|
k |
[N/m] |
rugómerevség | |
|
T |
[K] |
hőmérséklet | |
|
A |
[m2] |
dugattyú keresztmetszet | |
|
A sz |
[m2] |
szelep átömlési keresztmetszet | |
|
|
[kg/s] |
tömegáram | |
|
Q |
[J] |
közölt hőmennyiség | |
|
W f,1→2 |
[J] |
térfogati munka | |
|
ρ |
[kg/m3] |
sűrűség | |
|
v g |
[m/s] |
gáz áramlási sebesség | |
|
c |
[J/(kg*K)] |
fajlagos hőkapacitás | |
|
κ |
[-] |
adiabatikus kitevő | |
|
R |
[J/(mol*K)] |
specifikus gázállandó | |
|
|
[m3/s] |
térfogatáram | |
|
α |
[-] |
átömlési tényező | |
|
Ψ |
[-] |
tömegáram paraméter | |
|
u |
[V] |
feszültség |


13.3.1. A munkahenger mozgásegyenlete
Elsőként írjuk fel a mozgásegyenletet a dugattyúra, mely az erők egyensúlyi egyenletének felírásával történik. A felíráshoz valamely irány pozitív előjelű kijelölése szükséges, azaz példának okáért a jobbra haladó mozgásirány legyen pozitív előjellel jelölve. Ez akkor teljesül, ha az „a” oldali kamranyomás a „b” oldali kamranyomásnál legalább annyival nagyobb erőt fejt ki a dugattyúra amekkora a súrlódás leküzdéséhez szükséges. Az ezen felüli erőkülönbség a dugattyú –és a mozgatott tömeg- gyorsítására fordítódik.
|
|
(13.1) |
A dugattyú a illetve b oldalán levő nyomásból származó dugattyúra ható erő Fa és Fb:
|
|
(13.2) | |
|
|
(13.3) |


a dugattyú sűrített levegővel érintkező felülete az a illetve b kamrarészben, pa, és pb a kamrákban uralkodó nyomás.
A rendszer dinamikus viselkedését a súrlódás, különösen a közeg –sűrített levegő- összenyomhatósága miatt, nagymértékben befolyásolja. A súrlódás leírására az egyszerűbb esetekben a kvázi statikus súrlódási modellek alkalmazhatóak, amikor is a mozgás iránya gyakran változik, a dugattyú mozgásának sebessége pedig nem túl nagy. A modellek közül az egyik legegyszerűbb a Coulomb súrlódás, mely két szilárd test között lép fel és egy konstans nagyságú, a mozgás irányával ellentétes irányba ható erővel írható le. Fontos megjegyezni, hogy míg a mechanikai rendszerek nagy részében a Coulomb súrlódás a felületek közötti normálerő és a köztük jelentkező súrlódási együtthatóból az  összefüggéssel felírható, addig a pneumatikus rendszereknél a súrlódást jelentős részben a dugattyú tömítésének hengercsőbe feszülése okozza, mely az összeszerelés pillanatától jellemzi a munkahengert. Ez ahhoz vezet, hogy a súrlódás Coulomb összetevője (FC) az imént említett összefüggéssel nem számítható. A súrlódás leírását tovább nehezíti, hogy a legtöbb munkahengerben ajakos tömítés található, melyeknél - a tömítés alakja miatt- a kamrában uralkodó nyomás az ajakos részt a hengercsőnek feszíti, így egy nyomástól is függő súrlódási erőt okoz. Ha utóbbitól eltekintünk a Coulomb súrlódás összefüggése:
összefüggéssel felírható, addig a pneumatikus rendszereknél a súrlódást jelentős részben a dugattyú tömítésének hengercsőbe feszülése okozza, mely az összeszerelés pillanatától jellemzi a munkahengert. Ez ahhoz vezet, hogy a súrlódás Coulomb összetevője (FC) az imént említett összefüggéssel nem számítható. A súrlódás leírását tovább nehezíti, hogy a legtöbb munkahengerben ajakos tömítés található, melyeknél - a tömítés alakja miatt- a kamrában uralkodó nyomás az ajakos részt a hengercsőnek feszíti, így egy nyomástól is függő súrlódási erőt okoz. Ha utóbbitól eltekintünk a Coulomb súrlódás összefüggése:
|
|
(13.4) |
A jelenség egy másik megközelítése a viszkózus súrlódás, mely főként a folyadékokra jellemző, az anyag belső súrlódását írja le. A viszkózus súrlódási erő egyenesen arányos a mozgás sebességével, iránya azzal ellentétes:
|
|
(13.5) |

ahol b a folyadékra jellemző csillapítási tényező.
Az említett két súrlódási modell eredője még mindig nem ad pontos közelítést a nulla körüli sebességek esetében, arra jó közelítéssel a Stribeck-féle modell alkalmazható, melyet a következő egyenlet ír le:
|
|
(13.6) |
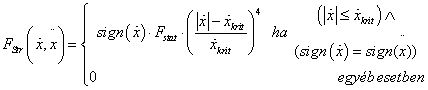
ahol Fstat a tapadási súrlódási, vagy álló helyzetben fellépő maximális súrlódási erő.  az a kritikus sebesség, mely alatt az akadó csúszás jelensége figyelhető meg. Ezt legegyszerűbben úgy képzelhetjük el, mintha egy rugó segítségével mozgatnánk a testet: ha elkezdjük húzni a rugót állandó sebességgel, a test nem mozdul, amíg a rugón keresztül átadódó erő el nem éri az Fstat-ot, eközben a rugó nyúlik. Amikor átlépjük a maximális súrlódási erőt, akkor mivel a csúszási súrlódási együttható kisebb, mint a tapadási, nagyobb sebességgel indul el a test, mint amivel a rugót húzzuk, így elkezdi behozni lemaradását, kvázi utoléri azt. A rugó megnyúlása, ezáltal a rugón keresztül átadódó erő csökken, aminek következtében a test újra megáll, és a jelenség kezdődik elölről. Ezt a jelenséget hívják akadozó-csúszási súrlódásnak (stick-slip). Az akadozó csúszás kevésbé érvényesül, ha nagyobb sebességgel mozgatjuk a testet, illetve egy kritikus sebesség (
az a kritikus sebesség, mely alatt az akadó csúszás jelensége figyelhető meg. Ezt legegyszerűbben úgy képzelhetjük el, mintha egy rugó segítségével mozgatnánk a testet: ha elkezdjük húzni a rugót állandó sebességgel, a test nem mozdul, amíg a rugón keresztül átadódó erő el nem éri az Fstat-ot, eközben a rugó nyúlik. Amikor átlépjük a maximális súrlódási erőt, akkor mivel a csúszási súrlódási együttható kisebb, mint a tapadási, nagyobb sebességgel indul el a test, mint amivel a rugót húzzuk, így elkezdi behozni lemaradását, kvázi utoléri azt. A rugó megnyúlása, ezáltal a rugón keresztül átadódó erő csökken, aminek következtében a test újra megáll, és a jelenség kezdődik elölről. Ezt a jelenséget hívják akadozó-csúszási súrlódásnak (stick-slip). Az akadozó csúszás kevésbé érvényesül, ha nagyobb sebességgel mozgatjuk a testet, illetve egy kritikus sebesség ( ) felett a hatása elhanyagolható. Ezt a tendenciát írja le a fenti Stribeck-féle modell. A határsebességet az alábbi képlet írja le:
) felett a hatása elhanyagolható. Ezt a tendenciát írja le a fenti Stribeck-féle modell. A határsebességet az alábbi képlet írja le:
|
|
(13.7) |
Ahol k a mozgatott rendszer rugóállandója, m a tömege. FN a felületeket összeszorító normál erő, mely egy állandónak tekinthető a dugattyúhoz csatolt rendszer tömegét és az összeszerelés szorító erejét leíró erőből, és egy változó, a munkahenger kamrájában lévő nyomástól (mely a dugattyún lévő tömítőgyűrűt a kamra oldalához szorítja), a kamrában lévő hőmérséklettől, és emiatt (a dugattyú sokáig egy helyben áll akkor letapad) időtől függő erőből áll.
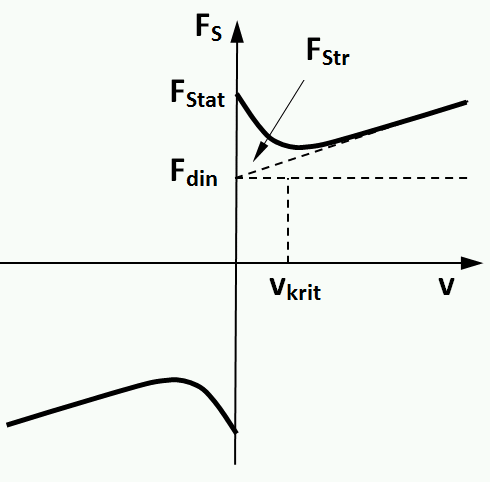
A munkahengert, két változó térfogatú kamraként modellezzük. A modellezés szempontjából a kamrák nyomásának az idő függvényében leírt változása lényeges. A folyamatok végiggondolásával belátható, hogy egy kamrában a nyomás változását az alábbi módokon következhet be:
a kamra térfogata változik (dugattyú elmozdul)
a kamrában található anyagmennyiség változik (a kamrába sűrített levegőt juttatunk, vagy engedünk ki)
a kamra falán keresztül a kamrában található gáz és a környezet között hőcsere megy végbe (a termikus folyamat időállandója az előző két változáshoz képest nagyobb - hatását lényegesen lassabban fejti ki-, így -a modellezést némileg egyszerűsítve- ezzel a továbbiakban nem számolunk, azaz adiabatikus folyamatot feltételezünk).
A fejezetrészben az említett folyamatok részletes leírására kerül sor.
A nemlineáris modellel kapcsolatban az alábbi kikötéseket, egyszerűsítéseket tesszük meg:
A kamrában adiabatikus folyamatok mennek végbe, így a hőátadást a kamrák és a környezet között elhanyagoljuk,
A kamrában lévő gáz ideális,
A kialakuló áramlások egy dimenziósak,
stacionáriusak.
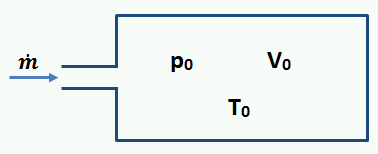
A gáz állapotváltozóinak meghatározásához, alábbi egyenleteket használjuk fel. Mivel a leírás a szakirodalomban több helyen részletes bemutatásra kerül, itt csak az egyenletek rövid magyarázattal kerülnek bemutatásra:
Állapotegyenlet (itt m a gáz tömegét jelöli):

(13.8)

(13.9)
Termodinamika I. Főtétele zárt rendszer esetén, ahol Q a közölt hőmennyiség; Wf a térfogati munka:
(13.10)
Ahol
 ;
;  ,
, melyre érvényes:

A specifikus gázállandó:

(13.11)
Az adiabatikus kitevő:

(13.12)
A kamrában lévő levegő nyomásviszonyait, a nyomást leíró függvény változásának vizsgálatával érthetjük meg:
|
|
(13.13) |

Az egyes tagok vizsgálatára a következő fejezetrészben kerül sor.
13.3.2.1. A nyomás változása hőmérsékletváltozás hatására
|
|

A nyomás megváltozását írja le a hőmérsékletváltozás hatására, miközben a térfogat és a gáz tömege állandó. A térfogat és a tömeg állandóságából következik, hogy hőmérsékletváltozás csak hőközlés útján jöhet létre. Mivel adiabatikus folyamatváltozást tételeztünk fel, ettől a tagtól, ahogy a bevezetőben már említésre került, a továbbiakban eltekintünk.
13.3.2.2. A nyomás változása a térfogatváltozás hatására
|
|

Írja le a nyomás megváltozását a térfogatváltozás hatására, miközben a kamrában lévő hőmérséklet és a gáz tömege állandó. A térfogat megváltozását, a munkahenger dugattyújának elmozdulása okozza. A dugattyú munkáját felírva a rendszerre (mely a tömeg állandóságából következően zártnak tekinthető), az energiaegyenlet (13.10) (izochor folyamatváltozás esetében):
|
|
(13.14) |

Felhasználva az ideális gáz állapotegyenletét (13.8) és a szorzatfüggvények deriváltjára vonatkozó szabályt:
|
|
(13.15) |

Rendezve, és behelyettesítve az izochor és izobár fajhők közti összefüggést (13.12) az alábbi alakot kapjuk:
|
|
(13.16) |

Az adiabatikus kitevőre vonatkozó összefüggést (13.12) behelyettesítve:
|
|
(13.17) |

Ez alapján a nyomás megváltozása:
|
|
(13.18) |
13.3.2.3. A nyomás változása az anyagmennyiség változásának hatására
|
|

A gáz nyomásának megváltozását írja le a tömeg változásának hatására, miközben a kamra térfogata, és a gáz hőmérséklete állandó. Mivel a kamra térfogata állandó, a tömegváltozás a sűrűség megváltozását eredményezi:
|
|
(13.19) |

mivel V állandó, így:
|
|
(13.20) |

Az állapotegyenletből (13.13) kifejezve p-t, behelyettesítve az adiabatikus állapotváltozásra vonatkozó egyenletbe, megkapjuk a nyomás változását a sűrűség függvényében:
|
|
(13.21) |
Ezt a sűrűség szerint deriválva:
|
|
(13.22) |
A (13.21) egyenletet (13.22)-be helyettesítve:
|
|
(13.23) |

A gáztörvényt (13.9) behelyettesítve kapjuk:
|
|
(13.24) |

Tehát a nyomás megváltozása a tömegváltozás hatására:
|
|
(13.25) |
(13.18) és (13.25) felhasználásával a nyomás változása a munkahengerben:
|
|
(13.26) |

Felhasználható, hogy a térfogatváltozás a dugattyú mozgásából adódik (a henger keresztmetszete nem változik):
|
|
(13.27) |

Behelyettesítve (13.26)-ba:
|
|
(13.28) |
Az összefüggések levezetése után most már figyelembe vehető, hogy a dugattyú jobbra történő elmozdulása - a feltételezett pozitív irányt szem előtt tartva - a bal oldali kamra térfogatának növelésével, míg a jobb oldalinak csökkenésével jár. Az összefüggésben V0a és V0b a két kamra holtterének térfogatát, illetve l a munkahenger lökethosszát jelöli.
|
|
(13.29) | |
|
|
(13.30) |


Ugyan általában a gáz az egyik kamrába befelé, míg a másikból kifelé áramlik, ez csak a szelepmodell során lesz figyelembe véve. Itt mindkét kamra töltését leíró egyenlet látható. A munkahenger bal oldali kamrájára:
|
|
(13.31) |

A jobb oldali kamrájára:
|
|
(13.32) |

13.3.3. A nyomáskülönbség hatására fellépő tömegáramok meghatározása [13.3.]
A munkahenger modelljének leírásához meg kell határoznunk az egyes kamrákba be, illetve kiáramló levegő tömegáramát, mely a szelep viselkedése leírásához döntő fontosságú. A rendszer viselkedésére tett kikötések a kamrák nyomásviszonyait vizsgáló fejezetben leírtakkal azonosak. A felíráshoz a továbbiakban felhasználjuk:
a gázok áramlásának leírására a Bernoulli egyenletet:
|
|
(13.33) |
valamint az adiabatikus állapotváltozásra vonatkozó egyenletet:
|
|
(13.34) |

A tömegáram meghatározásához először a Bernoulli egyenletet (13.33) az áramvonal mentén a kamrából kiáramló gázra kell felírni, feltételezve, hogy a kamrában lévő gáz kvázistatikus állapotban van, így annak sebessége zérus.
|
|
(13.35) |

Az 1-es indexszel a kamrában lévő állapotokat, 2-es indexszel a kiáramló gáz állapotváltozóit jelöljük. Az állapotegyenletből (13.9) kifejezve p-t, behelyettesítve az adiabatikus állapotváltozásra vonatkozó egyenletbe (13.34), megkapjuk a sűrűség változását a nyomás függvényében:
|
|
(13.36) |

ahol p0 a légköri nyomás, illetve ρ0 a légköri nyomáson a levegő sűrűsége. (13.36)–t behelyettesítve (13.35)-be, majd elvégezve az integrálást:
|
|
(13.37) |
A behelyettesítéseket elvégezve, egyszerűsítve, kifejezve v-t megkapjuk a kamrából kiáramló gáz átlagsebességét:
|
|
(13.38) |
Feltételezve, hogy a kiáramló gáz sűrűsége a kiáramlási pontnál időben állandó (stacionárius az áramlás), a tömegáram számítására az alábbi (13.40) összefüggést használhatjuk, valamint, hogy a térfogatáram kiszámítására (13.39) összefüggés érvényes:
|
|
(13.39) | |
|
|
(13.40) | |
|
|
(13.41) |



A sűrűségváltozásra vonatkozóan (13.36)–t behelyettesítve a kifejezést alakítsuk át az alábbi formára:
|
|
(13.42) |
Az összefüggést megvizsgálva a szakirodalom a (13.42) összefüggés első gyökjel alatti részét tömegáram paraméternek nevezi, melyet a továbbiakban Ψ-vel jelöljük
|
|
(13.43) |
Ψ –t p2/p1 nyomásviszony függvényében ábrázolva, ahol p2 a kilépő oldali illetve p1 a belépő oldali nyomásértéket jelöli.:
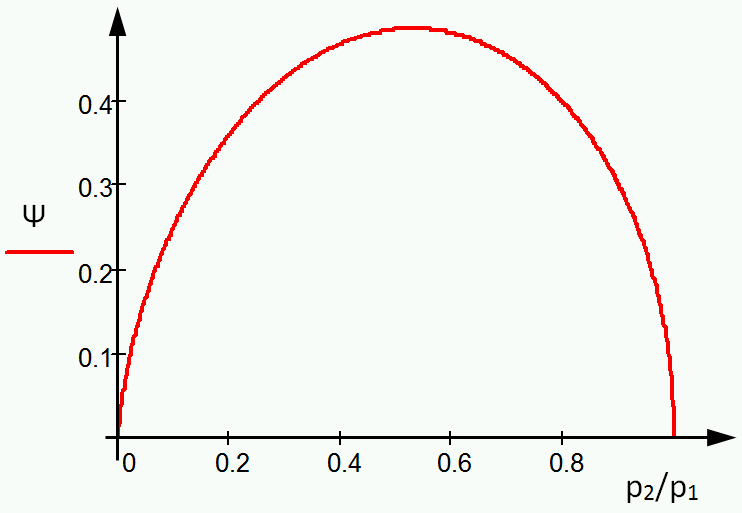
Amint azt láthatjuk, a függvénynek maximuma van. A szélsőérték meghatározásához írjuk fel a függvény deriváltját, majd az alábbi egyenletet megoldva:
|
|
(13.44 | |
|
|

Az egyenletnek csak a középső tényezője lehet zérus, melyből:
|
|
(13.45) |
Tehát a kritikus nyomásviszony, ideális kétatomos gáz (κ=1.4) esetén
|
|
(13.46) |
A kritikus nyomás kialakulásának megértéséhez vizsgáljuk meg a kiáramló gáz sebességét a kritikus nyomásnál, (13.38)-ba behelyettesítve a (13.9) gáztörvényt:
|
|
(13.47) |
A kilépő gáz hőmérsékletét megkapjuk, ha az adiabatikus állapotváltozásra vonatkozó (13.34) összefüggésbe behelyettesítjük a kritikus nyomás (13.46) értékét.
|
|
(13.48) |

Ezt (13.48) behelyettesítve a sebességképletbe (13.47) azt kapjuk, hogy a kiáramlási sebesség megegyezik a gázban a hang adott hőmérsékletre vonatkozó terjedési sebességével.
|
|
(13.49) |

Ahogy elkezdjük növelni a nyomást a tartályban (vagy a külső nyomást csökkenteni), a nyomáskülönbség által áramlás alakul ki, melynek sebessége a nyomásviszonyoktól függ. A kritikus nyomásviszonyt elérve azt tapasztaljuk, hogy a kiáramlási sebesség és a kilépő gáz állapotváltozói nem változnak. Ezt azzal magyarázhatjuk, hogy a gázokban a nyomásváltozás nyomáshullámként jön létre, mely nyomáshullám terjedési sebessége éppen a hangsebességgel egyenlő, így ha a kilépő gáz sebessége eléri a hangsebességet, a nyomásváltozás nem képes átlépni a kiáramlási keresztmetszetet, a nyomásviszony változása tehát nem tudja módosítani a nyomásmegoszlást a kamra és a kilépési pont között.
Tehát a kritikus nyomásviszony fölött az a tömegáram paraméter állandó marad. A számítások egyszerűsítése végett a paramétert a különböző szakirodalmakban alkalmazott alábbi közelítő függvénnyel közelítjük:
|
|
(13.50) |
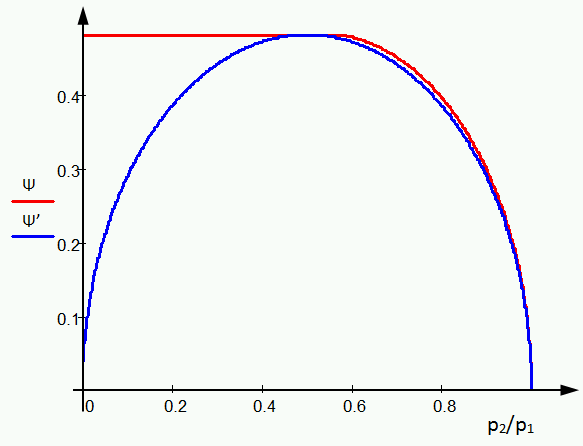
A tömegáram alakulása a munkahenger kamráinál:
|
|
(13.51) |
A sűrűségtől való függés, a gáztörvény (13.9) felhasználásával megszüntethető:
|
|
(13.52) |
A tömegáramok számításánál a veszteségek (súrlódás, hő) és az áramlási keresztmetszet geometriai sajátosságai következtében korrekciós együtthatót kell alkalmazzunk, mely α átömlési tényezővel kerül számításra. Ez a korrekciós együttható empirikus módon, az alábbi összefüggés érvényességét szem előtt tartva kerül meghatározásra, melyre a szakirodalomban [13.5.] találunk mérési eljárást, becsült értékeket
|
|
(13.53) |
13.3.4. A szervoszelep modellje
Az alkalmazások jelentős részében egy szervoszelep a tolattyú fordítása, vagy lineáris mozdítása révén szabályozza a munkahenger kamráiba beáramló, illetve az onnan kiáramló tömegáramokat. A szelep a bemenő feszültség alapján változtatja a tolattyú szöghelyzetét vagy pozícióját, mely a szelep átömlési keresztmetszetére van hatással. A tömegáramokat az átömlési keresztmetszetek változása, és a szelep egyes kamráiban uralkodó nyomások befolyásolják. A szelep modelljét az alábbi ábra segítségével érthetjük meg jobban.
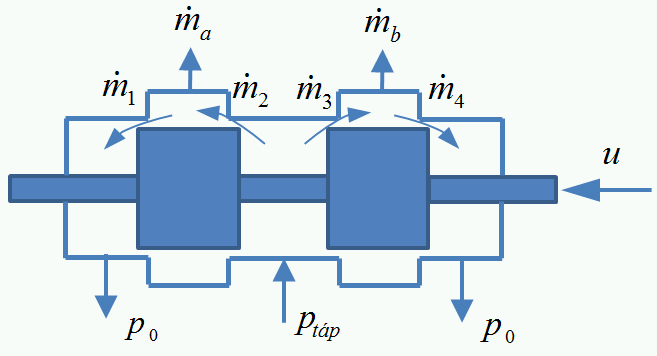
A szelep alsó középső csatlakozójához kötjük a tápnyomást (továbbiakban ptáp, a másik két alsó csatlakozó a leszellőzést biztosítja. A rendszerből távozó levegő nyomását p0-val jelöljük.
A munkahenger levegőellátását a szelep a tápnyomáson keresztül a felső csatlakozókon biztosítja. Az ábrának megfelelően mind a két kamra esetében a kamrát töltő tömegáram ( és
és  ) pozitív. Ugyan fizikai értelemben az ábrán látható szelepkonstrukció esetében ez, hogy egyszerre töltsük mindkét kamrát, nem lehetséges, azonban a tolattyú elmozdulásának megfelelő nyitási keresztmetszetek miatt
) pozitív. Ugyan fizikai értelemben az ábrán látható szelepkonstrukció esetében ez, hogy egyszerre töltsük mindkét kamrát, nem lehetséges, azonban a tolattyú elmozdulásának megfelelő nyitási keresztmetszetek miatt  tömegáramok értékei az egyik kamra tömegáramra negatív előjelet eredményeznek, melyet az alábbi összefüggések írnak le:
tömegáramok értékei az egyik kamra tömegáramra negatív előjelet eredményeznek, melyet az alábbi összefüggések írnak le:
|
|
(13.54) | |
|
|
(13.55) |


A tömegáramok számítása az előző fejezetrészben tárgyalt módon a tartályból való kiáramlás képletével történik. Miszerint:
|
|
(13.56) | |
|
|
(13.57) | |
|
|
(13.58) | |
|
|
(13.59) |
A szelep tolattyúja másodrendű csillapított rendszerként működik, ahol a rendszer energiatárolóit a tolattyú tehetetlensége, valamint a súrlódásból és kamranyomás ellenállásából adódó csillapítás alkotja.
Matematikailag az alábbi differenciálegyenlettel írható fel, ahol xsz a tolattyú elmozdulása, a Fsz szelep tekercse által a tolattyúra kifejtett erő, mely a szervo-szelepet szabályozó feszültségtől u függ:
|
|
(13.60) |

ahol ω a rendszer körfrekvenciája ξ a csillapítás foka.
A szi szelep geometriai kialakításától függően feltételezzük, hogy a szelep csatlakozójának átömlési keresztmetszete közelítően egyenesen arányos a tolattyú elmozdulásával xsz.
13.4. A szervopneumatikus rendszer állapottér modellje
Az alábbi fejezetrészekben levezetett összefüggések numerikus szimulációval minden további nélkül használhatóak, a munkahenger dugattyújának pozíciója a szelep működtetésének függvényében meghatározható. A rendszer modellezésének szempontjából legfontosabb összefüggések a mozgásegyenlet (13.1) valóságos működést minél jobban megközelítő súrlódási modellel felírt összefüggése, illetve a kamrák nyomásának kialakulása (13.31) (13.32). Amennyiben munkaponti linearizálást használunk, illetve élünk néhány egyszerűsítési lehetőséggel, a rendszer működését leíró legfontosabb négy állapotjelzőhöz köthető modellt kapunk (az állapottér modell részletesebb leírás az 1. fejezet és 5. fejezet fejezetekben található). A mozgásegyenlet ezúttal csak viszkózus súrlódást figyelembe véve:
|
|
(13.61) |
A nyomás kialakulást leíró egyenletek amennyiben a kamrák holtterétől eltekintünk:
|
|
(13.62) | |
|
|
(13.63) |

Az utóbbi egyenletekből (13.61), (13.62) és (13.63) Látszik, hogy az állapotjelzők (a rendszer működését leíró energiatárolók töltöttségi állapotát leíró állapotjelzők) vektora, kiegészítve a pozícióval a következő:
|
|
(13.64) |

Az állapottér modell főegyenlete:
|
|
(13.65) |
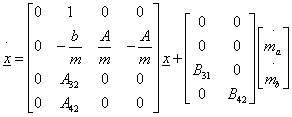
ahol a nyomás kialakulását leíró összefüggések nem csak egy változótól függenek, ezért kezelésük a hagyományos módon nem lehetséges. Így a rendszermátrixban jelölt összefüggések:
|
|
(13.66) | |
|
|
(13.67) |

a bemeneti mátrix esetében:
|
|
(13.68) | |
|
|
(13.69) |

Az állapottér modell segédegyenletével határozható meg a keresett változó, esetünkben a pozíció értéke. Ez közvetlenül a kimeneti mátrix egyszerű felírásából kaphat, hiszen a pozíció az egyik állapotjelző is:
|
|
Fontos kihangsúlyozni, hogy ez a felírás csak minden egyes pontban linearizált esetre igaz, továbbá jelen állapottér modell a szelep működését leíró nyitási keresztmetszet, illetve áramlási karakterisztikáit nem tartalmazza! Ezzel együtt látható, hogy a működés szempontjából legfontosabb összefüggés a mozgásegyenlet. A nyomások kialakulását leíró összefüggésekkel jelen a felírás csak becslést ad a dugattyú mozgására.
A rendszer működésének valósághű modellezésére, a fejezetben leírtaknak megfelelően, csak teljes körűen megalkotott, és a valós paraméterek (súrlódási együttható, nemlineáris karakterisztikák) identifikációval történő meghatározása után nyílik lehetőség.
Szakirodalom
[13.1.] Az áramlástan alapjai. Budapest . 1992.
[13.2.] Grundlagen der Gasdynamik. Springer-Verlag. 1976.
[13.3.] Grundlagen der Pneumatik. Carl Hanser Verlag. 2012.
[13.4.] Modular Pneumatic Linear Drive Systems catalouge. Hoerbiger-Origa.
[13.5.] Pneumatikus teljesítmény-átviteli rendszerek áramlástani jellemzői Ph. D. értekezés. Budapest. 2008.
[13.6.] Grundlagen der Fluidtechnik: Teil 2: Pneumatik. Shaker Verlag. 2006.
14. fejezet - Aktív rezgéscsillapító szakaszának modelljei és a szabályozások tervezése
- 14.1. A rezgéscsillapítás „referencia problémája” és átviteli függvényei
- 14.2. A szemiaktív pneumatikus rezgéscsillapító
- 14.3. Aktív mechatronikai rezgéscsillapító szakaszának tervezése
- 14.4. A dinamikus erő kompenzátor uk(t) bemenő jelének meghatározása
- 14.5. A kompenzáló hatás igazolása kísérleti modellen végzett mérésekkel
- 14.6. Aktív rezgéscsillapító 3D modellje és szabályozása
- Szakirodalom
Az ultraprecíziós technológiákra jellemzők a rezgésekre különösen érzékeny mérő és gyártó berendezések. Az „ultraprecíziós” jelzővel ellátott technológiák valójában gyűjtő fogalmat takarnak, mert ezek közé tartoznak napjaink vezető technológiái. Ilyenek a mikroelektronika gyártóeszközei, MEMS: Micro Electro Mechanical Systems gyártóeszközei, MEOMS: Micro Electro Optical Mechanical Systems gyártóeszközei, a litográfiás technika eszközei, a gépipar ultraprecíziós CNC esztergagépei és köszörűgépei, a két-és háromkoordinátás mérőgépek, stb. Mindezen berendezések megfelelő működésének komoly környezeti feltételrendszere van. Ezek közül csak néhányat említünk, ilyen a levegőtisztaság (fokozatai: 10, 100, 1000, 10 000 nanométer méretű, lebegő szennyező részecske a munkatér 1m3 –ében), a levegő páratartalma, légnyomás, környezeti rezgések.
Az ultraprecíziós technológiákhoz igényelt rezgéscsillapítás tervezése során nem lehet abból a feltételezésből kiindulni, hogy egy épületszerkezet, például födém, jobb esetben „ház a házban” kivitelezésben megépített laboratóriumban a földszint, vagy alagsor padlózata nyugalomban lenne. Nincs nyugalomban, és a födémet, vagy a padlózatot semmi esetre nem lehet vref=0 referencia sebességként értelmezni. Az ultraprecíziós technológiák világában nincsen olyan fix pont, amelyhez képest megengedett lenne a mozgások viszonyítása. Mivel ilyen fix pont nincsen, ezért célszerűbb a mechanika keresztváltozóját, a sebességet alkalmazni, és az adott tér minden pontjának sebességét abszolútnak tekinteni. Abszolútnak, mert minden pont a nehézségi erőtérben mozog, és a vonatkoztatás is ennek megfelelően történik, tehát a Föld „középpontjának” sebességét tekintjük zérusnak (esetünkben a bolygónk Naprendszerhez viszonyított mozgása irreleváns), és erre vonatkoztatjuk minden rezgő pont, test sebességét. Sokan megszokták, hogy egyszerűbb rezgéstani feladatok esetében a környezet, padlózat, stb. sebessége a vref=0 vonatkoztatási pont. Ez a szemlélet a vizsgált ultrapracíziós rendszerek esetében alkalmatlan a rezgéscsillapítási feladat megoldására.
A továbbiakban néhány fontos gondolat a rezgéscsillapítással kapcsolatos „aktív” és „passzív” jelzőkről. Az akusztika és a rezgéstan egyik ipari szempontból kiemelten fontos szakterületén, a zaj-és rezgéscsökkentésben, korábban más volt a két jelző értelmezése. A két jelzőt még napjainkban is nem rendszertechnikai szemlélettel alkalmazzák, amely szerint aktív az a rendszer, amelyik szabályozással rendelkezik, és segédenergia igénybevételével a megváltozott feltételekhez alkalmazkodni képes, valamint passzív az, amelyben nincsen segédenergia, kizárólag passzív rendszertani elemekből épül fel. A zaj-és rezgésvédelemben, a szakterület céljainak megfelelően, aktív a zaj-és rezgéscsillapítás akkor, ha a zaj-és rezgésforrás által kibocsátott energia csökkentését tűzi ki célul, és passzív akkor, ha a rezgésforráshoz és környezetéhez nem nyúlunk hozzá (technikailag kivitelezhetetlen, túl költséges, stb.) hanem a zajoktól és rezgésektől megvédeni kívánt egységet látjuk el „passzív” védelemmel.
Esetünkben tehát nem a zaj-és rezgésvédelem osztályozását, hanem a rendszertani értelmezést alkalmazzuk. Aktív az a rezgéscsillapítás, amelyben egy (több) szabályozás segítségével mintegy „ellene hatunk” a zavaró tényezőknek (pl.: padlózat rezgése), külső energia bevitelével kompenzáljuk ezeket. Passzív a rezgéscsillapítás akkor, ha az csupán arra korlátozódik, hogy passzív szűrőként bizonyos gerjesztő hatásokat (padlórezgés, erőhatások csillapítson). Ebben a fejezetben lesz még említés „szemi”(fél)aktív rendszerről is. Ez azt jelenti, hogy van ugyan a rezgéscsillapító berendezésben szabályozókör, de az csak bizonyos típusú gerjesztések, változások kompenzálására alkalmas. Hogy ne maradjon homályban az ilyen típusú eszközök mibenléte, jelezzük, hogy a méréstechnikában és optikában elterjedten alkalmazott, pneumatikus szabályozással ellátott rezgéscsillapító asztalok mindegyike szemiaktív, mert csak az asztalra ható erők kompenzálására alkalmas. Ha megváltozik a mérő-vagy gyártóberendezés elrendezése, és ennek következtében a súlypont, akkor a súlypontváltozás következtében megbillent asztallap eredeti (vízszintes) helyzetét a pneumatikus szabályozás kiegyenlíti. A padlózat felől érkező rezgések szempontjából ezek a rendszerek passzív csillapítóként, aluláteresztő szűrőként működnek.
A következő ábrákon szemiaktív pneumatikus rezgéscsillapító rendszer részeit (a többcélú asztalt és a különféle magasságú szabályozott pneumatikus lábazatokat), valamint egy jellegzetes interferometrikus elrendezést láthatunk.
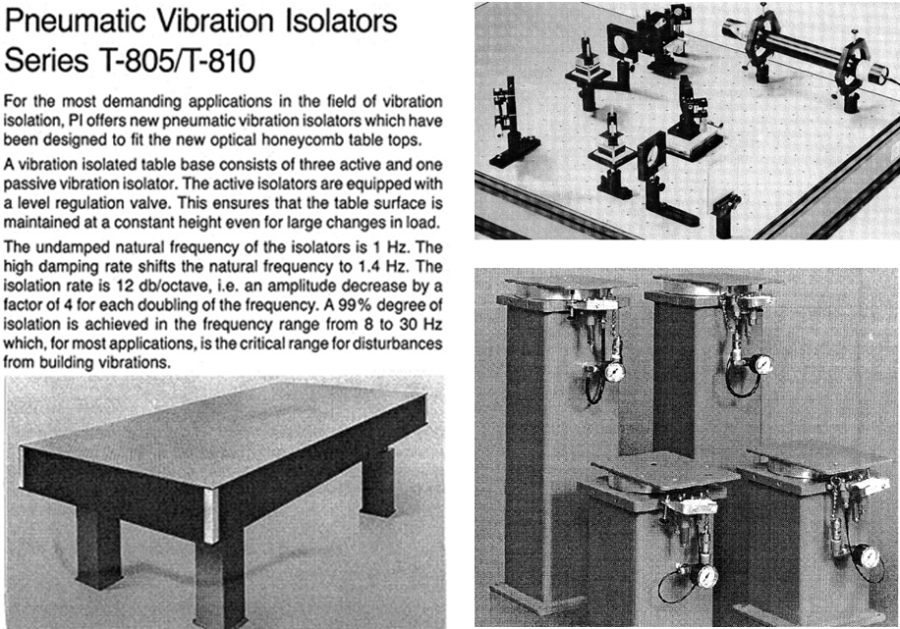
A tématerület régóta igen terjedelmes szakirodalommal rendelkezik, ennek még a tömör összefoglalására sem vállalkozhatunk, mert a jegyzet célja a modellezés és tervezés. A aktív rezgéscsillapítás ugyanakkor egy igen jellegzetes mechatronikai feladat, a szerző PhD dolgozatának témája volt a 90-es évek elején, ld.: A. Huba: Mechatronischer Schwingungsisolator für die Ultrapräzisionstechnik, 1994. [14.1.]. Helyszűke miatt, a rezgéscsillapítással foglalkozó munkák közül csak egyetlen, gyűjtő jellegű könyv két kiadását említjük: C. M. Harris, Ch. E. Crede: Shock and Vibration Handbook, 1976. [14.2.], és az új ismeretekkel bővített, hatodik kiadás: Harris’ Shock and Vibration Handbook, 2009. [14.3.].
14.1. A rezgéscsillapítás „referencia problémája” és átviteli függvényei
A bevezető után néhány egyszerű és általánosan alkalmazott modell segítségével igyekszünk bemutatni a legfontosabb problémát, ami a referencia megválasztásával függ össze. Láttuk, hogy kis amplitúdójú, de káros és csillapítandó környezeti rezgések esetében nincs mód „fix”, azaz nyugalomban lévő pont kijelölésére, mert rezeg az épület, és un. hajlító hullámok formájában „mozog” a padlózat is.
Egy általános ultraprecíziós berendezésre az alábbi ábrán megjelölt gerjesztések hatnak. Erő (átmenő változó forrás) típusú gerjesztések a berendezésben található rezgésforrások (motorok, stb. technológiai és inerciaerői), amelyek közvetlenül és áttételesen hathatnak, és a kezelő személyek (robotok) által végrehajtott beavatkozások. Sebesség típusú (keresztváltozó forrás) a padlózat „le nem fogható” rezgése.
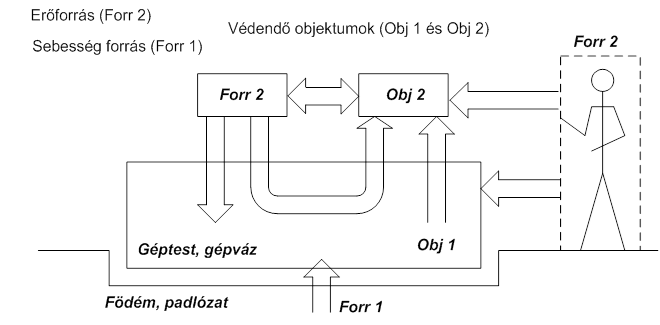
A (14.1. ábra) ábrát alapul véve nézzük meg a rezgéscsillapítás legegyszerűbb modelljeit, kizárólag a függőleges irányú mozgásokat vizsgálva. Tekintettel arra, hogy a szemiaktív rezgéscsillapítók a padlózat (födém) felől jövő sebesség gerjesztések tekintetében lényegében pontosan ugyanolyan frekvencia átviteli tulajdonsággal rendelkeznek, mint a passzív társaik, közös ábrán lehet őket ábrázolni. A szemiaktív rezgéscsillapítók „aktivitása” az asztalra ható erők kompenzálására vonatkozik.
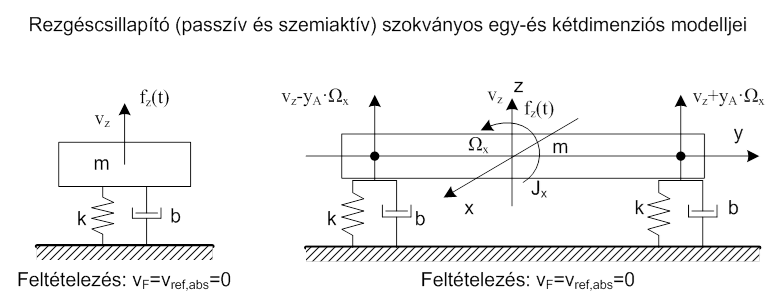
Látjuk, hogy a modellekben a padlózat mozgását nem vették figyelembe, feltételezték, hogy a padlózat sebessége zérus, és megegyezik az abszolút vonatkoztatási sebességgel.
Ebben az esetben csak az erő lehet ésszerű gerjesztő forrás. A tömegre ható sebesség gerjesztés azt jelenti, hogy a tömeg-rugó-csillapítás párhuzamos rendszeren „előírjuk” sebességet, amely persze nem más, mint a tömeg sebessége. Ennél fogva nincs megoldandó differenciálegyenlet, mert a három elemmel a keresztváltozó forrás párhuzamosan van kapcsolva.
A baloldali modell esetén, ha a gerjesztő erő a tömeg súlypontjára hat, az átviteli függvény az Ohm törvény segítségével, egyszerűen megadható. A jobboldali modell esetében az erő már a súlyponttól eltérő helyen is hathat, ezt megfelelő erőkarral kell figyelembe venni. Jelenlegi vizsgálódásaik szempontjából azonban ez az utóbbi modell nem fontos, tehát nem részletezzük. A későbbiekben lesz olyan rezgéscsillapító asztal modell, ahol az „x” és „y” tengelyek körüli forgásokat is figyelembe vesszük.
|
|
(14.1) |
Az átviteli függvényből látjuk, hogy DT2 tagról van szó, amely sávszűrőként működik, tehát bizonyos frekvencia tartományban sajnos átengedi az erőgerjesztéseket.
Nézzük, milyen átviteli tulajdonságokat mutat egy valódi, a padlózat sebességét is figyelembe vevő modell.
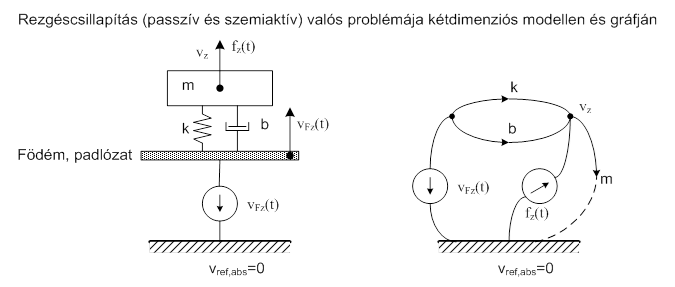
A (14.4. ábra) ábrán látható gráf az egyszerű, veszteséges rugalmassággal alátámasztott rezgéscsillapítót és a szemiaktív pneumatikus rendszert is egyaránt modellezi. Ez utóbbi esetében előfordul, hogy a lábazatban egy helyett két pneumatikus kamra (mint légrugó) van, de ez a frekvenciameneten lényegileg nem változtat. A födém alacsony frekvenciás rezgései akadály nélkül átjutnak a védett objektumra (asztalra).
Az ultraprecíziós (UP) rezgéscsillapítás esetében tehát különösen fontos megakadályozni a födém sebesség átvitelét az asztalra. A legegyszerűbb, ha az átviteli függvények felírásához ismét az impedancia módszert alkalmazzuk. Az átviteli függvény egy egyszerű keresztváltozó osztó, hiszen VA (az asztal függőleges sebessége) a kimenet és VF (a födém/padlózat függőleges sebessége) a bemenet. A sebességeket abszolút értelemben használjuk, vonatkoztatás a nehézségi erőtér vref=0 idealizált pontja.
|
|
(14.2) |
Szokásos alakban:
|
|
(14.3) |
A passzív és a szemiaktív rezgés csillapító tehát nyilvánvalóan nem képes csökkenteni alacsony frekvenciákon a födém felől érkező rezgéseket. Az átviteli függvény számlálójából látjuk, hogy ez a csillapító hatás csak az ωs1=k/b körfrekvencia felett következik be.
A fent leírt dinamikus viselkedést visszaigazolják a következőkben bemutatott frekvenciamenetek, amelyeket műszaki adatlapokból „ollóztunk” ki. A leírást azért mutatjuk be változtatás nélkül, hogy az aluláteresztő szűrő jelleggel kapcsolatos megállapításaink alátámasztást nyerjenek.
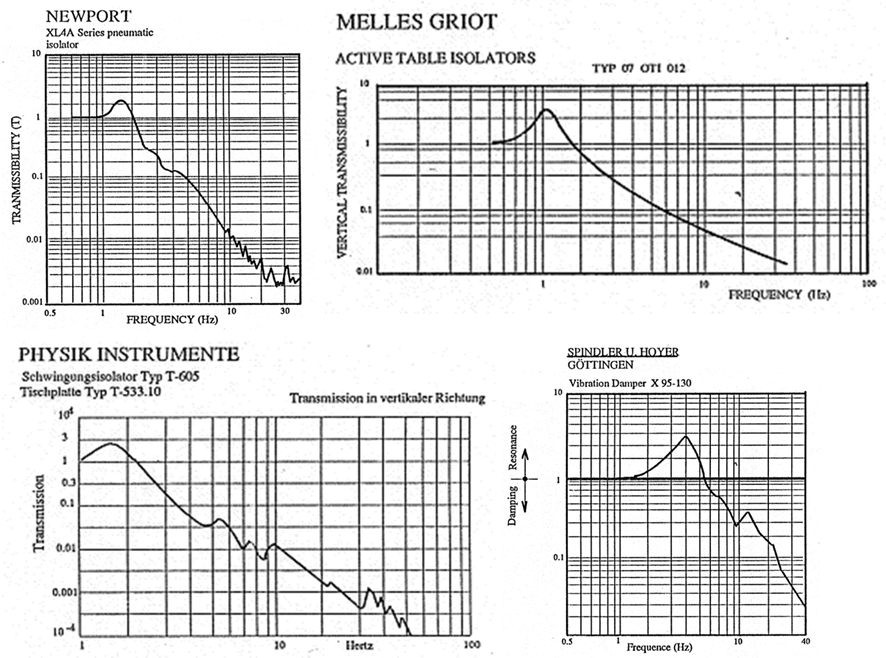
Ugyanezek a passzív és szemiaktív rendszerek azonban szerencsésebb működést mutatnak az asztalra ható erőkre vonatkozóan. Ennek igazolására felírjuk az erő-átviteli függvényét is. Erő bemenetre a három impedancia ugyanúgy párhuzamosan kapcsoltnak „látszik”, mint a 14.1. egyenletben bemutatott rendszernél, mert a vF forrást rövidre kell zárnunk (szuperpozíció):
|
|
(14.4) |
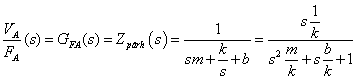
Látható, hogy a rezgéscsillapító erre a bemenetre sávszűrőként működik, azaz az áteresztő sávon kívül mind az alacsony, mind pedig a nagyobb körfrekvenciák tartományában megfelelően csillapít.
14.2. A szemiaktív pneumatikus rezgéscsillapító
Az előző, 14.1. szakasz fejezetben olvashattuk, hogy a szemiaktív pneumatikus rezgéscsillapító tulajdonképpen a passzív rezgéscsillapítóhoz hasonló frekvencia átviteli tulajdonságokat mutat. Hatalmas előnye ugyanakkor, hogy a statikus deflexió (összenyomódás), ami a passzív gumi, vagy fémrugók esetében elkerülhetetlen, ennek a rendszernek az esetében pneumatikus szabályozással kiegyenlíthető. Jeleztük, hogy a lábazatokban egy, vagy két pneumatikus üreg (kamra) van, lényegét tekintve tehát ez a rendszer nem más, mint egy (veszteséges) légrugóval ellátott, tömeg-rugó rezgő rendszer. A két kamra és a közöttük lévő fojtószelep csupán kis mértékben változtatja a frekvenciamenet meredekségét. A szabályozás itt arra szolgál, hogy az asztal előre beállított helyzetét az asztalra ható erőterhelések hatására megtartsa. Rendszerint 3 lábazat a 4 közül pneumatikus szabályozással rendelkezik, a negyedik láb légrugójában un. referencia nyomást és magasságot állítanak be. Három láb alkalmazása csak kisebb rendszereknél jön szóba, mert négy láb esetén, az asztal síkjában, csaknem tetszőleges pontokon terhelhető.
Nézzük a klasszikus pneumatikus szemiaktív rezgéscsillapító „lelkét” képező lábazatot, a légrugót. A következő ábrán, a baloldali képen egy pneumatikus lábazat műszaki rajza látható, és mellette jobboldalon külön megjelenítettük a gördülő membránt. Ez a gépelem a légrugó esetében kiemelkedően fontos szerepet játszik. Feladata a tömítés olyan módon, hogy a tömeget (asztalt) hordozó dugattyú és a lábazat fala között minél elhanyagolhatóbb legyen a súrlódásos kapcsolat. A gördülő membrán egy hálós merevítésű, de igen rugalmas műgumi kompozit, rugómerevsége gyakorlatilag szinte alig érzékelhető. Önmagában tehát képtelen lenne a tömeget megtartani, felfújás nélküli állapotban a dugattyú felső pereme nyugszik a lábazat felső karimáján, a jobboldali képen látjuk. Baloldali műszaki rajzon ábrázolt lábazat dugattyúja is rendelkezik karimával, amit az a félnézet-félmetszet képen látható.
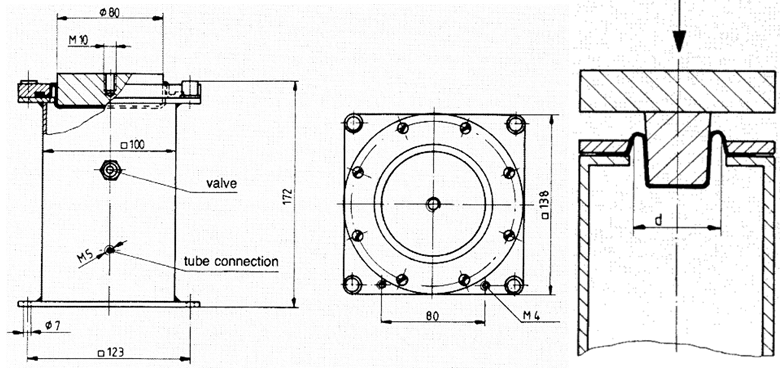
A műszaki rajz alapján elkészítettük egy kétkamrás lábazat működési vázlatát és struktúra gráfját, ez a következő ábrákon látható. A lábazat a vF abszolút függőleges sebességgel mozgó padlózaton áll. A rezgésvédett asztal tömegét a dugattyúra helyezett „m” jelzi. A pneumatikus szabályozás alapjele az asztal és a padlózat (lábazat) között beállított távolság. A szabályozás értéktartó, mert amint az asztal és a padlózat (lábazat) közötti relatív távolság megváltozik, a szelep vagy táplevegőt enged a felső kamrába, vagy lefúj. A működési vázlaton a pneumatikus szelepet rácsozott négyszög jelzi, és felette látható a rugós visszatérítésű szelepműködtető csap, a végén görgővel. A függőleges szelepmozgató csapot egy változtatható karhosszúságú egykarú emelő nyomja a szelepházba, vagy éppen kifelé engedi mozogni. A szelep karakterisztikájával a későbbiekben foglalkozunk majd, a vázlaton látható szelepfüggvény bővebb magyarázatot igényel. A kar-arány és a szelep karakterisztika adja az arányos szabályozó „Ac” arányos tényezőjét.
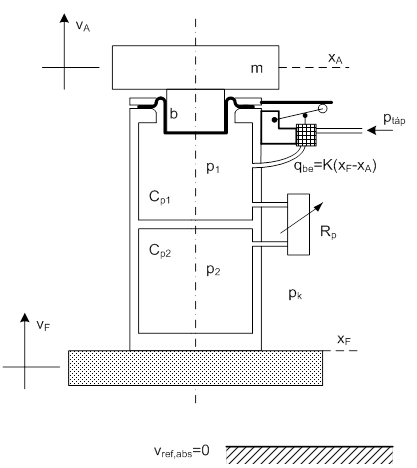
A szerkezeti (és működési) működési vázlat az ultraprecíziós technikában döntő szerepet játszó födém (padlózat) rezgés vFz(t) asztalra történő átvitelét mutatja. A vázlat alapján szerkesztettük meg a struktúra gráfot, és a teljesség kedvéért feltüntettük az fz(t) asztalra ható erőgerjesztést is.
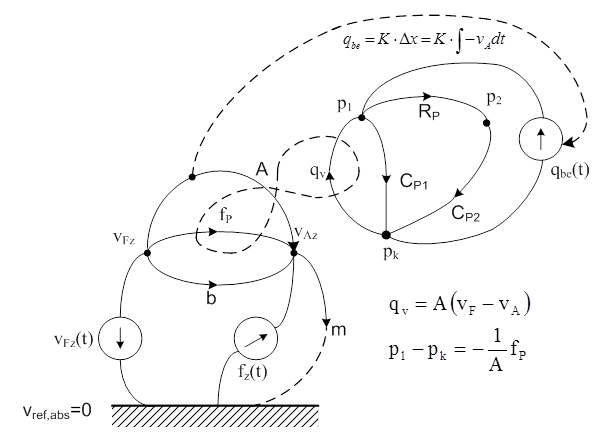
Az ábrán látható gráf tartalmazza a szakaszt és az arányos szabályozás szabályozó körét is. A szakasz mechanikai részében „b” csillapítási tényező alakjában foglaltuk össze a mechanikai veszteségeket. A mechanikai részt fordító váltó kapcsolja „A” állandóval a pneumatikus rész felső kamrájához. A födém kis amplitúdójú rezgései a szelep karakterisztikában nem játszanak szerepet, ezért jeleztük Δx helyén a –vA asztal sebesség integrálját, mint a szelep nyitásáért felelős mennyiséget. A szelep ugyanis úgy működik, mint egy vezérelt átmenő változó forrás. Az állandó ptáp tápnyomás az állítható fojtású szelepen keresztül juttatja a kamrába a qbe térfogatáramot, attól függően, hogy a Δx relatív elmozdulás mekkora.
Nézzük tehát a szabályozható állású fojtószelep működését és karakterisztikáját.
Szelepműködés általános leírása
A szelep működtetése a födém (lábazat) és az asztal relatív mozgásán alapszik. Azt feltételezzük, hogy a födém elmozdulás amplitúdója összemérhető az asztaléval. Valójában egy igen extrém (lehetetlen) esetet tükrözne, ami az UP rezgéscsillapítás esetében nem érvényes. A szemiaktív rezgéscsillapítók azonban nem is arra a célra készülnek, hogy a födém mozgását az asztal irányában csillapítsák. A táplevegő nyomásával ugyanis az asztal megkívánt szintjét/magasságát (vízszintes helyzet) lehet szabályozni, ha pl. terhelés-áthelyezés miatt megváltozna. A födémrezgések amplitúdója normális esetben (gondosan tervezett épület, ház a házban elrendezés, stb.) nem haladja meg a 0.1 mm-t. A pneumatikus szelep ugyanakkor még Δx=1 mm relatív elmozdulásra sem tud nyitni.
Az általános leírásból a valós UP rezgéscsillapító esete azonban levezethető.
Ugyanakkor lehetséges a rendszer más célú felhasználása is, olyan esetekre, ahol az xF(t) elmozdulások amplitúdója lényegesen nagyobb, és összemérhető az xA(t) elmozdulások amplitúdójával, ilyen a járművek esete.
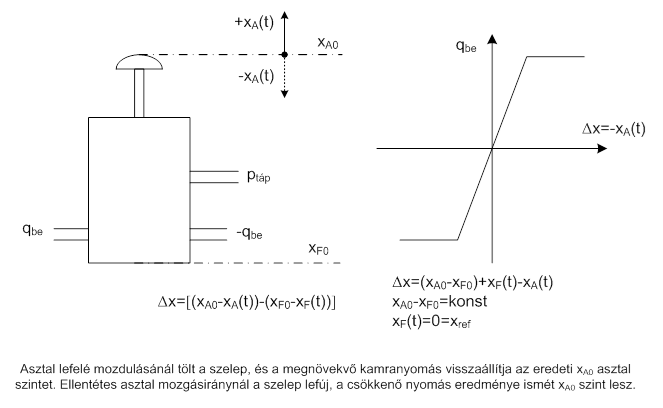
Az ábra baloldalán látható a töltőszelep sematikus képe. A szeleprúd „Δx” relatív elmozdulása nyitja, vagy zárja a szelepet, amelynek a szokásosnál „lomhább” a karakterisztikája. (Normál gyártmányoknál ugyanis egy küszöbértéknyi Δx elmozdulásra azonnal teljes mértékben tölt, vagy lefúj a szelep, ilyen eszközök érzékeny szabályozásra nem alkalmasak.)
A szelep karakterisztika megállapításához szükség van néhány megállapodásra.
Az asztal xA0 és a födém xF0 függőleges helyzetét (lábanként külön-külön) egy elméleti xref szinthez mérjük. A függőlegesen felfelé irányuló elmozdulás pozitív, az ellentétes negatív előjelet kap.
A konstrukcióból eredően xA0–xref > xF0–xref . Felírható ennek alapján a szelepet működtető Δx relatív elmozdulás az általános esetre:
|
|

Természetes, hogy minden alkalmazásra xA0-xF0=konst lesz, ezért a „változásban” nem játszik szerepet. Így egyszerűbben írható fel a relatív elmozdulás:
|
|
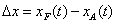
Végül a szelep karakterisztika általános esetre az alábbi lesz:
|
|

Szelepműködés UP rezgéscsillapítóra vonatkozó leírása
Az általános leírásnál már láttuk, hogy a pneumatikus szint-szabályozás az asztal beállított szintjének megtartását célozza, nagyobb mértékű változások esetén. Jeleztük azt is, hogy az UP rezgéscsillapítás esetében a vF(t) födémrezgések amplitúdói nem képesek nyitni a szelepet. Ezért tehát az aktív rezgéscsillapítás esetében a pneumatikus szabályozást figyelmen kívül hagyjuk, a láb kamráját passzív légrugóként modellezzük. A kamra p1 belső nyomása csak a dugattyú kis amplitúdójú rezgéseinek hatására változik (ld.: pneumatikus fordító váltó egyenleteinek levezetését).
Ezért tehát jogosan írhatjuk erre a technikai szerkezetre, hogy vF(t)=0, amiből a módosult szelep-karakterisztika adódik:
|
|

Ha tehát az asztal lapját nagyobb erővel lefelé nyomjuk, azaz Δx=-(-xA) lesz, „életre kel” a pneumatikus szabályozás, nyit a szelep, és a megnövekvő belső nyomás visszaállítja az asztal eredeti helyzetébe.
A fordító váltó egyenletei
Tanulságos a gráfban látható fordító váltó egyenleteinek felírása is. Ebben az esetben nem lehet meggondolás nélkül alkalmazni a munkahengerek, vagy egy referenciához kötött házú légrugó összefüggéseit, mert a vizsgált rendszerben függőleges irányban vF(t) sebességgel mozog a födém és vA(t) sebességgel az asztal is. Ellentétben ugyanis a pneumatikus szabályozással, a fordító váltó működésében már nem lehet figyelmen kívül hagyni a födémrezgéseket! Itt a lábazat (kamrafal) és a dugattyú közötti relatív elmozdulás sebessége a pneumatikus rendszerben történő energiatárolás (ti.: légrugó) leírásához elengedhetetlen.
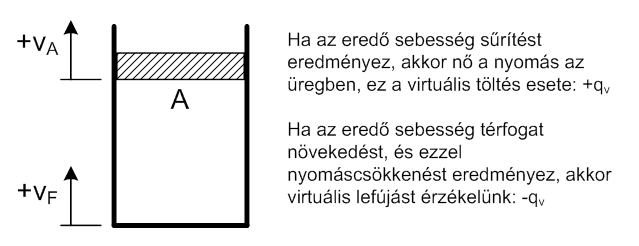
A (14.10. ábra) ábrán látható működési modell alapján elkészítettünk egy táblázatot, amelyben a fordító váltó pneumatikus és mechanikai oldala közötti összefüggéseket foglaltuk össze. Ennek a táblázatnak az alapján könnyen megfogalmazhatóak a keresett átalakító egyenletek.
|
Δv A |
Δv F |
arány |
virtuális töltés: +qv virtuális lefújás: -qv |
|
↑ + |
↓ - |
-q v | |
|
↑ + |
↑ + |
|
-q v |
|
↑ + |
↑ + |
|
+q v |
|
↓ - |
↓ - |
|
+q v |
|
↓ - |
↓ - |
|
-q v |
|
↓ - |
↑ + |
+q v |




A táblázat alapján megszülethet a következtetés, az asztal és födémsebességek és a virtuális térfogatáram közötti összefüggés, mint az átalakító egyik egyenlete:
|
|
(14.5) |
Az átalakító másik egyenletének felírása nem követel ekkora körültekintést, mert az előjelek a felület normálisa és az erő iránya révén adottak.
Végül tehát nézzük a légrugó, mint pneumatikus váltó egyenleteit arra az esetre, ha a henger fala nem referenciához rögzített:
|
|
(14.6) |
Ezek után a (14.8. ábra) ábrán látható gráf alapján már nincs akadálya a csomóponti egyenletek felírásának. Azért választjuk ezt a módszert, mert a későbbiekben, az aktív szabályozás tervezésének során szükség lesz az itt megalkotott állapottér modellre, amelyet természetesen kiegészítünk majd az aktív erőforráshoz tartozó elemekkel.
|
|
Helyettesítsük be a fizikai és az átalakító egyenleteket, miközben szem előtt tartjuk a korábban leírtakat. A pneumatikus szabályozás szempontjából tehát vF(t) padlózat sebességet zérusnak vesszük, az energiatárolás (fordító váltó) esetében nem.
Átrendezés után kapjuk a szemiaktív pneumatikus rezgéscsillapító állapottér modelljét:
|
|
Az állapottér modell alapján megszerkesztjük a szemiaktív pneumatikus szabályozás jelfolyam gráfját, mert ezen az úton lehet a leggyorsabban és szemléletesen felírni az átviteli függvényeket. A jelfolyam gráfban az állapotjelzők deriváltjaihoz tartózó csomópontokat a Laplace-operátorral való szorzással jelöltük. A szerkesztési szabályokról Csáki: Szabályozások dinamikája [14.4.] című munkájának 1.4. fejezetében:
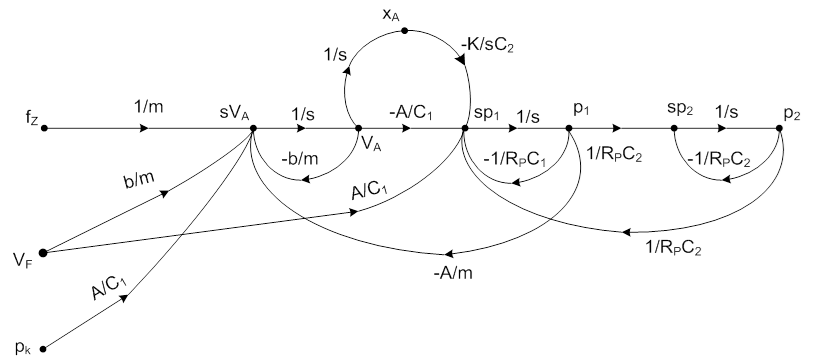
A számításokat helyhiány miatt nem lépésenként mutatjuk meg, hanem igyekszünk azokat a pontokat felvázolni, amelyek segítségével az olvasó könnyen rekonstruálhatja a műveleteket.
A jelfolyam gráf tehát egy szabályozókör matematikai modellje, amelyben két, elemben kapcsolt (összefüggő) hurok található, leszámítva az állapotjelzők eredeti függvényét visszacsatoló kisebb hurkokat. A két kapcsolt hurok a visszacsatolásokról ismerhető fel. Az egyik hurok visszacsatoló ágában (-A/m), a másikéban (1/RpC2) művelet szerepel az éleken. Ezért a zárt kör átviteli függvényének nevezőjében nem szerepel majd a két hurok vegyes szorzata, csupán a két hurokátviteli függvény GH1 és GH2.
A Ger eredő átviteli függvény azon átviteli operációk eredője, amelyek az adott kimenetet és bemenetet „egyenes” úton összekötik, azaz a hurkok hatását itt nem kell figyelembe venni.
A fentiek könnyebb megértéséhez emlékeztetőül álljon itt a jelfolyam gráfok szabályaira vonatkozó néhány fontosabb összefüggés:
Átviteli függvény független hurkok esetén:
|
|
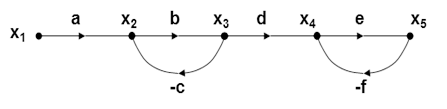

Átviteli függvény elemben, vagy csomópontban kapcsolt hurkok esetén. Ez az eset fordul elő a vizsgált rendszerben:
|
|
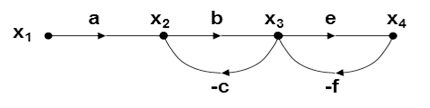
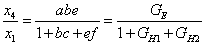
A rezgéscsillapító esetében az elvi összefüggés tehát az alábbi:
|
|
A számítási lépések jól követhetők, ha először a két hurokátviteli függvényt írjuk fel:
|
|
Továbbá
|
|
A következő lépésben összeadjuk a két hurokátviteli függvényt:
|
|
A továbblépés csak akkor megengedett, ha elvégeztük a dimenzióellenőrzést, és mindent rendben találtunk. A zárt szabályozási kör karakterisztikus polinomja a GH1+GH2 eredő átviteli függvény nevezőjének és számlálójának összege.
A méretek, a helyigény miatt, a karakterisztikus polinom általános alakját írjuk fel, és az együtthatókat külön adjuk meg:
|
| ||
|
|

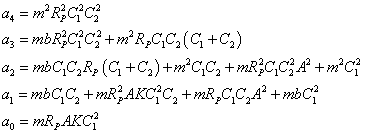
A kifejezések bonyolultak, ezért elvégeztünk egy ismételt dimenzió ellenőrzést, ezúttal azt vizsgáltuk, hogy az a4/a0…a1/a0 együttható osztások eredményeként valóban s4…s (másodperc hatványai) dimenziókat kapunk-e. Az eredmény jó, tehát van értelme a továbblépésnek.
Amikor az előre vivő átvitelt felírjuk, nem szabad elfeledkeznünk a két hurok összegének nevezőjéről, mert ez volt az „emeletes” tört nevezője, midőn a K(s) polinomot létrehoztuk.
Az alábbi kifejezéssel ugyanis a Ger(s) átvitelt szorozni kell!
|
|

Nézzük a jelfolyam gráf alapján a VA(s)/FZ(s) átviteli függvényt, azaz az asztalra ható zavaró erőhatás kompenzálását:
|
|

A zárt kör átviteli függvénye erre a bemenetre és kimenetre, azaz az erőátvitelre, vagy csillapításra:
|
|

Az átviteli függvény azonnal mutatja, hogy a passzív rezgéscsillapítóhoz képest nem sok változás történt. A szemiaktív pneumatikus rezgéscsillapító is sávszűrőként működik az erő bemenetre, csupán a Bode diagram meredeksége változott, hiszen a rendszer negyedrendű lett a másodrendű helyett, bár a számlálóban lévő zárójeles kifejezések rontják a szűrő-karakterisztika meredekségét.
Ha a szabályozott szemiaktív rendszer födém sebesség átvitelét nézzük, akkor első lépésben le kell szögezni, hogy az így vizsgált rendszernek nincsen köze a valóságos ultrapracíziós technikákhoz. Mindazonáltal jeleztük korábban, hogy elképzelhető egy olyan rendszer, amelyben hasonló pneumatikus szabályozással, de nagyságrendekkel nagyobb vF gerjesztő amplitúdóval dolgozunk. Ilyen rezgéscsillapítók már az 1980-as években készültek pl. a holdjárművekben történő alkalmazásra, de nem voltak publikusak. Érdekességük, hogy a talaj egyenetlenségét a jármű elé pozícionált lézersugár segítségével, mintegy „előre” mérték. Ha a feladatot általánosítjuk, akkor az eddig látott módszerrel, a jelfolyam gráf alapján levezethető ez az átviteli függvény is. A levezetést nem visszük végig, csak az eredményt mutatjuk be. Gyakorlás céljából az ellenőrzést az olvasóra bízzuk. Az átviteli függvény számlálójában ismét meg fog jelenni a kiemelhető „s” operátor, azaz a rendszer erre a gerjesztésre is sávszűrőként fog működni. Ennek oka a pneumatikus szabályozóban lévő integrálás, amelynek során a vA jelből a szelepkonstrukció xA elmozdulást hoz létre. Az átviteli függvényből kiolvashatjuk, hogy a rendszer normális működésének feltétele, hogy a mechanikai csillapítás nagyobb legyen, mint a fojtószelep ellenállásából számított egyenértékű csillapítás. Magyarra fordítva: Ilyen típusú rezgéscsillapító esetében teljesen felesleges a két kamra (és közöttük a fojtás) alkalmazása, a tervező ilyesmivel csak a saját baját szaporítaná.
|
|

Az ultraprecíziós technikák szempontjából sokkal fontosabb annak vizsgálata, hogy a szemiaktív pneumatikus rezgéscsillapító milyen körülmények között képes a padlózat (födém) alacsonyfrekvenciás rezgéseit csillapítani. Mielőtt felírjuk a sebesség átvitel függvényét, fontolóra kell venni minden valóságos feltételt.
A jelfolyam gráf ebben az esetben módosul, ki kell kapcsolnunk a pneumatikus szabályozókört, mert korábban már hosszan értekeztünk arról, hogy a kis amplitúdójú födémrezgések nem képesek működésbe hozni a szelepet. A sebesség átvitel tekintetében a szemiaktív pneumatikus rezgéscsillapító tehát passzív rendszerként működik, amely természetesen másodrendűnél magasabb rendszámú.
Nézzük tehát a módosított jelfolyam gráfot, a kikapcsolt szabályozással:
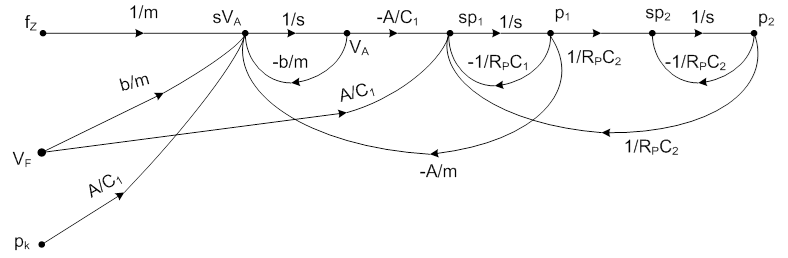
Megváltoznak természetesen a GH1 és GH2 hurkok:
|
| ||
|
|
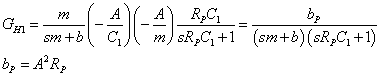

A két hurok összegének kiszámítása szükséges a karakterisztikus polinom meghatározásához:
|
|

A fenti törtfüggvény számlálójának és nevezőjének összege lesz a keresett átviteli függvény karakterisztikus polinomja. Tekintettel arra, hogy az összefüggés terjedelmes, az együtthatókat ismét külön tüntetjük fel. Tekintettel arra, hogy elmarad a szabályozásból az integráló jelleg, a rendszer csak harmadrendű lesz.
|
|

ahol
|
|
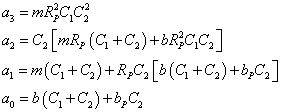
A dimenzió ellenőrzés elvégzése után továbblépünk és a jelfolyam gráf alapján felírjuk a keresett átviteli függvény előre vivő ágát, de nem szabad elfeledkezni az átviteli függvény nevezőjében létrehozott közös nevezővel való szorzásról sem, hiszen „emeletes” törttel van dolgunk:
|
|
Tekintettel arra, hogy a két kamra közötti pneumatikus fojtásból kiszámított egyenértékű csillapítás sokkal nagyobb, mint a gördülő membrán csekély csillapítása bP>>b, a fenti képletben a legelső tagot elhagyjuk. A két sebesség ezután ellenfázisú lesz (negatív előjel).
Ilyen feltételek mellett a keresett átviteli függvény az alábbi formát nyeri:
|
|

A dimenzióellenőrzést sikeresen végrehajtottuk. Ezt követően sajnos megállapítható, hogy matematikai úton is igazolást nyert a feltételezés: A szemiaktív pneumatikus rezgéscsillapító a kis amplitúdójú födémrezgésekre nem aktiválja a szelepet, és ennek folytán a rendszer a passzív rezgéscsillapítókhoz hasonló módon aluláteresztő szűrőként működik, azaz az alacsony frekvenciás rezgéseket csillapítás nélkül átengedi az asztalra.
A megoldás tehát egy aktív rendszer kidolgozása, amely esetében a födém sebesség folyamatos mérése mellett lehetséges a rendszerbe szabályozott erő érintésmentes bevitele. Amikor a födém felfelé mozdul, az erőhatásnak az asztalt lefelé, a födém irányába kell húznia, és fordítva. Ezek a dinamikus erők természetesen lényegesen kisebbek, mint azok a statikus erők, amelyeket a pneumatikus szabályozókör segítségével kompenzálunk (asztal szintszabályozása).
Kérdés tehát, hogy mi lehet az az erő generátor, amely megfelelő függvénnyel megfogalmazott parancs alapján, érintésmentesen erőt képes vinni a rendszerbe?
14.3. Aktív mechatronikai rezgéscsillapító szakaszának tervezése
Az előző fejezet végén feltett kérdésre adunk választ, amikor aktív mechatronikai rendszer tervezését tűzzük ki célul. A módszeres tervezéshez ismét vissza kell nyúlnunk arra a jelfolyam gráfra, amely a légrugós mechanikai rezgéscsillapítót ábrázolta, de annyit módosítunk, hogy a számítások egyszerűbbé tételére a két pneumatikus kamrát egyesítjük. Ez a gyakorlatban a fojtószelep kinyitásával történik. A két kamra egyesítése a frekvenciamenetben a görbe meredekségének csökkenését eredményezi, mert a rendszám csökken, a meredekség -40 dB/dekád helyett -20 dB/dekád lesz.
Az egykamrás pneumatikus, szemiaktív rezgéscsillapító struktúra gráfját a módosítás után kapjuk. Az elképzelésünket „belefogalmaztuk” a gráfba, a födém (padlózat) és az asztal közé kapcsolt kompenzáló erőforrás fkomp formájában. Ebben az esetben tehát nem a szokványos modellezési utat járjuk, ami lényegében analízis, hanem szintetizálni kívánunk egy új rendszert.
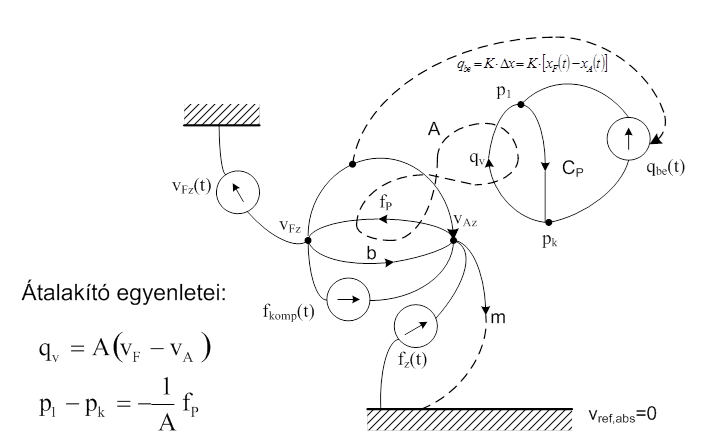
A gráfon látható elképzelést működési modell, pontosabban szabályozástechnikai tömbvázlattal kombinált formában is megrajzolhatjuk, ezt mutatja a következő ábra. A képen két szabályozó rendszert látunk. A baloldali az ismert, és korábban részletesen levezetett szemiaktív pneumatikus, értéktartó szintszabályozást ábrázolja úgy, hogy lényegében a légrugó rugómerevségét változtatjuk. A baloldali szabályozókör tehát a (nagy) statikus erők (terhelés) kompenzálására alkalmas. A jobboldali már egy új szabályozókör, amelyik a dinamikus erők kompenzálását lenne hivatva elvégezni.
A mechanikai referencia problémát figyelembe véve ennek a szabályozásnak a megtervezése nem egyszerű feladat. Látjuk a struktúra gráfon, hogy a nehézségi erőtér erre a célra nem használható ki, a szabályozott erőgenerátort fizikailag csak a födém (padlózat) és a védett tömeg közé lehet kapcsolni. Jelen ismereteink szerint érintésmentesen csak villamos (elektromechanikus) úton lehet a szerkezet adott két pontja közé erőt bevinni. Az elektrosztatikus út a rendszer méreteit és az egyéb körülményeket figyelembe véve ezúttal nem jöhet szóba. Így nem marad más, mint az elektrodinamikus elv, amely a rendszerhez adaptálva csak úgy képzelhető el, hogy a permanens mágneses mezőt szolgáltató állandó mágnes (esetleg gerjesztett elektromágnes) a tömege miatt a padlózaton kerül elhelyezésre, és a mágneskör légrésében érintésmentesen lineáris mozgást végző un. merülő tekercs az asztal aljára van erősítve.
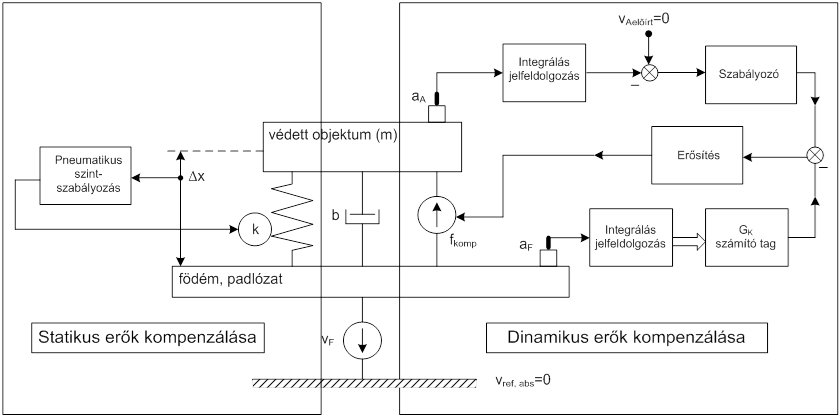
További igen fontos kérdés, hogy mi legyen az alapjel? Már leírtuk, hogy „panta rei”, azaz minden mozgásban van, tehát a szint (magasság), azaz az elmozdulás, illetve szint nem lehet fix érték. Az asztal gyorsulása sem lehet alapjel, mert aA(t)=0 esetében az állandó sebesség lehetséges, és ez nem kívánatos. Hála a rendszertechnika változóinak (kanonikus változók) éppen az asztal vA(t) sebessége az, amelyik alapjelként felhasználható. Gondot csak az egyenes vonalú mozgás „abszolút” sebességének mérése jelent, erről a későbbiekben még lesz szó. Az abszolút jelző, arra utal, hogy a mérés során a sebességet a nehézségi erőtér vonatkoztatási rendszeréhez viszonyítottan kell értelmezni. Ilyen eszközök a szeizmikus (elektrodinamikus) sebességérzékelők.
A jobboldali szabályozókör szabályozója PD jellegű, hogy a lineáris motor L/R időállandója által okozott törést kompenzálni lehessen. Ezzel a körrel a továbbiakban nem foglalkozunk, legyen elég annyi, hogy a szabályozó paramétereit a szakasz konkrét paramétereinek ismeretében számítottuk ki, és állítottuk be a 35° körüli fázistartalékot.
Az új, aktív rendszer felépítésének vázlatát a következő ábra mutatja.
A 3D vázlaton „A” jelöli az asztal lapját, „B” a négy alátámasztás, amelyekből három kettős rendszerből áll, a „C” pneumatikus (egy, vagy kétkamrás) láb pneumatikus szintszabályozással a statikus erők kompenzálására, és „D” az elektrodinamikus lineáris motor a dinamikus erők kompenzálására, ez mind a négy lábazatnál van. A „B” alátámasztások közül egy passzív, csupán a kívánt asztal-szint beállítására szolgál. Az „E” jelű elektrodinamikus erő-kompenzátorra csak akkor van szükség, ha a pneumatikus lábak gördülő membránjai nem tudnak megfelelően működni, a dugattyúk nem állnak a láb tengelyében, és a „z” tengely körüli gerjesztő nyomatékokat más módon nem lehet kompenzálni.
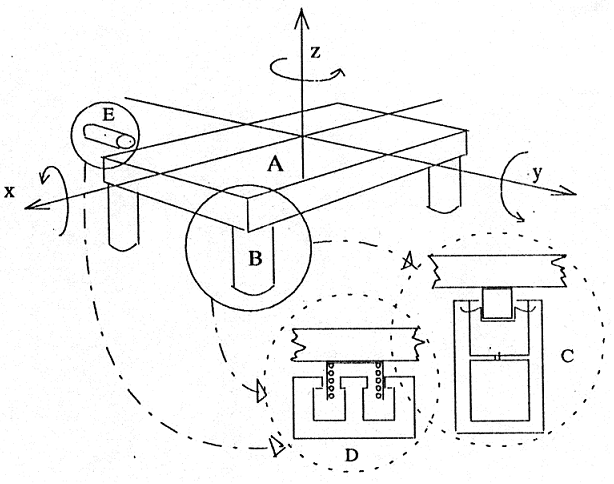
A leírtaknak megfelelően kiegészítjük a struktúra gráfot a lineáris motor elektromechanikus váltójával. A váltó egyenleteinek meghatározása nem automatikus, hiszen a mechanikai rendszer két pontja egymáshoz képest relatív mozgást végez. Ezért az elektrodinamikus váltó egyenleteinek meghatározására külön gondot fordítunk.
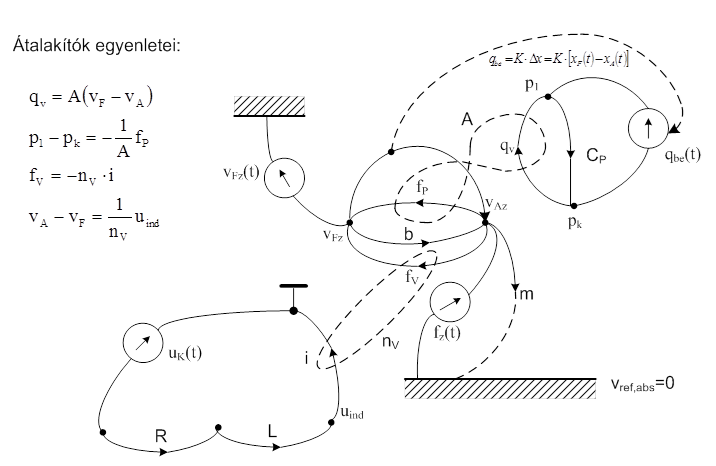
A struktúra gráfon látszik, hogy a villamos rendszer referenciája „lebeg”, nincs sem a padlózathoz, sem a tömeghez kötve, és ez az elektrodinamikus erő-becsatolás nagy előnye. A szabályozásokat a következők során szétválasztjuk. A következő ábrákon és a levezetéseken a pneumatikus szintszabályozás már nem fog megjelenni, mert az a nagy, statikus erők kompenzálását szolgálja. Figyelmünket a dinamikus erők kompenzálására fogjuk koncentrálni, ezek igen kis amplitúdójú rezgésekkel kapcsolatosak.
Elsőként meg kell határozni az elektrodinamikus váltó egyenleteit.
A merülő tekercs árama által átjárt  vezetődarab, és a
vezetődarab, és a  mágneses indukció hatására keletkező
mágneses indukció hatására keletkező  Lorentz erő iránya közötti kapcsolat nem jelent gondot. A relatív mozgás miatt nem ilyen egyszerű az indukált feszültség előjelének meghatározása. A mozgó alkatrészek egymáshoz való viszonyát és a légrésben mozgó tekercsben indukálódó feszültség előjelét gondos elemzés alapján kell leírni. Ezt segíti a következő ábra, amelyen a tekercs egy darabját megvastagított vonal jelöli. A vezető darab +vA és –vA sebességgel mozoghat a
Lorentz erő iránya közötti kapcsolat nem jelent gondot. A relatív mozgás miatt nem ilyen egyszerű az indukált feszültség előjelének meghatározása. A mozgó alkatrészek egymáshoz való viszonyát és a légrésben mozgó tekercsben indukálódó feszültség előjelét gondos elemzés alapján kell leírni. Ezt segíti a következő ábra, amelyen a tekercs egy darabját megvastagított vonal jelöli. A vezető darab +vA és –vA sebességgel mozoghat a  mágneses mezőhöz képest merőlegesen, miközben a mágneses mezőnek a sebessége +vF és –vF lehet. Ezeket a sebességeket abszolút értelemben kell venni, a vonatkoztatás, akárcsak a mechanikában, a vref=0.
mágneses mezőhöz képest merőlegesen, miközben a mágneses mezőnek a sebessége +vF és –vF lehet. Ezeket a sebességeket abszolút értelemben kell venni, a vonatkoztatás, akárcsak a mechanikában, a vref=0.
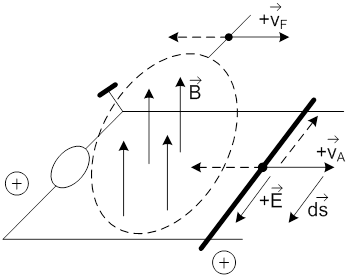
Az alábbi táblázatban, az első két oszlopban úgy jelöltük a tekercs és a mágneses mező (padlózathoz kötött) sebességeit, mintha azok egy abszolút referencia ponthoz képest mozognának.
|
Δv A tekercs |
Δv F mágn. indukció |
arány |
|
|
|
↑ + |
↓ - |
+ |
+ | |
|
↑ + |
↑ + |
|
+ |
+ |
|
↑ + |
↑ + |
|
- |
- |
|
↓ - |
↓ - |
|
- |
- |
|
↓ - |
↓ - |
|
+ |
+ |
|
↓ - |
↑ + |
- |
- |






A táblázat alapján felírható a keresztváltozók közötti váltó egyenlet, tehát a feszültség előjele és a két mechanikai pont egymáshoz viszonyított mozgása tehát egyenlet formájában rendelkezésre áll.
|
|
A váltó átmenő változók közötti egyenlete:
|
|

14.4. A dinamikus erő kompenzátor uk(t) bemenő jelének meghatározása
Célunk, hogy a lineáris motorral kiegészített mechanikus-pneumatikus rendszer matematikai modellje alapján meghatározzuk azt az uk(t), illetve Uk(s) bemenő függvényt, amellyel a lineáris motor a dinamikus erő kompenzációt a lehető legtökéletesebben képes megvalósítani. A háromféle matematikai modell közül a legsokoldalúbban az állapottér modell használható.
A struktúra gráf alapján, az állapottér modell megalkotásához, a villamos részre hurokegyenletet, a mechanikai és a pneumatikus részekre pedig célszerűen csomóponti egyenleteket írunk fel, és ahogy már jeleztük, a statikus erők pneumatikus szintszabályozását nem tárgyaljuk újra, azt a szemiaktív rezgéscsillapítóval foglalkozó fejezetben már megtettük.
|
|
Emlékeztetünk arra, hogy a modellezés módszereivel foglalkozó fejezetben megmutattuk azt, hogy energia átalakítókat tartalmazó rendszerekben (kizárólag ezeknél) lehetséges a hurok és csomóponti módszer vegyes alkalmazása, ha az így kapott modell egyszerűbben kezelhető. Az elektrodinamikus váltó és a pneumatikus fordító váltó egyenletei nélkül a fenti három egyenlet nem kapcsolható össze.
|
|
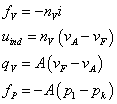
A fizikai egyenletek behelyettesítése után rendezzük az egyenleteket az állapotjelzők deriváltjára:
|
|
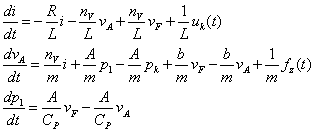
A teljesség kedvéért felírjuk az állapottér modellt mátrixos formában is, de nem ezt az alakot használjuk az átviteli függvények felírására, mert a mátrixos számítás körülményes és nem szemléletes.
Az állapottér modell mátrixos alakban:
|
| ||
|
| ||
|
|

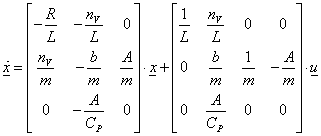
Az eredeti célunkhoz a jelfolyam gráf által kínált rajzos, és könnyen áttekinthető úton juthatunk el a legkönnyebben, ezért az állapottér modellt jelfolyam gráfon ábrázoljuk. További előny a dimenziók és előjelek ellenőrzésének egyserűsége a jelfolyam gráfon.
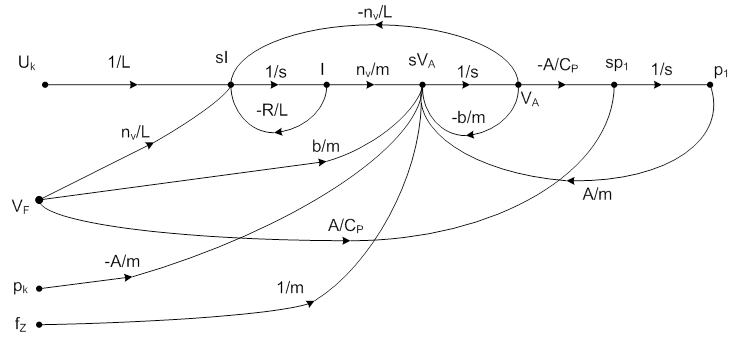
A gráfon baloldalra csoportosítottuk a gerjesztéseket. Következetesen operátor tartományban ábrázoltuk az állapottér modellt, ezért az integrátorok bemenetén az állapotjelzők „s” operátorral való szorzatát tüntettük fel. Ha lehetséges, akkor a nagybetű a változó Laplace transzformáltjára utal. A nyomás esetében pl. ezt nem lehet alkalmazni. A bemenetek közül, a dinamikus erőkompenzáció szempontjából számunkra a VF és az Uk igazán fontosak. A pk külső nyomást feltüntettük, de ennek változása valós esetben nem befolyásolja a rendszert, mert az ultraprecíziós technikában, laboratóriumi körülmények között, biztosítani kell az állandó és előírt légnyomást, páratartalmat és légnedvességet. Azokat a dinamikus gerjesztő erőket, amelyek nem a födém (padlózat) rezgése révén ébrednek az asztalon, fz jelöli, és ezek kompenzálását külön meg fogjuk vizsgálni.
A probléma megoldása szempontjából kulcsfontosságú az, hogy a jelfolyamon a VF gerjesztés (padlózat rezgés) fizikai adottságok miatt három úton hat az asztal VA sebességére, amelyet elképzelésünk szerint ideálisan zérusra szeretnénk csökkenteni. A három út az elektromechanikus (nV/L), a mechanikus (b/m) és a mechanikus-pneumatikus (A/CP). Tekintettel a kiinduláskor rögzített elvre, miszerint Vref ≠ VF, tehát a VF sebességgel kötelesek vagyunk számolni, nem marad más, mint a jelfolyam gráf segítségével és VF figyelembe vételével új utat keresni. Ennek az új útnak a meghatározása a szerző PhD disszertációjának egyik sarkalatos tézise volt.
A jelfolyam gráf mintegy „felkínálja” a megoldást. Ha VF kiküszöbölhetetlen, akkor nem tehetünk mást, mint minél pontosabban mérjük az értékét. Keresünk egy olyan átviteli tagot, amelynek bemenetére ezt a VF zavaró jelet rákapcsolva olyan Uk villamos kimenő jelet kapunk, amely a lineáris motort (megfelelő kompenzációval) működtetni képes.
Átviteli függvényekkel leírva a kompenzáció az alábbi módon valósítható meg.
Kitűzött célunk az alapjelnek megfelelően: VA=0
|
|
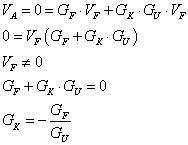
Mik ezek az átviteli függvények?
|
GF=VA/VF |
Sebesség átviteli függvény a födém és asztal között (fizikai „adottság”) | |
|
GU=VA/Uk |
A lineáris motor kapocsfeszültsége és az asztal sebessége közötti átvitel | |
|
GK=VA/Uk |
A keresett kompenzáló tag átviteli függvénye |
Ha létezik, tehát műszaki szempontból realizálható a GK átviteli tag, akkor VF precíz mérése révén el tudjuk érni, hogy az asztal a födém rezgései ellenére nyugalomban maradjon, azaz VA=0 legyen. Természetesen vF(t) méréséről van szó, de az operátor térben történő tárgyalás miatt nem „ugrálhatunk” ide-oda.
A keresett GK átviteli taggal kiegészítettük az alább látható jelfolyam gráfot. A szükséges matematikai modell meghatározásának lépései a gráf segítségével jobban követhetőek.
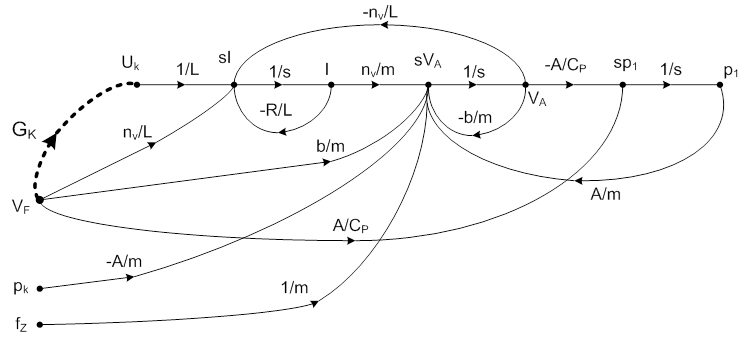
A cél tehát, hogy VA=0 legyen. VA-hoz „szerencsére” két út vezet, a természetes átvitel, azaz GF=VA/VF továbbá a kompenzációs céllal megtervezett GK-n és GU-n keresztül ugyanezen két jel között.
A gráfban két, elemben kapcsolt (összefüggő) hurok ismerhető fel, ezért az átviteli függvény nevezőjében a csak két függő hurokátviteli függvény összege szerepel, vegyes tag nincsen:
|
|
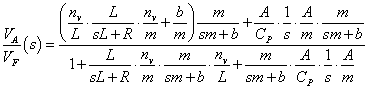
A VF természetes átvitele három rendszertípuson keresztül valósul meg. Ez három fizikai út az átviteli függvény számlálójában három átvitel összegeként jelenik meg. Érdemes, és tanulságos a jelfolyamon követni ezt.
|
|
Tudjuk az impedancia egyenérték átszámítás révén, hogy:
|
|

azaz a légrugó rugómerevsége. Behelyettesítve pneumatikus rugómerevséget, egyszerűbbé válik a dimenzió ellenőrzés:
|
|
Végül a kP egyenértékű rugómerevség kiszámításához hasonlóan a villamos ellenállás egyenértékű bR mechanikai csillapítását is meghatározhatjuk, és ezzel egyszerűbb alakú lesz az átviteli függvény, és egyszerűbb a dimenzió ellenőrzés is. Íme, tehát a sebesség átvitel a födém és az asztal között. Amint várható volt, az aluláteresztő szűrő jelleg változatlanul megmutatkozik.
|
| ||
|
|

Nézzük ezek után, hogy a lineáris motor kapcsai felől miként írható fel az átvitel. Az átvitel Uk kapocsfeszültség bemenettel azt jelenti, hogy érintésmentes a kompenzáló erő bevitele a rendszerbe elektromechanikus úton.
A két hurokátviteli függvény természetesen változatlan:
|
| ||
|
|

A dimenzió ellenőrzés a normált alak felhasználásával hajtható egyszerűen végre:
|
|
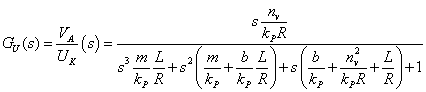
Természetes, fizikai adottság az asztal VA sebessége, ami a födém felőli VF gerjesztésre jön létre, ezt a GF(s) átviteli függvénnyel írtuk le. Ugyanakkor beiktattunk a rendszerbe egy olyan erőgenerátort, ami érintésmentesen (súrlódásmentesen) képes kompenzáló erőt bevinni a rendszerbe, ez az elektrodinamikus, lineáris, merülő tekercses motor. A motor kapocsfeszültsége felől is kaptunk VA-ra egy átviteli függvényt, ez a GU(s).
Célunk, hogy találjunk egy olyan GK(s) kompenzáló átviteli függvényt, amellyel GU(s)-t beszorozva, VF felől a két út algebrai összege zérust ad. Ebben az esetben az asztal a referenciához képest nyugalomban lesz VA=0.
Levezettük, hogy keresnünk kell egy olyan GK átviteli tagot, amelyre igaz, hogy:
|
|

Elvégezzük GK kiszámításához a két átviteli függvény osztását. Ez egyszerű művelet, mert mindkét átviteli függvény nevezője szükségszerűen azonos, így csupán a számlálókkal kell foglalkozni. (Azonos rendszer két különböző változója között írtuk fel az átviteli függvényeket, tehát a nevező, a karakterisztikus polinom nem változhat.)
|
| ||
|
|
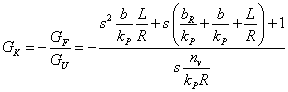

Dimenzióellenőrzést végzünk, és megállapítjuk, hogy a kapott komplex függvény dimenziója helyes, azaz GK(s)[Vs/m].
Látjuk tehát, hogy létezik olyan sorosan kapcsolt kompenzáló átviteli függvény, amely biztosítja, hogy bármilyen VF gerjesztésre a VA=0 előírás megvalósulhasson.
A keresett kompenzáló tag a gyakorlatban három párhuzamosan kapcsolt, és fázist forgató tagot jelent (negatív előjel):
|
|
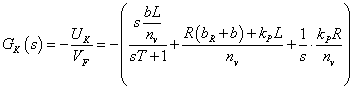
A deriváló tagot kiegészítettük az elengedhetetlen nevezővel, ahol természetesen törekszünk a T→0 feltétel teljesítésére. Ettől kezdve azonban a kompenzáló tag mind digitális algoritmussal, mind analóg kapcsolással megvalósítható. A három párhuzamosan kapcsolt tagot valós PID szabályozónak tekinthetjük.
Méréstechnikai szempontokat is figyelembe véve el kell gondolkodni azon, hogy adott feltételek között hogyan lehet a födém sebességének mérését egyszerűen, de kis hibával megoldani. Három változatot vizsgálunk meg:
Mérjük a födém abszolút sebességét, és a jel deriválását, valamint integrálását rábízzuk a GK átviteli függvény által kijelölt algoritmusra. Van olyan eszköz, amely a födém (talaj) abszolút sebességét méri alacsony frekvenciás tartományban, csak kissé robosztus, még a hordozható verziója is. (A MEMS eszközök a kérdéses alacsony frekvenciás tartományban nem mindig alkalmazhatók.) A szeizmikus abszolút sebességmérőt a földrengésvizsgálat céljaira alkalmazzák. A mérőberendezés működésének elve elektrodinamikus. Egy extrém lágy rugón felfüggesztett tekercs mozog függőlegesen a talajon (padlózaton) elhelyezett műszerházhoz képest. A műszerházban egy „edény-mágnes” van rögzítve, ennek légrésében mozog a rugalmasan felfüggesztett tekercs. Persze ahhoz, hogy a talaj sebességével mozgó mágneskör, követve a talaj mozgását, el tudjon mozdulni a felfüggesztett tekercshez képest, és így a sebességkülönbséggel arányos villamos feszültség jöjjön létre, nem csak „lágy” felfüggesztés, hanem az alacsony frekvenciás mérési tartományra való hangolás miatt nagy rezgő (lengő) tömeg (tekercs-hordozó) is szükséges. Nyilvánvaló, hogy ilyen eszközt finommechanikai konstrukciós ismeretek nélkül építeni nem lehet, mert a nagy tömeg a lágy rugót lehetetlen mértékig megnyújtaná. Ezt a problémát kiküszöbölve, a szeizmikus abszolút sebességmérőben keresztcsuklós csapágyazással, egy kar végére függesztik fel a szeizmikus tömeget, a kart pedig tengelyvonalában szabályozható rugóerővel feszítik a csapágyazás irányában a műszerházhoz.
Mérjük az abszolút gyorsulást. Erre a célra - az adott alacsony frekvenciás tartományban - különlegesen alkalmas eszköz a szeizmikus induktív gyorsulásérzékelő. A piezoelektromos gyorsulásérzékelő ebben a frekvencia tartományban nem alkalmazható. A (idő tartományban) mért aF jel egyszeres integrálásával az abszolút sebességet (vF), kétszeres integrálással pedig az abszolút elmozdulást (xF) lehet előállítani. A GK kompenzáló tag átviteli függvényének bemenete az abszolút sebesség, így csupán egyetlen integrátorra van szükség.
Abszolút elmozdulás érzékelő „direktben” a gyakorlatban nem megvalósítható, mert a födém (talaj) mikro rezgései áttevődnek a falakra is. Nincs olyan referencia (viszonyítási) pont, amely „teljesen” nyugalomban lenne. Az „abszolút” elmozdulás mérésének gondolatát el kell vetni.
Az alfejezet címében megfogalmazott feladat teljesült, tudjuk, hogy a lineáris motor kapocsfeszültségét milyen átviteli tag segítségével lehet előállítani.
Befejezésül bemutatjuk a teljes rendszer szabályozástechnikai tömbvázlatát. A „teljes” rendszer alatt az un. aktív „egylábat” értjük, azaz az asztallap nem végez kismértékű forgó mozgásokat sem.
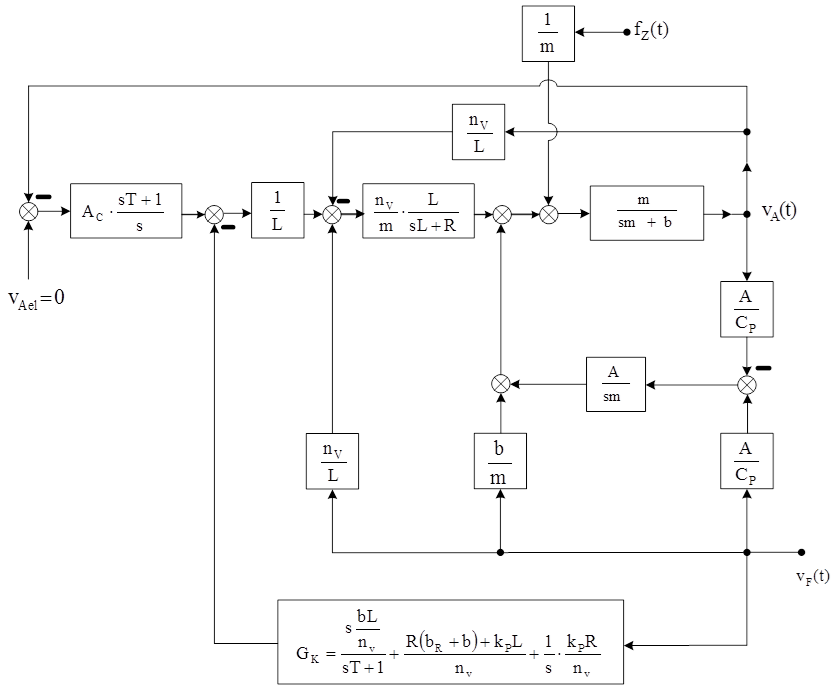
14.5. A kompenzáló hatás igazolása kísérleti modellen végzett mérésekkel
Az eddigi elméleti vizsgálatokat olyan modelleken végeztük, amelyek esetében nem vizsgáltuk a rezgéscsillapító rendszerek 3D viselkedését, úgy tekintettük, mintha a födém és az asztal kizárólag függőleges mozgásokat végezne. Ha feltételeztünk is az asztal esetében térbeli kiterjedést, a modelljeink megalkotásakor nem vettük figyelembe az asztal súlypontján átmenő x és y tengelyek körüli forgást. Bár a rezgéscsillapítók több lábon állnak, az eddigi modellek esetében az asztal minden pontja azonos sebességgel mozgott függőleges irányban.
Ez az egyszerűsítés az átviteli függvények (szemiaktív és passzív rendszerek sebesség és erő átvitelei) egyszerűbb kezelhetőségét és a kompenzáló tag meghatározását szolgálta.
A kompenzáló tag matematikai modelljének meghatározása után bemutatunk néhány kísérleti eredményt, amelyek laboratóriumi körülmények között születtek, és amelyek során ugyancsak kizárólag a függőleges mozgásokat vizsgáltuk, forgás nélkül.
Annak érdekében, hogy a jelenségek méréstechnikai feldolgozása egyszerűbb legyen, építettünk egy olyan rázóasztalt, amely a födém függőleges mozgását volt képes felnagyítva utánozni, 0.01…30 Hz tartományban, diszkrét szinusz sebesség gerjesztések formájában. A födémet reprezentáló síklapon állítottuk fel az aktív rezgéscsillapítót, amely már nem modell, hanem egy olyan rendszer, amelyet kisebb mikroszkópok rezgéscsillapítására szokás alkalmazni. Az asztal három, szabályozott pneumatikus lábon állt, síkja vízszintes volt, és az asztal lapja alatt, annak súlyvonalában rögzítettük az asztalhoz a lineáris motor tekercsét. A motor állandó mágnes-köre a födém-modellhez volt rögzítve, a légrésben a tekercs nem súrlódott. A kompenzáló tagot egy elektronikus kapcsolóval a szabályozókörtől le lehetett választani, illetve visszakapcsolni. A födém és az asztal sebességét integrálással állítottuk elő, egy-egy induktív gyorsulásérzékelő jeleit felhasználva. Ellenőrzésképpen a födém-imitáción elhelyeztünk egy hordozható szeizmikus sebességmérőt is. Az integrálással nyert sebesség jelek és a direktben mért sebesség egyezősége megfelelő volt.
A levezetéseink eredményeit igazolták azok a mérések, amelyek a kompenzáló tag bekapcsolása nélkül születtek, és amelyek közül négy jellegzetes példa a (14.21. ábra) ábrán látható.
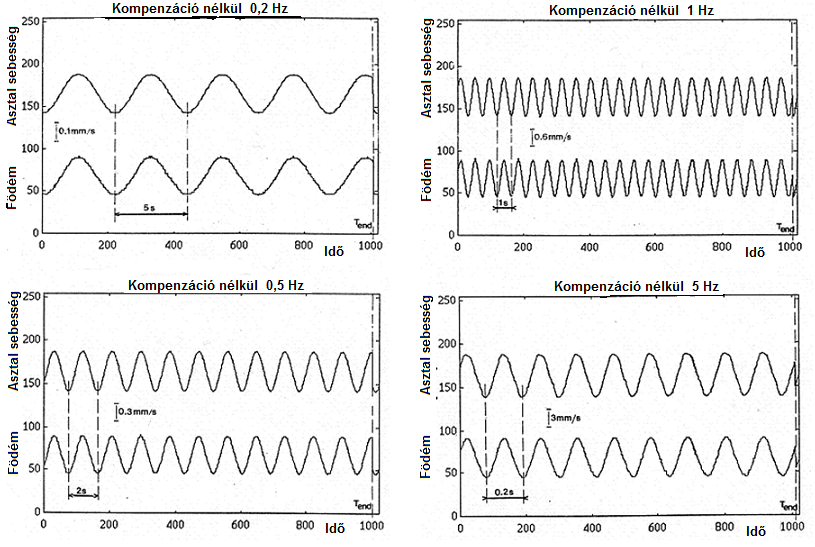
Látjuk a (14.21. ábra) ábrán, hogy a födém és az asztal sebessége, a kompenzációs tag működtetése nélkül, a négy kiválasztott alacsony frekvencián azonos. A szemiaktív pneumatikus rezgéscsillapító rendszer szelepei a födém kis rezgés amplitúdóinak hatására nem nyitnak, a rendszer passzív rezgéscsillapítóként, aluláteresztő szűrőként működik, pontosan úgy, ahogy a fejezetben bemutatott négy gyártmány adatlapjain látható frekvenciamenet mutatja.
A (14.22. ábra) ábrán folyamatában mutatjuk be azt, hogy mit eredményez 0.2 Hz-es födémgerjesztésnél, ha Tbe időpillanatban bekapcsoljuk a kompenzáló tagot. Az asztal födémet követő harmonikus mozgása csaknem teljesen megszűnik, és amit látunk, az tulajdonképpen egy 40 dB-lel kisebb sebesség amplitúdó, némi fázistolással. Azt, hogy az asztal mozgása teljes mértékben megálljon, az adott kísérleti berendezés, a kompenzáló tag függvényének közelítő jellege, a gyorsulás jelek integrálása és a mérési zajok miatt nem várhatjuk. Ugyanakkor kétséget kizáróan igazolást nyert, hogy a kidolgozott kompenzáció elve működik.
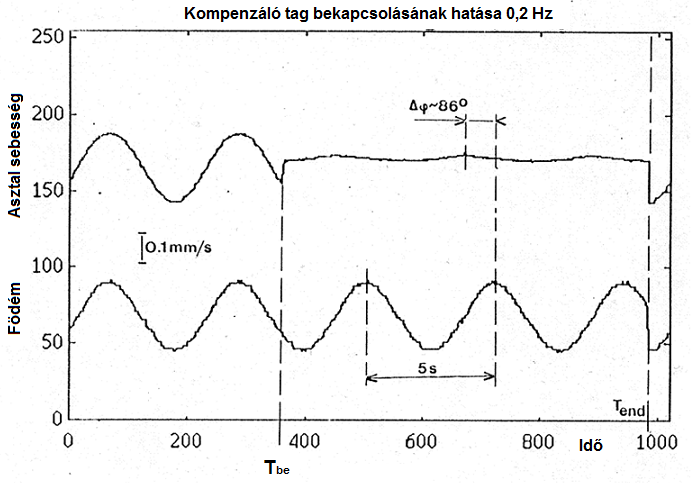
A bekapcsolási folyamat mellett, a (14.23. ábra) ábrán az aktív rezgéscsillapító működése látható, két jellegzetesen alacsony frekvencián, amelyek az épületrezgésekre jellemzőek. A kompenzáló hatás mérésekkel egyértelműen beigazolódott.
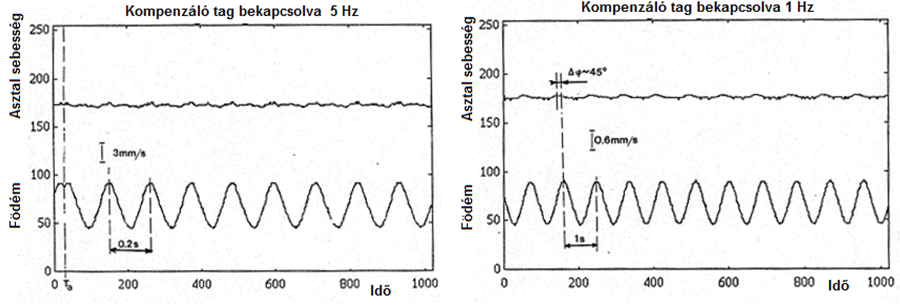
A modellkísérletek után, amelyeket kisebb méretű berendezésen végeztünk, érdemes kiterjeszteni a vizsgálódást nagyobb szerkezetekre, amelyek esetében már nem feltételezhető, hogy az asztal minden pontjának függőleges sebessége azonos, és az sem, hogy az asztal lábazatok alatti födém is azonos frekvenciával és fázisban rezeg.
14.6. Aktív rezgéscsillapító 3D modellje és szabályozása
Lássuk tehát, miben változik a modell, ha a védendő objektum (asztal) térbeli kiterjedései – főként az x-y síkban - nagyobbak. Az aktív rezgéscsillapító négy lábazaton áll, amelyek a statikus erőkompenzációt pneumatikus értéktartó szabályozókörrel biztosítják. A négy láb közül három szabályozott, a negyedik csak a kívánt szint beállítására szolgál. Ugyanakkor minden láb mellett találunk egy-egy lineáris motort, amelyek a födém felől érkező sebesség gerjesztések hatásának kompenzálását szolgálják. A rendszer matematikai modelljének megalkotásához szükség van a következő ábrán látható vázlatra. A vázlaton csupán a modellhez szükséges mozgásokat és a változók közötti kapcsolatokat tüntettük fel. A lábazatok belső felépítése pontosan megegyezik a 14.2. szakasz fejezetben látható egy-és kétkamrás pneumatikus lábakéval, ezért azok nem szerepelnek a vázlaton.
Az ilyen jellegű rezgéscsillapító asztalok forgása a „z” tengely körül nem lehetséges, ha a gördülő membránok szakszerűen vannak szerelve. Az „x” és „y” tengelyek körüli, kismértékű forgás teljesen normális, hiszen egy ilyen asztal méretei 2m x 1.5m-nél kezdődnek. Anyaguk gránit, vagy gyakrabban könnyűszerkezetes konstrukció, amelynek alsó és felső lapjai között függőleges elrendezésű méhsejt-merevítés található.
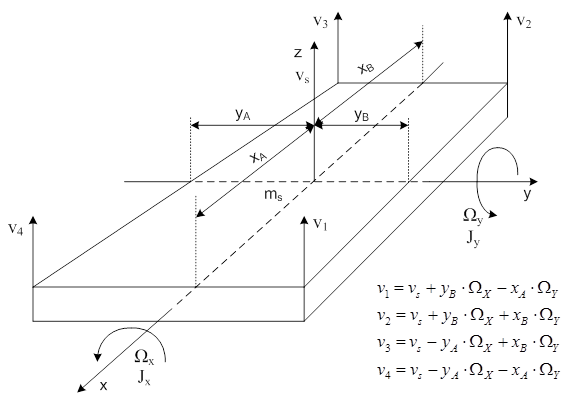
Amint a vázlaton látható, feltételeztük, hogy a födém a négy lábazat alatt nem azonos amplitúdóval és frekvenciával rezeg, ugyanakkor az asztallap sarkainak sebessége a merev mechanikai rendszer miatt természetesen meghatározott. Az asztal sarkok sebességei, amelyek nem állapotjelzők, hanem kiadódó értékek, a vázlat jobb alsó részén láthatóak. A merev asztallap súlypontjának vs függőleges sebessége és a súlyponton átmenő „x” és „y” tengely körüli forgások szögsebességei lesznek az állapotjelzők.
A csupán függőleges mozgást végző rezgéscsillapító gráfjának felhasználásával megszerkeszthető az a struktúra gráf, amelyik már a lehetséges térbeli mozgások figyelembevételére is alkalmas. Ezt a gráfot látjuk a következő ábrán. A részletek ismétlődése miatt választottuk ezt a térbeli elrendezést. A három szemiaktív és egy passzív pneumatikus láb a négy sarokban, középen a tömeg mozgása, alatta és felette a tengelyek körüli forgás miatti tehetetlenségi nyomatékok.
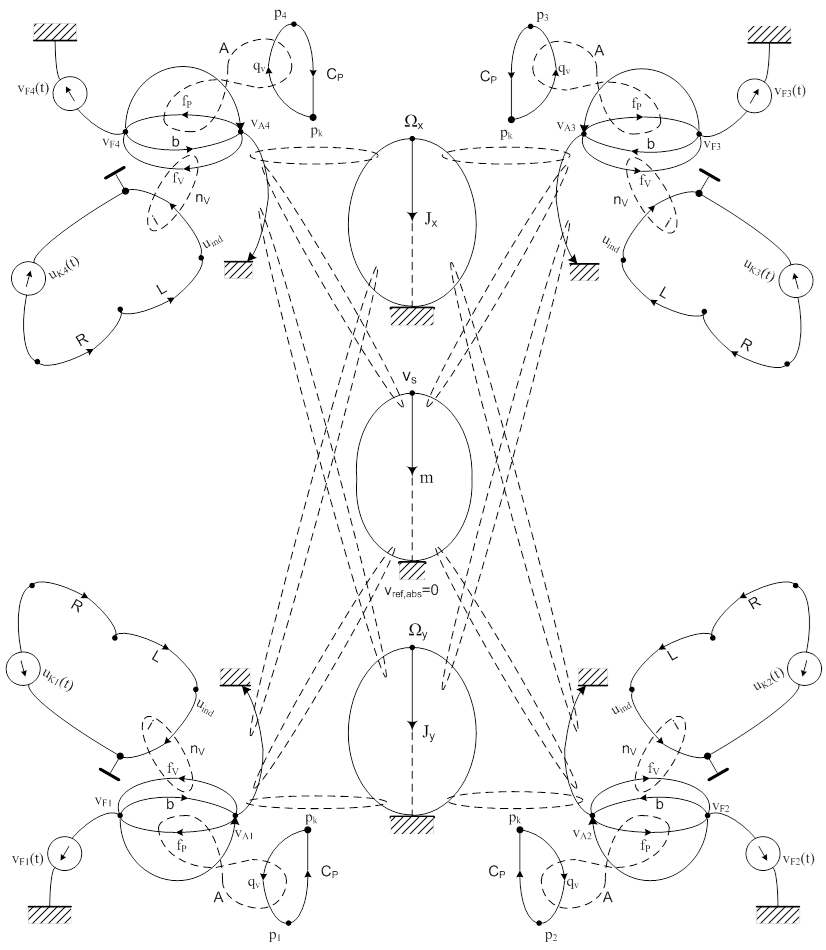
Az áttekinthetőség kedvéért a mechanikai váltók és transzformátorok (egyenes és forgó mozgások közötti kapcsolatok) állandóit nem rajzoltuk a gráfba. A kapcsolódást jelentő egyenletek egy csoportját (keresztváltozók közötti kapcsolatok) a 3D vázlat alsó részén láthatjuk. Ugyancsak nem tüntettük fel a négy kompenzáló tagot és a szabályozás többi elemét sem, a gráf csak a szakasz matematikai modelljének felírására szolgál.
A matematikai modell csak állapottér lehet, mert a paraméterek és állapotjelzők nagy száma miatt más modell kezelhetetlen lenne. Állapottér mellet szól az is, hogy a továbbiakban szimulációk segítségével kívánjuk bemutatni azt az összetett mozgást, amelyet az aktív rezgéscsillapítású asztal a térben végez.
Mielőtt felírnánk az állapotegyenleteket, definiálnunk kell az állapotjelzőket. A súlypont sebességét, a két tengely körüli szögsebességeket már említettük. További állapotjelzők a négy lineáris motor tekercs árama, és az egykamrás légrugós lábakban uralkodó belső nyomás. A vizsgálatot ebben a jegyzetben kétkamrás lábazatokra kiterjeszteni terjedelmi korlátok miatt lehetetlen.
A 11 állapotjelző tehát a következő:
|
|

A terjedelmi korlátok miatt, az eddigiektől eltérő módon nem írjuk fel a gráf alapján a hurok és csomóponti egyenleteket, csak a számítások eredményét adjuk meg. Ezek az  rendszermátrixból és az átalakítók egyenleteinek alkalmazásával rekonstruálhatóak.
rendszermátrixból és az átalakítók egyenleteinek alkalmazásával rekonstruálhatóak.
Az  rendszermátrix elemeinél látható, hogy feltételeztük a következőket:
rendszermátrix elemeinél látható, hogy feltételeztük a következőket:
Mind a négy láb CP pneumatikus kapacitása azonos, azonosak a lineáris motorok nV állandói és R, L paraméterei.
A 3D vázlaton láthatók az asztalra vonatkozó xA, xB, yA, és yB távolságok, illetve kararányok.
|
|
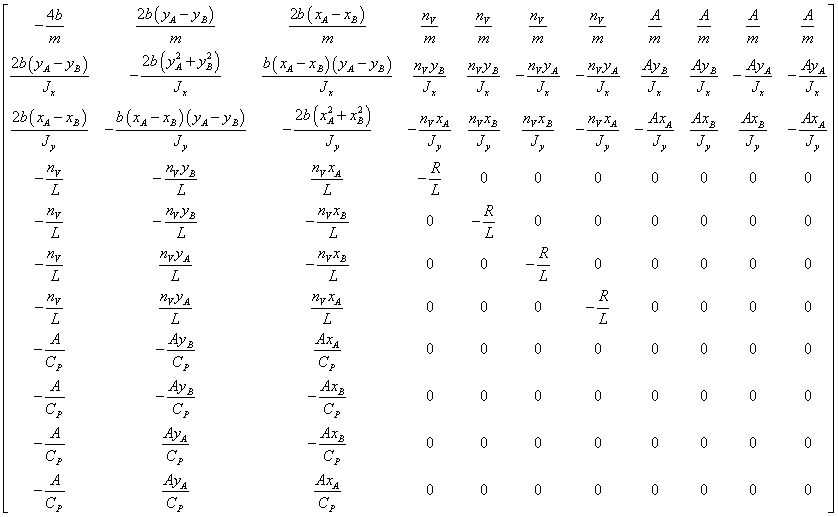
A  bemeneti és
bemeneti és  kimeneti mátrixokat nem mutatjuk be, a méretek hasonlóak, bár az oszlopok száma kevesebb. Bárki számára belátható az
kimeneti mátrixokat nem mutatjuk be, a méretek hasonlóak, bár az oszlopok száma kevesebb. Bárki számára belátható az  rendszermátrix szemlélése alapján, hogy ilyen rendszám mellett a „kézi” megoldás reménytelen vállalkozás, de egyben értelmetlen is.
rendszermátrix szemlélése alapján, hogy ilyen rendszám mellett a „kézi” megoldás reménytelen vállalkozás, de egyben értelmetlen is.
Pontosan azért mutatjuk az olvasónak ezt az összetett mechatronikai rendszert, hogy érzékeltessük a digitális számítógépes szimulációban rejlő nagy lehetőségeket.
A következő ábrákon a szimulációs eredményeket láthatjuk. Tekintettel arra, hogy az ábraszövegek idegen nyelvűek, az alábbi magyarázatot adjuk:
|
PLOT 1…8 |
Görbék sorszáma | |
|
ECKE 1…8 |
Asztallap sarkainak sebessége, a 3D vázlat sorrendjének megfelelően | |
|
FUBOD 1…8 |
A födém lábazatok alatti sebessége |
A szimulációkat SI mértékegységekkel végeztük és az eredményeit természetesen SI mértékegységben (m/s) mutatjuk be.
A szimulációs eredmények bemutatása előtt természetesen leszögezzük, hogy a szimulációk során nem csak harmonikus gerjesztésekkel dolgoztunk, hanem nagy súlyt fektettünk a különböző sávszélességű, alacsony frekvenciás zajok hatásának vizsgálatára is. Ezek eredményeit terjedelmi korlátok miatt nem áll módunkban közölni.
Az első ábrán azt a szimuláltuk, hogy a négy lábazat közül három alatt a födém nyugalomban van, a negyedik alatt a födém sebességének amplitúdója kb. 2.5·10-2 m/s és a szinuszos rezgés frekvenciája 2 Hz. Az ábrafelirat szerint a kompenzáló tagok nincsenek bekapcsolva (ohne Rechnerglied: számító-kompenzáló tag nélkül) és látjuk, hogy az asztallap négy sarka nagyjából ugyanakkora sebesség amplitúdóval mozog, mint a födém. A görbék sejtetik, hogy igen bonyolult térbeli mozgásról van szó.
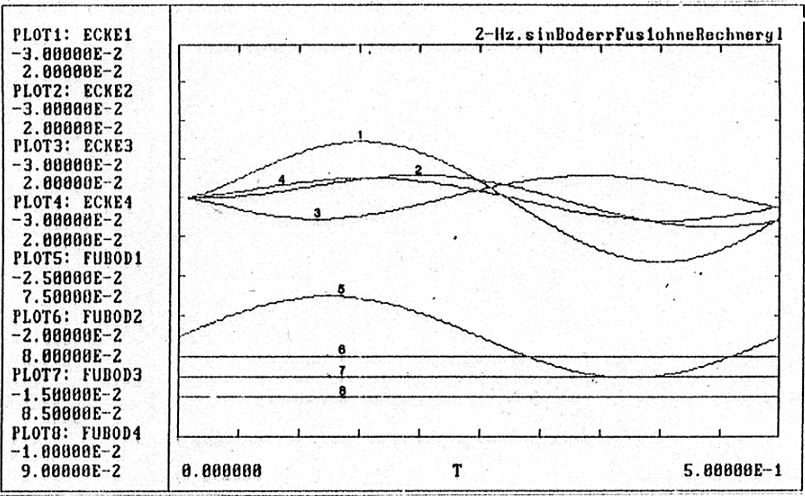
Nézzük, mit eredményez a szimuláció, ha a szabályozás mellett bekapcsoljuk a kompenzáló tagokat is.
Ezekből a szimulációs eredményekből mutatunk be egyet.
A szimulációban alkalmazott födémgerjesztések célzottan eltérő frekvenciájúak minden láb alatt azért, hogy a szimulációban rejlő lehetőségeket vizsgálhassuk. A korábbi amplitúdóval, de ezúttal minden láb alatt más-más szinuszos frekvencián (0.5, 1, 2, és 4 Hz) gerjesztjük az aktív rezgéscsillapítót. És bár az 1…4 görbéken az asztal sarkainak szeszélyes mozgásait látjuk, a kompenzáció hatása tökéletes, mert az is látható, hogy 4 nagyságrend különbség van a födém sebességek amplitúdói (10-2 m/s=10 mm/s) és az asztal sarkok sebesség amplitúdói (3…5 μm/s !!!) között.
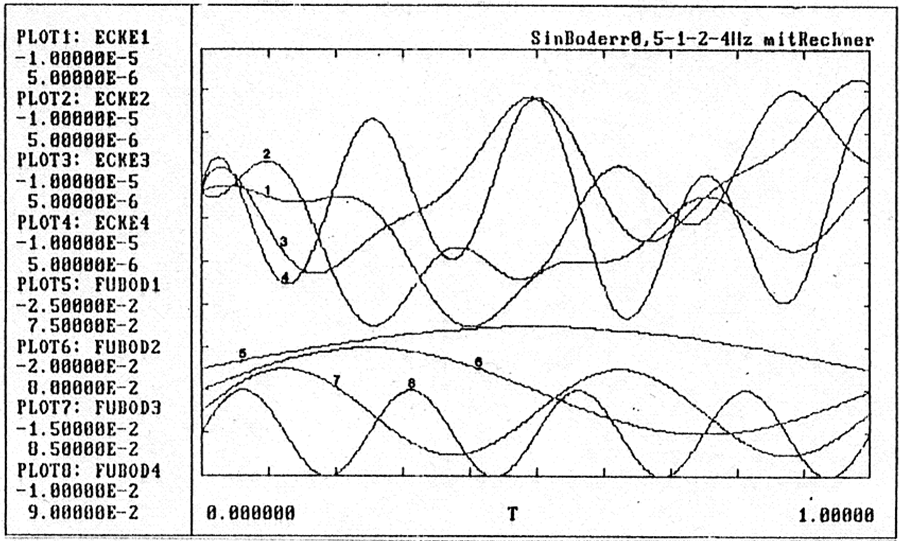
A mechatronikai aktív rezgéscsillapító hosszúra nyúlt tárgyalását befejezzük azzal a meggyőződéssel, hogy ez a fejezet jó összefoglaló példája a módszeres mechatronikai tervezésnek.
Íme, az aktív rezgéscsillapító, mint a mechatronika komplex rendszereinek egyik jellegzetes példája áll előttünk. A mechatronika definíciója akár ennek a példának a tanulmányozása után is megszülethetett volna. A definíció sarkalatos pontja ugyanis kimondja, hogy a mechatronikai az a berendezés, amelyben az elektronika/elektrotechnika, a gépészet és az informatika „szinergikus” egymásra hatása megnyilvánul. A hangsúly a szinergián van, amely kifejezés „egymást segítő”, „egymást kiegészítő” kifejezésekkel adható vissza magyar nyelven. A mechatronikai aktív rezgéscsillapítású asztal magasságának beállítása fém, vagy polimer rugóval nem megoldható. Meg kell jelenjen a szabályozható pneumatikus rendszer, a légrugó, hiszen szükség van a nagy statikus terhelések, erők szabályozható kompenzálására. Persze tudjuk, hogy a pneumatika is a gépészet szakterületéhez tartozik, de azért ez a terület mégsem a klasszikus műszaki mechanika világa. Ezt a statikus feladatot elektromechanikusan megoldani értelmetlen vállalkozás volna, hiszen esetenként 400…1000 kg tömeg elektrosztatikus, vagy elektrodinamikus „lebegtetetéséhez” aránytalanul nagy villamos energiára lenne szükség. Az áram által okozott hőterhelés azután éppen annak az ultraprecízós feladatnak a megoldását tenné lehetetlenné, amelynek a rezgésvédelmére az egész rendszert létrehoztuk. A födémrezgések okozta dinamikus erők, hiszen itt alacsony frekvenciákról és kis amplitúdójú sebességekről van szó, már könnyebben kompenzálhatók elektrodinamikus úton. A villamos megoldás azért is „kellemes”, mert a lineáris motor kapcsainak egyike sem kötött a mechanikai referenciához. Villamos oldalról a „beavatkozás” érintésmentes lehet, ha megfelelő aktuátort találunk. Informatika és szabályozástechnika nélkül a lineáris motor kapcsaira nem tudnánk eljuttatni azt a villamos jelet, amely a dinamikus erők megfelelő fázisban történő kompenzálását biztosítja.
A mai időkben, a műszaki életben, a hagyományokhoz való olyan típusú ragaszkodás, amely azt eredményezi, hogy szakemberek egy terület „felsőbbrendűségét”, vagy kizárólagosságát hirdetik, nem csak idejét múlt hozzáállás, hanem egyenesen veszélyezteti a tudományos haladást.
Az „egykerekezés”, mint cirkuszi mutatvány évszázadok óta ismert. Az instabil mechanikai rendszert a nyeregben ülő, gyakorlott ember „szenzorai” (belső fülhöz tartozó körkörös ívjárat), szabályozó rendszere (központi idegrendszere) és „aktuátorai” (izmai) stabilizálják. A mechatronikai segway attól mechatronikai, hogy az érzékelés, szabályozás és beavatkozás feladatát az elektromechanika és az elektronika vette át. Az alap rendszer ettől még egy instabil mechanikai (gépészeti) rendszer marad. A mechatronika a nemzetközi tapasztalatok szerint csak olyan szakemberek által művelhető hatékonyan, akik tisztában vannak azzal, hogy a mechatronikai rendszerek alapvetően gépészeti rendszerek. Az első mechatronikai szakkönyveket is végzett, elsődlegesen gépész, vagy villamosmérnökök számára írták [1.1.]. A mechatronikai mérnökök olyan szakemberek, akik birtokában vannak a műszaki mechanika, a gépszerkezettan, a konstrukció, a CAD, a végeselemes modellezés és az anyagtudomány nélkülözhetetlen ismereteinek, de „közös” nyelvet képesek beszélni a villamosmérnökökkel és az informatikusokkal, feladatokat tudnak megfogalmazni és az eredményt szakszerűen ellenőrizni. Képesek esetenként maguk is egyszerűbb villamos, vagy informatikai problémák megoldására.
Szakirodalom
[14.1.] Mechatronischer Schwingungsisolator für die Ultrapräzisionstechnik Dissertation. Technische Universität Ilmenau. 1994.
[14.2.] Shock and Vibration Handbook. McGraw-Hill. 1976.
[14.3.] Harris’Shock and Vibration Handbook. McGraw-Hill Handbooks. 2009.
[14.4.] Szabályozások dinamikája. Akadémiai Kiadó. Budapest . 1974.
15. fejezet - CD-fej fókusztávolság szabályozásának tervezése és szimulációja
A CD-fej (optikai egység, angolul Optical Pick Up, röviden OPU) igazi mechatronikai szerkezetnek tekinthető, mechanikai, villamos és optikai részegységek együttese beépített szabályozóval. A CD fej speciális kialakítású rugós vezeték rendszere a hengerlencse több irányú mozgatását teszi lehetővé a hozzá csatlakoztatott lineáris merülő tekercses motorok segítségével. Ebben a fejezetben a hengerlencse és a CD lemez közötti – precízen tartandó – fókusztávolságot mint szabályozott jellemzőt fogjuk vizsgálni.
Először összefoglaljuk röviden a fókuszáló rendszer, mint szakasz 6.4. szakasz fejezetben bemutatott dinamikus modelljét, majd ezt követően helyzetszabályozást tervezünk a megkövetelt pontosságú beállításhoz.
A CD lemez 120 mm átmérőjű, 1,2 mm vastag, fröccs-sajtolással előállított műanyag (polikarbonát, PVS vagy akril) alapú korong. Az átmérőre megengedett eltérés legfeljebb 0,5 mm, vastagságban legfeljebb 0,01 mm. Az excentricitás megengedett legnagyobb értéke 50 µm.
Az adatok belülről induló spirálon tárolódnak, a spirál két szomszédos (azonos sugárra eső) szakasza egymástól 1,6 μm távolságra esik. A bináris 0 és 1 értékeknek a bevonatrétegben kiemelkedések (bordák) és mélyedések (angol elnevezéssel pit) felelnek meg. Az információt hordozó pitek hosszúsága eltérő.
A lemez lejátszásakor a spirális sávra fókuszált lézersugár a lemez hátoldalán lévő rétegről verődik vissza. A bordákról sokkal több fény verődik vissza, mint a mélyedésekből. (A pitek kialakítása olyan, hogy az aljukról és tetejükről visszaverődő nyalábok egymást kioltó interferenciája miatt gyakorlatilag nincs visszaverődés.)
A CD lemezeknél az adatokat tartalmazó szektorok fizikai hosszúsága állandó. A lemez forgási sebessége éppen ezért nem állandó, különben a spirál olvasófejhez viszonyított sebessége a sugár mentén eltérő lenne. A fej és a lemez egymáshoz viszonyított állandó sebességét, az állandó lineáris sebességet (CLV, Constant Linear Velocity) úgy biztosítják, hogy változtatják a forgási sebességet annak függvényében, hogy a lemez melyik részét kell éppen olvasni. A spirális sáv minden pontján állandó letapogatási sebességet biztosító fordulatszám-szabályozást szokták állandó kerületi sebességű szabályozásnak is nevezni.
A letapogató rendszer mozgatását lineáris motorral biztosítják. A lézerdiódát a kibocsátott fényt irányító, polarizáló, tükröző, felfogó elemekkel együtt egy egységbe, az optikai fejbe szerelik. Ennek része a fókuszálást biztosító lencsét mozgató két-tengelyű (optikai tengely irányú és sávra merőleges) elem, amelynek egyik tengely menti elmozdulása a fókuszt szabályozza, a másik a pit-sávon való haladást biztosítja.
A lemez deformációja (vetemedése) miatt bekövetkező fókusztávolság változás dinamikus után-állítása és az excentricitásból származó sávkövetési hibák elhárítása elengedhetetlen a pontos olvasáshoz.
A fej mindkét tengelye mentén szükséges a szabályozás. A lencsét mozgató rendszerben lévő négy csuklós mechanizmus mozgását (Lorentz-erő segítségével) lineáris motor biztosítja. A homogén mágneses mezőt két mágnes hozza létre. A fejben lévő két egymásra merőleges tekercs vége a mágneses mezőben van. A tekercsen átfolyó áram hatására a Lorentz-törvény értelmében erő hat a tekercsekre és így a fejre. A csuklók lehetővé teszik a mozgást, miközben megőrzik a síkok párhuzamosságát.
15.1. Matematikai modell előállítása
A CD-fej egyszerűsített modelljében a villamos részt egy soros RL-körrel adhatjuk meg, a mechanikai rész pedig egy tömeg-rugó-csillapítás rendszer. A villamos és mechanikai rendszer kapcsolatát a lineáris motor, mint elektromechanikai energiaátalakító (váltó) biztosítja.
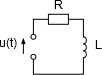
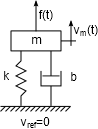
Az összekapcsolt rendszer modelljét struktúragráffal szemléltethetjük.
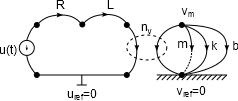
A váltó típusú energiaátalakító egyenletei:
|
|
(15.1) | |
|
|
(15.2) |


ahol f [N] az erő, i [A] a villamos áram, v [m/s] a sebesség, u [V] a feszültség és nv [N/A=Vs/m] az energiaátalakító állandója.
A villamos rész egyenleteit a hurokmódszerrel írjuk fel
|
|
(15.3) |

A megfelelő feszültségeket a fizikai összefüggésekből kifejezve és az u(t) gerjesztést az egyenlet jobb oldalára rendezve
|
|
(15.4) |
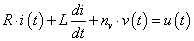
A kapott egyenletet Laplace-transzformáljuk (zérus kezdeti érték feltételezésével).
|
|
(15.5) |

A mechanikai rész egyenletét csomóponti módszerrel írjuk fel
|
|
(15.6) |

A megfelelő erőket a fizikai összefüggésekből fejezzük ki (a tömeg vm sebességét v-vel jelölve a továbbiakban)
|
|
(15.7) |

A kapott egyenletet Laplace-transzformáljuk (zérus kezdeti érték feltételezésével).
|
|
(15.8) |

Az i áramot és a v sebességet választva állapotváltozóknak a rendszer mátrixos alakú állapotegyenlete
|
|
(15.9) |
A sebesség Laplace-transzformáltját, mint a feszültség Laplace-transzformáltjnak függvényét a fenti egyenletrendszerből fejezhetjük ki
|
|
(15.10) |
Először a törtet tüntetjük el a nevezőből, majd felbontjuk a zárójelet
|
|
(15.11) |
Az időállandós alakhoz átrendezve
|
|
(15.12) |

A G(s) átviteli függvény definíció szerint a kimenő jel Laplace-transzformáltjának és a bemenő jel Laplace-transzformáltjának hányadosa. Esetünkben a bemenő jel az U(s) feszültség, a kimenő jel a CD-fej függőleges elmozdulása, jele X(s)
|
|
(15.13) |

Mivel kimenetként a V(s) sebesség áll rendelkezésünkre, alkalmaznunk kell a sebesség és elmozdulás közötti (időtartományban deriválással adott) összefüggést.
|
|
(15.14) |
A feszültség és elmozdulás közötti átviteli függvény így
|
|
(15.15) |
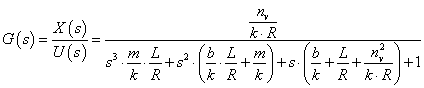
Általános alakba átírva arányos harmadrendű rendszert azonosíthatunk
|
|
(15.16) |

A rendszer valóban harmadrendű, hiszen három független energiatárolója van:
a villamos oldalon az L [H] induktivitás
a mechanikai oldalon az m [kg] tömeg és a k [Ns/m] rugó
Részben saját mérések alapján, részben katalógusból választott adatokkal pontosan számíthatjuk az átviteli függvény együtthatóit.
|
Elektromechanikai energiaátalakító (váltó) |
nv = 0,0515 Vs/m |
|
Induktivitás |
L = 0,00039 Vs/A |
|
A CD-fej tömege |
m = 1,82 g |
|
Rugómerevség |
k = 25,7 N/m |
|
Csillapítási tényező |
b = 0,032 Ns/m |
|
Ellenállás |
R = 7 Ω |
15.2. A szakasz szimulációs modellje
A National Instruments cég LabVIEW (Laboratory Virtual Instrumentation Engineering Workbench) szoftvercsomagja (http://www.ni.com/labview/) 2009-es verziójában, a Control Design and Simulation Module (http://www.ni.com/labview/cd-sim/) elemkészletével készült az átviteli függvény szoftveres leképezése. A LabVIEW és a kiegészítő használatában a [15.1.], [15.2.], [15.3.] hivatalos források mellett szintén találhatunk interneten hozzáférhető segédanyagokat és mintapéldákat.
A paraméteres átviteli függvény a VI előlapján (Front Panel) a Controls/Control Design & Simulation/Control Design/Create Model paletta útvonalon elérhető Symbolic TF blokkal készült. Az alábbi ábra bal oldalán látható a program által létrehozott elemkészlet, a sárga nyíltól jobbra eső „CD-fej átviteli függvény” kijelző (Indicator) a programozási felületen (blokkdiagramon, Block Diagram) elkészült keret kimenetén a „Resulting Model is Here. Wire from this control to your analysis VI.” címkéjű kiemeneten Create Indicator paranccsal létrehozott gyári átviteli függvény (transfer function, TF) modellstruktúra.
A szimbolikus megadású átviteli függvény bemenet (Control) elemei:
Model Name (string): ide írhatjuk a modell nevét, esetünkben ez CD-fej
Sampling Time (s): mintavételes rendszernél itt lehet beállítani a másodpercben mért mintavételi időt. Példánkban folytonos rendszerrel dolgozunk, ezért marad az eredetileg felkínált 0 s mintavételi idő beállítás.
Polynomial order: a kiválasztott Descending (Mathscript) állapotban az átviteli függvény számláló és nevező polinomjában szereplő együtthatókat az s Laplace-operátor csökkenő hatványai szerint rendezzük, ahogy a levezetett matematikai modellben. A számításokban a másik lehetőségnek – Ascending (LabVIEW) – megfelelően, vagyis s emelkedő hatványai szerint rendezett együtthatókat találunk. Utóbbi alakban jelenik meg a „CD-fej átviteli függvény” nevű TF típusú modell a kép jobb oldalán.
Numerator: a számláló polinom együtthatóit adhatjuk meg paraméteres alakban ebben a Table Control (szöveges táblázat, vagyis string típusú elemek két dimenziós tömbje) adattípusú elemben. Egyetlen, b0-lal jelölt konstanst kell megadnunk, a levezetett matematikai modellben szereplő változónevekkel. A táblázat első sorában szerepelnek a b0, b1, b2, … általános paraméter nevek, számozásuk megegyezik a megfelelő s hatvány kitevőjével (a Descending értékűnek választott Polynomial Order miatt).
Denominator: a nevező polinom megadására szolgáló, előzőhöz hasonló felépítésű elem. A harmadrendű rendszer nevezőjében a0, a1, a2 és a3 általános paramétert adunk meg, a levezetett átviteli függvényben szereplő formulákkal.
Symbolic Variables: ez a beépített típusdefiníció (TypeDef) egy dimenziós tömbbe rendezve tartalmazza a tetszőleges sorrendben megadott, a számlálóban és nevezőben használt változókat. A változó neve (Name) string típusú, értéke (Value) double típusú (64 biten ábrázolt, 15 jegyes pontosságú) valós szám. A Name-Value párok cluster adattípusba vannak összefogva. A változó-érték párok sorrendje tetszőleges.
Resulting Model: kép (picture) típusú kijelző, a VI futtatása után itt jelenik meg a matematikai modell, jelen esetben a változók behelyettesítésével meghatározott numerikus átviteli függvény „szépírással” (azaz a kézíráshoz hasonló tört formában).
A számításokhoz használt átviteli függvény adattípusú elem az említett „CD-fej átviteli függvény” kijelzőn látható. Az adattípus két (további változókat tartalmazó) elemből álló cluster. A „properties” tartalmazza a kijelzőn látható „Model Name” és „Sampling Time” változók értékét. A „transfer function(s)” akár több bemenetű-több kimenetű (Multiple Input, Multiple Output, MIMO) lineáris rendszerek átviteli függvényeinek számláló és nevező polinom együtthatóit is tartalmazhatja. Egy átviteli függvény egy clustert foglal el, ahol a Numerator és Denominator double típusú számokból álló vektorok a számláló és a nevező polinom együtthatóit tartalmazzák, növekvő s hatványok szerint (azaz Ascending (LabVIEW) beállításnak megfelelően, szemben a szimbolikus megadásnál választott Descending (Mathscript) csökkenő hatvány szerint rendezett együtthatókkal).
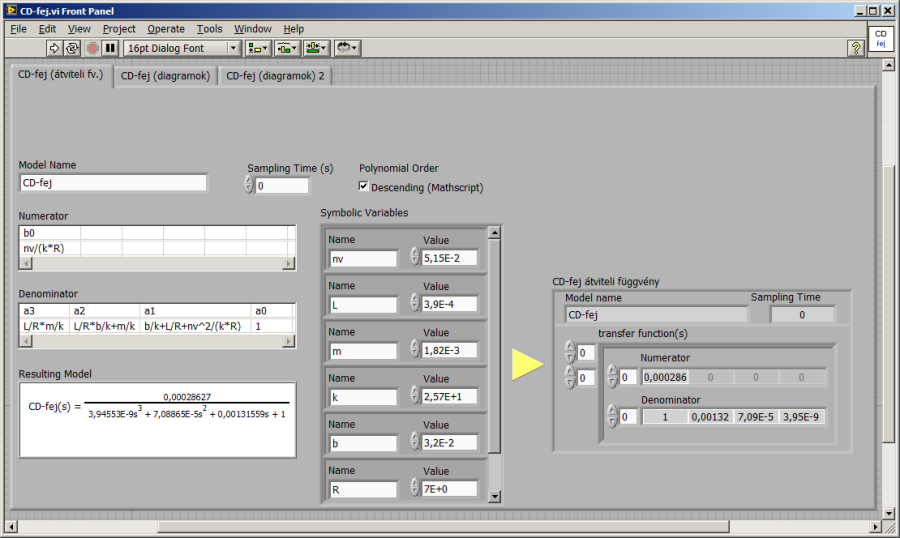
A következő ábra bal oldalán látható keretet (Sequence struktúrát) az előlapi, Controls/Control Design & Simulation/Control Design/Create Model paletta útvonalon elérhető Symbolic TF blokk választása hozta létre, megkímélve a felhasználót a számításokban használt formátumú átviteli függvény adattípus „saját erejű” előállításától (vagyis a szükséges LabVIEW programrészlet „megírásától”).
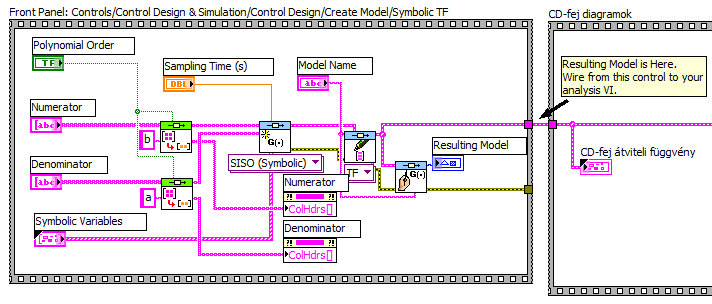
Az alábbiakban látható – „CD-fej diagramok” címkéjű, szintén Sequence struktúrába foglalt – programrészlet az átviteli függvénnyel adott rendszer jellegzetes idő- és frekvenciatartománybeli diagramjait és az átviteli függvény gyökeloszlását ábrázolja. A VI-ok a Control Design & Simulation/Control Design paletta útvonalon érhetők el, az alpaletták neve és az illető VI neve az alábbiakban szerepel, az ábrának megfelelően a blokkokat balról, majd fentről lefelé sorolva:
Dynamic Characteristics/CD Damping Ratio and Natural Frequency.vi: a pólusok jellemzőit számszerűen megadó blokk, kimenetei (egydimenziós double elemű tömb formában) a csillapítási tényezők (Damping Ratios) és sajátfrekvenciák (Natural Frequencies), valamint a pólusok (Poles) egydimenziós komplex (complex double, CDB) tömbként
Time Response/CD Step Response.vi: átmeneti függvény
Frequency Response/CD Bode.vi: Bode-diagrampár (amplitúdó és fázis)
Frequency Response/CD Nyquist.vi: Nyqusit-diagram (helygörbe), alapértelmezés szerint a (-∞,∞) (kör)frekvenciatartományban, ezt bírálja felül a bekötött „Frequency Range” cluster konstansban 0-ra átírt „Initial frequency” változó, így a [0, ∞) körfrekvencia (rad/s) tartományban rajzolunk (az alapértelmezett frekvenciát a -1 jelzi)
Dynamic Characteristics/CD Pole-Zero Map.vi: pólus-zérus eloszlás a komplex számsíkon
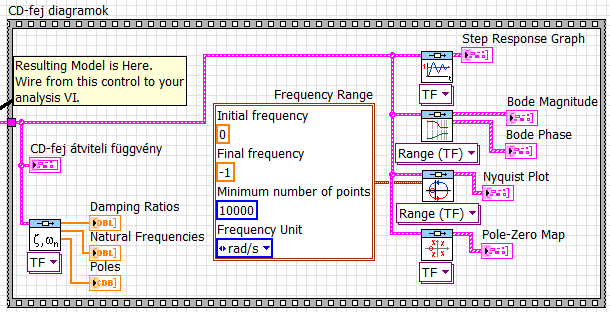
Az előlapi grafikus kijelzőket legegyszerűbben a fent felsorolt négy rajzoló VI megfelelő kimenetére jobb egérgombbal kattintva a „Create Indicator” menüvel készíthetjük el. Az egyes grafikus kijelzőket természetesen igény szerint módosíthatjuk, a példában láthatókon a vonalvastagságot növeltük. A kijelzők neve a program által adott, persze igény esetén ezt is változtathatjuk.
Valamennyi szimuláció SI mértékegységekkel történt. A soron következő, „.vi” fájlokkal megjelenített diagramokon az alábbi SI prefixum jelöléseket látjuk:
u: mikro; n: nano; m: mili
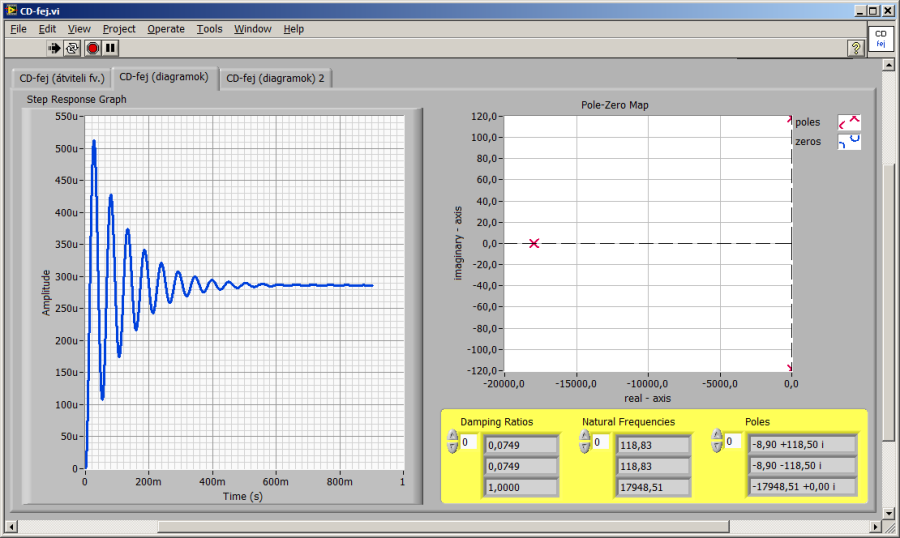
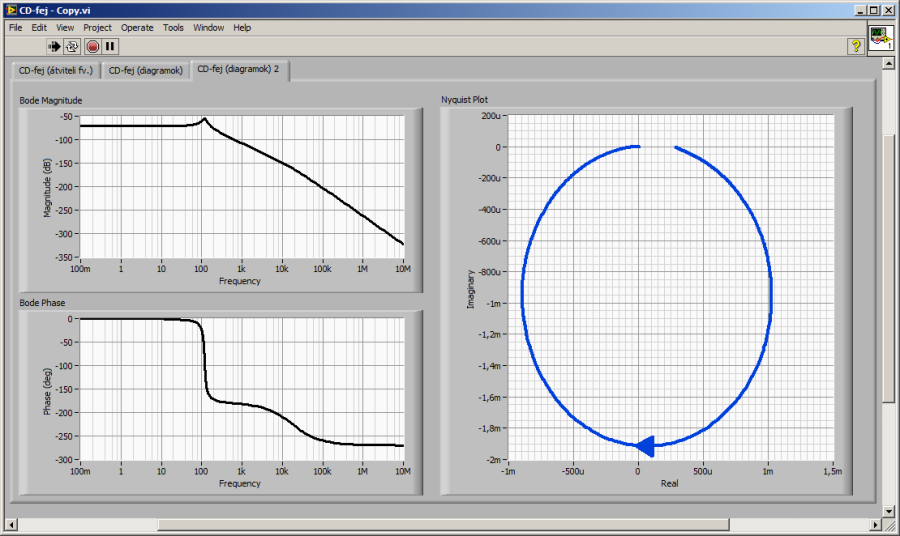
Az eredmények alapján felvetődik, hogy a legtávolabbi pólus elhanyagolásával vizsgáljuk a rendszert.
15.3. A modell egyszerűsítése a számított eredmények alapján
A konkrét paraméterek behelyettesítésével felírt átviteli függvény nevezőjének és a paraméteresen adott általános elsőrendű tag és másodrendű tag soros kapcsolásával előállított átviteli függvény nevezőjének egyenlővé tételével és az s hatványokra vonatkozó három egyenlet megoldásával kapjuk az elsőrendű tag T időállandóját, valamint a másodrendű tag ξ csillapítási tényezőjét és T0 időállandó jellegű paraméterét.
Az egyenletrendszer megoldásához a GNU GPL licenc által szabályozott hozzáférésű Maxima (http://maxima.sourceforge.net/) számítógépes algebra rendszert (a wxMaxima grafikus felületet) használjuk a COMA, COntrol engineering with MAxima (http://www.austromath.at/daten/maxima/zusatz/) kiegészítővel. A Maxima rendszer hivatalos dokumentációja [16.4.] mellett az interneten igen sok oktatóanyag és mintapélda található. A COMA (COntrol engineering with MAxima) szabályozástechnikai számításokat megkönnyítő kiegészítő [15.4.] angol és [15.5.] német leírása mellett mintapéldákat is letölthetünk.
A wxMaxima munkafüzetben szereplő számítások és az egyenletrendszer megoldásai az alábbi táblázatban szerepelnek.
Az elhanyagoláshoz szükséges wxMaxima számítások:
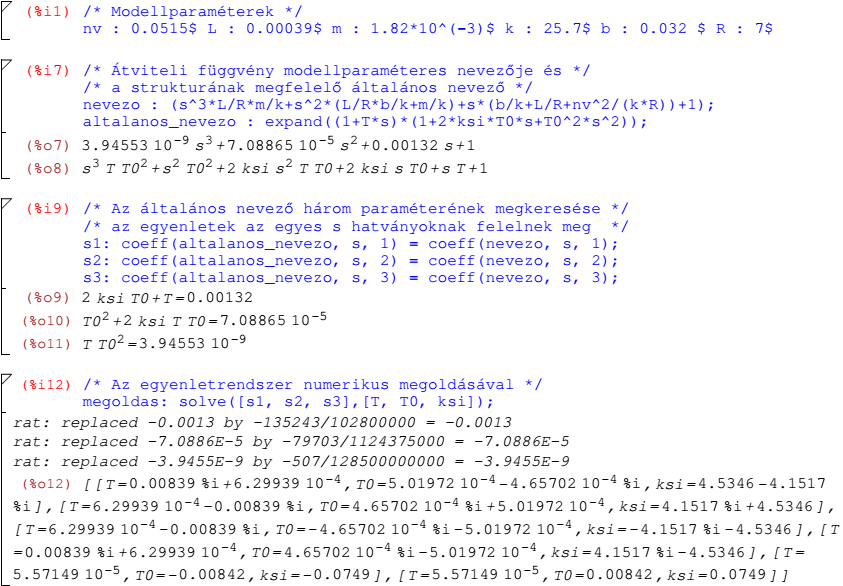
Az egyetlen szóba jövő megoldás az utolsó a listában (csupán itt szerepel három valós érték), ahonnan látszik, hogy T két nagyságrenddel kisebb T0-nál, tehát valóban elhanyagolhatjuk:
T = 5,571493182021775e-5
T0 = 8,4152416857412e-3
ξ = 0,074856931881115
A wxMaxima munkafüzet folytatásában szerepel az eredeti és az elhanyagolással számított átmeneti függvény összehasonlítása. Az átmeneti függvényt az átviteli függvény és az egységugrás gerjesztés Laplace-transzformáltjának szorzatából a COMA csomagban lévő numerikus inverz Laplace-transzformációval (nilt) határozzuk meg. és ábrázoljuk. A diagramról kiderül, hogy valóban igen kicsi az eredeti és az elhanyagolással előállított matematikai modell közötti eltérés.
Az eredeti és az elhanyagolással kapott rendszer átmeneti függvényének összehasonlítása wxMaxima+COMA felhasználásával:
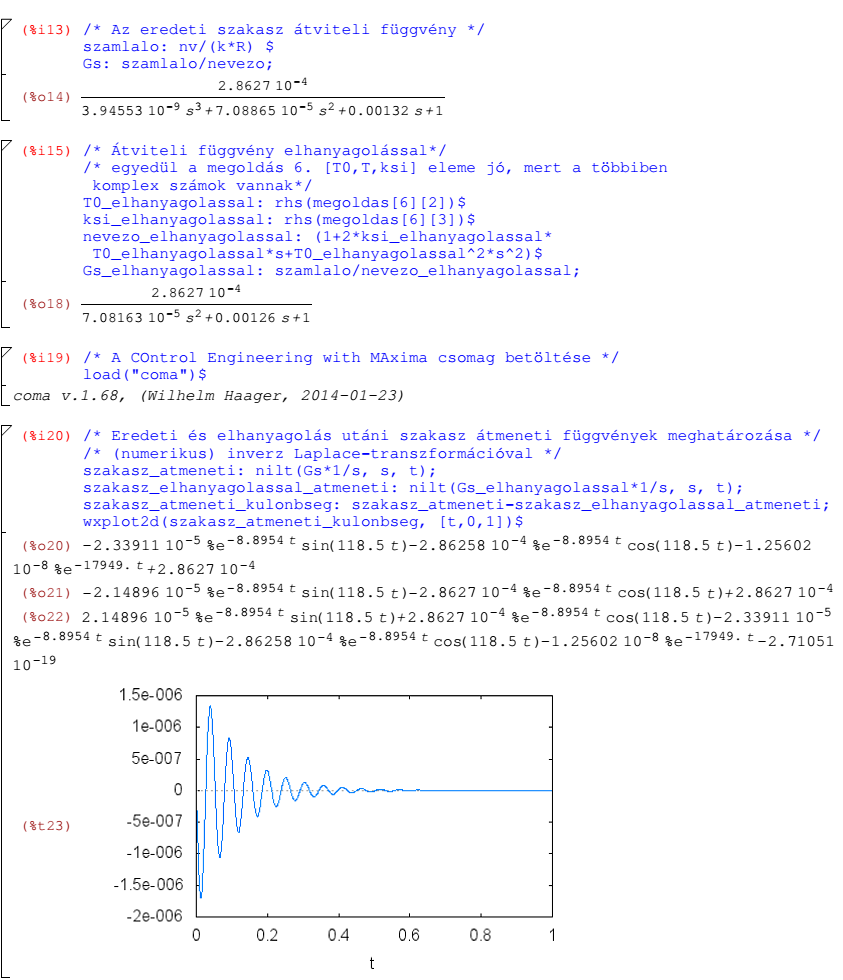
Az alábbiakban az eredeti harmadrendű és az elhanyagolás utáni másodrendű (lengő) rendszer LabVIEW-ban készített megfelelő ábrái szerepelnek.
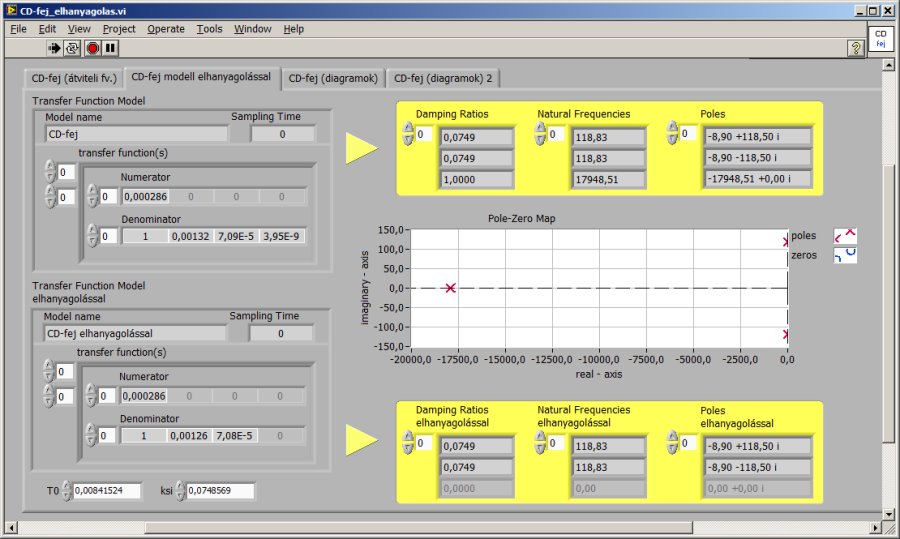
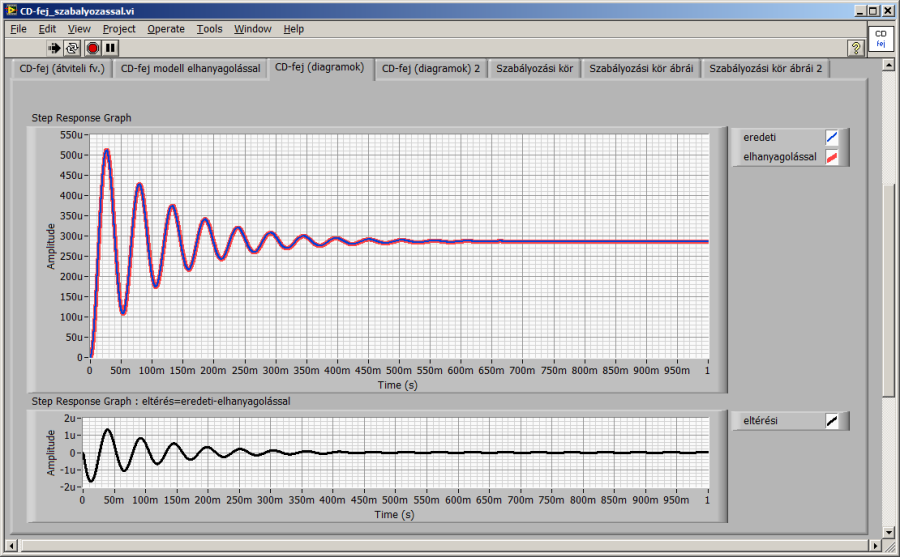
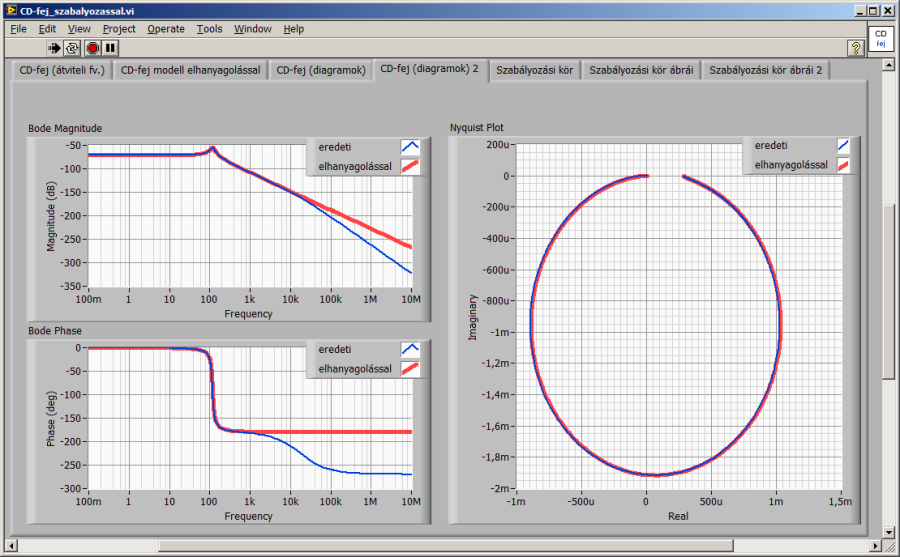
15.4. Szabályozás tervezése
A 6.4. szakasz fejezetből megismertük a szakasz matematikai modelljét, és láttuk a 15.1. szakasz fejezet végén a paraméterek kiindulási értékeit. Meggyőződtünk arról, hogy a szabályozókör tervezéséhez elegendő a szakasz másodrendű modelljét használni.
Kizárólag oktatási céllal, és nem „próbálgatással” megmutatjuk először azt, hogy a legegyszerűbb szabályozó, a P-tag nem elegendő a zárt kör optimálisnak tartott dinamikának beállításához beállításához. Ez az optimális viselkedés a legrövidebb beállási idő mellett, a legkisebb túllendülést jelenti. A tervezés folyamatában a szimulációs lépések ugyancsak oktatási céllal vannak részletezve.
A szakasz átmeneti függvényből és a pólus-zérus térképből jól látszik, hogy a szakasz dinamikai tulajdonságai az elvárt stabilitású, gyorsaságú és pontosságú működést önmagában nem biztosítják. A gyors és előírt pontosságú pozícionáláshoz szükséges dinamikai tulajdonságoknak nem felel meg az átmeneti függvényen látható nagymértékű túllendülés és az ezt követő viszonylag lassan csillapodó lengés. A csillapítás kicsi ugyan, de óriási előny, hogy a rugalmas egyenes vezeték kizárólag a Kelvin-modellnek megfelelő belső csillapítással rendelkezik, semmiféle gördülő, vagy csúszó mechanikai vezeték nem okoz problémát a maradó hiba formájában. Ehhez, a kis csillapítású szakaszhoz mindenképpen szükséges a szabályozás, hogy az előírt dinamikai tulajdonságokat be lehessen állítani.
Először szabályozó nélkül (tulajdonképpen egységnyi átviteli tényezőjű P-szabályozóval), a szabályozási kör visszacsatoló ágában szintén egységnyi átviteli tulajdonságot feltételezve vizsgáljuk az egyszerűsített másodrendű rendszert.
A visszacsatoló ágban lévő egységnyi átvitel megfelelően közelíti az egyébként szabályozási körökben használatos érzékelő és jelátalakító dinamikai tulajdonságait.
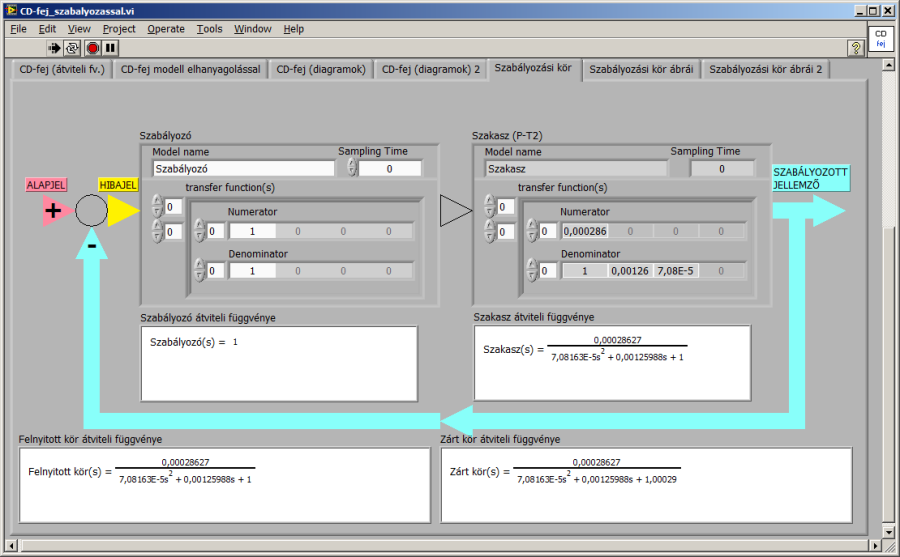
A felnyitott és a zárt kör eredő átviteli függvényének előállításához (kör) a CD Series.vi és a CD Feedback.vi nevű, Control Design & Simulation/Control Design/Model Interconnection paletta útvonalon elérhető blokkokat használhatjuk.
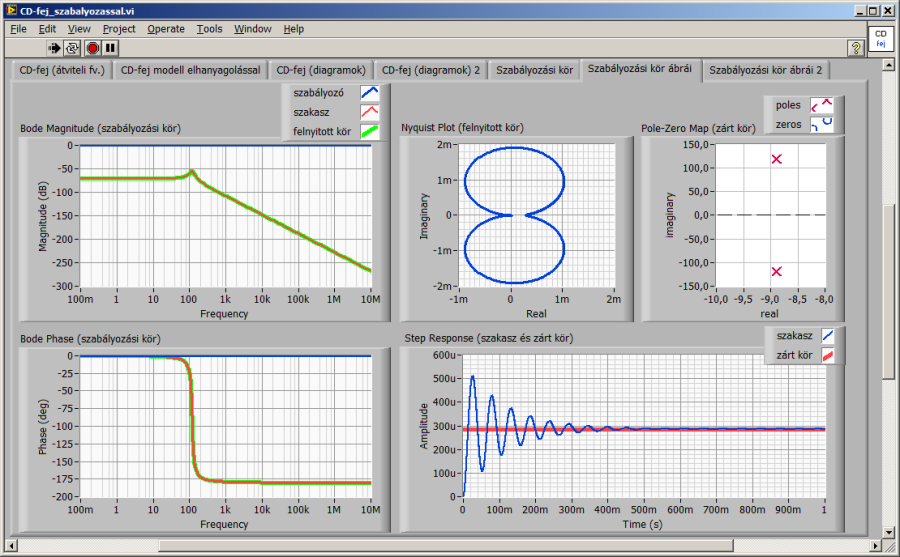
A fenti ábrán jól látszik, hogy az egységnyi arányos szabályozással a felnyitott kör (ebben az esetben a szakasz) és a zárt kör átviteli tulajdonságai gyakorlatilag azonosak. Ezt a wxMaxima+COMA munkafüzet számításai is alátámasztják.
Az elhanyagolással kapott szakasz mint felnyitott kör és az ebből származó zárt szabályozási kör átmeneti függvényének összehasonlítása wxMaxima+COMA felhasználásával:
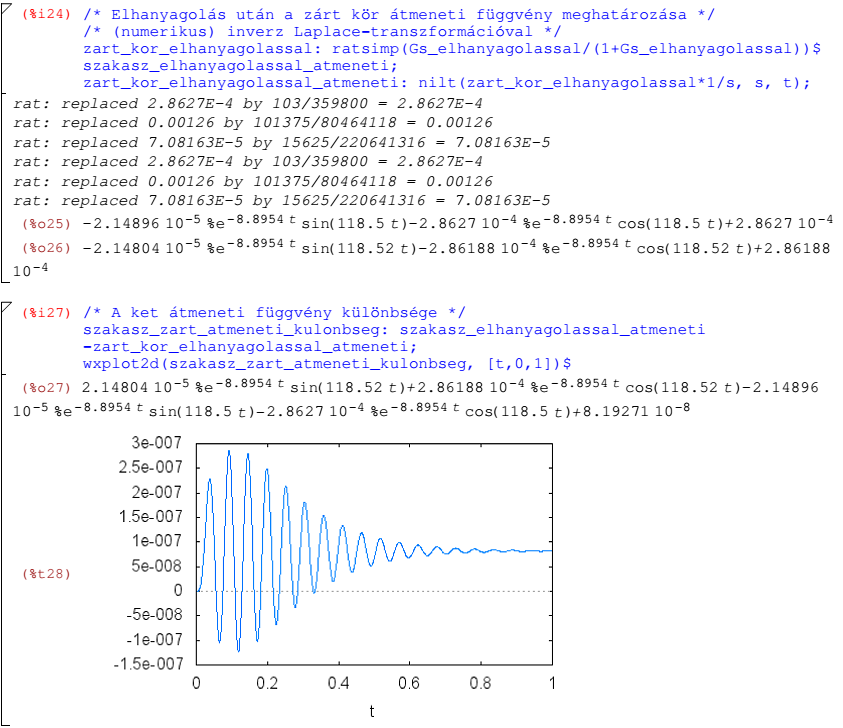
A fentiek alapján mindenképpen el kell helyeznünk egy megfelelően választott struktúrájú és paraméterezésű szabályozót az előírt dinamikai tulajdonságok biztosításához.
A szabályozó tervezésénél, ha az adott szakasz paraméterei lehetővé teszik, választhatunk úgy PID-jellegű struktúrát, hogy a szabályozó átviteli függvényének számlálója egyezzen meg a szakasz átviteli függvényének nevezőjével. Így megteremtjük a lehetőséget a szakasz „kellemetlen tulajdonságú” pólusainak áthelyezésére, megőrizve a (zárt szabályozási) rendszer másodrendű jellegét.
Ez a PID-jellegű struktúra valós pólusú szakaszok esetén nevezhető kettős töréspontáthelyező algoritmusnak. A szakasz két töréspontját (pólusát) a szabályozó két (a TA és TC jellemzővel adott) zérusa kompenzálja, az előírt dinamikai tulajdonságokat biztosító felnyitott szabályozási körbeli gyököket pedig a szabályozó (TB és TD időállandónak megfelelő) zérusai adják. Az AC erősítési tényezővel biztosíthatjuk az integráló tulajdonságot nem tartalmazó felnyitott körű szabályozás megfelelően kicsi állandósult hibáját (azaz előírt pontosságát).
|
|
(15.17) |
Esetünkben olyan pólus áthelyező struktúrára van szükség, amivel a szakasz alulcsillapított (konjugált komplex gyökpárral adott) pólusait közömbösítjük.
|
|
(15.18) |
A zárt kör előírt dinamikai tulajdonságainak biztosításához, vagyis az aperiodikus átmeneti függvényhez szükséges mértékű fázistartalékhoz, a gyors beálláshoz tartozó nagy vágási körfrekvenciához és a pontossághoz tartozó elegendően kicsi maradó hibát biztosító kisfrekvenciás erősítéshez kell méreteznünk a választott szabályozó struktúra paramétereit. A szimuláció ismételt futtatásával, különböző paraméter beállításokkal elérhetjük az igényeinknek megfelelő zárt kör dinamikát.
Az alábbiakban a szakasz pólusait kiejtő, egyébként nem megvalósítható – de számításokban szerencsére kezelhető – szabályozó struktúrával kezdjük a vizsgálódást.
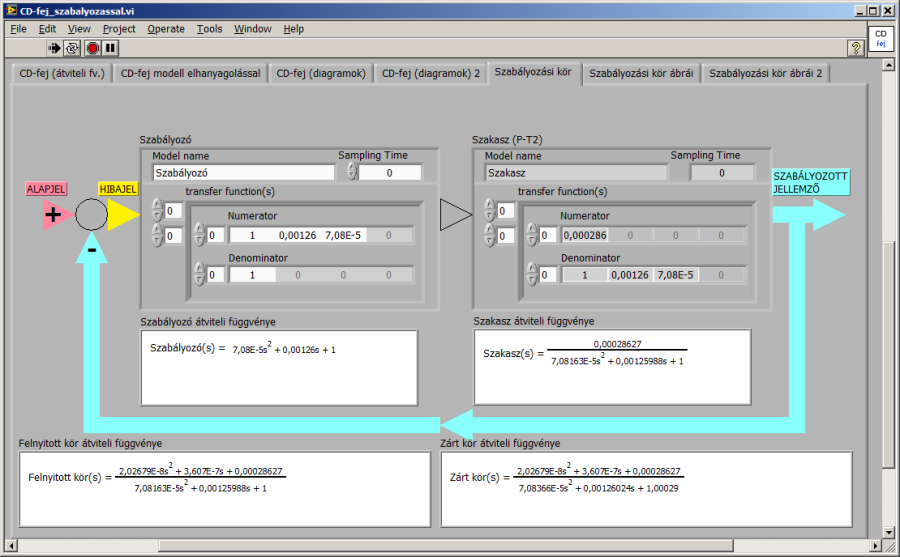
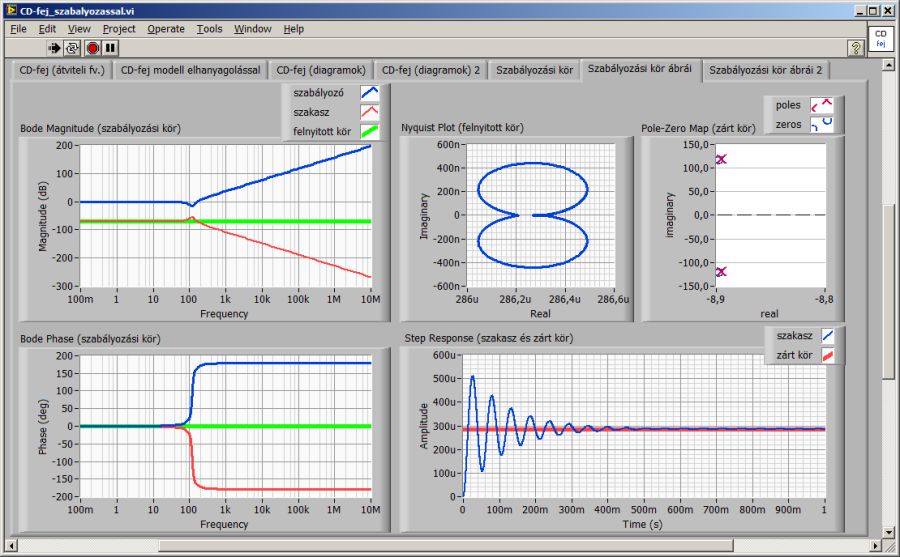
A szabályozó megvalósíthatóságához elengedhetetlen, hogy átviteli függvényében a számláló polinom fokszáma ne legyen alacsonyabb a nevező polinom fokszámánál. Ha az előző ábrákon látható módon a szabályozó zérusaival semlegesítjük a szakasz pólusait,
a szabályozó pólusaival definiálhatjuk a felnyitott kör és természetesen ezen keresztül a zárt rendszer pólusait.
Az alábbi ábrákon szereplő megoldással például minimális túllendülésű zárt kör választ állíthatunk elő.
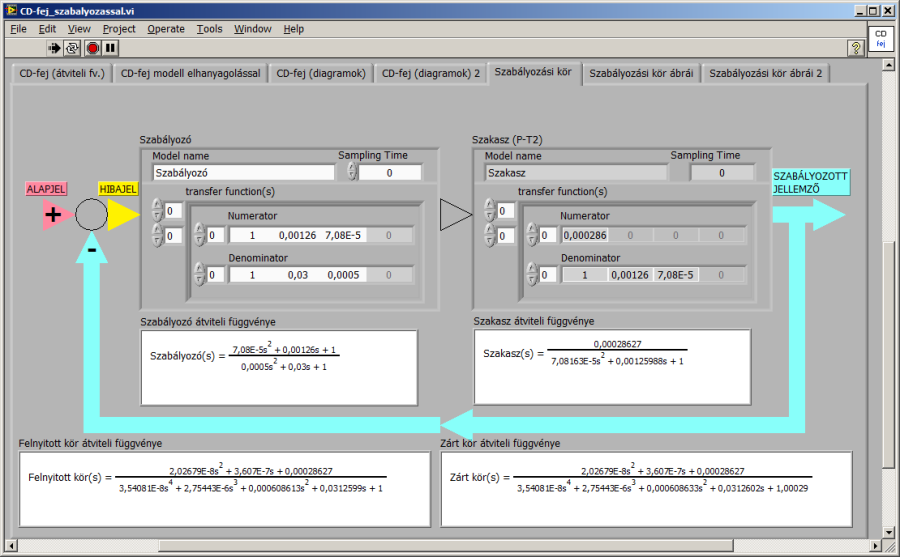
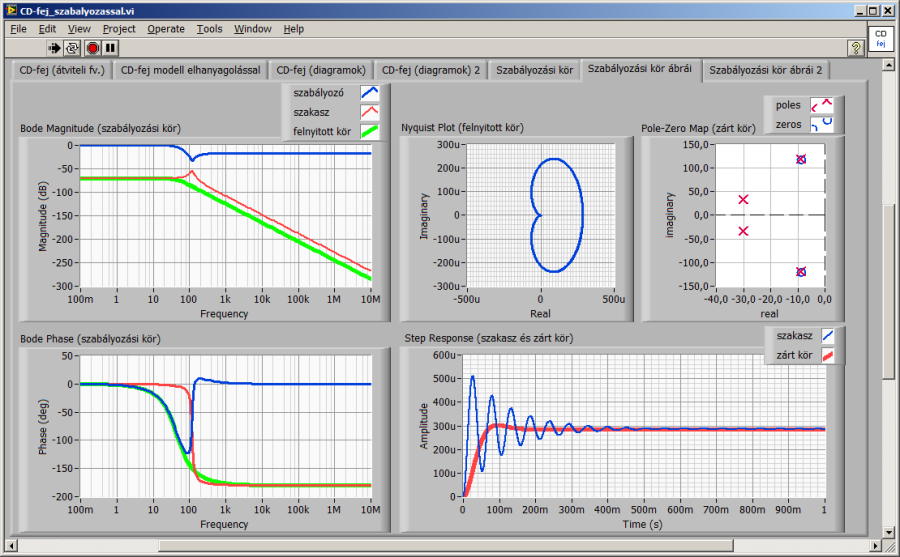
A szabályozástechnikában megismert különböző PID-jellegű struktúrák közül választva és a szabályozó paramétereit folyamatosan változtatva a szimulációs program segítségével úgy alakíthatjuk a zárt kör válaszát, hogy a célul kitűzött dinamikai sajátságokat elérjük. Ismert a szabályozástechnikából, hogy ezek a sajátságok a zárt kör domináns póluspárjára vonatkozóan a ξ≈0.7 csillapítási számmal biztosíthatóak. Így adódik a legkisebb túllendülés, a legrövidebb beállási idő és a PID szabályozás integrátorának köszönhetően a zérus maradó hiba.
Szakirodalom
[15.1.] LabVIEW 2009 Help http://www.ni.com/pdf/manuals/371361f.zip.
[15.2.] LabVIEW Control Design User Manual, June 2009 http://www.ni.com/pdf/manuals/371057g.pdf.
[15.3.] LabVIEW 2009 Control Design and Simulation Module Help http://www.ni.com/pdf/manuals/371894d.zip.
[15.4.] Maxima, a Computer Algebra System: Documentation http://maxima.sourceforge.net/documentation.html.
[15.5.] COMA, Control Engineering with Maxima és Regelungstechnik mit Maxima http://www.austromath.at/daten/maxima/zusatz/Control_Engineering_with_Maxima.pdf.
16. fejezet - Golyósorsós pozícionáló szabályozásának tervezése és szimulációja
A 9. fejezet fejezetben szereplő golyósorsós mozgásátalakító matematikai modell struktúrájának előállítására mutatunk egyet a lehetséges módszerek közül.
A matematikai modell (átviteli függvény) paraméterezéséhez katalógusból válogatott adatokat használunk.
A matematikai modellel adott rendszer dinamikai (idő- és frekvenciatartománybeli) vizsgálata után szabályozót tervezünk, az ilyen jellegű valóságos rendszerekkel szemben támasztott irányítási célok figyelembe vételével. Elsődleges elvárás természetesen a stabilitás, mégpedig aperiodikus viselkedéssel, túllendülések nélküli, gyors és pontos (hibamentes) alapjel követéssel.
16.1. Matematikai modell előállítása
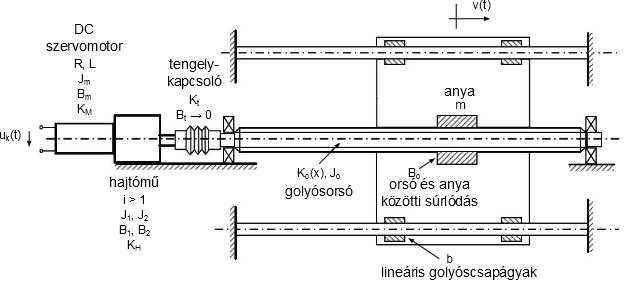
A vázlat nem géprajzi, hanem a működést szemlélteti. Ugyanakkor érdekes konstrukciós probléma a vezetékek rögzítése a keretben, és a tengely csapágyazása. Erről a 11. fejezet fejezet elején találunk rövid ismertetést. A rendszer működését ábrázoló „műszaki vázlat” alapján elkészíthetjük a struktúragráfot.

Az ábrán (és a további modellekben) szereplő fizikai mennyiségek:
|
u [V] |
feszültség | |
|
R [Ω] |
ellenállás | |
|
L [H=Vs/A] |
induktivitás | |
|
nv1=KM [Nm/A=Vs/rad] |
az elektrodinamikai energiaátalakító (váltó) ún. motorállandója | |
|
Ω [rad/s] |
szögsebesség | |
|
J [kg m2] |
tehetetlenség | |
|
B [Ns/rad] |
transzlációs mechanikai rendszerben értelmezett csillapítási tényező | |
|
K [Nm/rad] |
torziós rugómerevség | |
|
nt = i |
a hajtómű mint energiaátalakító (transzformátor) állandója | |
|
nv2=h/2π [m/rad] |
a forgó és haladó mozgás közötti energiaátalakító (váltó) állandója | |
|
m [kg] |
tömeg | |
|
b [Ns/m] |
transzlációs mechanikai rendszerben értelmezett csillapítási tényező |
Ugyan már a vázlatban is alkalmaztunk elhanyagolásokat (például a tengelykapcsolóban fellépő veszteséget elhanyagoljuk, Bt → 0), de modellünk még mindig igen összetett. Az energiatárolók száma: egy villamos (L), összevonással két torziós rugalmas (K), négy torziós tehetetlenség (J), valamint egy transzlációs mechanikai (m). Összesen nyolc energiatárolót számolhatunk össze, sőt ha külön részmodellként kezeljük a rugalmasságokat, még magasabb rendű rendszermodellt kapunk. Eddigi – legalább részrendszerenként értelmezhető – domináns póluspárokra vonatkozó ismereteinket és tapasztalatainkat megerősítik a konkrét katalógusadatok (fizikai mennyiségek) helyettesítésével számított matematikai modellek.
Az összevonható mennyiségek és az egyes részegységek sajátságai figyelembe vételével egyszerűsíthetjük a gráfot és két részrendszerre bonthatjuk.
Az alábbi konstrukciós adottságokból indulunk ki:
a DC motor induktivitása mint energiatároló a rendszerben lévő többi tárolóhoz képest gyors dinamikájú (nagyságrendekkel kisebb időállandójú), ezért elhanyagoljuk.
a hajtómű KH rugómerevsége nagy, ezért Ωm és Ω1 szögsebességek azonosak. A motor mechanikai paraméterei közül a Bm csapágycsillapítást és a Jm tehetetlenséget a hajtómű hasonló, de nagyobb értékű paramétereivel összevonva vesszük figyelembe (B1, B2 csillapítások és J1, J2 tehetetlenségek). Az egyszerűbb jelölés miatt a továbbiakban Je és Be paraméterekkel számolunk, de tudjuk, hogy:
|
|
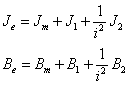
A hajtómű módosítása legyen olyan nagy értékű, hogy az Ω2 kimenő szögsebesség értékét a terhelés ingadozása nem befolyásolja. A hajtómű kimenetét ezért az Ω2 jelű generátorként vesszük figyelembe, mint a második részrendszer gerjesztését. A motor-hajtómű egység lehetséges modell-formáiról szól a 8. fejezet fejezet. A példában a 8.1.1. szakasz fejezetben bemutatott változatot alkalmazzuk, a tulajdonságok részletes leírását ott találjuk meg.
A golyósorsó és mechanikai környezete összes rugómerevségét egyetlen eredővel, Ko-val vesszük figyelembe. A részletes modellezés a 11. fejezet fejezetben látható. Az itt bemutatott példa a 11.2. szakasz fejezetben van részletesebben leírva, az „Elsőrendű motor és hajtómű egységgel” bekezdésben.
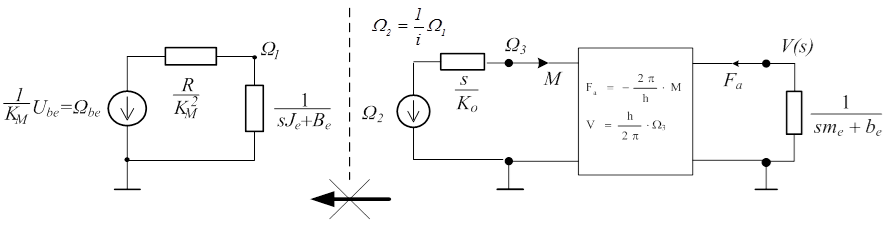
A fenti ábrán a bal oldali részrendszer a motort és a hajtómű hajtott oldalát tartalmazza, a második részrendszer tartalmazza a hajtott részrendszert.
A két részrendszer matematikai modelljét célszerű az átviteli függvényt eredményező hálózati (más néven impedancia) módszerrel, esetleg csomóponti vagy hurokmódszerrel előállítani, hiszen a sorba kapcsolt részrendszerek eredő átviteli függvénye az összetevők átviteli függvényének szorzata.
Az átviteli függvényes felírás miatt az időfüggvényként adott jeleket Laplace-operátoros tartományba transzformáljuk. Ha a csomóponti módszert (vagy a hurokmódszert) választjuk, szintén transzformálnunk kell a jeleket, sőt a modell jellegétől függően integráljukat és deriváltjukat. (A második részrendszer modelljét csomóponti módszerrel állítjuk elő.)
16.1.1. A hajtó részrendszer modellje
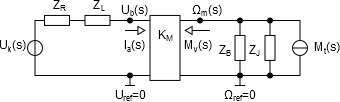
Az impedancia a keresztváltozó és az átmenő változó hányadosaként írható fel Laplace-operátoros tartományban.
a villamos rendszer általános impedanciája így
a rotációs mechanikai általános impedanciája így
Az egyes impedanciák:
a villamos oldalon
a disszipatív elem impedanciája

az induktív energiatárolót elhanyagoljuk, (impedanciája egyébként
 )
)
a mechanikai oldalon
a disszipatív elem impedanciája

az energiatároló impedanciája

a párhuzamosan kapcsolt elemek eredő impedanciája:
A rendszerben forrásként jelenik meg a villamos motorra kapcsolt Uk feszültség. A visszahatásból származó Mt terhelő nyomatékot elhanyagoljuk.
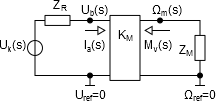
Az elektrodinamikai energiaátalakító (váltó) egyenletei
|
|
(16.1) | |
|
|
(16.2) |

ahol M [Nm] a forgatónyomaték, I [A] a villamos áram, Ω [rad/s] a szögsebesség, U [V] a feszültség és KM [Nm/A=Vs/rad] az energiaátalakító állandója.
A váltó egyenleteivel felírhatjuk a villamos résznek megfeleltethető mechanikai impedanciát
|
|
(16.3) |

Mivel a forgatónyomaték felel meg a villamos áramnak, a feszültségforrást szögsebesség forrással helyettesíthetjük. Így az egyszerűsített modellt villamos feszültségosztó analógiájaként szögsebesség osztóként (keresztváltozó osztóként) modellezhetjük.
A szögsebesség-osztó egyenlete és egyben a hajtó részrendszer átviteli függvénye
|
|
(16.4) |
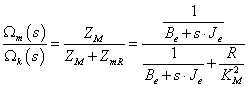
Egyszerűsítve
|
|
(16.5) |

Időállandós alakra átírva (és a szögsebességgel helyettesített feszültséget visszaírva) látszik a modell jellege (elsőrendű, azaz P-T1)
|
|
(16.6) |
16.1.2. A hajtott részrendszer modellje
Oktatási célból a hajtott rendszer átviteli függvényét időtartományból kiindulva, csomóponti egyenletek felhasználásával határozzuk meg. Ezt azért tesszük, mert a 11. fejezet fejezetben, ahol a golyósorsós szakasz tervezését és méretezését találjuk, az átviteli függvényt impedancia módszerrel határoztuk meg. A két módszer lépései és munkaigénye így összehasonlíthatóvá válnak.

A stuktúragráf alapján a csomóponti egyenletek:
|
|
(16.7) | |
|
|
(16.8) |


Az egyes passzív elemekre vonatkozó összefüggések idő- és Laplace-operátoros tartományban (a deriválásnál zérus kezdeti értéket feltételezve):
a rotációs mechanikai rendszerben (figyelembe véve, hogy
 )
)az egyik energiatároló (torziós rugó) egyenlete:

a másik energiatároló egyenlete:


a passzív elem egyenlete:


a transzlációs mechanikai rendszerben (figyelembe véve, hogy
 )
)az energiatároló (tömeg) egyenlete:

a passzív elem egyenlete:

A csomóponti egyenletekbe helyettesítjük a Laplace-operátoros tartománybeli összefüggéseket:
|
|
(16.9) | |
|
|
(16.10) |


Átrendezve
|
|
(16.11) | |
|
|
(16.12) |


Az rotációs-transzlációs mechanikai energiaátalakító (transzformátor) egyenletei
|
|
(16.13) | |
|
|
(16.14) |
Behelyettesítve a váltóegyenleteket
|
|
(16.15) | |
|
|
(16.16) |

Mindkét egyenletből kifejezve az M forgatónyomatékot az átviteli függvény meghatározására alkalmas egyenletet kapunk (egyik változó kimenő jel, azaz a v sebesség V(s) Laplace-transzformáltja, a másik a bemenő jel, az Ω2(s) szögsebesség).
|
|
(16.17) |

A változókat csoportosítva és együtthatóikat s-hatványai szerint rendezve
|
|
(16.18) |

Az egyenlet mindkét oldalát s-sel szorozva
|
|
(16.19) |

A hajtott részrendszer átviteli függvénye
|
|
(16.20) |

Átrendezve
|
|

|
|
Időállandós alakra átírva látszik a modell jellege (másodrendű, azaz P-T2)
|
|
(16.21) |
16.1.3. A hajtómű modellje
A hajtómű egyszerűsített modellje az i áttételnek megfelelő arányos (P) taggal állítható elő, a hajtó részrendszer Ωm szögsebességét és hajtott rendszer Ω2 szögsebességét felhasználva az átviteli függvény felírásához.
|
|
(16.22) |
16.1.4. A teljes szakasz modellje
A kapott három átviteli függvény (G1 hajtó részrendszer, Gi hajtómű és G2 hajtott részrendszer) soros eredőjeként (szorzataként) állítható elő a bemenő Uk feszültség és a mozgatott rendszer v sebessége közötti kapcsolat.
|
|
(16.23) |

Mivel számunkra nem a sebesség, hanem az elmozdulás lényeges, az x elmozdulás és v sebesség közötti összefüggést is figyelembe kell vennünk (a sebesség az elmozdulás idő szerinti deriváltja).
|
|
(16.24) |
Ezzel a x elmozdulás és az Uk feszültség között felírható átviteli függvény
|
|
(16.25) |

Behelyettesítve
|
|
(16.26) |
A rendszer harmadrendű integráló (I-T3) típusú
|
|
(16.27) |

16.2. Szimulációs modell
A matematikai modell előállításához és a szabályozó tervezéséhez konkrét komponensek kiválasztása és a szükséges paraméterek behelyettesítése után kapott átviteli függvényt használunk.
|
Elektromechanikus energiaátalakító (váltó) állandója |
KM = 0,022 Nm/A |
|
Hajtómű áttétele |
i = 134 |
|
Motor ellenállása |
R = 2,05 Ω |
|
A motor és hajtómű tehetetlenségi nyomatéka |
Je = 13*10-7 kg/m2 |
|
A motor és hajtómű csillapítási tényezője |
Be = 5*10-5 Ns/rad |
|
A golyósorsó menetemelkedése |
h = 0,002 m |
|
A mozgatandó tömeg |
m = 1,35 kg |
|
Az anya és orsó közötti csillapítási tényező |
b = 2*10-4 Ns/m |
|
Az orsóra számított eredő torziós rugómerevség |
Ko = 2,107 Nm/rad |
|
Az orsó csillapítási tényezője |
Bo = 3,5*10-3 Ns/rad |
|
Az orsó tehetetlenségi nyomatéka |
Jo = 1,2*10-6 kg/m2 |
A GNU GPL licenc által szabályozott hozzáférésű Maxima (http://maxima.sourceforge.net/) számítógépes algebra rendszerrel számoljuk a katalógusadatok alapján az átviteli függvény együtthatóit. A Maxima rendszer hivatalos dokumentációja [16.4.] mellett az interneten igen sok oktatóanyag és mintapélda található. A COMA (COntrol engineering with MAxima) szabályozástechnikai számításokat megkönnyítő kiegészítő [16.5.] angol és német leírása mellett mintapéldákat is letölthetünk.
Az átviteli függvény együtthatóinak meghatározása wxMaxima programmal:
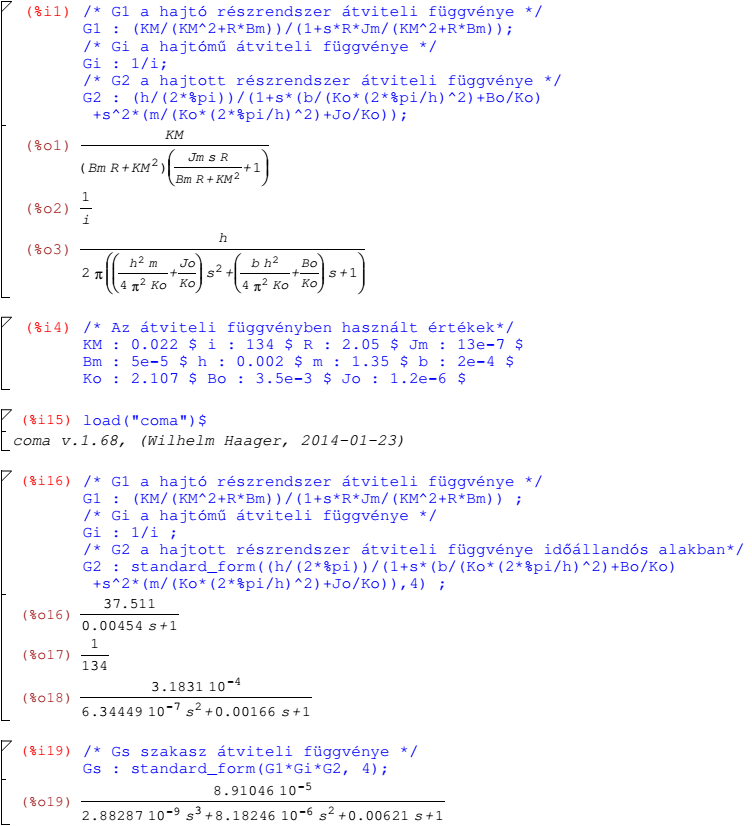
A National Instruments cég LabVIEW (Laboratory Virtual Instrumentation Engineering Workbench) szoftvercsomagja (http://www.ni.com/labview/) 2009-es verziójában, a Control Design and Simulation Module (http://www.ni.com/labview/cd-sim/) elemkészletével készült az átviteli függvény szimbolikus leképezése. A LabVIEW és a kiegészítő használatában a [16.1.], [16.2.], [16.3.] hivatalos források mellett szintén találhatunk interneten hozzáférhető segédanyagokat és mintapéldákat.
Az áttekinthetőség érdekében a G1(s), Gi(s) átviteli függvények soros eredőjéhez szükséges számláló és nevező együttható képletek külön szerepelnek a hajtott részrendszer G2(s) átviteli függvény előállításához szükséges összefüggésektől.
A két – szimbolikus átviteli függvényével adott – sorba kapcsolt rendszer eredőjét előállító programrészletet könnyen elkészíthetjük a Control Design & Simulation/Control Design/Model Interconnection/CD Series.vi használatával.
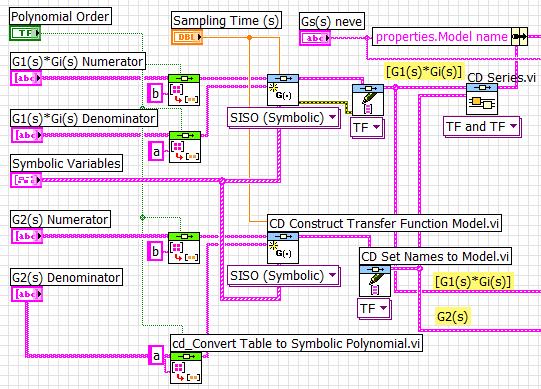
A sebesség-elmozdulás átalakításhoz szükséges integrálást 1/s átviteli függvényével, az előzőleg kapott átviteli függvénnyel szintén sorba kapcsolva vesszük figyelembe. A későbbiekben erre „szakasz integrálással” néven hivatkozunk.
Valamennyi szimuláció SI mértékegységekkel történt. A soron következő, „.vi” fájlokkal megjelenített diagramokon az alábbi SI prefixum jelöléseket látjuk:
u: mikro; n: nano; m: mili
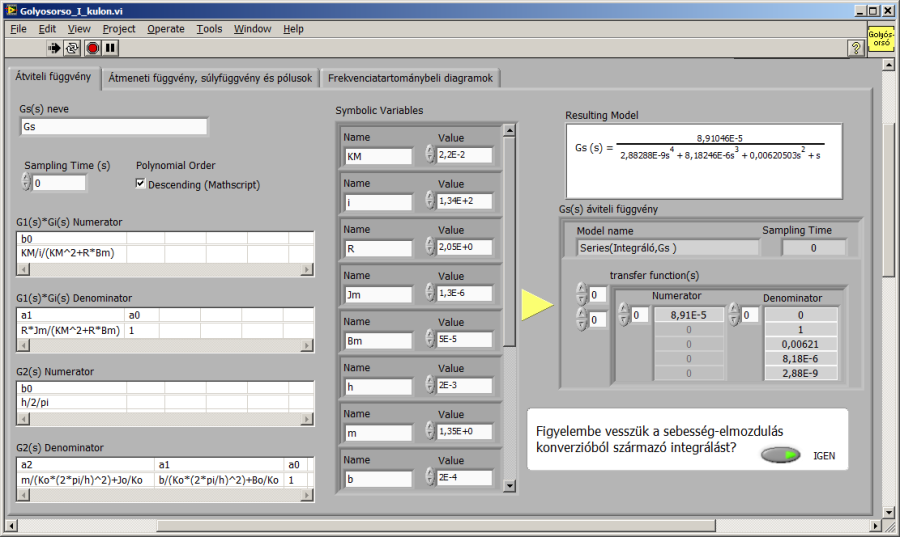
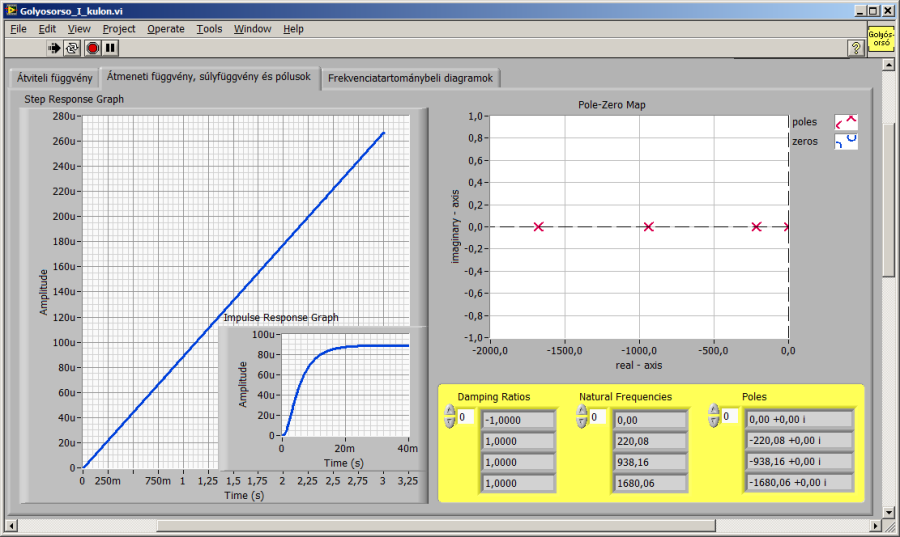
A későbbiek szempontjából fontos megjegyeznünk, hogy az integrátor nélküli szakaszban nincs konjugált komplex gyökpár, azaz a szakasz nem lengő jellegű.
A következő ábrán a „szakasz integrálással” frekvenciatartománybeli leképezései szerepelnek.
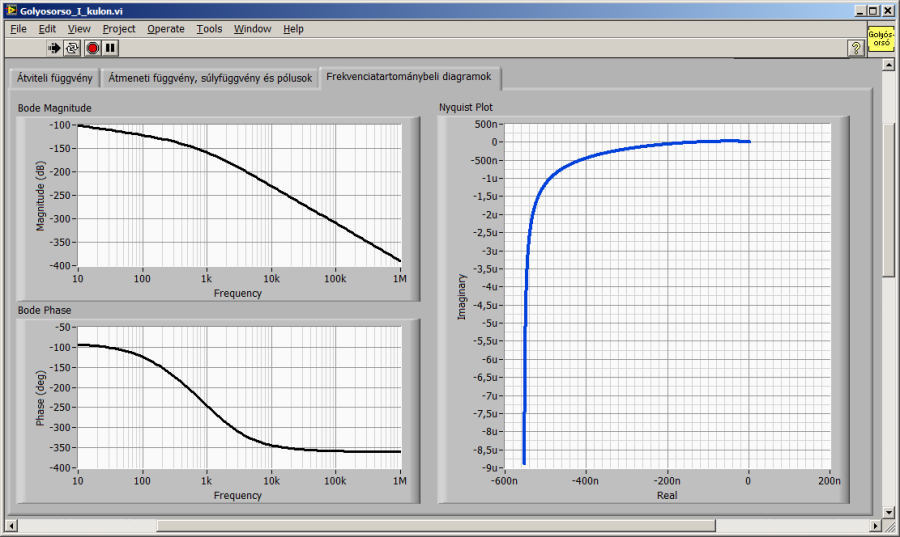
A szakasz dinamikai tulajdonságainak szemléletes ábrázolása miatt érdemes az integrálás nélkül is ábrázolni a jellegzetes idő- és frekvenciatartománybeli diagramokat. A sebesség-elmozdulás konverzió miatt szükséges integrálást a programunk előlapján lévő kapcsolóval vehetjük figyelembe. A megoldás az alábbi programrészleten látható, az előlapi logikai (Boolean adattípusú) kapcsoló neve „Integráló tag?”, az elágazás (Case struktúra) igaz (True) lapján a konstansként összeállított integráló tag és a G1(s)·Gi(2) G2(s) integráló nélküli szakasz soros eredője. A hamis (False) lapon az integráló hatást nem vesszük figyelembe, a G1(s)·Gi(2) G2(s) átviteli függvényt vezetjük tovább.
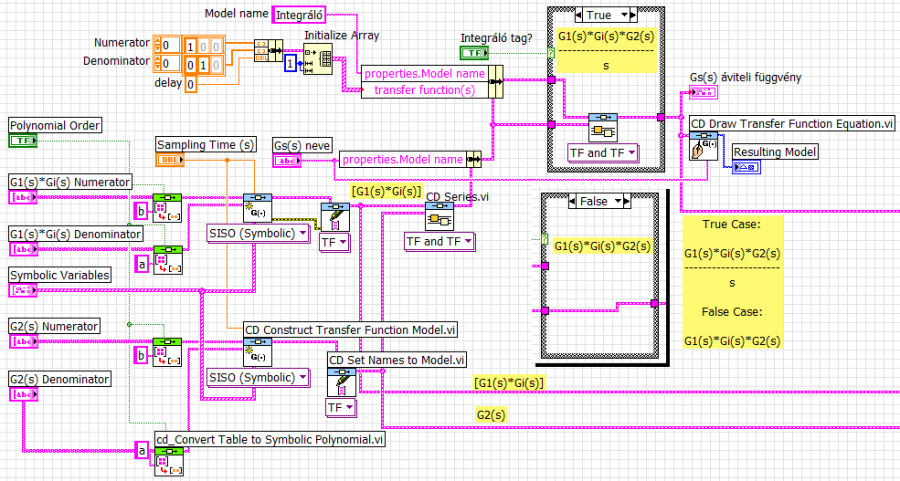
Az alábbi ábrákon az integráló hatás nélküli átviteli függvény és az idő- és frekvenciatartománybeli leképezései szerepelnek.
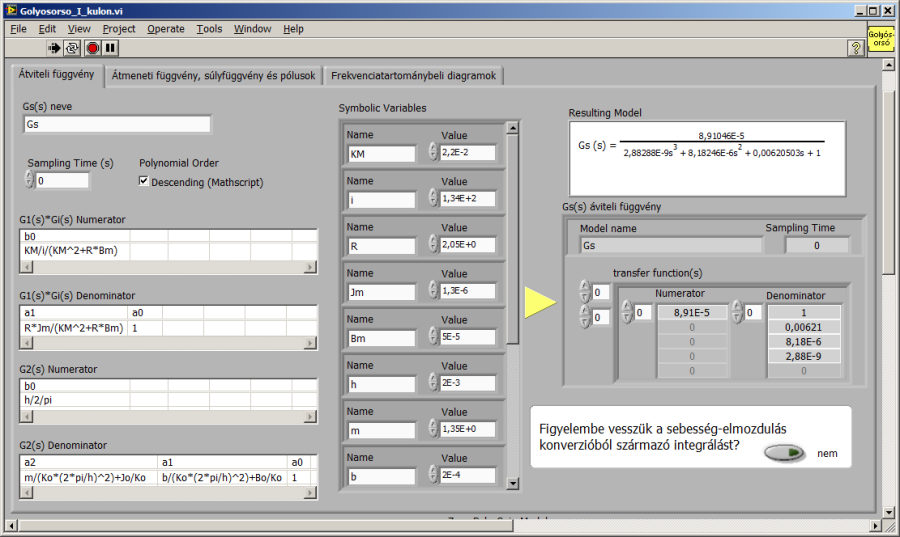
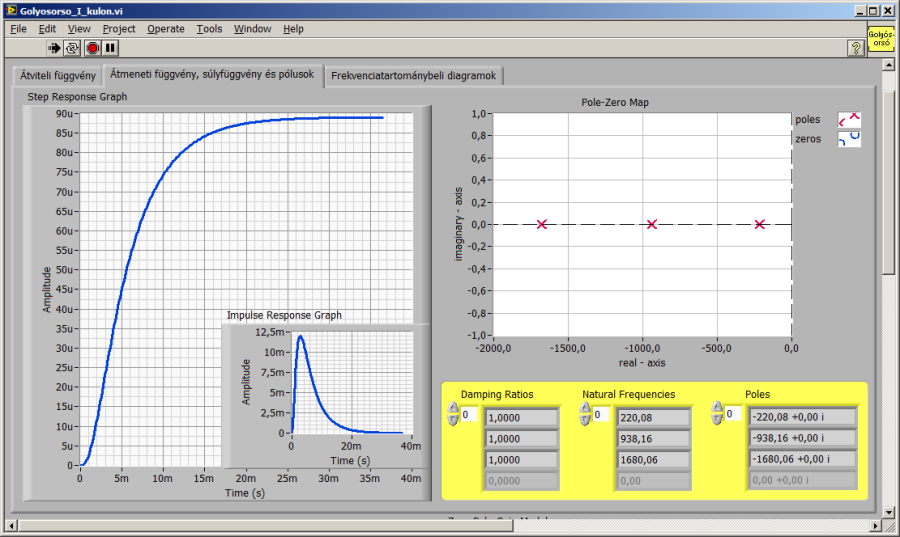
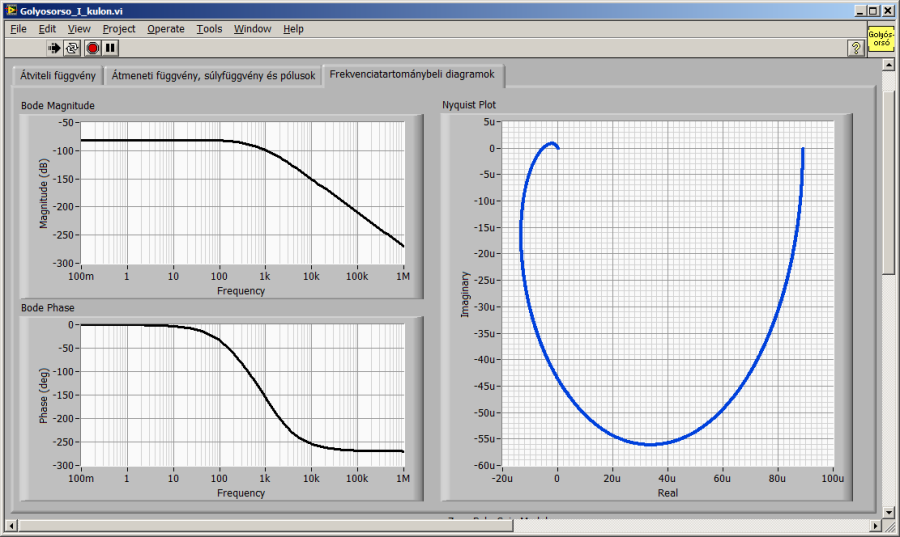
16.3. A modell egyszerűsítése a számított eredmények alapján
A szabályozó tervezéshez vizsgáljuk meg a szakasz hajtó részrendszerének egyetlen, valamint a hajtott részrendszer két pólusát (és a belőlük számítható időállandókat). Az átviteli függvényből (TF, Transfer Function) a zérus-pólus-erősítés (ZPK, Zero-Pole-Gain) matematikai modellt a Control Design & Simulation/Control Design/Model Conversion/CD Convert to Zero-Pole-Gain model.vi használatával kapjuk. A három időállandót egyszerűen számíthatjuk a pólusokból.
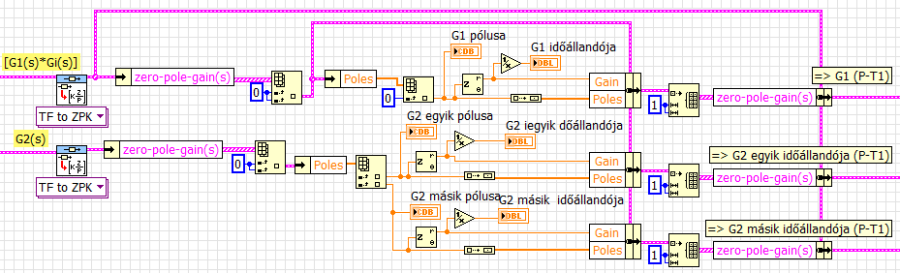
A pólusokból számított időállandóakkal megrajzolhatjuk a három, egységnyi erősítésűnek választott elsőrendű rendszer alább látható átmeneti függvényét.
|
pólusa |
időállandója | |
|
G1 |
-220,075 +0 i |
4,544E-3 |
|
G2 egyik |
-1680,06 +0 i |
5,952E-4 |
|
G2 másik |
-938,163 +0 i |
1,066E-3 |
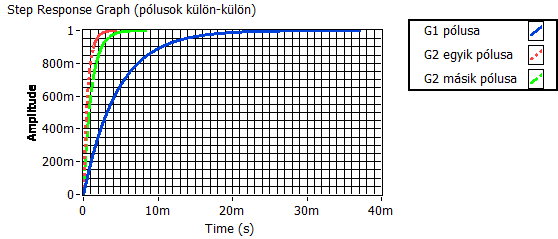
A szabályozótervezéshez figyelembe vehető elhanyagolást az átmeneti függvények ábrázolása alapján is indokolhatjuk. Az alábbiakban a két „lassú” pólusú másodrendű rendszert hasonlítjuk össze a háromtárolós modellel és feltüntetjük a szabályozásba nem bevont „gyors” pólus dinamikáját, szintén átmeneti függvényen.
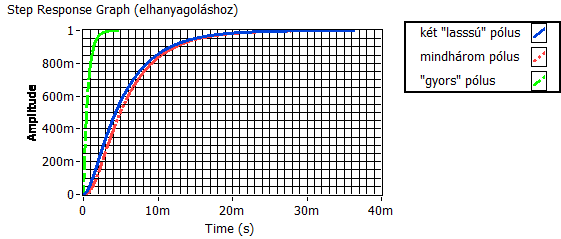
Az elhanyagoláshoz szükséges számításokat a wxMaxima munkafüzetben is elvégezzük és ebben ábrázoljuk az eredeti és az elhanyagolás utáni rendszer átmeneti függvényének különbségét.
A harmadrendű szakasz egyszerűsítése másodrendűvé és az elhanyagolás létjogosultsága wxMaxima programmal:
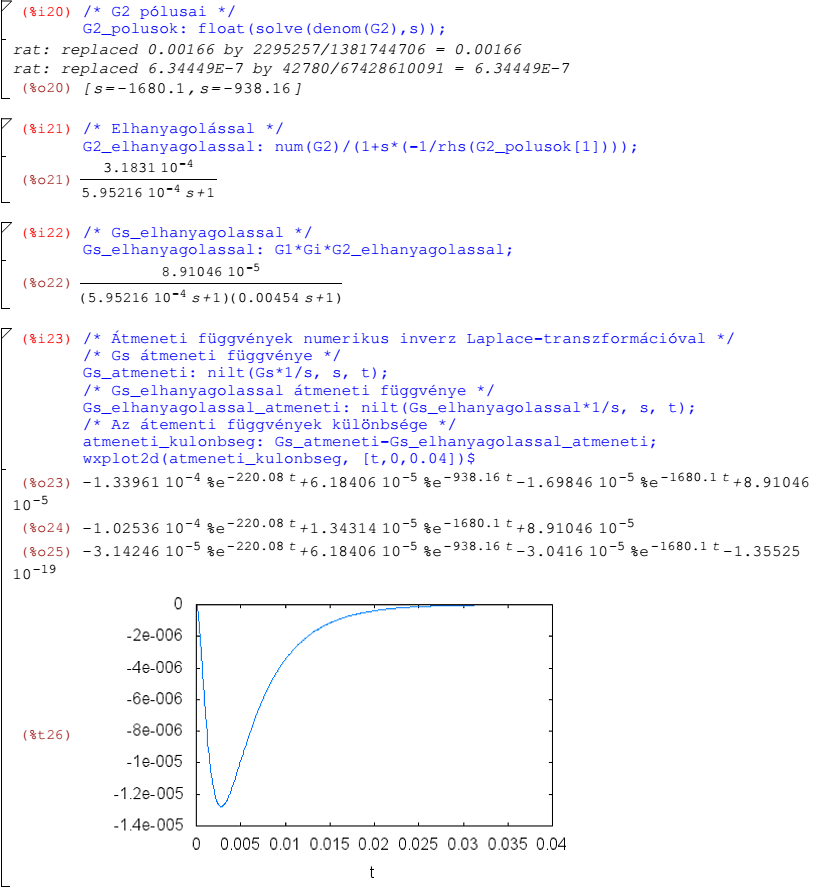
Az elhanyagolás indoklását alátámaszthatjuk a három elsőrendű rendszer Bode-diagramjával is. Az alábbi diagramokon látszik, hogy a két „lassú” pólus („G1 pólusa” és „G2 egyik pólusa”) között nincs jelentős eltérés (az időállandók viszonya durván 4,3). A „gyors” pólusnak („G2 másik pólusa”) megfelelő töréspont viszont hozzávetőleg egy dekáddal jobbra esik az előzőektől.
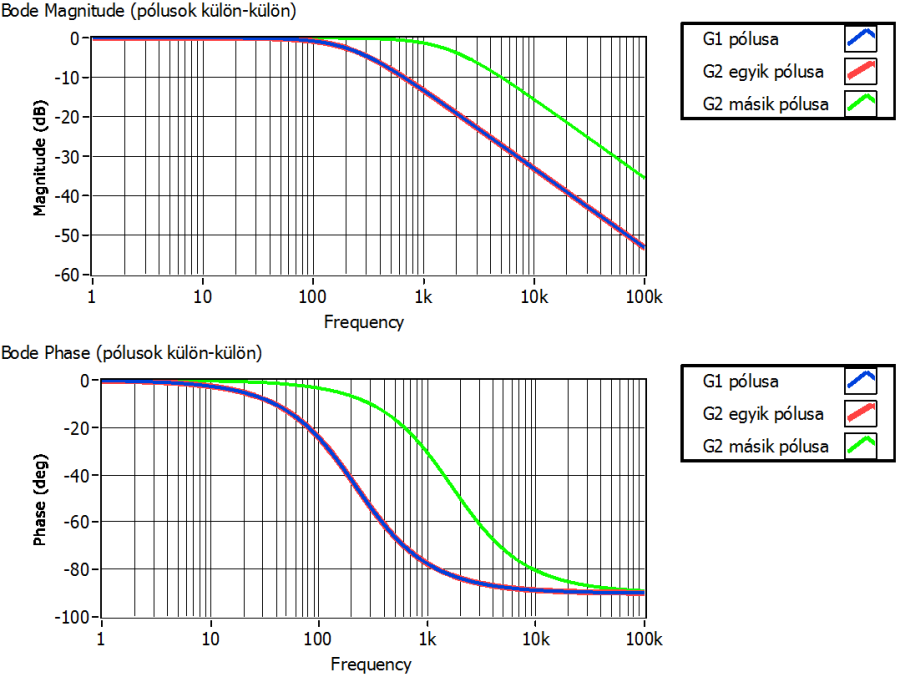
E megfontolás alapján a szakaszt a G1(s) hajtó rész, a Gi(s) hajtómű és a G2(s) hajtott rész domináns időállandót tartalmazó elsőrendűvé? (csak a gyors pólust hagytuk el, tehát másodrendű lett a szakasz) egyszerűsített modelljével közelítjük.
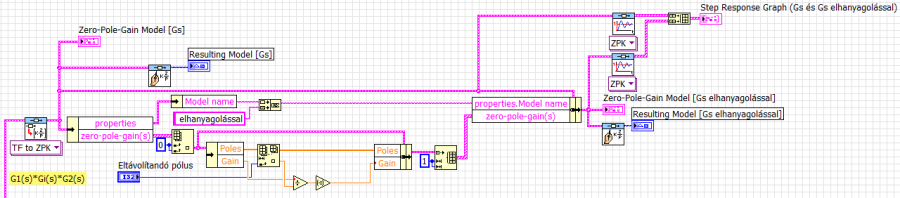
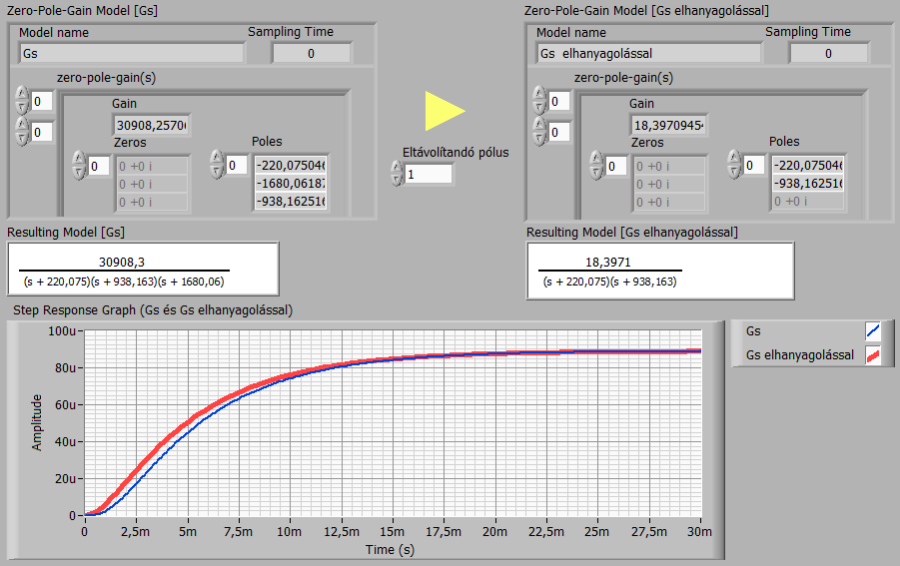
16.4. Szabályozás tervezése
Először szabályozó nélkül (tulajdonképpen egységnyi átviteli tényezőjű P-szabályozóval), a szabályozási kör visszacsatoló ágában szintén egységnyi átviteli tulajdonságot feltételezve vizsgáljuk az egyszerűsített másodrendű rendszert.
A visszacsatoló ágban lévő egységnyi átvitel megfelelően közelíti az egyébként szabályozási körökben használatos érzékelő és jelátalakító dinamikai tulajdonságait.
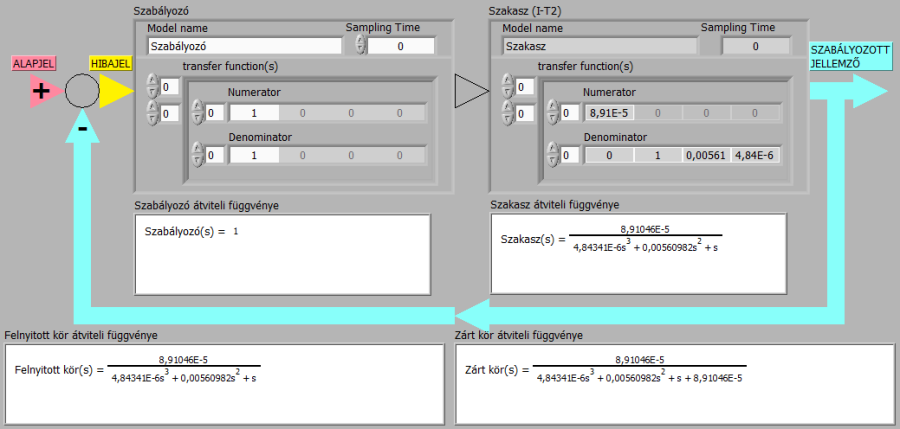
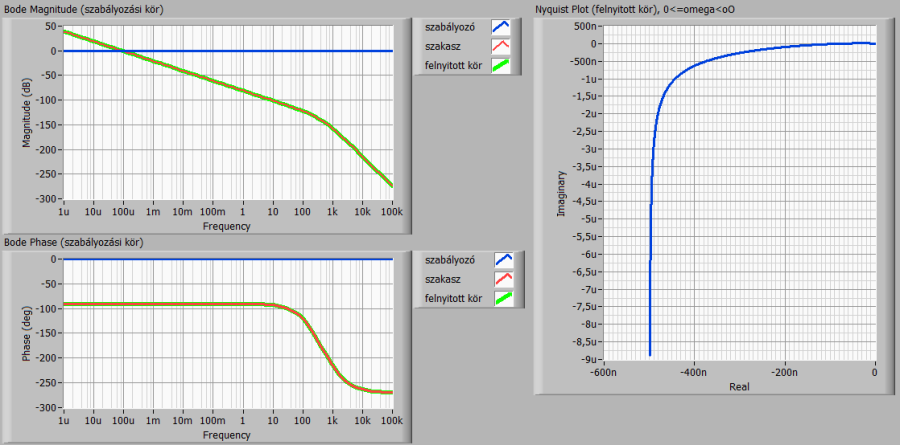
A szabályozás minőségét a tartalékok (fázis- és erősítési tartalék), a zárt kör átmeneti függvénye, valamint a szakasz és a zárt pólusaival értékelhetjük.
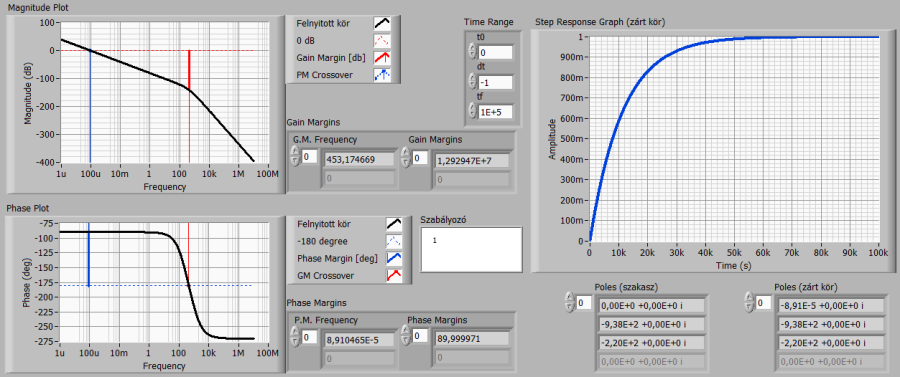
A kapott eredményekből – főleg a zárt kör átmeneti függvényéből – látszik, hogy az egységnyi erősítésű P-szabályozóval
ugyan a kívánt aperiodikus beállást érjük el,
nincs maradó követési hiba a szakasz melletti (a sebesség-elmozdulás konverzió miatt szükséges) integrálás miatt, azonban
a szabályozás rendkívül lassú!
Az arányos szabályozó erősítését növelve a vágási körfrekvencia jobbra tolódik, a zárt kör gyorsul. 100-szoros erősítésű arányos szabályozót választva az eredmény az alábbi ábrán látható.
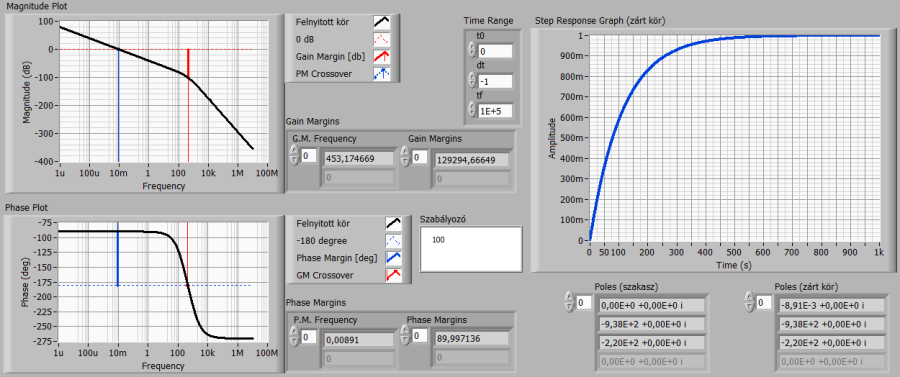
Az elméleti – pontosabban szimulációs – vizsgálódást folytatva, az arányos szabályozó erősítését 10000-re választva tovább gyorsíthatjuk a rendszert. Az alábbi ábrán látható, hogy a szakasz másodrendű részének dinamikáját még mindig nem tudtuk eléggé megközelíteni.
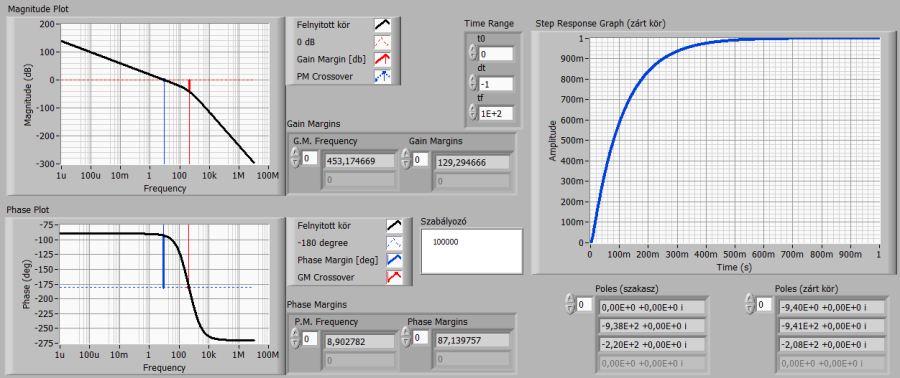
Próbálkozzunk az erősítés további növelésével! AZ előző érték 20-szorosát, vagyis 2000000-szoros erősítést választva még mindig nem értük el a szakasz gyorsaságát, viszont a rendszerünk lengő beállást mutat. Az erősítés további növelése fokozza a lengési hajlamot. A golyósorsós pozícionáló esetében lengéseket semmiképpen nem engedhetünk meg, így a legegyszerűbb arányos szabályozónál összetettebb struktúrára lesz szükségünk.
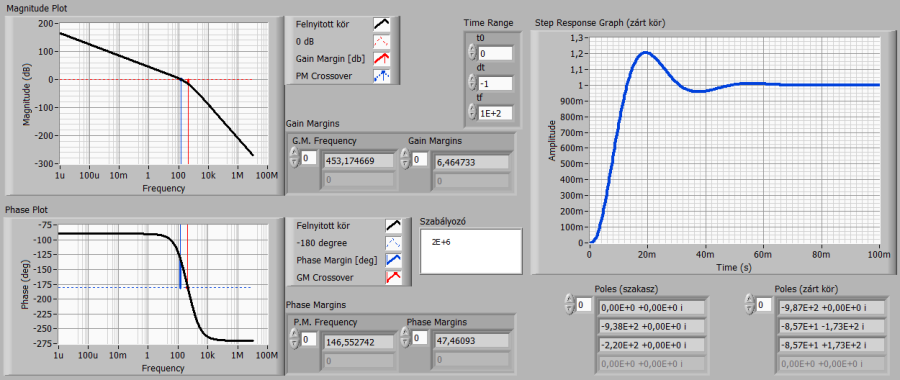
Válasszunk PD-jellegű töréspontáthelyező algoritmust (azaz párhuzamosan kapcsolt arányos és megvalósítható differenciáló tulajdonságú tagból álló szabályozót)!
|
|
(16.28) |
A szabályozó (1+TAs) gyöktényezőjével „semlegesítjük” a szakasz kisebb törésponti körfrekvenciájú (vagyis nagyobb időállandójú) elsőrendű komponensét. A TB időállandó reciprokának megfelelő töréspontot és az Ac erősítést úgy választjuk meg, hogy a zárt kör továbbra is aperiodikusan követi az egységugrás alapjelet és gyorsasága legyen összemérhető a szakasz integrálás nélküli, másodrendűként közelített részével.
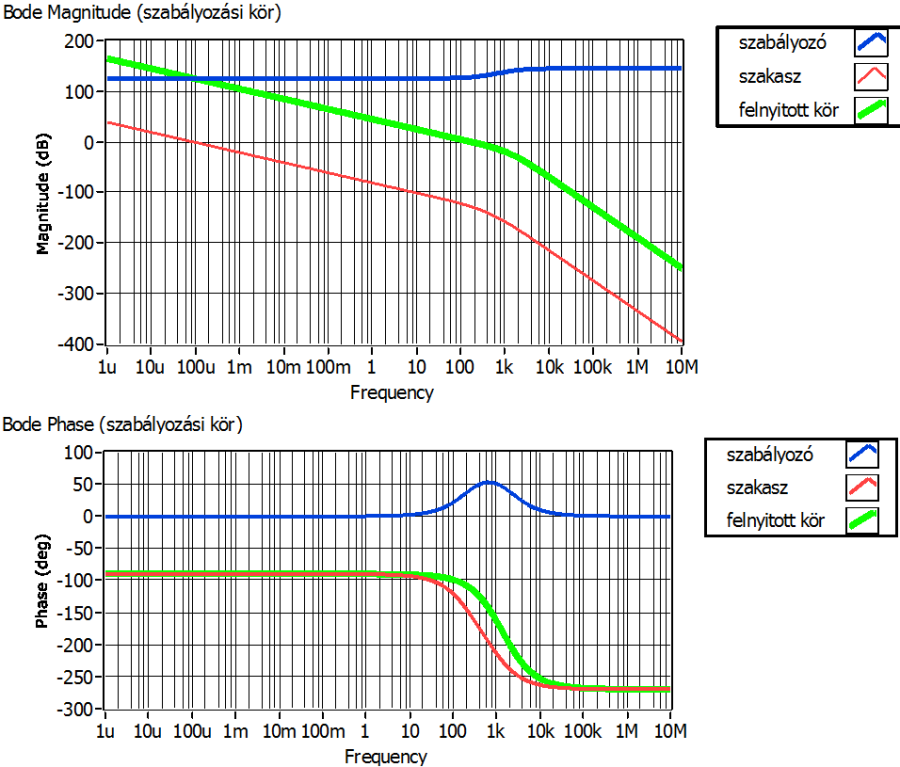
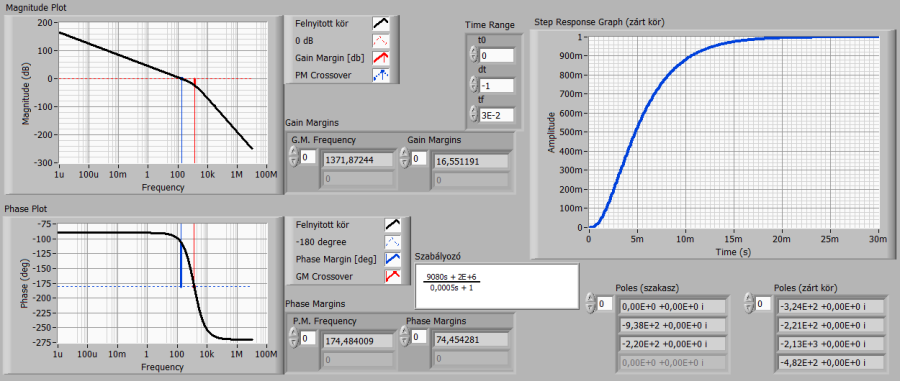
A PD-jellegű töréspontáthelyező további hangolásával (erősítés növelése, töréspont további jobbra mozgatása) elérhetjük a szabályozó lehetőségeinek határát. Ekkor célszerű olyan PID-jellegű struktúrát választani, amiben nincs soros integráló hatás, hiszen az a szakaszban már van. Így a szakasz másodrendűen közelített részében lévő pólusok áthelyezését biztosító szabályozó struktúrát választunk.
A választott PID-jellegű struktúra a kettős töréspontáthelyező algoritmus. A szakasz két töréspontját (pólusát) a szabályozó két (a TA és TC időállandónak megfelelő) zérusa kompenzálja, az előírt dinamikai tulajdonságokat biztosító felnyitott szabályozási körbeli gyököket pedig a szabályozó (TB és TD időállandónak megfelelő) zérusai adják. Az AC erősítési tényezővel biztosíthatjuk, hogy a vágási körfrekvencia az előírt stabilitási és gyorsasági feltételeket biztosítsa. A szakaszban lévő integráló tulajdonság miatt az ugrásszerű alapjelet a szabályozás mindenképpen hiba nélkül követi.
|
|
(16.29) |
A szakasz (egyszerűsített) átviteli függvény két elsőrendű és egy integráló tag soros eredőjeként felírva
|
|
(16.30) |
A felnyitott kör átviteli függvénye a szabályozó Gc(s) és a szakasz Gs(s) átviteli függvényének soros eredője (szorzata)
|
|
(16.31) |

Először vizsgáljuk meg a szakasz T1 és T2 időállandójának megfelelő pólust közömbösítő, nem megvalósítható szabályozó átviteli függvényt.
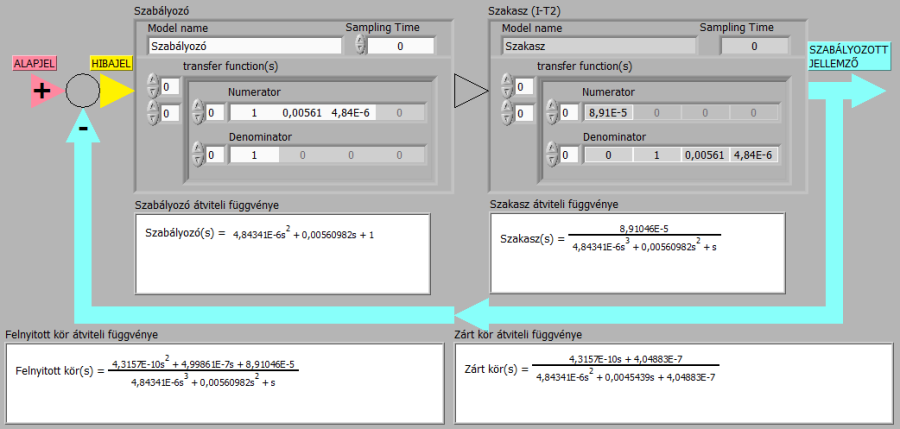
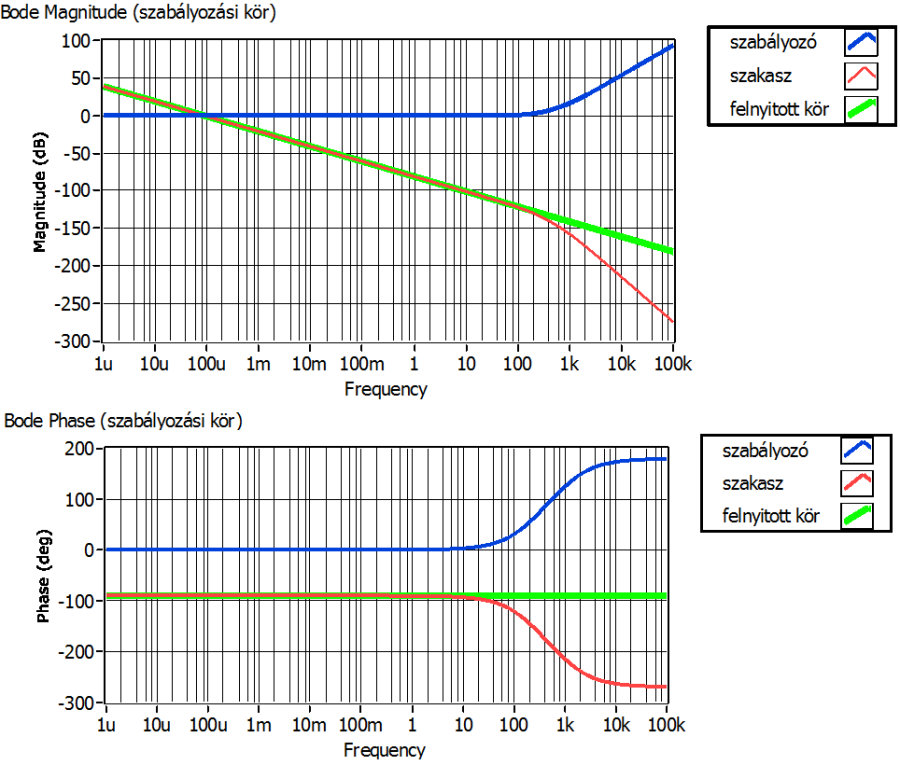
Ezzel a – hangsúlyozottan nem megvalósítható – szabályozóval a felnyitott kör integráló, a zárt kör egytárolós arányos jellegű. A zárt kör előírt dinamikáját biztosító – a vágási körfrekvencia reciprokaként értelmezhető – zárt kör időállandót a szabályozó megfelelő értékű erősítésével lehetne beállítani.
A szabályozó megvalósíthatóságához elengedhetetlen, hogy átviteli függvényében a számláló polinom fokszáma ne legyen alacsonyabb a nevező polinom fokszámánál. Ha az előző ábrákon látható módon a szabályozó zérusaival semlegesítjük a szakasz nullától különböző pólusait, a szabályozó pólusaival definiálhatjuk a felnyitott kör és természetesen ezen keresztül a kör zárt pólusait.
A szakasz integráló jellegét figyelembe véve úgy kell a pólusokat áthelyeznünk, hogy az előírt gyorsaságot biztosító vágási körfrekvenciától elegendően messze jobbra essenek a felnyitott kör töréspontjai a Bode-diagramon.
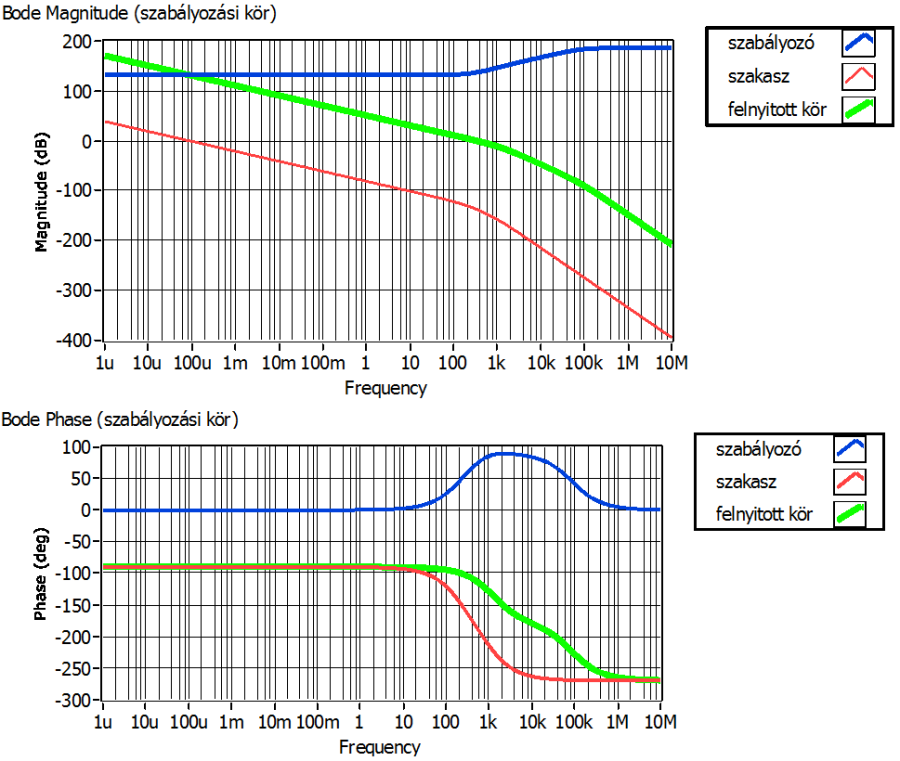
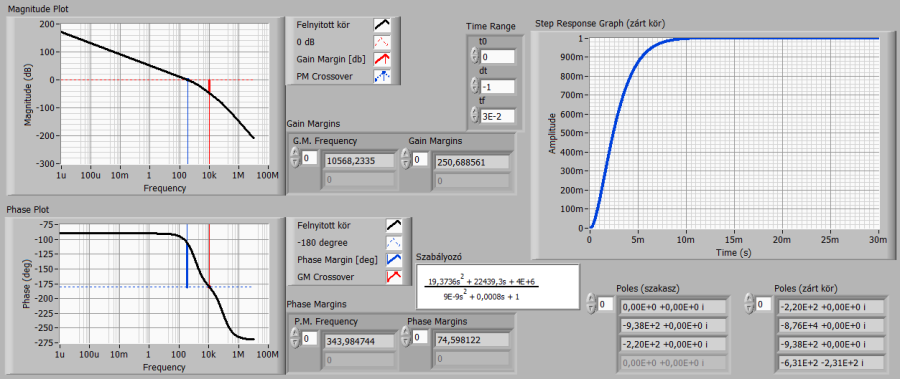
A szabályozó paramétereit folyamatosan változtatva és futtatva a szimulációs programot tovább tudjuk alakítani a zárt kör válaszát, hogy a célul kitűzött zárt rendszer dinamikai sajátságokat elérhessük.
Szakirodalom
[16.1.] LabVIEW 2009 Help http://www.ni.com/pdf/manuals/371361f.zip.
[16.2.] LabVIEW Control Design User Manual, June 2009 http://www.ni.com/pdf/manuals/371057g.pdf.
[16.3.] LabVIEW 2009 Control Design and Simulation Module Help http://www.ni.com/pdf/manuals/371894d.zip.
[16.4.] Maxima, a Computer Algebra System: Documentation http://maxima.sourceforge.net/documentation.html.
[16.5.] COMA, Control Engineering with Maxima és Regelungstechnik mit Maxima http://www.austromath.at/daten/maxima/zusatz/Control_Engineering_with_Maxima.pdf.
17. fejezet - Vonóelemes pozícionáló szabályozásának tervezése és szimulációja
A 10. fejezet fejezetben szereplő vonóelemes mozgásátalakító matematikai modell struktúrájának előállítására mutatunk egyet a lehetséges módszerek közül.
A matematikai modell (átviteli függvény) paraméterezéséhez katalógusból válogatott adatokat használunk.
A matematikai modellel adott rendszer dinamikai (idő- és frekvenciatartománybeli) vizsgálata után szabályozót tervezünk, az ilyen jellegű valóságos rendszerekkel szemben támasztott irányítási célok figyelembe vételével. Elsődleges elvárás természetesen a stabilitás, mégpedig aperiodikus viselkedéssel, túllendülések nélküli, gyors és pontos (hibamentes) alapjel követéssel.
A megoldásban bemutatunk az egyszerűsített linearizált vonóelemes átalakító mellett egy a valóságot jobban tükröző nemlineáris struktúrát. A linearizált modellhez „hagyományos” (PID struktúrájú), a nemlineárishoz pedig állapotvisszacsatolásos szabályozást tervezünk.
17.1. Matematikai modell előállítása
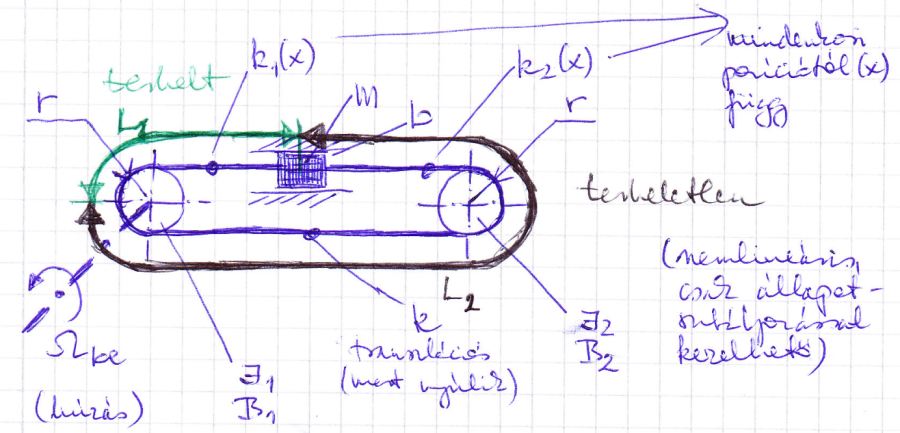
A rendszer működését ábrázoló „műszaki vázlat” alapján elkészíthetjük a struktúragráfot. A DC-motorból, hajtóműből, rugalmas tengelykapcsolóból, valamint a vonóelemes mozgatóból (két tárcsa, szíj és mozgatott tömeg) álló rendszer struktúragráfja az alábbi ábrán látható.

Az ábrákon (és a további modellekben) szereplő fizikai mennyiségek:
|
u |
[V] |
feszültség | |
|
R |
[Ω] |
ellenállás | |
|
L |
[H=Vs/A] |
induktivitás | |
|
nv1=KM |
[Nm/A=Vs/rad]] |
az elektrodinamikai energiaátalakító (váltó) ún. motorállandója | |
|
Ω |
[rad/s] |
szögsebesség (m index a motorra, 0 a hajtómű kimenetére, 1 index a motorral hajtott (r [m] sugarú) szíjtárcsára, 2 index a vonóelemmel mozgatott (szintén r [m] sugarú) szíjtárcsára vonatkozik) | |
|
J |
[kg m2] |
tehetetlenségi nyomaték (a szögsebességhez hasonló indexeléssel) | |
|
B |
[Ns/rad] |
transzlációs mechanikai rendszerben értelmezett csillapítási tényező (a szögsebességhez és a tehetetlenségi nyomatékhoz hasonló indexeléssel) | |
|
nt = i |
a hajtómű mint energiaátalakító (transzformátor) állandója (módosítás) | ||
|
Kt |
[Nm/rad] |
a tengelykapcsoló torziós rugómerevsége | |
|
nv2=r |
[m] |
a forgó és haladó mozgás közötti energiaátalakító (váltó) állandója, a szíjtárcsa sugara | |
|
m |
[kg] |
a szíjjal mozgatott tömeg | |
|
b |
[Ns/m] | ||
|
k |
[N/m] |
a szíj alsó részében a megnyúlás miatt értelmezhető transzlációs rugómerevség | |
|
k1 |
[N/m] |
a vonóelem (bordásszíj) húzott ágában értelmezett, az elmozdulástól függő transzlációs rugómerevség | |
|
k2 |
[N/m] |
a vonóelem (bordásszíj) húzott ágában értelmezett, az elmozdulástól függő transzlációs rugómerevség | |
|
nv3=1/r |
[1/m] |
a haladó és forgó mozgás közötti energiaátalakító (váltó) állandója | |
|
L1 |
[m] |
a terhelt szíjhossz | |
|
L2 |
[m] |
a terheletlen szíjhossz |
Ugyan már a vázlatban is alkalmaztunk elhanyagolásokat (például a tengelykapcsolóban fellépő súrlódási veszteséget elhanyagoljuk, BH → 0), de modellünk még mindig igen összetett. Az energiatárolók száma a struktúragráf alapján, egyelőre összevonások nélkül: egy villamos (L), egy torziós rugalmas (K), négy torziós tehetetlenség (J), egy transzlációs mechanikai (m), valamint három transzlációs rugalmas (k). Utóbbiak közül kettő nemlineárisként modellezett. Összesen tíz energiatárolót számolhatunk össze, így gyakorlatilag analitikus módszerekkel kezelhetetlen magasabb rendű rendszermodellt kapunk.
17.2. Egyszerűsített modell
Az összevonható mennyiségek és az egyes részegységek sajátságai figyelembe vételével egyszerűsíthetjük a gráfot.
a DC motor induktivitása mint energiatároló a rendszerben lévő többi tárolóhoz képest gyors dinamikájú (nagyságrendekkel kisebb időállandójú), ezért elhanyagoljuk
a transzlációs rugalmasságokat a 10. fejezet fejezetben ismertetett egyszerűsítéssel linearizáljuk és összevonjuk
|
|
(17.1) |
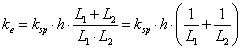
ahol kSP [N/mm] a vonóelem (szíj) egy milliméter szélességére vonatkoztatott specifikus rugómerevség, h [mm] a vonóelem szélessége, L1 [mm] a húzott (terhelt) ág hossza, L2 [mm] a terheletlen ág hossza

További egyszerűsítést tesz lehetővé a megfelelően kicsi tehetetlenségű nyomatékú szíjtárcsák választása, így a 2 indexű szíjtárcsát elhagyhatjuk a gráfból. Hasonló megfontolás alapján a hajtott (1 indexű) szíjtárcsát szintén elhanyagolhatjuk.
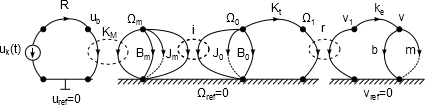
A következő lépésben transzlációssá alakítjuk a motort követő rotációs mechanikai részrendszert, így a struktúragráf a DC-motor és hajtómű egységre (hajtó részrendszer) és a transzlációs mechanikai rendszerként modellezett vonóelemes egységre (hajtott részrendszer) választható szét, amennyiben a hajtómű módosítása kellően nagy.
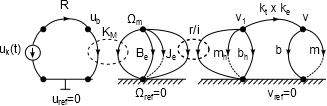
17.2.1. A hajtó részrendszer modellje
A motor-hajtómű egység működését hálózati módszerrel írjuk fel, ehhez az időtartománybeli jeleket átírjuk Laplace-operátoros tartományba.
Az elektrodinamikai energiaátalakító (váltó) egyenletei
|
|
(17.2) | |
|
|
(17.3) |
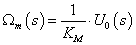

A villamos részre felírható hurokegyenlet
|
|
(17.4) |
Az ellenállásra eső feszültség egyenletét és a megfelelő (indukált feszültség – szögsebesség kapcsolatot megadó) váltóegyenletet behelyettesítve
|
|
(17.5) |

A forgó mechanikai részre csomóponti egyenletet írunk fel, ahol Mv a másik váltóegyenlettel meghatározott „villamos” nyomaték, Mt a terhelésből származó nyomaték
|
|
(17.6) |

Behelyettesítve
|
|
(17.7) |

Laplace-transzformálva
|
|
(17.8) |

Mátrixegyenletként felírva
|
|
(17.9) |

Mivel a rendszer visszahatásmentes, Mt=0. Ezt szem előtt tartva például Cramer-szabállyal fejezhetjük ki Ωm értékét, majd a körfrekvencia és feszültség között felírható átviteli függvényt
|
|
(17.10) |
A motor-hajtómű rendszer átviteli függvénye
|
|
(17.11) |
A szögsebesség és sebesség közötti kapcsolat
|
|
(17.12) |
A vonóelemes mozgató hajtott szíjtárcsájára értelmezett transzlációs sebesség és a motorra kapcsolt feszültség közötti átviteli függvény egytárolós arányos jellegű
|
|
(17.13) |
A hajtó részrendszerre vonatkozó katalógusadatok és az azokból számított, a szimulációs modellhez szükséges erősítési tényező és időállandó
|
Elektromechanikus energiaátalakító (váltó) állandója |
KM = 8,64⋅10-3 (N⋅m)/A |
|
Motor ellenállása |
R = 24 Ω |
|
Hajtómű módosítása |
i = 76 |
|
A motor és hajtómű tehetetlenségi nyomatéka |
Je = 5,9⋅10-8 kg⋅m2 |
|
A motor és hajtómű csillapítási tényezője |
Be = 1,1⋅10-6 (N⋅m⋅s)/rad |
|
A szíjtárcsa sugara |
r = 4,82⋅10-3 m |
|
| ||
|
| ||
|
|
(17.14) |
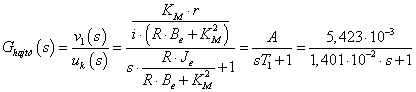
17.2.2. A hajtott részrendszer modellje
A hajtott részrendszer modellezése során a hajtó rendszert keresztváltozó (sebesség) forrással helyettesítjük, ezért az azzal párhuzamosan kapcsolt rotációsból transzlációsba redukált tömeget és csillapítást elhagyhatjuk, mert erre a két elemre rákényszerítjük a forrás előírt értékét.
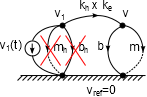
A sorba kapcsolt forgóból transzlációsba redukált tengelykapcsoló és az egyszerűsített vonóelem rugalmasság eredőjét jelöljük kr-rel. A sorosan kapcsolt rugók eredőjét reciprokok összegével számíthatjuk, jelen esetben két rugó eredőjénél az „x”-el jelölt „replusz” módszerrel számíthatjuk
|
|
(17.15) |
Csomóponti egyenletet felírva határozzuk meg az átviteli függvényt
|
|
(17.16) |
Kifejtve
|
|
(17.17) |

Laplace-transzformálva és átrendezve
|
|
(17.18) |

A hajtott rendszer másodrendű, átviteli függvénye
|
|
(17.19) |

A hajtott részrendszerre vonatkozó katalógusadatok és az azokból számított, a szimulációs modellhez szükséges erősítési tényező és időállandó
|
A terhelt szíjhossz |
L1 = 0,15 m |
|
A terheletlen szíjhossz |
L2 = 3⋅L1+2⋅r⋅π = 0,48 m |
|
A szíj szélessége |
h = 6 mm |
|
A szíj specifikus rugómerevsége |
ksp = 9155 N/mm |
|
A szíjtárcsa sugara |
r = 4,82⋅10-3 m |
|
A tengelykapcsoló torziós rugómerevsége |
Kt = 23 (N⋅cm)/rad |
|
A mozgatott tömeg |
m = 0,1 kg |
|
A mozgatott tömeghez kapcsolt csillapítás |
b = 5⋅10-3 (N⋅s)/m |
|
| ||
|
| ||
|
| ||
|
| ||
|
| ||
|
|
(17.20) |




A modellben szándékosan választottunk a fogazott szíj esetében olyan valósághoz közeli értékű rugómerevséget, ami az adott mozgatott tömeggel jól érzékelhető rezonanciát eredményez. A szabályozás egyik célja éppen ennek a rezonancia-hajlamnak a megszűntetése.
17.2.3. A teljes rendszer átviteli függvénye
A rendszer átviteli függvénye a hajtó és a hajtott részrendszer soros eredője kiegészítve egy integrátorral, hiszen eddig a mozgatott rendszer sebességével számoltunk, de valójában az elmozdulásra vagyunk kíváncsiak, pozíciószabályozásról lévén szó.
|
|
(17.21) |

A LabVIEW 2009-ben készített szimulációs modellhez ismét a paraméteres átviteli függvény megadást választjuk. Az átviteli függvény együtthatók esetenként igen bonyolult összefüggését nem kézzel, hanem a Maxima programmal számoljuk. A Maxima által „számított” kifejezéseket egyszerűen kijelölve, majd a vágólapra másolva a LabVIEW megfelelő mezőibe illeszthető kifejezéseket kapunk, ahogyan ez az alábbi ábrán is látható (itt a Jegyzettömb programba illesztettük a másolt wxMaxima eredményeket). A pi kifejezést helyettesítjük π=3,14159265359 tetszőleges pontosságú értékével.
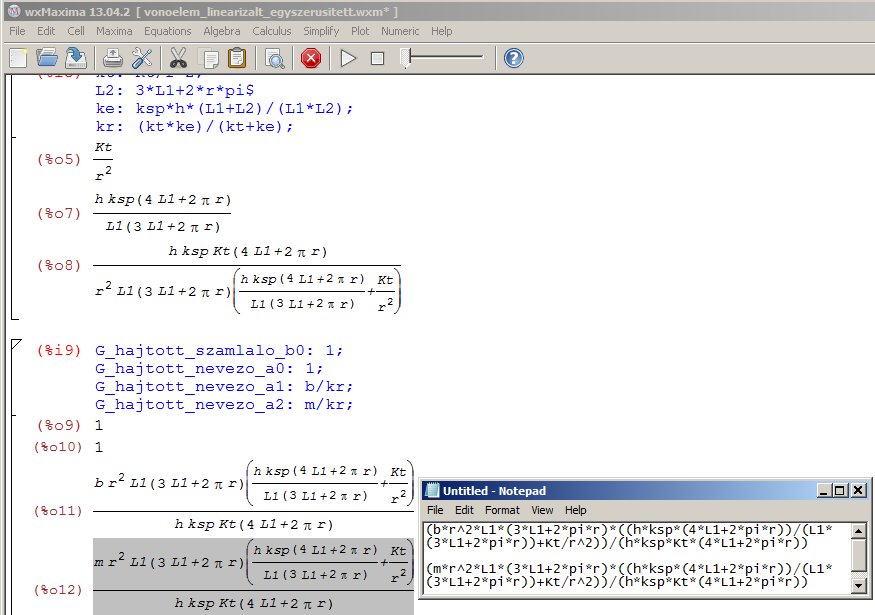
A képleteket és a paraméterek értékét bemásolva LabVIEW programunkba megkapjuk a szabályozó tervezéséhez szükséges szakasz átviteli függvényt. Célszerű a sebesség-pozíció konverzióhoz szükséges integrálást egyelőre kihagyni az átviteli függvényből. LabVIEW-ban egyszerűen ábrázolhatjuk a jellegzetes időtartománybeli válaszokat (a súlyfüggvényt és az átmeneti függvényt), a pólus-zérus térképet és a pólusok értékét, valamint frekvenciatartománybeli jellemző diagramokat (Bode és Nyquist).
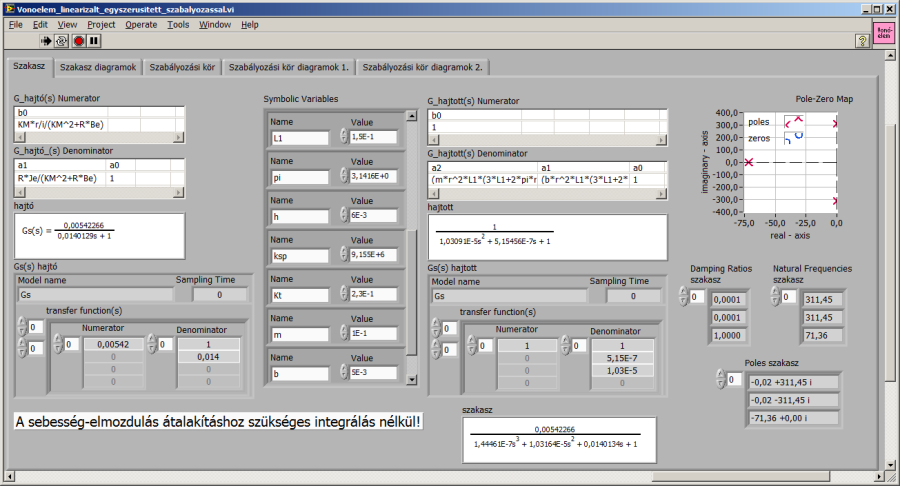
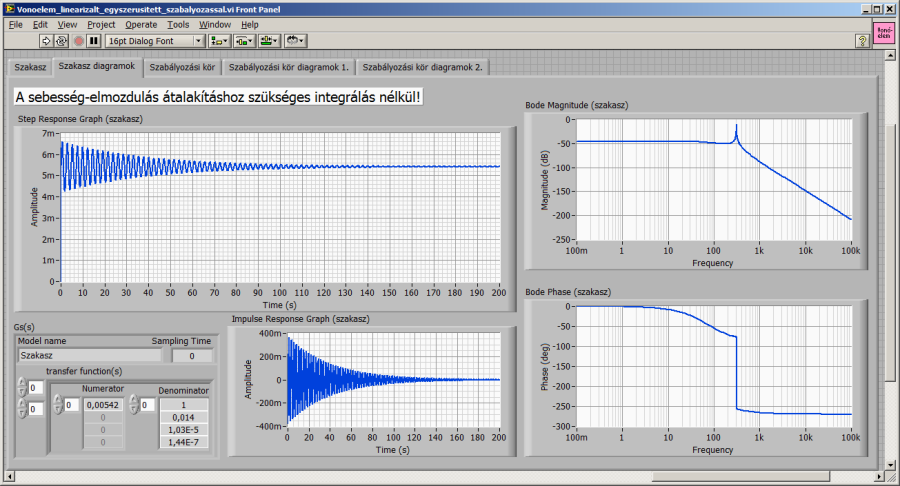
Az átmeneti függvényből és a póluseloszlásból egyértelműen látszik, hogy a harmadrendű rendszer erősen lengő, a feladatnak nem felel meg dinamikai viselkedése (ld. fentebb). Vonóelemes mozgatásnál aperiodikus, gyors és pontos beállást várunk.
17.2.4. Szabályozó tervezés
Először megvizsgáljuk a – most már integráló tulajdonsággal kiegészített – szakasz viselkedését a negatív visszacsatolású „szabályozási” körben, szabályozó nélkül.
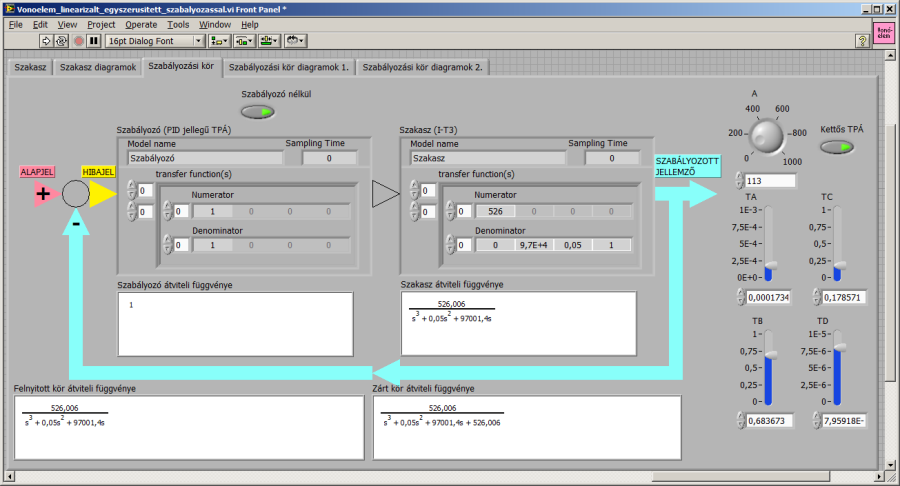
Ha a szabályozót elhagyjuk (egységnyi átviteli tulajdonsággal helyettesítjük), a szakasz és a felnyitott kör átviteli függvénye megegyezik, így egybeesik Bode diagramjuk is.
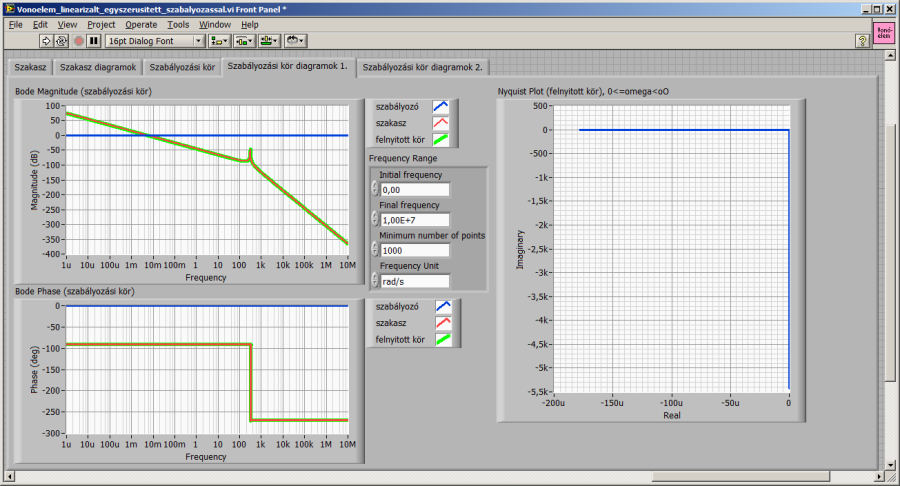
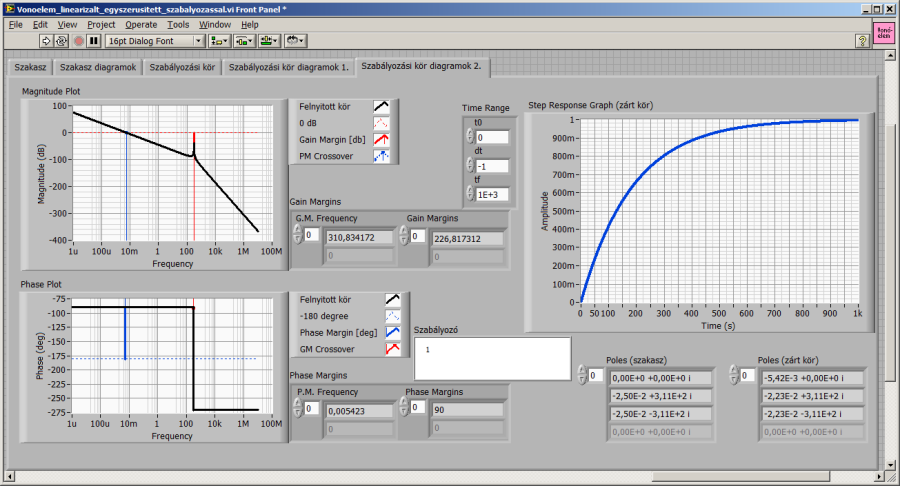
Már a fázistartalék értéke alapján is sejthetjük, az átmeneti függvény pedig bizonyítja, hogy az erősen lengő szakaszt aperiodikus beállásúra változtatta a negatív visszacsatolás, azonban a „szabályozott” rendszer igencsak lelassult. A (17.9. ábra) ábrán a szakasz átmeneti függvénye 320 időegységnél „fejeződik be”, a LabVIEW CD Step response.vi automatikusan állította be az ábrázolás határát. Ugyanezzel a megoldással az egységnyi arányos szabályozóval kiegészített szakasz átmeneti függvényét kb. 1500 időegységig ábrázolja a program (17.12. ábra).
Célszerű soros integráló hatás nélküli PID-jellegű szabályozó struktúrát választani, hiszen az a szakaszban már van. Így a szakasz másodrendű lengő részében (a stabilitás szempontjából meghatározó domináns póluspárnál) helyezzük el a pólusokat áthelyező szabályozót.
A választott PID-jellegű struktúra a kettős töréspontáthelyező algoritmus. A szakasz két töréspontját (pólusát) a szabályozó két (a TA és TC időállandónak megfelelő) zérusa kompenzálja, az előírt dinamikai tulajdonságokat biztosító felnyitott szabályozási körbeli gyököket pedig a szabályozó (TB és TD időállandónak megfelelő) zérusai adják. Az Ac erősítési tényezővel biztosíthatjuk, hogy a vágási körfrekvencia az előírt stabilitási és gyorsasági feltételeket biztosítsa. A szakaszban lévő integráló tulajdonság miatt az ugrásszerű alapjelet a szabályozás mindenképpen hiba nélkül követi.
|
|
(17.22) |
A szakasz (egyszerűsített) átviteli függvény egy elsőrendű és egy lengő másodrendű, valamint a sebesség-pozíció átalakítás miatti integráló tag soros eredőjeként felírva
|
|
(17.23) |

Az alábbiakban a szabályozó egy lehetséges beállítását látjuk. A zárt kör aperiodikus jellegű, zérus maradó hibát eredményező átmeneti függvénye a szabályozó nélküli állapotnál jelentősen gyorsabb.
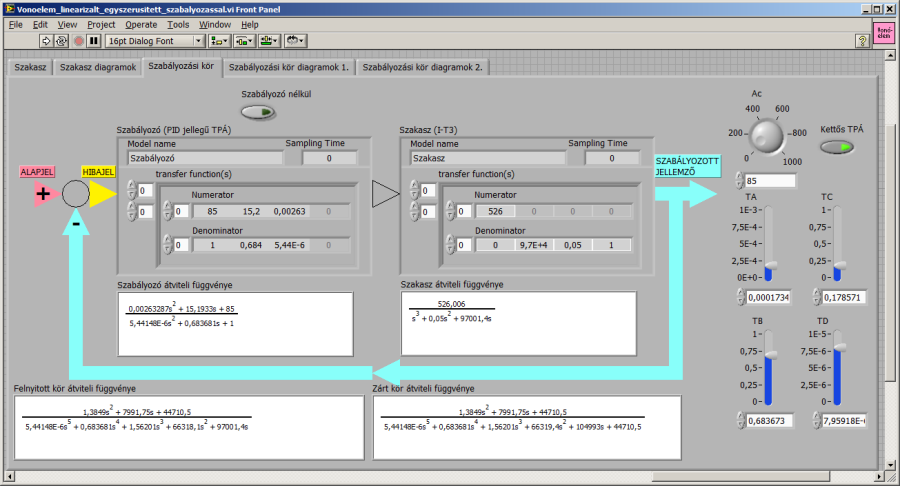
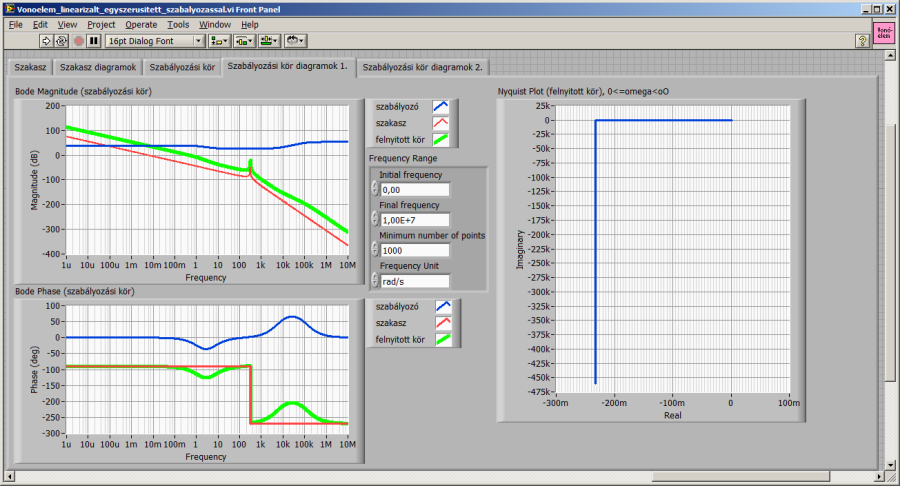
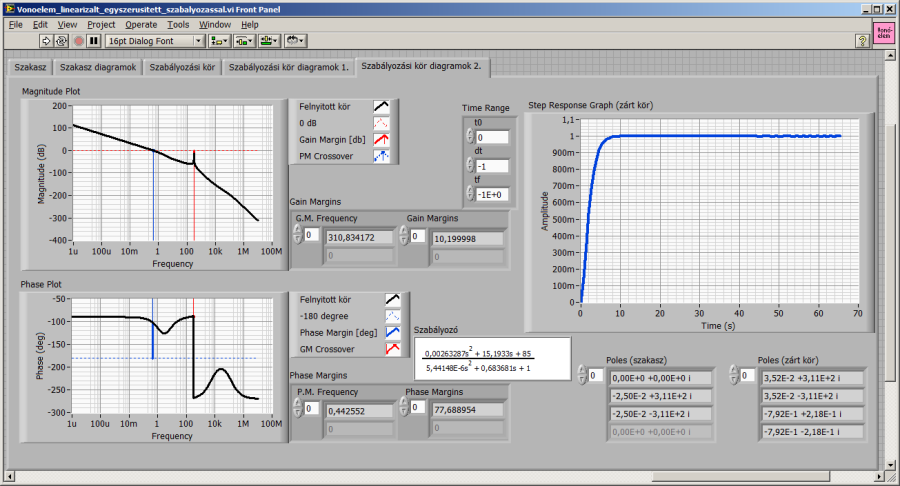
Az igényeknek megfelelően tovább változtathatjuk a szabályozó öt paraméterét, természetesen a szabályozáselméletben megismert elveket szem előtt tartva.
17.3. Teljes nemlineáris modell
A szíj pozíciótól függő rugalmasságát a 12. fejezet fejezetben ismertetett elvek alapján vesszük figyelembe. A megfelelően átalakított struktúragráf az alábbiakban látható.

A korábbi megfontolásokhoz hasonlóan állítjuk elő – továbbra is visszahatásmentes hajtóművet feltételezve – a motor-hajtómű („mh”) részrendszer modelljét. Most nem a hajtott tárcsa v1 kerületi sebessége és a motorra kapcsolt uk feszültség közötti átviteli függvényt írjuk fel, a transzlációs v1 sebesség helyett az Ω1 szögsebességet használjuk.
|
|
(17.24) |

A hajtott tárcsa szögsebességét, tehetetlenségi nyomatékát és torziós csillapítását szintén a korábbi megfontolások alapján a transzlációs rendszerbe redukáljuk. Ezzel az igen egyszerűsített struktúragráf az alábbiak szerint alakul.
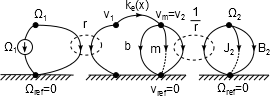
Mivel vizsgálatunkban nem a „2” indexű tárcsa szögsebességére vagyunk kíváncsiak, hanem a mozgatott tömeg vm sebességére, a forgó rendszert a már ismert elvek alapján redukáljuk. Így be kell vezetnünk az me eredő tömeget és a be eredő csillapítást az alábbiak szerint
|
|
(17.25) |

Ha elhanyagolható a tárcsa tehetetlenségi nyomatéka és csillapítása, az eredő tömeg a mozgatott tömeggel, az eredő csillapítás pedig a mozgatott tömeg súrlódásából adódó csillapítással egyezik meg.
A pozíciótól függő rugalmasság összefüggése a 12. fejezet fejezetben szereplő megfontolások alapján, xmax-al jelölve a teljes mozgatási hosszat, xm-mel a tömeg méterben mért pozícióját
|
|
(17.26) |
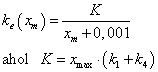
17.3.1. A nemlineáris állapottér modell előállítása
A redukált tömeggel és csillapítással felrajzolt struktúragráf és a motor-hajtómű részrendszer átviteli függvénye alapján felírhatjuk a rendszer állapottér modelljét.
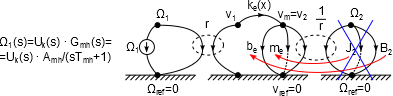
A vm csomópontra
|
|
(17.27) |

Az egyes erők
|
|
(17.28) |
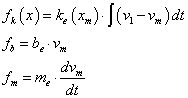
A hajtott tárcsa szögsebességére és kerületi sebességére vonatkozó összefüggés
|
|
(17.29) |

A motor-hajtómű rendszer átviteli függvényéből felírt differenciálegyenlet
|
|
(17.30) |
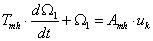
A mozgatott tömeg pozíciója sebességével kifejezve
|
|
(17.31) |

Válasszuk az állapotváltozók vektorát az alábbiak szerint
|
|
(17.32) |

Az állapottér modell főegyenlete
|
|
(17.33) |
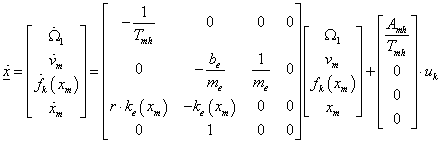
Az állapottér modell segédegyenletéből csak a tömeg elmozdulására vonatkozó részre van szükségünk
|
|
(17.34) |
A 12. fejezet fejezetben szereplő adatokkal számíthatjuk az állapottér modell főegyenletében lévő rendszermátrixot és bemeneti vektort.
|
Elektromechanikus energiaátalakító (váltó) állandója |
KM = 5·10-2 (N⋅m)/A |
|
Motor ellenállása |
R = 15 Ω |
|
Motor induktivitása elhanyagolható |
L → 0 |
|
Hajtómű módosítása |
i = 1500 |
|
A motor és hajtómű tehetetlenségi nyomatéka |
Je = 2,33⋅10-5 kg⋅m2 |
|
A motor és hajtómű csillapítási tényezője |
Be = 10-3 (N⋅m⋅s)/rad |
|
A tengelykapcsoló torziós rugómerevsége elhanyagolható |
Kt → ∞ |
|
A motor-hajtómű részrendszer számított erősítési tényezője |
Amh = 5,71·10-3 rad/(V⋅s) |
|
A motor-hajtómű részrendszer számított időállandója |
Tmh = 0,020 s |
Az erősítési tényező képlete
|
|
(17.35) |

Az időállandó képlete
|
|
(17.36) |

A hajtott részrendszer táblázatos adatai között feltüntetjük a négy jellegzetes hosszúságot (a terheletlen ághosszakat) és a hozzájuk tartozó rugómerevséget, valamint a pozíciótól függő rugómerevség összefüggésében szereplő K-val jelölt erő dimenziójú mennyiséget.
|
A tárcsák fogszáma |
z = 28 |
|
A tárcsák fogtávolsága |
p = 5 mm |
|
A tárcsák sugara a zp=2rπ kifejezésből |
r = zp/(2rπ) = 22,28 mm |
|
„Holt” szakasz |
x0=25 mm |
|
Mozgatási tartomány |
xmax=800 mm |
|
A szíj szélessége |
h = 10 mm |
|
A szíj specifikus rugómerevsége (a szíj szélesség 1 mm-ére és a szíj 1 mm hosszára) |
ksp = 7,7·103 N/mm |
|
A szíjtárcsa sugara |
r = 4,82⋅10-3 m |
|
A tengelykapcsoló torziós rugómerevsége elhanyagolható |
Kt → ∞ |
|
A mozgatott tömeg |
m = 2 kg |
|
Súrlódásból adódó csillapítási tényező (tapasztalati érték) |
b = 5⋅10-2 (N⋅s)/m |
|
L 1 = x max + x 0 + r·π/2 |
L1 = 860 mm |
|
L 2 = x 0 + rπ/2 |
L2 = 600 mm |
|
L 3 = x max + x 0 + 2(r·π/2) + 2·x0 + xmozg + r·π/2 |
L3 = 1780 mm |
|
L 4 = x 0 + 2(r·π/2) + 2x0 + xmax + r·π/2 |
L4 = 980 mm |
|
k 1 = k sp ·h·L 1 |
k1 = 90 N/mm |
|
k 2 = k sp ·h·L 2 |
k2 = 128 N/mm |
|
k 3 = k sp ·h·L 3 |
k3 = 43 N/mm |
|
k 4 = k sp ·h·L 4 |
k4 = 78 N/mm |
|
K= x max / (k 1 + k 4 ) |
K = 1,344·105 N |
A fenti adatokkal a nemlineáris állapottér modell egyenletei
|
|
(17.37) |
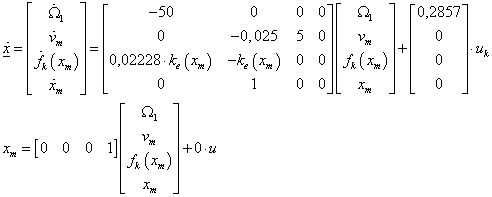
17.3.2. A linearizált állapottér modellel adott rendszer vizsgálata
Először a linearizált, pozíciótól nem függő rugómerevségű modellt elemezzük és tervezünk hozzá állapotvisszacsatolásos szabályozót. A linearizált rugómerevséget az L1 és L4 ághosszal számoljuk
|
|
(17.38) |
Ezzel a linearizált állapottér modell
|
|
(17.39) |
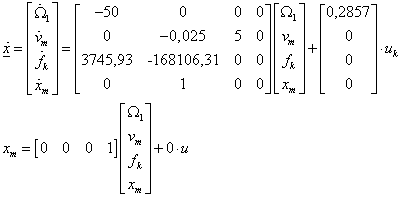
A LabVIEW-beli számítást megkönnyíti, ha a sebesség-pozíció miatt szükséges integrálást nem vonjuk be az állapottér modellbe. Mivel a szabályozandó rendszer integráló háromtárolós jellegű, a három tárolónak megfelelő pólusok áthelyezésével foglalkozunk. Az ezt biztosító állapotvisszacsatolásos kompenzációban így csak a három negatív valós részű pólussal (egy valós és egy konjugált komplex gyökpár) foglalkozunk. Az integráló hatásnak megfelelő nulla értékű pólust nem helyezzük át. Emiatt az állapottér modell kimenete a vm sebesség, amit sorba kapcsolva egy (egységnyi integrálási idejű) integráló taggal ugyanazt az eredményt kapjuk, mintha az integrálást bevonnánk az állapottér modellbe.
|
|
(17.40) |
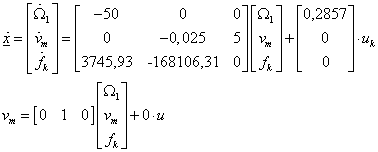
Az integrálás nélküli szakasz jellegzetességeit szintén a National Instruments LabVIEW 2009 és a Control Design and Simulation Module segítségével elemezzük.
Először meghatározzuk a szakasz pólusait és ábrázoljuk komplex számsíkbeli elhelyezkedésüket, valamint meghatározzuk a szakasz átmeneti függvényét. Az átmeneti függvény erősen lengő tulajdonságú, ami vonóelemes pozícionálásnál elfogadhatatlan.
Az integráló tulajdonsággal kiegészített harmadrendű szakaszmodellt felnyitott szabályozási körként kezelve előállítjuk a (szabályozó nélkül vagy egységnyi arányos szabályozóval ellátott) zárt szabályozási kör átmeneti függvényét és pólustérképét. A zárt kör ugyan aperiodikus jellegű és az integráló hatás miatt maradó hiba nélkül követi az egységugrás alapjelet, viszont meglehetősen lassú. (Az automatikusan skálázott átmeneti függvényt a szakasz esetén hozzávetőleg 700, a zárt körnél pedig 70k=70000 időegységig ábrázolja) a program.)
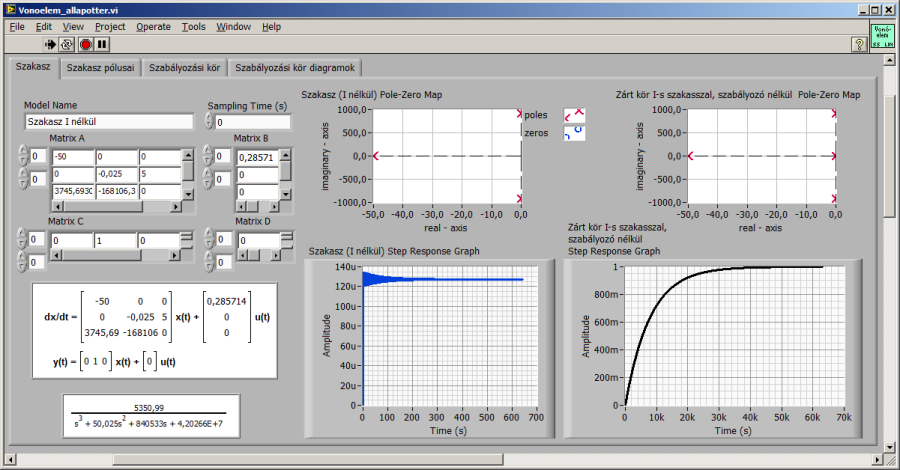
A LabVIEW program következő – Szakasz pólusai – lapján a vízszintes és függőleges csúszkákkal (vagy digitális kijelzőjükbe közvetlenül beírva a választott értéket) állíthatjuk be a szakasz kívánt pólusait. Kiszámítjuk az eredeti és a megadott pólusokhoz tartozó, egységnyi erősítésűként kezelt átviteli függvényeket és ábrázoljuk egységugrás gerjesztésre adott válaszukat, valamint Bode diagramjukat.
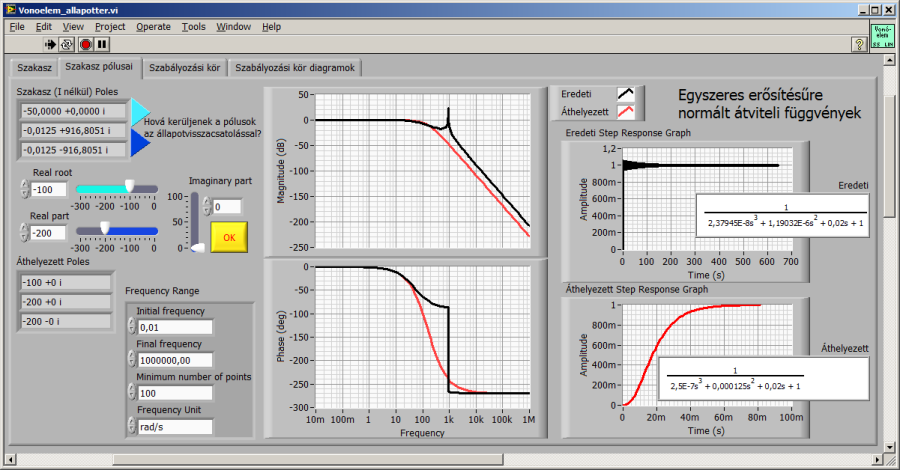
Az új pólusokat megfelelően megválasztva eltüntethetjük a lengő jelleget és gyorsíthatjuk a rendszert. Természetesen a szabályozási körben a sebességből pozícióra áttérést biztosító integrálást is figyelembe vesszük majd.
A választott pólusokat biztosító állapotvisszacsatolás K-val jelölt mátrixát a Control Design csomag CD Ackermann.vi blokkjával határozzuk meg. Az Ackermann-képletet alkalmazó számítás bemenete az eredeti (harmadrendű) állapottér modell és a választott pólusok vektora, kimenete pedig az állapotvisszacsatolás mátrixa. Az alábbi ábrán igencsak vázlatos az állapotvisszacsatolás ábrázolása, a pontos összefüggéshez a szakasz általános állapottér modelljét használjuk (ahol a bemenet közvetlenül nem hat a kimenetre).
|
|
(17.41) |

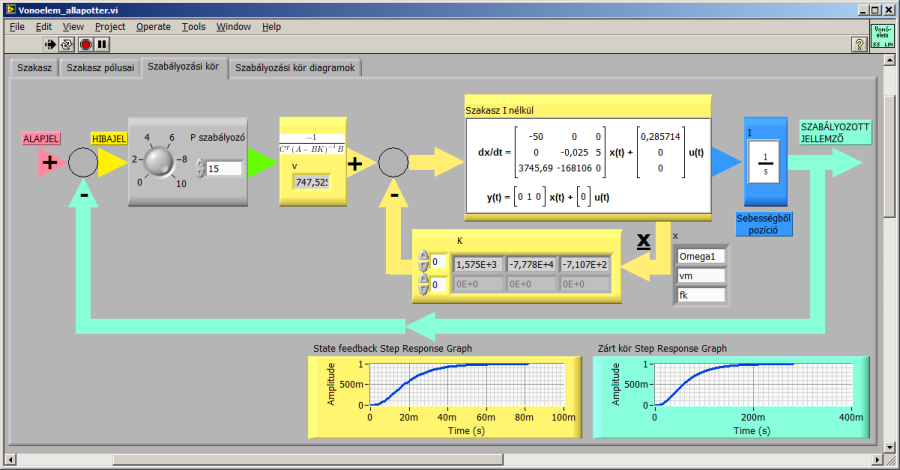
A pólusáthelyezést biztosító állapotvisszacsatolás a v szorzótényező és a K visszacsatoló mátrix segítségével írható fel.
|
|
(17.42) |

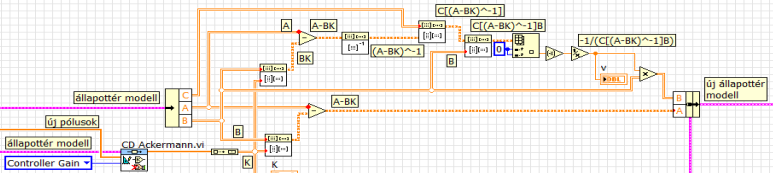
A pólusáthelyezéssel kapott harmadrendű tagot kiegészítjük a sebesség-pozíció konverzió integráló hatásával és egy arányos szabályozót is beiktatunk a körbe, hogy kevesebb „próbálgatással”, gyorsabban kapjunk megfelelő viselkedésű zárt kört. A P-szabályozó létjogosultságát alátámasztja, hogy az integráló tag egységnyi integrálási ideje a zárt kör dinamikai tulajdonságait számunkra kedvezőtlenül befolyásolja, a szabályozó erősítését tulajdonképpen az integrálási idő reciprokának tekinthetjük és ezzel a felnyitott kör Bode-diagramon jól követhető jellegét igényeink szerint alakíthatjuk. Természetesen az állapotvisszacsatolás egyedül is elegendő a szakasztulajdonságok hasonló zárt kör viselkedést eredményező befolyásolására, de komolyabb „fejben számolást” igényel a pólusok eloszlása és az igen könnyen kezelhető szemléletes Bode-diagram kapcsolatának feltérképezése .
A szakasz állapotvisszacsatolásával (és az arányos szabályozóval) megfelelő viselkedésű zárt kört érhetünk el.
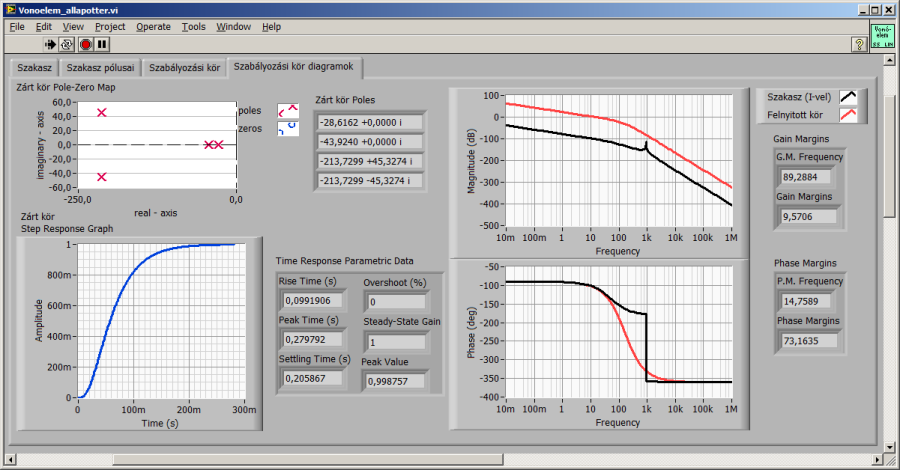
A Control & Simulation Loop struktúrában elhelyezett egységugrás jelgenerátorból, arányos szabályozóból, állapottér modellből és a különbségképzővel megvalósított egységnyi negatív visszacsatolásból álló hatásvázlatként adott modellünket szimulációs időlépésenként számítja a LabVIEW a választott differenciálegyenlet megoldóval (példánkban a Runge-Kutta 23-al).
A megoldás – ahogy az alábbi ábrán is látható – a Matlab Simulink nevű, valamint a Scilab Xcos grafikus modellezőjéhez hasonlít.
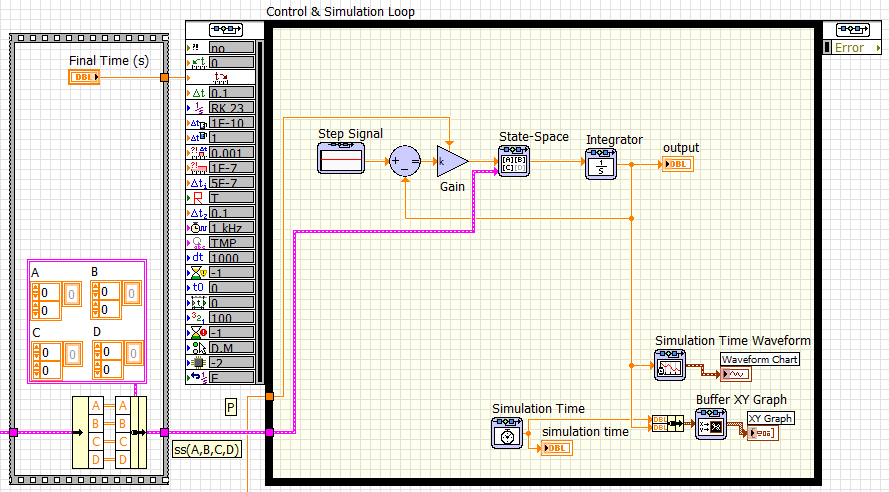
A LabVIEW-beli grafikus rendszermodell eredményei a megszokott módon XY grafikonban és az időlépésenként frissített Waveform Chart (hullámforma diagram) kijelzőn egyaránt ábrázolhatók.
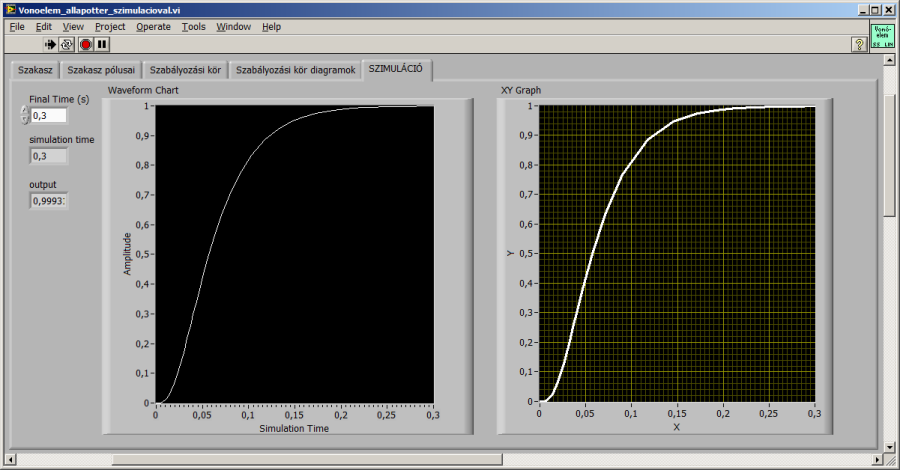
17.3.3. A nemlineáris állapottér modellel adott rendszer vizsgálata
A korábbi megfontolásoknak megfelelően a nemlineáris állapottér modellből elhagyjuk az xm elmozdulásra, mint állapotváltozóra vonatkozó egyenleteket.
|
|
(17.43) |
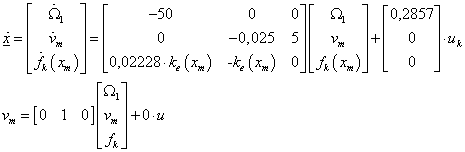
Az állapottér modell kimenetének választott vm elmozdulás integrálásával állítjuk elő az elmozdulást és ezt használjuk fel a rendszermátrix harmadik sorában szereplő elmozdulástól függő rugómerevség számításához. A korábban levezetett összefüggések alapján helyettesítve a rugómerevség kifejezését az állapottér modell mátrixai, pontosabban az (xm méterben adott elmozdulástól függő) A mátrix, a b oszlopvektor, a c sorvektor és a d skalár az alábbiak.
|
|
(17.44) |
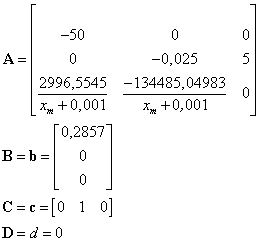
A szimuláció kezdetén az A mátrixba az xm=0 m kiindulási pozíciónak megfelelő értékeket helyettesítjük.
Az előzőleg bemutatott Control & Simulation Loop struktúrában készített lineáris állapottér modellel adott szakaszú szabályozási kör szimulációs modelljéhez hasonlóan vizsgáljuk a nemlineáris rendszert is. Különbséget jelent, hogy minden szimulációs időlépésben kiszámítjuk a rendszermátrix értékét az xm elmozdulás pillanatnyi értékének felhasználásával. Az így kialakult – A mátrixában változtatott – állapottér modellből és a szakasz előírt pólusaiból az Ackermann-formulával számoljuk az állapotvisszacsatolás A és B mátrixot módosító K mátrixát és v skalárját. A minden szimulációs lépésben kétszeresen módosított állapottér modell négy mátrixát vezetjük be a State-Space szimulációs blokkba. A blokk skalár kimenetét (a mozgatott tömeg vm sebességét) integrálva kapjuk a tömeg rendszermátrixot befolyásoló xm elmozdulását.
Az elmozdulás visszacsatolásánál nem keletezik algebrai hurok, mert szimulációs blokkal számított jel visszavezetéséről van szó. (Az algebrai hurok azt jelenti, hogy egy változó értékének kiszámításához magát a változót használjuk fel).
Az ÁTM(t) állapottér modell (rózsaszín, cluster adattípusú) változóba folyamatosan kiírjuk a mátrixok pillanatnyi értékét és ezt az azonos nevű (kék színű, picture típusú) kijelzőben is „kirajzoltatjuk”. Az ÁTM(t) cluster előző szimulációs lépésbeli értékére szükségünk van az A mátrix xm-től függő módosításához, megtartva a másik három mátrix (B, C és D) értékét. Amennyiben közvetlenül visszavezetnénk az Ackermann összefüggéssel módosított állapottér modellt az A mátrix újraszámításába, algebrai hurok miatt nem működne a programunk. Ennek kiküszöbölésére a Memory blokkot kell használnunk, mert ezzel egy szimulációs időlépéssel korábbi értéket használhatunk az azonos időpillanatbeli helyett a nem szimulációs blokkokal végzett számításban.
A szimuláció körülményei, a modellben használt paraméterek, a szakasz előírt pólusai, a P-szabályozó erősítése és a szimuláció időtartama megegyezik a lineáris rendszer vizsgálatánál szereplőkkel. Mindkét modell megoldására a Runge-Kutta 23 differenciálegyenlet megoldót használjuk.
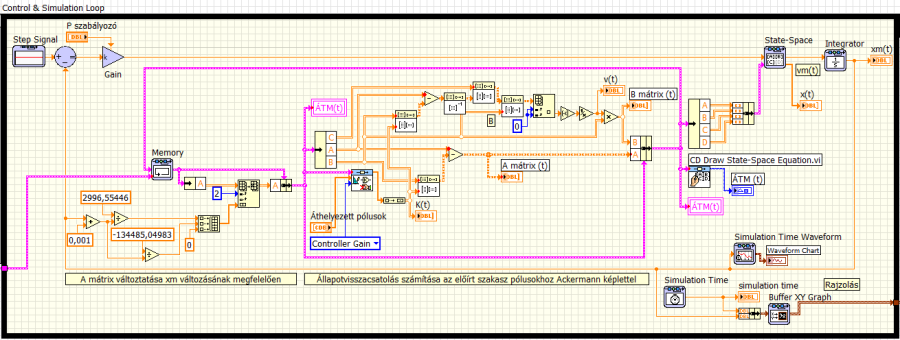
Az elmozdulás időbeli alakulását a szimuláció futása során Waveform Chart kijelzőn folyamatosan követhetjük. Az XY Graphi kijelzőn a futás közben gyűjtött időpont-jelérték párokat ábrázoljuk, miután a Control & Simulation Loop futása befejeződött.
A nemlineáris rendszer eredményeit a lineáris modell eredményeivel az onnan idemásolt, szintén XY Graph-ra rajzolt elmozdulás átmeneti függvény segítségével hasonlíthatjuk össze. Az ábrák alapján kiderül, hogy a linearizált modell meglehetősen jól közelíti a nemlineárist. Az XY Graph kijelzőkön ábrázolt adatokra 16-odfokú polinomot fektetve és azonos időpontokra számítva a polinomiálisan közelített átmeneti függvényeket 0,02 maximális eltérést tapasztalunk a két – 0 és 1 közötti értékeket felveő – átmeneti függvény között a tranziens tartományban.
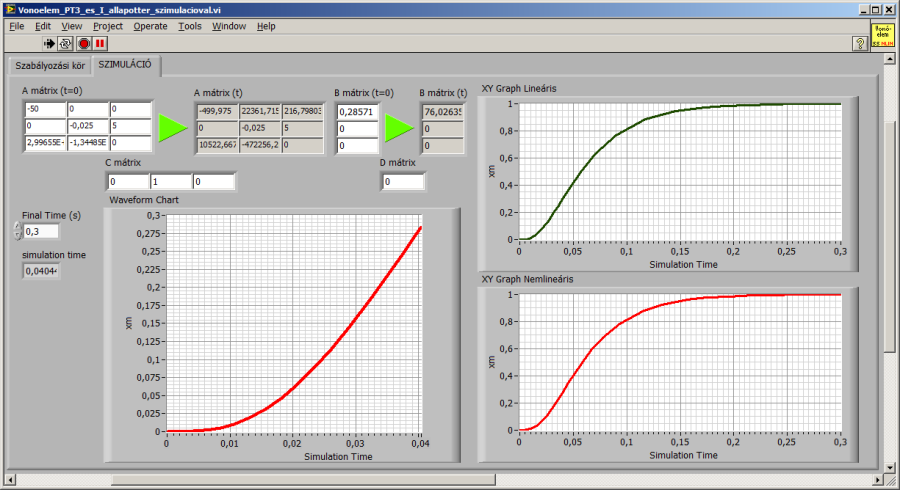
Szintén futás közben követhetjük az állapottér modell alakulását a szabályozási kör sematikus ábráján. A kiindulási állapottér modellel összehasonlíthatjuk az A és B mátrix folyamatosan változó pillanatnyi értékét, valamint követhetjük a három állapotváltozó és az elmozdulás alakulását, nemkülönben az állapotvisszacsatolás K és v paramétereit.
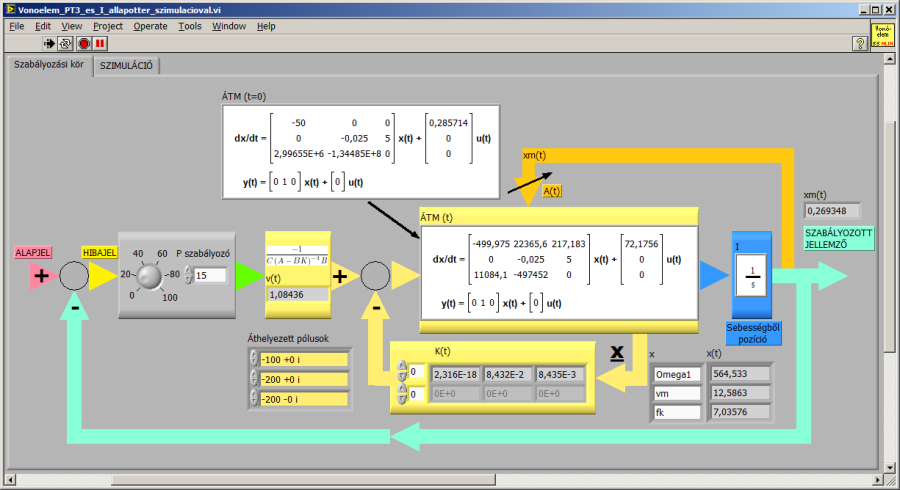
Szakirodalom
[17.1.] LabVIEW 2009 Help http://www.ni.com/pdf/manuals/371361f.zip.
[17.2.] LabVIEW Control Design User Manual, June 2009 http://www.ni.com/pdf/manuals/371057g.pdf.
[17.3.] LabVIEW 2009 Control Design and Simulation Module Help http://www.ni.com/pdf/manuals/371894d.zip.
[17.4.] Maxima, a Computer Algebra System: Documentation http://maxima.sourceforge.net/documentation.html.
[17.5.] COMA, Control Engineering with Maxima és Regelungstechnik mit Maxima http://www.austromath.at/daten/maxima/zusatz/Control_Engineering_with_Maxima.pdf.
[17.6.] The art of control engineering. Addison-Wesley. 1997. ISBN 0-201-17545-2.
18. fejezet - Szervopneumatikus pozícionáló szabályozásának tervezése és szimulációja
A 13. fejezet fejezetben bemutatott rendszer felépítését tekintve lehet egy szervoszeleppel működtetett, amely mindkét kamra töltését és ürítését egy beavatkozóként látja el oly módon, hogy egyidejűleg az egyik kamrát tölti, a másikat pedig üríti, illetve fordítva. Ebben az esetben SISO (egy bemenet, egy kimenet) rendszerről beszélhetünk, ahol a bemenet a szelepre kapcsolt feszültség, a kimenet pedig a dugattyú pozíciója. Másik lehetőség a kamrák külön, azaz két független szeleppel történő töltése és ürítése, mely azzal a könnyebbséggel jár, hogy a töltés és az ürítés egymástól függetlenül történhet. Ezzel a szabályozó számára meghagyjuk, hogy a kamrákban mekkora nyomásértékeket állítson be, más részről -MISO (több bemenet, egy kimenet) rendszerről lévén szó- két bemenetről kell gondoskodni. A 13. fejezet fejezetben a SISO rendszer került részletes bemutatásra, azzal a kiegészítéssel, hogy az eljárás, amennyiben a két szelepre egymással ellentétes működést írunk elő, azaz az egyik szelep töltéséhez a másik ürítését rendeljük, a MISO rendszerre is alkalmazható. Az alkalmazások nagy részében a mért, visszacsatolt jelet kizárólag a munkahengerre szerelt útadó szolgáltatja, míg legújabb szabályozásokban a kamrák nyomásértékei is feldolgozásra kerülnek.
18.1. A szervopneumatikus pozícionáló rendszer paramétereinek meghatározása
A 13. fejezet fejezetben a pneumatikus munkahenger részletes modelljét bemutatva világossá vált, hogy a rendszer nemlineáris (pl. súrlódás) összefüggései mellett több paramétere sem konstans, azaz változik (pl. kamra kapacitások). A nehézkes pozícionálhatóság oka a kamrákban levő sűrített levegő összenyomhatóságának és a nemlineáris súrlódásnak együttes jelenléte, mely kihívásra csak kevés, robosztus szabályozást biztosító szabályozási algoritmus alkalmas. Az üzemszerűen optimális beállást biztosító szabályozáshoz a számos, arányait tekintve nagymértékben változó paraméter a rendszer átviteli függvénnyel történő felírását értelmetlenné teszi –ez alól csak az előző fejezetekben bemutatott, minden egyes pontban az ott érvényes paraméterek meghatározásával és linearizálással történő szabályozási paraméterek meghatározásával tehetünk kivételt. Ezzel együtt a paraméterek meghatározása a legtöbb szabályozási algoritmus számára alapvető fontosságú.
Első lépésként az elkészített rendszermodell vizsgálatához az összefüggéseken túlmenően szükség van az egyes együtthatók (súrlódási együtthatók), paraméterek ismeretére, melyek külön, speciálisan az adott paraméter mérésére fókuszálva mérés útján, vagy a valós rendszer működés közben történő vizsgálatával, paraméterbecsléssel állapítható meg. A paraméterek ismeretében szimulációs környezetben is vizsgálható az adott berendezés. Amennyiben a valós rendszer is rendelkezésre áll, és az egyes szabályozási algoritmusok kipróbálása sem a berendezést, sem a környezetet nem veszélyezteti, azon is tesztelhető - a fejezetben bemutatásra kerülő szabályozók összehasonlítása céljából a paraméterek meghatározása ezen utóbbi módon valósult meg.
Egy szabályozást akkor tekintünk hatékonynak, ha az előírt pozícióba minimális túllendüléssel, maradó hiba nélkül gyorsan beáll. Ezen feltételek egymásnak ellentmondóak, ezért mindig meg kell találni a feladathoz legjobban illő kompromisszumot. Bizonyos esetekben a legfontosabb szempont a gyors beállás, és akár a nagy túllendülés is megengedett, ellentétben a gyártásban használt szerszámgépeknél, ahol elsődleges szempont a túllendülés elkerülése. Ahogy említésre került a szabályozási algoritmus eredményét a paraméterek becslésének pontossága nagymértékben befolyásolja. Ez legjobb szándék ellenére sem teljesen pontos, azaz már ebben a lépésben rontunk a szabályozó optimális működéséhez képest. Emellett megemlítendő, hogy nem csak a paraméterek becsléséhez használt mérés útján nyert adatsorok, hanem a szabályozó működése során felhasznált adatok is zajjal terheltek.
Az általánosan használt PID szabályozás a tipikusan paraméterváltozásra érzékeny szabályozók közé tartozik. Ez többek között abban mutatkozik meg, hogy a pozícionálás pontossága nagymértékben függ a mozgatott tömegtől, a dugattyú pozíciójától, de még a tápnyomás változásától is. A digitális technika fejlődésével nemlineáris, adaptív, illetve egyéb robosztus szabályozási algoritmusok is elterjedtek, melyek a szervopneumatikus szabályozásokban is hatékonyan alkalmazhatóak [18.2.] .
Az alábbi ábrákon különböző paraméterű digitális PID szabályozókkal végzett mérések eredményei láthatók, az egyszerű összehasonlíthatóság végett minden paraméterhez kirajzoltatva a pozíciót, a beavatkozó jelet és a hibajelet. A hibajelek kinagyított ábráin jól nyomon követhetőek a beállások pontosságai, a legpontosabbnak vélt görbe értékének feltüntetésével.
|
Sorszám |
P |
I |
D |
|
data1 |
0,0225 |
2 |
0,057 |
|
data2 |
0,022 |
3 |
0,057 |
|
data3 |
0,022 |
0,5 |
0,057 |
|
data4 |
0,01 |
2,5 |
0,1 |
|
data5 |
0,01 |
1,5 |
0,1 |
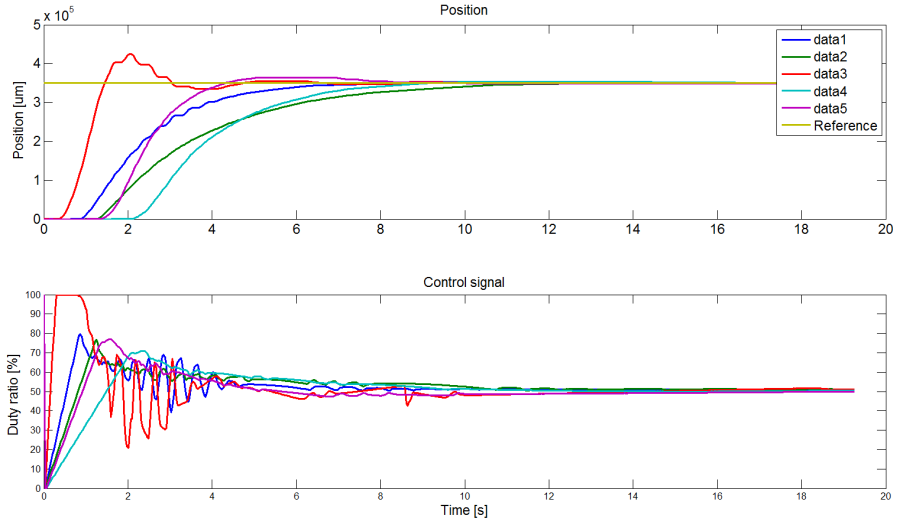
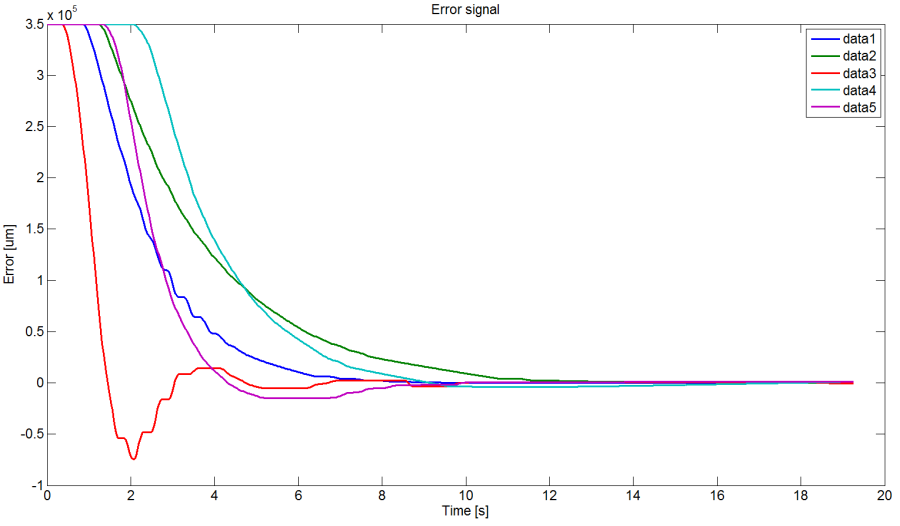
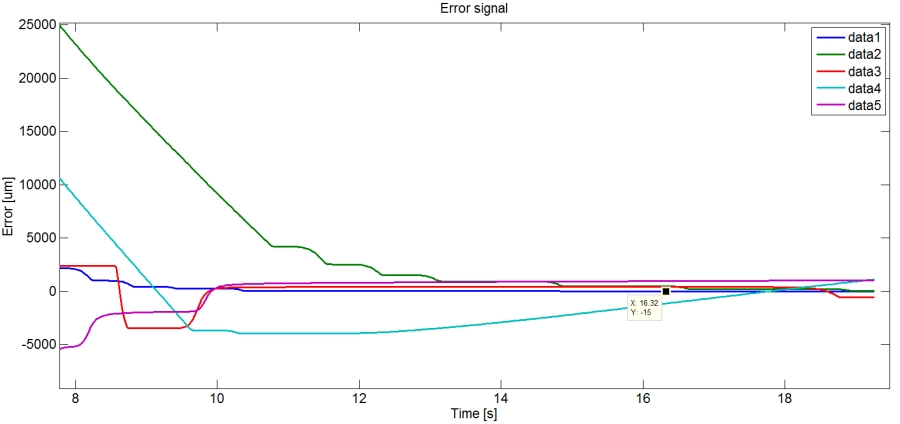
A (18.1. ábra – 18.3. ábra) ábrák eredményét összefoglalva dominánsan kitűnik, hogy az I tag (integráló tag időállandója) növelésével lassul a rendszer és a maradó hiba is lassabban szűnik meg, igaz az aperiodikus jelleg is csökken. A D tag (deriváló tag időállandója) növelésével, ezzel ellentétben, gyorsabb működést érhetünk el. A P (arányos) tag növelésének is gyorsul a beállás, mely továbbá a beállási pontosságot is növeli. Ezzel együtt a szabályozó paraméterei csak szűk tartományban változtathatók, megtalálva a kompromisszumot a fejezetrész elején említett egymásnak ellentmondó szempontokat szem előtt tartva. A további vizsgálat, paraméter változtatások eredményeképpen javul a dinamika, viszont most már szemmel láthatóan megjelenik a Coulomb súrlódás okozta akadozó csúszás hatása is.
|
Sorszám |
P |
I |
D |
|
data8 |
0,02 |
0,8 |
0,06 |
|
data9 |
0,02 |
0,8 |
0,05 |
|
data10 |
0,02 |
0,6 |
0,03 |
|
data11 |
0,02 |
1,5 |
0,03 |
|
data12 |
0,02 |
1,2 |
0,05 |
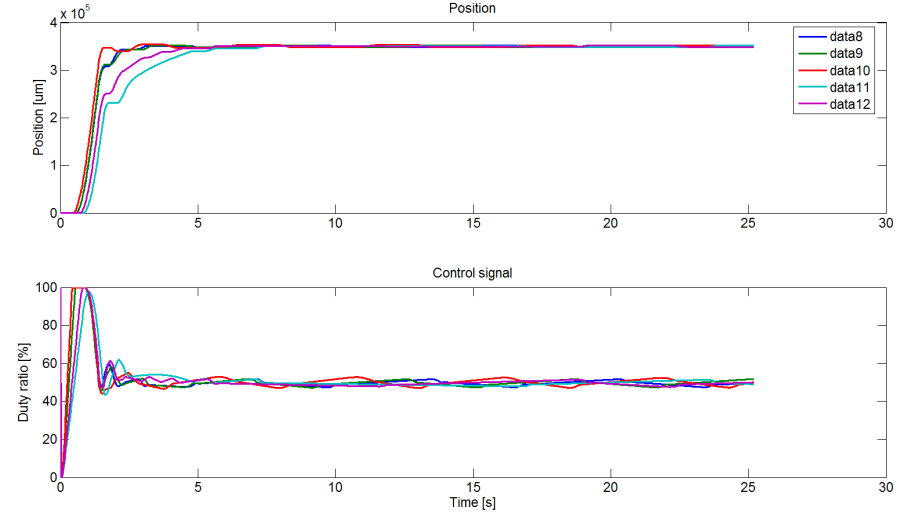
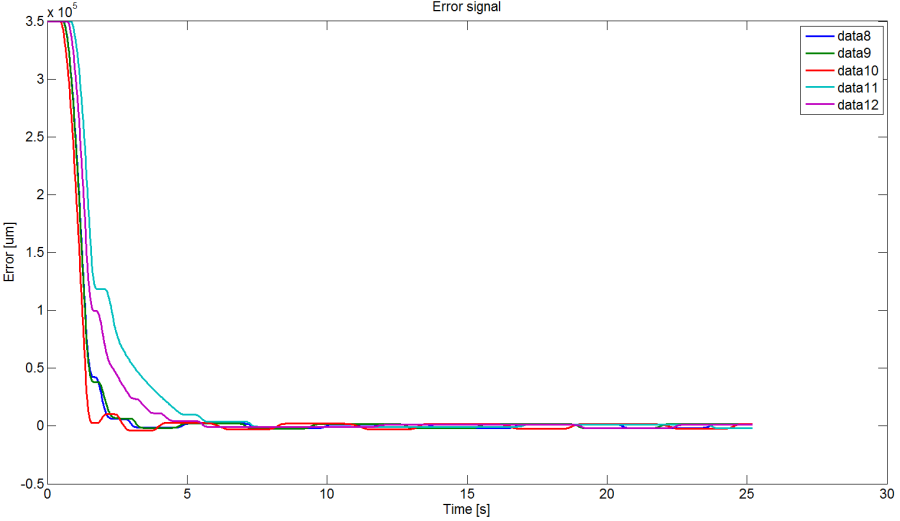
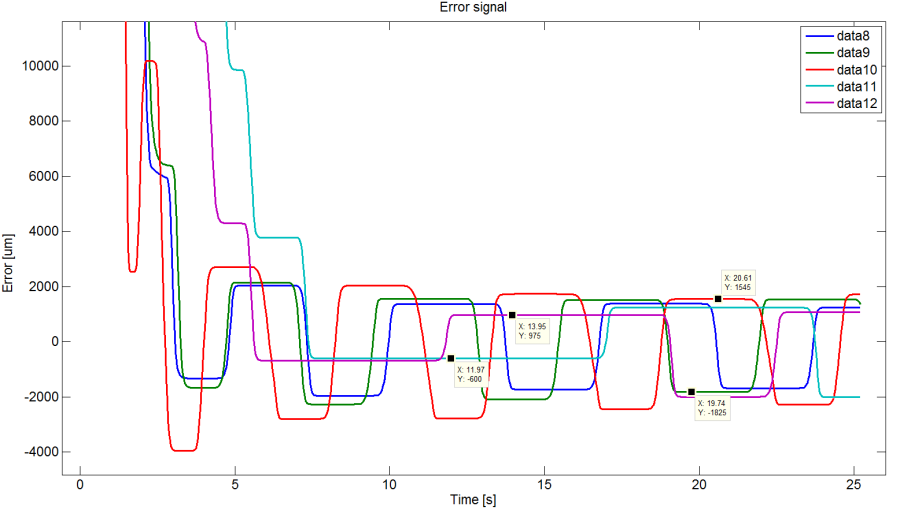
A működés szempontjából optimális eredményeket a (Táblázat 18.2) táblázatban szereplő paraméterekkel lehet elérni, azonban ezeknél a pontos pozícionálás szakaszán az integrátor állandósult hibát eltüntető hatása és a dugattyú betapadása oszcillációhoz vezet. Ez a folyamat úgy értelmezhető, hogy az integrátor a maradó hibát az idő elteltével folyamatosan összegezve -integrálva- növeli a beavatkozó jelet, azaz jelen esetben a kamranyomást. A Coulomb súrlódás miatt a nyomás növekedése nem jár a maradó hiba azonnali csökkenésével, azaz a dugattyú lassú megmozdulásával, hanem az elmozdulás csak akkor következik be, ha a kamrák nyomáskülönbségéből fakadó, dugattyúra ható erő a tapadási súrlódó erő értékénél nagyobb nem lesz. Mivel a haladás során fellépő súrlódó erő a tapadási súrlódó erő értékénél kisebb, ez azzal jár, hogy a dugattyú nem az alapjel által meghatározott pozícióban fog megállni, hanem azon túlszaladva–ezúttal a kívánt pozíciót tekintve azzal ellentétes oldalon- áll meg folyamatos oszcillációt okozva.
A szabályozások másik fontos paramétere, amivel jellemezhetők, a zavarérzékenységük és a terhelésváltozás kompenzáló képességük. Megvizsgálva a PID szabályozó ezen képességét, az eredmények alapján a változást ugyan képes kompenzálni, azonban ez időbe telik, ami jelentős pozícióból történő kimozdulást is eredményezhet.
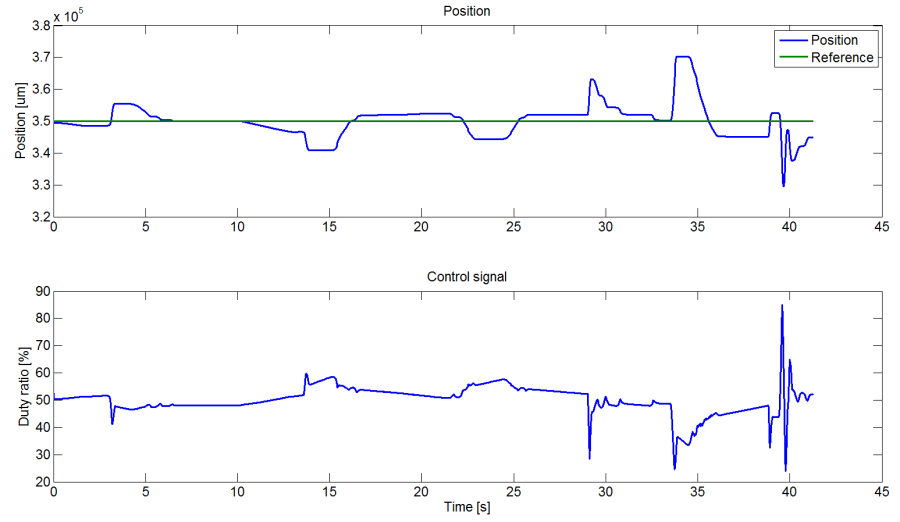
Szakirodalom
[18.1.] Irányítási rendszerek elmélete és tervezése I. Akadémia Kiadó. Budapest . 2009.
[18.2.] Szervopneumatikus pozícionálás pontosságának növelése DSP alapú csúszómód szabályozással, PhD- disszertáció. Debrecen . 2007.
19. fejezet - Módszeres tervezés a mechatronikában
- 19.1. A rendszertervezés természete és metodológiája
- 19.2. Modell-bázisú rendszertervezés
- Szakirodalom
19.1. A rendszertervezés természete és metodológiája
19.1.1. A rendszertervezés fogalma és típusai
A rendszertechnika fogalmait használva egy rendszert és környezetét a 19.1. ábra alapján szoktuk modellezni, ahol a rendszert annak struktúrájával, állapotával és paramétereivel, azaz állapotterével és paraméterterével írjuk le, amely környezetéhez a bemenetekkel és kimenetek-kel, valamint a környezet-rendszer és rendszer-környezet zavarokkal kapcsolódik. Itt a bemeneteket és kimeneteket a rendszer oldaláról akaratlagos, azaz tudatos és eltervezett rendszer- elemekként kezeljük, míg a zavarok többnyire véletlenszerű, a rendszert és/vagy a környezetet nem tervezetten befolyásoló események. Ez a megközelítés természetesen érvényes valamely eszközre vagy berendezésre – nevezzük ezeket egyszerű rendszereknek –, de összetett, több berendezés csatolásával kialakított technológiai hálózatokra is, melyeket nagyrendszereknek fogunk nevezni. Másképpen egyetlen, adott feladatot – műveletet – végrehajtó berendezésre használjuk a műveleti egység elnevezést is.
Ha most azt nézzük, hogy az ilyen rendszerekkel kapcsolatos mérnöki feladatokat általánosságban hogyan lehet csoportosítani, akkor (Bemenet-Rendszer-Kimenet) rendezett hármasból kiindulva a következő három csoportot tudjuk megkülönböztetni.
Rendszerelemzés, melyben adottak a Rendszer és a Bemenet, és meghatározandó a bemenethez tartozó Kimenet. Ez lényegében egy meglévő rendszerrel kapcsolatos kísérletezést jelent a rendszer tulajdonságainak vizsgálatára a stimuláló jel-rendszerreakció párok elemzé-sével.
Rendszerirányítás, melyben adottak a Rendszer és a Kimenet, és meghatározandó az a Bemenet, amely a megszabott kimenetet generálja. Ez lényegében egy meglévő rendszerrel kapcsolatosan annak vizsgálatát jelenti, hogy milyen módon tudjuk a rendszert stimulálni annak kedvező, vagy akár optimális válaszára.
Rendszertervezés, melyben adottak a Bemenet és a Kimenet, és meghatározandó az a Rendszer, amely adott bemenetből a megszabott kimenetet produkálja – lehetőleg a legkedvezőbb módon. Ez tehát egy adott feladat megvalósítására képes rendszer elképzelését és konstrukcióját jelenti.
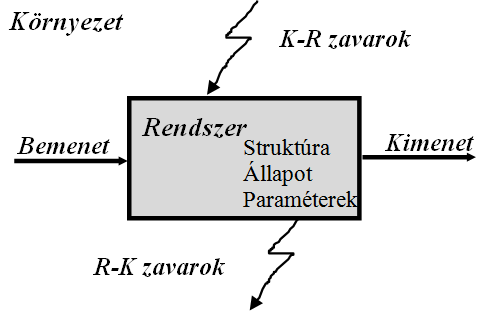
A három feladatcsoport közül kettőben – a rendszerelemzésben- és irányításban – egy-egy meglévő rendszerrel van dolgunk és ezek erősen összefüggő feladatokat jelentenek: az adott rendszert kell kiismerni, tulajdonságait és reakcióit meghatározni, kiválasztani-meghatározni azokat a bemenő jeleket, amelyek a rendszerről a legtöbb információt szolgáltatják vagy a rendszert jól meghatározott, kedvező, esetleg optimális működésre késztetik. A harmadikban, azaz a rendszertervezés során magát a rendszert – akármit is jelent ez adott esetben, mivel ez lehet egy eszköz, berendezés, sőt egy teljes technológiai hálózat – kell létrehozni, mégpedig egy jól meghatározott cél és működés érdekében. Ez tehát jól illusztrálja, hogy a rendszer-tervezés, illetve általában a tervezés lényegében a mérnöki munka talán legösszetettebb alapfeladata: a gyakorlatban még nem létező dolgok elképzelése, részleteinek kidolgozása és – ami ezzel nagyon is összefügg – megvalósítása.
Definíció. A tervezés a célok és lehetőségek közötti keresési folyamat valamely a) funkcioná-lis, b) teljesítmény, és c) esztétikai jellegű követelmények teljesítésére.
Egy adott cél elérését általában különböző szerkezetű, változatú, minőségű és teljesítményű, és nem utolsósorban különböző értékű rendszerekkel lehet megvalósítani. A tény-legesen megvalósítandó változat kiválasztása és részletezése során tehát akkor járunk el megfelelő gondossággal, ha a tervezés folyamatában az összes lehetséges változatot számba vesszük és megvizsgáljuk, és azok összehasonlításával, megfelelő mérlegeléssel választjuk ki a célnak legjobban megfelelő variánst.
A mechatronikai rendszerek struktúrájának és folyamatainak a (19.2. ábra) ábrán bemutatott vázlatos képe jól mutatja a tervezési tevékenység sokrétűségét. A (19.2. ábra) ábrán a folyamat a rendszer által végzett tevékenységet jelenti, amit különböző jellegű és kivitelű aktuátorokkal lehet megvalósítani, aminek a célzatos megvalósítását különböző jellegű és kivitelű szenzorokkal lehet érzékelni, nem beszélve a megfelelő működést biztosító információfeldolgozás és –kezelés változatairól.
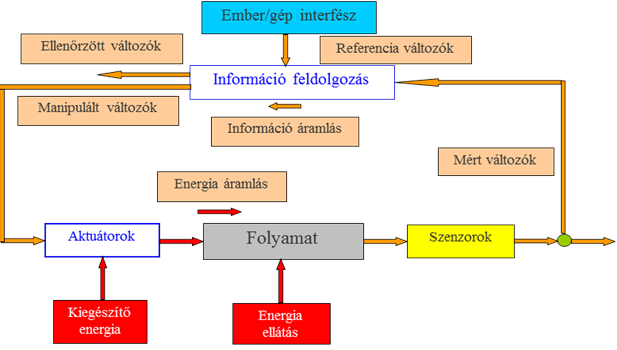
Az összes megoldás tehát általában nagyszámú lehetőséget jelent, melyet azonban sokrétű – alapjában véve objektv – korlátozásokkal gyorsan lehet szűkíteni a lehetséges megoldások, amjd a plauzibilis megoldások tartományára, ahogy ezt a 19.3. ábra szemlélteti. Ez az ábra a krolátozások bizonyos mértékű hierarchiáját is megadja, mivel pl. a fizikai törvények és a hatósági előírások – különösen a technológiai nagyrendszerek esetében – nagyjából azonos szinten kezelendők.
A nagyszámú lehetőség és korlátozás miatt a tervezés folyamata a legtöbb esetben lénye-gében egy iterációs eljárás, ahogy azt a 19.4. ábra mutatja. Itt a feladat megfogalmazásától a vég-leges megoldás kidolgozásáig vezető direkt utat különböző próbálkozások, javítások és visszalépések tarkítják és szakítják meg. A 19.4. ábra egyes pontjainak részletese.
A tervezési feladat precíz megfogalmazása: ez természetesen különböző részletességű lehet az eszközök, berendezések vagy technológiai hálózatok esetén. Itt természetesen a szükséges precizitásra kell gondolni, mivel elégséges megfogalmazást csak a legegyszerűbb esetekben lehet elérni. Ennek a következménye az iterációs eljárás alkalmazásának a szükségessége.
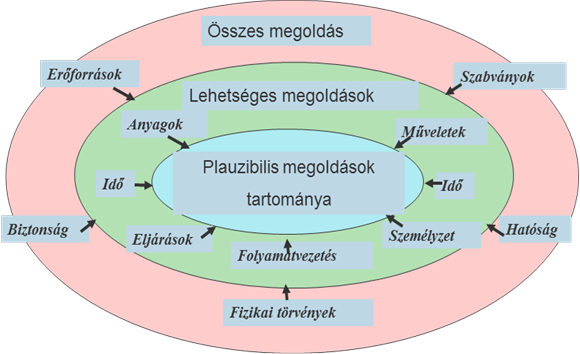 19.3. ábra - A tervezési variánsok halmazának szűkítése a korlátozások alkalmazásával
19.3. ábra - A tervezési variánsok halmazának szűkítése a korlátozások alkalmazásával
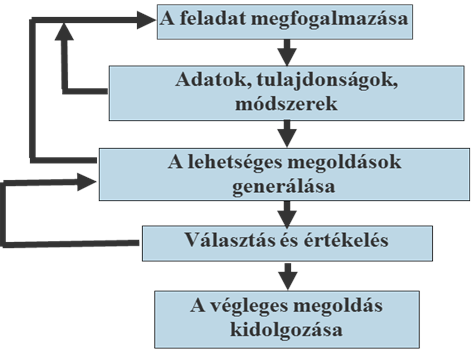 19.4. ábra - A tervezési probléma iterációs megoldása
19.4. ábra - A tervezési probléma iterációs megoldása
Adatok, tulajdonságok, módszerek összegyűjtése: ez a lépés többnyire nagyon széles információhalmazban történő kutatást jelenti az alapkönyvektől egészen az internetig. Jellegzetessége, hogy ennek az információhalmaznak a tervező nem ismeri a terjedelmét és határait, mivel minden egyes mozzanat bővítheti a felhasználható ismereteket.
A lehetséges megoldások generálása: ez lényegében a szintézis-lépés, melyben fontos szerepet játszanak a mérnöki tapasztalat, egyes részletek számításait irányító algoritmusok, vagy akár szakértői rendszerek alkalmazása is. A rendszer komplexitásától függően a lehetséges megoldások száma rendkívül nagy is lehet: minél nagyobb, annál szélesebb változathalmazból kereshetjük ki a kedvező, esetleg optimális megoldást, de ez annál összetettebb értékelési és választási feladatot jelent.
Választás és értékelés: ez lényegében a szintetizált változatok analízisének a lépése, amelynek során figyelembe vesszük a különböző jellegű korlátozásokat, elemezzük a rendszer egyes tulajdonságaira és viselkedésére vonatkozó becsléseket és számításokat. Modell-alapú tervezés esetén szimulációs vizsgálatokkal a részleteket is elemezni tudjuk. Ez a lépés a lehetséges megoldásokból a kedvező, vagy adott feltételek esetén a legjobb megoldást eredményezi
A végleges megoldás kidolgozása: a 3. lépésben kiválasztott – a legjobb megoldásnak tekintett – rendszer-változat részletezése az adott diszciplinának megfelelő sajátos követelmények figyelembevételével.
19.1.2. A tervezés szerkezete és fázisai
Egy tervezési feladat szerkezetét a (19.7. ábra) ábrán bemutatott kérdés-csoporttal, illetve az azokra elvárt válaszokkal tudjuk felvázolni. Az első kérdés nyilván a Miért, hiszen itt ember alkotta, mesterséges, tehát megfelelő célból készülő, nem pedig önmagukban való rendszerekről van szó.
A Mit kérdésre adandó válasz lényegében azt a tevékenységet vagy dolgot specifikálja, melyet a tervezendő rendszernek el kell látnia vagy produkálnia – gyártania – kell. Ez a rendszer (19.1. ábra) ábrán bemutatott kimenetét, azaz a rendszer célját, feladatát specifikálja, és így a következő logikus kérdés: Miből kell, vagy lehetséges a kimenetet alkotó entitást a rendszernek megvalósítania? Ez tehát a bemenet specifikációját jelenti. Természetesen a kimenet meghatározása minden esetben egyértelmű, a bemenet már nem feltétlenül az, mivel itt már alternatív lehetőségek is felmerülhetnek. Ez tehát annyi rendszer-változatot jelenthet, ahány kimenet-bemenet párt találunk, azaz elkezdődhet a lehetőségek számának növekedése.
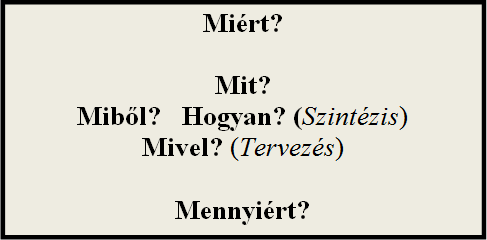
A következő kérdésre adandó válasz általában már jóval összetettebb, mivel ez jelenti a rendszer-változatok generálását, azaz a szintézist, melynek fázisai nagyrendszer esetén a 19.6. ábrán látható koncepcionális és előzetes tervezési lépések, míg egyszerű eszköz vagy berendezés esetén a specifikációs fázisból és a koncepcionális és előzetes tervezési lépésekből áll. Ezek részletezése a (19.6. ábra) ábrán kerül bemutatásra.
A tényleges tervezés lényegében a Mivel kérdés megválaszolását jelenti, melynek során az előzetes tervezésben kialakított tulajdonságú és viselkedésű modell-elemeknek fizikai rendszerelemekkel történő behelyettesítése történik, kiválasztva és részletezve azokat a fizikai elemeket, amelyek a lehető legjobban megfelelnek a tervezés korábbi fázisaiban meghatározott tulajdonságú modell-elemeknek. Ebben a részben a (19.6. ábra és 19.7. ábra) ábrákon a Részletes tervezés és fejlesztés cím alatt felsorolt fő szempontokat vesszük figyelembe a fizikai elemek kiválasz-tásával, vagy egyes fizikai elemek aktuális fizikai tervezésével.
Végezetül az utolsó kérdésként megfogalmazott Mennyiért megválaszolása azonban igazából nem lehet utolsó kérdés, mivel ezt a kérdést a tervezési folyamat bármelyik fázisában újra és újra fel kell tenni.
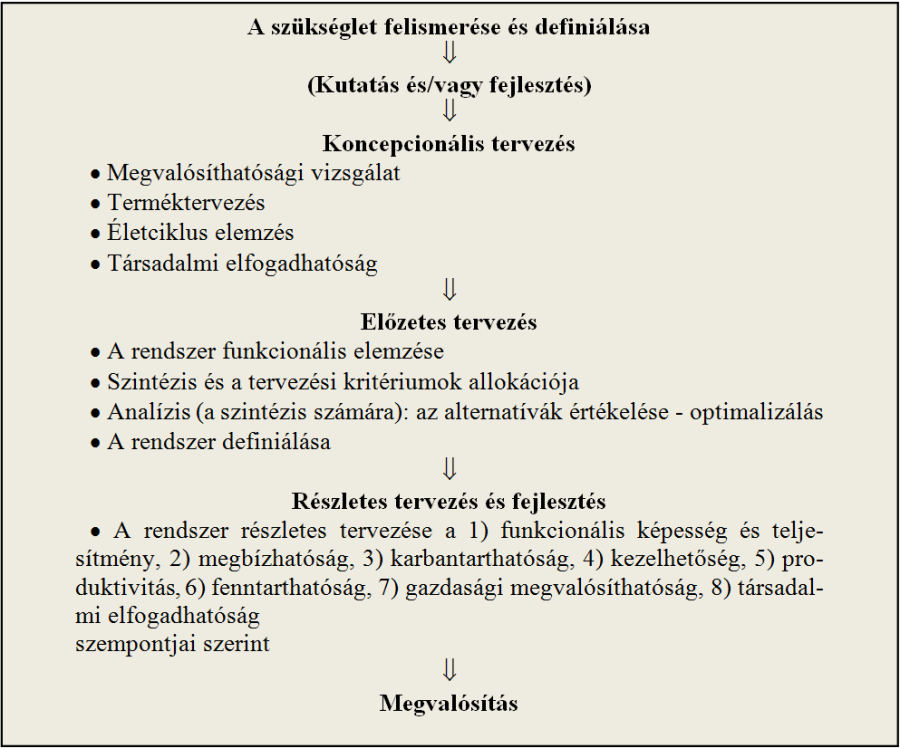
Ennek a kérdésnek a megválaszolása természetesen mindig viszonylagos, ugyanis itt igazából nem az abszolút érték az érdekes, hanem az, hogy adott esetben költségeket tekintve megéri-e? Ennek a kérdésnek a megválaszolása a tervezés során attól is függ, hogy mennyiben állnak rendelkezésre az egyes eszközök, vagy akár teljes technológiák költségeire vonatkozó, hosszabb időszakra feldolgozott statisztikai adatok. A végső megtervezett változatra természetesen az aktuális árak alapján lehet választ adni, ami nem már nem igényel becslést.
Jegyezzük meg, hogy az egyszerű rendszerek és nagyrendszerek tervezési eljárásai között az a jelentős különbség, hogy míg a technológiai hálózatok lényegében egyedi darabok, addig az egyes eszközök és berendezések jelentős része, mint termék, sokszorosításra kerül, így a prototípus megalkotása és a tervezés eredményének ez által történő ellenőrzése egyszerűbb és biztosabb megoldást jelent. Természetesen a nagyrendszerek tervezését is lehet bizonyos mértékig fizikai modelleken, azaz kismintákon keresztül ellenőrizni, de az első megvalósított változat tapasztalatai is sok információt adnak az esetleges későbbi változatok tervezéséhez.
19.1.3. A tervezés modellje
A rendszertervezés, vagy akár általánosabban is fogalmazhatunk a tervezés lényege a problémamegoldás. Ennek alapján a tervezés következő típusait tudjuk megkülönböztetni:
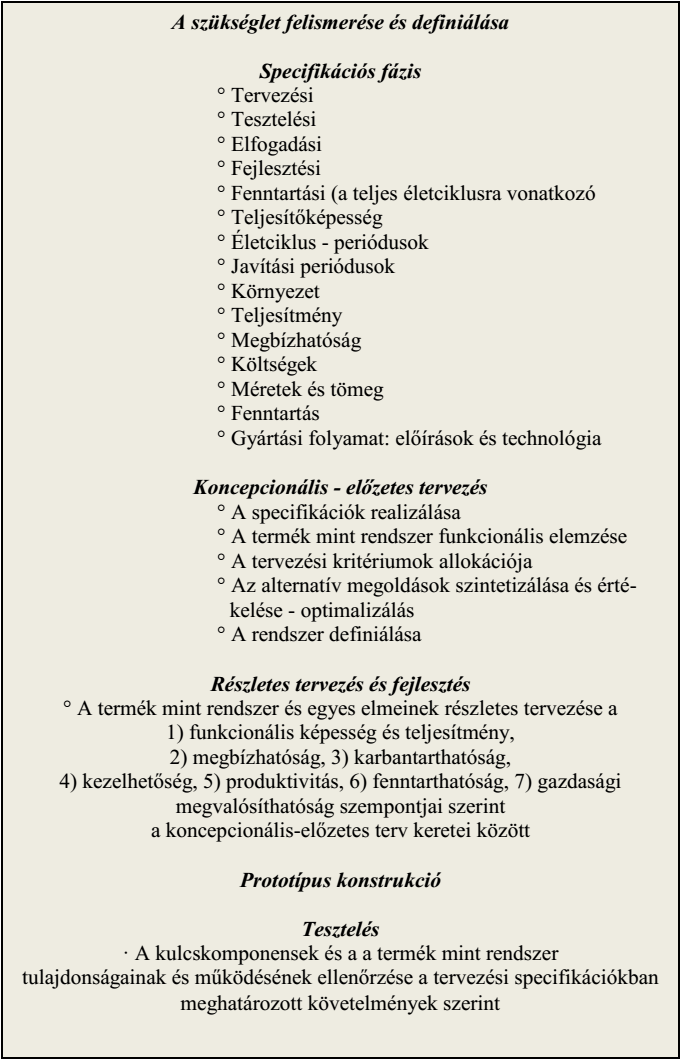
Rutinszerű tervezés, amelyben a tervezendő rendszer komponensei adottak és az ismert komponensekből – az adott célnak és korlátozásoknak megfelelő – rendszer létrehozására szolgáló eljárás is adott.
Innovatív tervezés, amelyben a tervezendő rendszer komponensei adottak, de nem ismert olyan eljárás, amellyel a komponensekből – az adott célnak és korlátozásoknak megfelelő – rendszert létre lehet hozni.
Kreatív tervezés, melynek során sem a tervezendő rendszer komponensei, sem a komponensekből – az adott célnak és korlátozásoknak megfelelő – rendszer létrehozására szolgáló eljárás sem ismeretes.
Természetesen az említett tervezési típusoktól is függ, hogy a tervezés során milyen stratégiát célszerű követni:
Ez lehet cél-vezérelt vagy top-down stratégia, melynek lényege a következő sorrend: a (globális) feladat megfogalmazása, a feladat felbontása részfeladatokra, ameddig csak lehet az aktuális ismeretek alapján, majd a tartomány-specifikus adatok felhasználásával keressük a részfeladatok megoldásait. Ezt a stratégiát elsősorban a rutinszerű tervezésben lehet alkalmazni.
Ez lehet adat-vezérelt vagy bottom-up stratégia, melynek lényege: először az elérhető, tartomány-specifikus adatok összegyűjtése, minden adat alapos vizsgálata és az ezekből történő következtetések végig vitele mindaddig, amíg meg nem találjuk a megoldást. Ezt a stratégiát elsősorban innovatív és kreatív tervezés esetén tudjuk alkalmazni.
Általánosságban azt mondhatjuk, hogy a tervezési folyamatok többnyire a két stratégia kombinációjaként alakulnak ki, mivel a top-down stratégiát tisztán csak rutinszerű tervezésben lehet alkalmazni, míg a bottom-up stratégia önmagában csak algoritmikus tervezés esetén alkalmazható, azaz amikor a tartomány-specifikus adatok ismeretéből kiindulva a teljes további tervezés algoritmusok alkalmazásával megy végbe.
Az eddigiekből (is) jól látható, hogy egy tervezési feladat megvalósítása – különösen a nagyrendszerek esetében – meglehetősen összetett probléma, ezért több absztrakciós szinten célszerű, sőt szükséges megvalósítani. Ezeket az absztrakciós szinteket és kölcsönhatásaikat a 19.8. ábra mutatja be, míg a módszer alapelveit a következő módon foglaljuk össze.
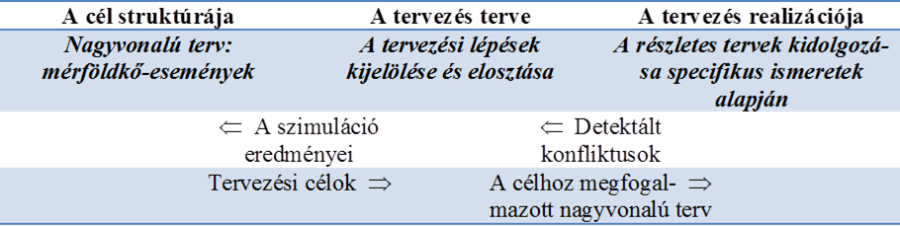
A rendszer terve több absztrakciós szinten kerül kifejtésre.
A tervezés során a magasabb absztrakciós szintektől az alacsonyabb szintek felé haladunk egy hierarchikus tervezési folyamattal.
A hierarchikus tervezési folyamatban a tervezési specifikációk fokozatos finomítása – bővítése – megy végbe.
A tervezési specifikációk fokozatos finomítása során a korlátozásoknak az alsóbb szintek-re való transzformációja biztosítja a szintek közötti konzisztenciát.
Ez két tényezőből áll:
Valamely szint korlátozásainak az alsóbb szintre való közvetítése.
Az alsóbb szint részletesebb specifikációi által indukált új korlátozások kielégítése.
A finomítási lépések végrehajtása a dekompozíció és koordináció elve alapján történik.
Minden absztrakciós szint terv-implementációjának a kidolgozásában a szintézis-analízis-értékelés lépéssorból álló transzformációs tervezési metodika kerül alkalmazásra.
Minden absztrakciós szint terv-implementációja a következő szint implementációjának a specifikációjaként szolgál, egyúttal meghatározva a szintek közötti hatásköri relációkat is.
Az egyes szintek gazdasági potenciálja:

ahol i – az i-edik szintet jelenti
19.2. Modell-bázisú rendszertervezés
19.2.1. Rendszertervezési módszerek
A tervezést két nagy módszerbeli csoportba sorolhatjuk:
Konvencionális tervezés, melynek lépései a következők.
1. lépés.
A tervezendő rendszer struktúrájának és méreteinek specifikációja a tervező aktuális ismeretei – tudásbázisa – alapján.
2. lépés.
A specifikált rendszer számításokkal történő értékelése.
3. lépés.
A változók és paraméterek számított értékei a megengedett értékhatárokon belül vannak?
4. lépés.
Nem. A tervezendő rendszer méreteinek, esetleg struktúrájának módosítása a tervező aktuális ismeretei – tudásbázisa – alapján. Ugrás a 2. lépésre.
5. lépés.
Igen. A tervezés befejeződött. Stop.
Modell-bázisú tervezés, melynek lépései a következők.
1. lépés.
A tervezendő rendszer matematikai modelljének – struktúrájának és viselkedésének, továbbá korlátozásainak a – specifikációja a tervező aktuális ismeretei – tudásbázisa – alapján.
2. lépés.
A specifikált rendszer struktúrájának és méreteinek meghatározása számítógépi modell-kísérletekkel, szimulációval.
3. lépés.
Elfogadhatók az eredmények?
4. lépés.
Nem. A matematikai modell és/vagy a korlátozások módosítása a tervező aktuális ismeretei – tudásbázisa - alapján. Ugrás a 2.lépésre.
5. lépés.
Igen. A tervezés befejeződött. Stop.
Összehasonlítva a két algoritmust mind a kettő az un. trial and error eljáráson alapul, ami a (19.4. ábra) ábrán bemutatott iteratív megoldást jelzi. Ugyanakkor a két módszer alapvetően különbözik egymástól, mivel a konvencionális módszer rögtön a fizikai rendszerre kérdez rá, azaz a fizikai rendszerelemekkel kezdi a tervezést és a későbbiekben – a rész-számítások alapján – szükség esetén ezeket cseréli ki a célnak megfelelően.
A modell-alapú tervezést alapjában véve a tervezendő rendszer egy alkalmas modelljével kezdjük, melynek rendszer-elemei, a csatolásukkal megadott struktúrája és paraméterei megfelelnek a koncepcióban kialakított nagyvonalú tervnek. Ennek a modellnek természetesen tartalmaznia kell a rendszer tulajdonságait és viselkedését visszatükröző szükséges információkat, és a szimulációs vizsgálatok részeredményeit értékelve kell azt módosítani. E módosítást először a paraméterek változtatásával, esetleg a rendszerelemek cseréjével, de szükség
esetén a rendszer elképzelt struktúrájának a változtatásával visszük végbe. Jegyezzük meg, hogy a legnagyobb változásokat a rendszerek struktúrájának módosításával lehet elérni.
A modell-alapú tervezésben a matematikai modelleket, mint a korszerű tervezés alapeszközeit használjuk, így ennek a tervezési módszernek a lényege a modellekkel való manipulációs eljárás. A modell-egyenletek megoldása természetesen megfelelő algoritmusok alkalmazásával történik, azonban az egyes lépések közötti döntések gyakran a mérnöki tapasztalat, bizonyos heurisztikák alapján megy végbe. Itt heurisztikának szigorúan nem igazolt, vagy nem igazolható, tapasztalati tényeken, megfigyeléseken alapuló szabályokat értünk. Ezzel mindjárt meg is jegyezhetjük, hogy a
konvencionális tervezési módszer nagy részben mérnöki heurisztikák alkalmazására épül, de azért természetesen sok számítással, azaz algoritmussal kevert metódus, míg a
modell-alapú tervezés lényegileg használja az algoritmusokat, de azért nem nélkülözheti a mérnöki heurisztikákat. Jelenleg elsősorban az optimális rendszerek tervezésében találkozunk tisztán algoritmusokat használó módszerekkel, amikor is adat-vezérelt módon meghatározzuk a szükséges kiindulási adatokat, valamint az egyenlőségi és egyenlőtlenségi korlátozásokat, és ezzel a többnyire nemlineáris programozást, vagy esetleg vegyes egészértékű nemlineáris programozást alkalmazó optimalizáló módszerre bízzuk a számítások lebonyolítását. Itt az egészértékű, azaz diszkrét programozás a tervezendő rendszer strukturálisan különböző változatainak a generálásához szükséges. Jegyezzük azonban meg, hogy a mérnöki intuíció általában ezekben az esetekben is szükséges, mivel az optimum erősen függ a korlátozó fel-tételektől, és így a modell-bázisú algoritmus 4. lépésében a nem-kielégítő eredmények megfelelő modell és/vagy korlátozó feltételek módosítását igénylik, amit igazából csak a tervező mérnök tud végigvinni.
A rutinszerű tervezés nagymértékben algoritmizálható, míg az innovatív és kreatív tervezési eljárásokban gyakran játszik szerepet a mérnöki heurisztika. A tervezés (19.4. ábra) ábrán bemutatott folyamatában a lehetséges megoldások előállításáig, amely többnyire nagy mennyiségű információ előállítását jelenti, a heurisztikus metodika dominál, míg a további fázisokat már gyakran algoritmikusan is meg lehet oldani.
Figyelembe véve, hogy a felvázolt tervezési algoritmusok lényegében azonos logikán alapulnak, azt mondhatjuk, hogy a tervezés fejlődése elsősorban a felhasználható eszközök és információbázisok fejlődését jelenti. A tervezés kialakítandó modelljének részletes sémát kell tartalmaznia arról, hogy a jól leírt végállapotot hogyan kell elérnie az adott adatbázis keretében. Ehhez a tervező rendszernek következtetéseket kell levonnia a tervezés tárgyának
korlátozó feltételeiből,
oksági viszonyairól, és a
tervezési stratégiákról.
Ehhez az előzőekben vázolt modell-bázisú tervezés mindegyik lépését algoritmizálni szükséges az absztrakciós szinteknek a (19.8. ábra) ábrán bemutatott csatolásával együtt. A fejlesztés tehát ebben az irányban folyik.
19.2.2. A modell-bázisú tervezés formális meghatározása
19.2.2.1. Egyszerű rendszerek tervezése
Egy rendszer modell-bázisú tervezéséhez, ahogy ez a (19.1. ábra) ábrán bemutatott séma és a tervezési feladat értelmezése alapján látható, a rendszer belső világát és a környezettel való kapcsolatait részletesen leíró modell szükséges. Erre a célra a rendszertechnikából ismeretes és ott részletesen vizsgált állapottér modelleket tudjuk felhasználni, amelyek általános alakja a következő egyenletekből áll.
Az állapot-átmeneti, vagy belső egyenlet-rendszer
|
|
(19.1) |

egy közönséges differenciálegyenlet-rendszer az  kezdeti feltételekkel. Itt az
kezdeti feltételekkel. Itt az  az N-dimenziós rendszer állapota, az
az N-dimenziós rendszer állapota, az  nemlineáris függvények a rendszer struktúráját leíró állapot-átmeneti függvényrendszert alkotják, az
nemlineáris függvények a rendszer struktúráját leíró állapot-átmeneti függvényrendszert alkotják, az  a bemeneti változók vektora és
a bemeneti változók vektora és  a paraméterek vektora.
a paraméterek vektora.
A rendszer kimeneteit meghatározó algebrai egyenletek az
|
|
(19.2) |

formában adottak, ahol  a kimeneti változók vektora és a
a kimeneti változók vektora és a  a kimenet struktúráját meghatározó függvényrendszer.
a kimenet struktúráját meghatározó függvényrendszer.
A korlátozó egyenlőtlenségi relációk:
|
|
(19.3) |
ahol az  a korlátozó függvények vektora és
a korlátozó függvények vektora és  a korlátozások értékeit meghatározó vektor.
a korlátozások értékeit meghatározó vektor.
Az (19.1)-(19.3) dinamikus rendszerben az
f leírja a rendszer struktúráját és viselkedését, a
p leírja az f struktúrájú és viselkedésű rendszer megvalósulási változatait, míg az
(s,v) páros meghatározza a rendszer állapotváltozóinak, bemeneti változóinak és paramétereinek a korlátait. A (19.2) kimeneti egyenleteken keresztül természetesen a kimeneti változókra is megadhatjuk azok korlátozásait.
A p paraméterek egy részét az anyagi – konstitutív – mennyiségek alkotják, ezt az a vektorral jelöljük és a rendszerelemek tulajdonságait jellemzik, míg a másik része a rendszerelemek kapcsolatait határozza meg, azaz a rendszer struktúráját jellemzik. Ezeket a tervezés során a d vektorral jelöljük így a paraméterek vektorát a
|
|
(19.4) |

A rendszerek tervezését elsősorban az állandósult állapotokra, azaz tulajdonképpen a rend-szerek üzemelési állapotaira tervezzük, ami azt jelenti, hogy a tervezési összefüggéseket az s indexszel jelölt állandósult – stacionárius – változókra érvényes
|
|
(19.5) | |
|
|
(19.6) | |
|
|
(19.7) |
algebrai egyenletek és korlátozások jelentik.
A modell-bázisú tervezés egyik fontos fogalma a modell szabadsági foka, amit a következő módon határozunk meg.
Legyen az (19.5)-(19.7) összefüggésekben az összes változó, azaz  száma Nv=N+ M+L+P, és legyen a változók közötti független és ellentmondásmentes (19.5)-(19.6) egyenletek száma Nr=N+L. Akkor a rendszer szabadsági fokát az Nsz=Nv-Nr=M+P különbség adja meg, amely a tervezés során megválasztható változók maximális számát jelenti. Ha most Nd-vel jelöljük a rendszer tervezéséhez felhasznált változók számát, akkor érvényes az
száma Nv=N+ M+L+P, és legyen a változók közötti független és ellentmondásmentes (19.5)-(19.6) egyenletek száma Nr=N+L. Akkor a rendszer szabadsági fokát az Nsz=Nv-Nr=M+P különbség adja meg, amely a tervezés során megválasztható változók maximális számát jelenti. Ha most Nd-vel jelöljük a rendszer tervezéséhez felhasznált változók számát, akkor érvényes az  feltétel.
feltétel.
Ha Nd=0, akkor az (19.5)-(19.6) egyenletrendszer megoldása egyértelmű és nincs valódi tervezési probléma.
Ha Nd<0, akkor a probléma túldefiniált, azaz csak triviális megoldás létezhet, és a modellünk hibás, azaz ellentmondásos.
Ha Nd>0, akkor rendszer tervezője Nd változó értékét választhatja meg a tervezés szempontjainak megfelelően.
Jegyezzük meg, hogy a tervezési változók közül az  bemeneti változókat sok esetben már a részletes tervezési fázis előtt, a Miből kérdésre adandó válasz esetén rögzítjük, ezért ekkor gyakorlatilag csak a paraméterekkel gazdálkodhatunk. Valójában ez jelenti a rendszer tényleges tervezését, mivel a rögzített kimenethez a bemenet megválasztása többnyire erősen determinált, amit szükség esetén az iterációs lépésekben tudunk módosítani.
bemeneti változókat sok esetben már a részletes tervezési fázis előtt, a Miből kérdésre adandó válasz esetén rögzítjük, ezért ekkor gyakorlatilag csak a paraméterekkel gazdálkodhatunk. Valójában ez jelenti a rendszer tényleges tervezését, mivel a rögzített kimenethez a bemenet megválasztása többnyire erősen determinált, amit szükség esetén az iterációs lépésekben tudunk módosítani.
Definíció. Az ( 19.5 )-( 19.7 ) dinamikus rendszer tervezése során a feladat a rendszer struktúráját meghatározó f , és mellette a kimenetet generáló g függvények, valamint a p paraméterek meg-határozása megadott y s és u s kimeneti és bemeneti változók és a korlátozások ( s , v ) ismeretében.
Ennek a folyamatnak a lépései a következők.
Megadjuk a rendszer belső modelljét és a korlátozó feltételeket
(19.8)
(19.9)
és rögzítjük a bemeneti változók és a paraméterek kezdeti értékeit.
Megoldjuk a (19.8) egyenletrendszert az xs állapotra:

(19.10)
A kapott xs állapotot behelyettesítjük a kimeneti egyenletbe

(19.11)
és a korlátozó feltételekbe

(19.12)
Teljesülnek-e a korlátozó feltételek?
Nem. Módosítjuk a paraméterek és/vagy a bemeneti változók értékeit és ugrás a 2o lépésre.
Igen: Ugrás az 5o lépésre.
Kedvezőek az állapot és kimeneti értékek?
Nem. Módosítjuk a paraméterek és/vagy a bemeneti változók értékeit és ugrás a 2o lépésre.
Igen. Ugrás az 6o lépésre.
Az eredmények adminisztrálása. Stop.
Ezt az eljárást nemlineáris rendszerekre mutattuk be, de természetesen a lineáris dinamikus rendszerekre is közvetlenül értelmezhető, mivel (19.1)-(19.3), illetve (19.8)-(19.11) összefüggéseknek a rendszertechnikából jól ismertek a lineáris megfelelői.
19.2.2.2. Összetett rendszerek
Az egyszerű rendszerek tervezési kérdéseit tárgyaló előző szakaszban nem határoztuk meg a
változók és egyenletek számát, ami azt mutatja, hogy az egyszerű rendszer fogalom modell-szinten nem attól függ, hogy hány változó van a modellben. Ezt a problémát röviden már értelmeztük a 19.1. ábrakapcsán, ahol az egyszerű rendszer fogalmat egy műveleti egységgel társítottuk, míg a műveleti egységek technológiai sorba szervezett csoportját neveztük összetett rendszernek. Modell-szinten egy rendszert akkor nevezünk összetettnek, ha az megfelelően csatolt kompakt alrendszerekből épül fel, vagy – ha most az (19.1)-(19.3) összefüggésekből indulunk ki – abban kompakt, hálózatba csatolt alrendszereket tudunk elkülöníteni. Ezeket az alrendszereket feleltetjük meg a műveleti egységeknek, míg maga az összetett rendszer a teljes technológiai hálózatnak felel meg.
Egy összetett rendszer, a továbbiakban egyszerűen hálózat, struktúráját a (19.9. ábra) ábrán bemutatott (U,S) szerkezeti gráffal tudjuk megadni. Itt az U=(u1,u2,u3,u4,u5) szögpontok a műveleti egységek halmazát, míg az S=(s1,s2,s3,s4,s5,s6,s7,s8,s9,s10,s11) irányított élek a műveleti egységek közötti kapcsolatokat reprezentálják. A szögpontok önmagukban (19.8)-(19.11) típusú dinamikus rendszereket reprezentálnak, melyek a bemenet-kimenet párokkal kapcsolódnak egymáshoz. Ezek a kapcsolatok többnyire teljesítmény-kapukon keresztül jönnek létre, amikor is a teljesítmény-konjugált változók közül az irányított élek a megfelelő áramokat jelölik. Azonban ezek az élek lehetnek információ-áramok is információ-kapukon keresztül.
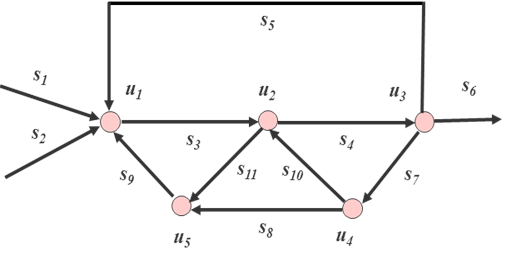
A technológiai hálózatok struktúrájának (19.9. ábra) ábrán látható geometriai képe nagyon szemléletes és a koncepció kialakításánál jól használható, de a számításokban többnyire az algebrai reprezentációkat használjuk. Ezek közül – a 19.9. ábra szerkezeti gráfjára vonatkozóan – az A illeszkedési mátrix az
|
|
(19.13) |
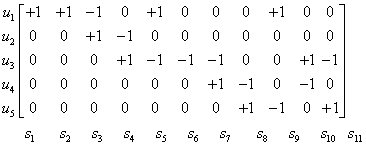
alakú, amelyben az egyes irányított éleknek a szögpontokra való illeszkedéseit jelöljük úgy, hogy a kimenet kapcsolatot -1-gyel, míg a bemenet kapcsolatot +1-gyel jelöljük.
A másik jellegzetes algebrai leírást a N szomszédossági mátrix jelenti, melyet a következő mátrix ad meg
|
|
(19.14) |
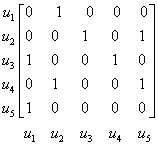
ahol a szomszédosságot azzal jelöljük, hogy valamely szögpontból vezet-e közvetlen él valamelyik másik, azaz ebben az értelmezésben a szomszédos szögpontba. Jegyezzük meg, hogy itt a szomszédosság nem szimmetrikus reláció.
Végül vegyük a C körmátrixot, amely az irányított élek által alkotott irányított köröket, azaz hurkokat jelöli meg az alábbi módon
|
|
(19.15) |
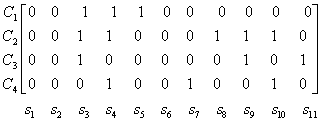
Vegyük észre, hogy a rendszerben megjelenő szomszédosságokat és hurkokat már az illeszkedési mátrixból elő tudjuk állítani, ezért elemzés esetén elégséges az illeszkedési mátrix megadása. Azonban mind a szomszédossági mátrixot, mind a körmátrixot hasznosan lehet felhasználni a számítások szervezése során, ezért célszerű azokat is explicite megadni.
Az összetett rendszer teljes leírásához természetesen szükség van a szögpontok által reprezentált alrendszerek modelljeinek a megadására, ami az
|
|
(19.16) | |
|
|
(19.17) | |
|
|
(19.18) |



függvény kapcsolatok specifikációját jelenti. Itt Nu az alrendszerek – szögpontok – száma.
A (19.16)-(19.17) egyenleteket természetesen kiegészítik a struktúrát meghatározó kapcsolati egyenletek
|
|
(19.19) |

ahol K a kapcsolati mátrix, amely lényegében a bővített A illeszkedési mátrix transzponáltja-ként határozható meg,  és
és 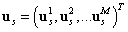 pedig az összes kimenet és bemenet vektorai. A bővítés tehát azt jelenti, hogy az illeszkedést az összes bemeneti és kimeneti változóra ki kell jelölni, figyelembe véve magának a rendszernek a bemeneteit és kimeneteit is.
pedig az összes kimenet és bemenet vektorai. A bővítés tehát azt jelenti, hogy az illeszkedést az összes bemeneti és kimeneti változóra ki kell jelölni, figyelembe véve magának a rendszernek a bemeneteit és kimeneteit is.
Most a rendszer szabadsági fokát az
|
|
(19.20) |
képlettel számoljuk, ahol  az i-edik alrendszer szabadsági foka,
az i-edik alrendszer szabadsági foka,  a csatolt bemenetek és kimenetek szabadsági fokai, mivel azokat a hálózat struktúráját megadó NK kapcsolati egyenlettel már lekötöttük.
a csatolt bemenetek és kimenetek szabadsági fokai, mivel azokat a hálózat struktúráját megadó NK kapcsolati egyenlettel már lekötöttük.
Az összetett rendszerek szerkezeti gráfjában az élek irányítása egyúttal megadja az alrend-szerek közötti számítási sorrendet is, mivel a (19.16)-(19.17) egyenletek azt mutatják, hogy valamely alrendszer – a számítások tárgyalásában ezeket számítási moduloknak nevezzük – bemeneteinek ismerete lehetővé teszi a kimenetek számítását. Azonban, mivel ezek össze vannak kötve a kapcsolásban következő modul(ok) bemeneteivel, így most már azok is számíthatók. Ezt figyelembe véve az összetett rendszerek számítását struktúrájuktól függően a következő módon végezhetjük.
Ha a rendszerben nincs hurok, azaz mindegyik számítási modul elérhető szekvenciálisan a korábbi modulokból, akkor azt a moduláris vagy egyszerű szekvenciális módszerrel, azaz direkt módon számolhatjuk. Erre mutat példát a 19.10. ábra, ahol csak azt kell megkeresni, hogy a rendszer melyik bemenetével vagy bemeneteivel kell, illetve lehet a számításokat elkezdeni. Ezt a számítási sorrend meghatározásának nevezzük.
A (19.11. ábra) ábrán bemutatott rendszer már csak un. iterációs-szekvenciális számítással érté-kelhető, mivel két kör vagy hurok is található a rendszerben. Ezért, pl. a számítás már az u1-nél megakad, mivel annak számításához szükséges lenne az s10 bemenet ismeretére, de ezt csak az s3, majd – visszafelé – az s2, s1 és az s10 ismeretében tudjuk meghatározni, ami zárja a kört: az s10-et akkor tudjuk kiszámítani, ha ismerjuk az s10-et!
Ezt az ellentmondást a hurok felvágásával és iterációval tudjuk feloldani, ami a 19.11. ábra alapján a következőket jelenti: megbecsülve s10” értékét végig tudjuk számolni a hurkot, ami megadja az s10’ értékét.
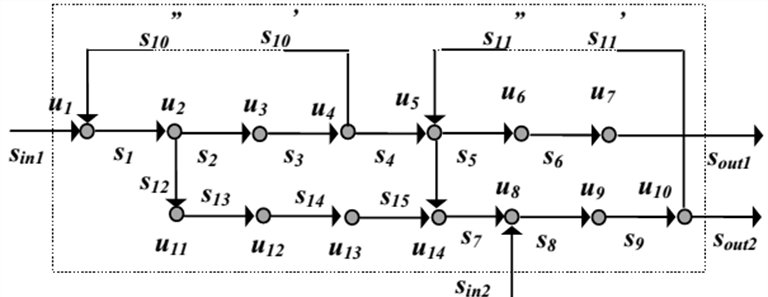
Az  különbség alapján újabb becslést adva az s10” értékére ismételten számolhatunk, és megfelelő iterációs stratégiát választva a cél az
különbség alapján újabb becslést adva az s10” értékére ismételten számolhatunk, és megfelelő iterációs stratégiát választva a cél az  feltétel elérése, ahol az ε elégségesen kis pozitív szám. Hasonló módon tudjuk feloldani az esetleges további köröket vagy hurkokat.
feltétel elérése, ahol az ε elégségesen kis pozitív szám. Hasonló módon tudjuk feloldani az esetleges további köröket vagy hurkokat.
A (19.11. ábra) ábrán látható rendszer rendelkezik egy fontos tulajdonsággal: a két kör egymástól független, azaz az első kör számításába nem kell a második kör iterálását bevonni, miközben
második kör az elsőt követően szekvenciálisan számolható. Ezt úgy nevezzük, hogy a hálózat két partícióra bontható, melynek lényege, hogy a partíciók önállóan, megfelelő szekvenciákban számíthatók
Nem rendelkezik ezzel a hasznos tulajdonsággal a (19.12. ábra) ábrán látható hálózat, ahol a két kör az u3 szögponton keresztül kapcsolódik. Ezek a körök csak egyidejű felvágással számíthatók, ami általában több iterációs változót és bonyolultabb számításokat jelent.
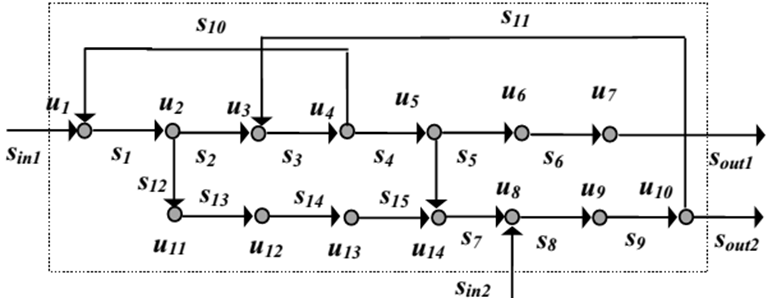
A (19.11. ábra és 19.12. ábra) ábrák hálózatai között azonban van még egy jelentős különbség: a 19.11. ábra esetén nem egyidejűleg, de mindkét hurkot fel kell vágni, míg a 19.12. ábra hálózatában elég az s3 él felvágását elvégezni, mivel ezzel egyidejűleg mind a két hurkot felvágjuk.
Definíció. Független körök. Egy technológiai hálózatban egy kör független a többitől, ha legalább egy olyan éle van, amelyik a többi kör egyikének sem éle.
Definíció. Minimális felvágás. Egy hálózatban legfeljebb annyi élt kell felvágni, amennyi a független körök száma. A felvágások száma csökkenthető a független körök közös éleinek kiválasztásával.
Összefoglalva, a hálózatok moduláris számításának lépései:
|
1. lépés. |
Körkeresés a hálózat részletes átvizsgálásával. Ha nincs kör, akkor ugrás a 4. lépésre, ha van, akkor ugrás a 2. lépésre. |
|
2. lépés. |
Hálózat-particionálás. |
|
3. lépés. |
Minimális felvágás meghatározása. |
|
4. lépés. |
Számítási sorrend meghatározása. |
|
5. lépés. |
Számítások. |
19.2.3. Tervezési példa 1: Meghajtás tervezése egyenáramú motorral
A rendszertechnikai szempontból villamos teljesítmény → mechanikai teljesítmény transz-formációt végző, azaz zsirátor jellegű egyenáramú motorok a mechatronikai rendszerek, elsősorban az aktuátorok alapvető elemeit alkotják. Az egyenáramú (DC) motorok lényegé-ben két villamos alrendszerből és egy mechanikai alrendszerből állnak, ahogy ezt a 19.13. ábra szemlélteti. Jellemzőik:
Jól szabályozható sebesség.
Jó forgásirány reverzibilitás.
Gyors válasz (nagy forgató nyomaték/rotor-inercia arány).
Dinamikus fékezés vagy regeneratív fékezési lehetőség a gyors megállás biztosí-tására.
19.2.3.1. A koncepció
A mechatronikában természetesen nem az egyenáramú motorok tervezésével foglalkozunk, hanem a rendszer céljának a megfelelő karakterisztikájú motorok kiválasztása, a rendszerbe történő beépítésük, valamint a motorok irányításának a tervezése a feladat.
Az egyenáramú motorok szelekciója során a következő lépések szerint haladhatunk:
Mi a cél: pontos helyzet-beállítás vagy megadott forgási sebesség?
A cél elérésének módja: vezérléssel vagy szabályozással?
A feladat: egyenletes forgási sebesség?
Mekkora legyen a maximális sebesség?
A feladat: diszkrét vagy folytonos helyzet-beállítás?
Ha nem kell állandó működés, akkor milyen ciklusidővel kell a motornak működnie?
Mekkora a tervezett terhelés tehetetlensége?
Mekkora teljesítmény szükséges?
Mekkora forgatónyomaték szülkséges?
Szükséges-e a forgási irány változtatása?
Kell a hajtáshoz mechanikai transzformáció? (Transzmisszió, áttétel, hajtómű)
Van méret vagy súlykorlát?
Milyen legyen a motor karakterisztikája?
A terhelés és a motor karakterisztikája ismeretében hogyan alakul a munkapont?
Megfelelő a motor indulása és gyorsulása?
Az első tizenhárom pont tehát a rendelkezésre álló motorok szelekciójára vonatkozik, amit többnyire un. ököl-szabályok, azaz mérnöki heurisztikák alkalmazásával hajtunk végre. Ez azonban meghatározza a kiválasztott motor vagy motorok karakterisztikáit és a további mo-dell-számításokhoz szükséges paramétereit is.
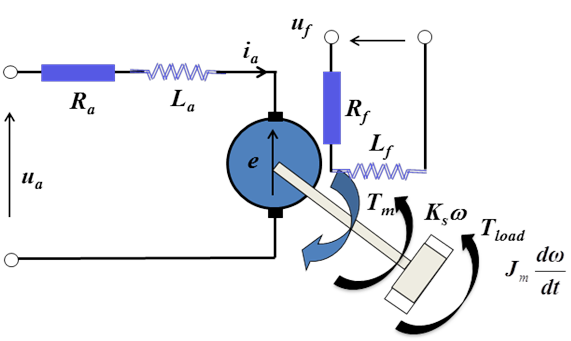
A választáshoz felhasznált alapvető karakterisztikák a forgatónyomaték-szögsebesség valamint az armatúra áramerősség-forgatónyomaték állandósult állapotbeli függvények. Ezek gyakran lineáris összefüggések, azaz az egyenáramú motorok lineáris rendszerekként kezelhetők, ami jelentősen megkönnyíti a tervezést.
Az egyenáramú motorok karakterisztikákat meghatározó strukturális változatai.
Az állórész állandó mágnes:
Nincs az állórészben hő-disszipáció, könnyű és kisebb a többi motornál, egyszerű kapcsolással változtatható a forgásirány, kitűnően lehet alkalmazni a számítógépes szabályozásban a lineáris karakterisztikák következtében (19.14. ábra)
Külső gerjesztésű motor:
Az armatúrát és állórészt egymástól független feszültségforrásból tápláljuk, a gerjesztő áram erőssége nem függ a terheléstől, karakterisztikái hasonlóak – lineárisak – az állandó mágnes-állórészű motor karakterisztikáihoz (19.14. ábra)
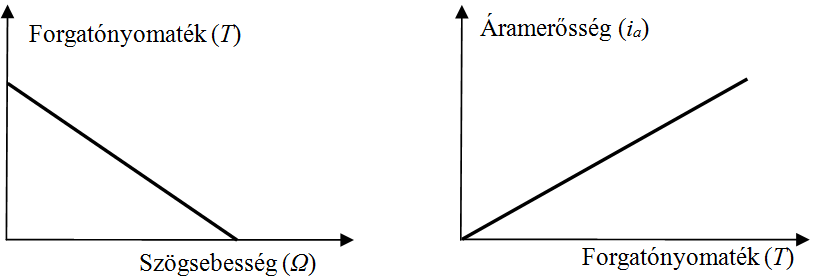 19.14. ábra - Az állandó mágneses és külső gerjesztésű DC motorok lineáris karakterisztikái
19.14. ábra - Az állandó mágneses és külső gerjesztésű DC motorok lineáris karakterisztikái
Párhuzamos (mellékáramkörű) gerjesztésű:
Az áramterhelés az armatúra- és állórész-áram összege, a forgási sebesség széles terhelés-tartományban állandó, az indító forgatónyomaték a munkapontnak kb. 1.5-szerese, az indító forgatónyomaték a legkisebb az egyes változatok közül, ezért az indítást változtatható ellenállással lehet megfelelően szabályozni.
Soros (főáramkörű) gerjesztésű:
Nagy az indító forgatónyomatéka, a forgási sebesség erősen változik a terhelés függvényében, kis terhelés esetén nagy forgási sebességet érhet el. Sebesség-elfutás veszélye áll fenn (a hiperbolikus karakterisztika miatt).
Vegyes gerjesztésű (a soros és párhuzamos kapcsolás kombinációja):
Az indító forgatónyomaték valamivel kisebb a hasonló méretű soros motoroknál, a forgási sebessége korlátos, rosszabb a sebesség-szabályozhatósága a párhuzamos motorokénál.
19.2.3.2. Motor-szelekció és az indítás tervezése
Feladat: viszonylag könnyen szabályozható, állandó fordulatszámot biztosító egyenáramú motor modell-alapú tervezése, Ehhez a gép matematikai modelljének kidolgozását és elemzését kell elvégezni az eszköz tulajdonságainak és működésének vizsgálata céljából.
Az előzőekben megadott rövid jellemzések alapján egy megfelelő paraméterekkel rendelkező mellékáramkörű egyenáramú motort célszerű választani, amelynek kapcsolási vázlatát a 19.15. ábra szemlélteti. A kedvező teljesítmény elérése érdekében a motort úgy célszerű megválasztani, hogy a terhelés tehetetlensége legyen hasonló a motor saját tehetetlenségéhez. Ha a motor és a terhelés között reduktort tervezünk, akkor az a terhelés Jl tehetetlenségét a motorra a Jl/N2 értékkel közvetíti, ahol az N az áttételt jelöli. Ha ezt a motor Jm saját tehetetlenségével egyenlőnek választjuk, akkor a maximális gyorsulást érhetünk el, azonban a forgatónyomaték értéke minimális lesz. Egy jó kompromisszumot jelent a
|
|
(19.21) |

ökölszabály szerinti választás.
A kedvező üzemelés érdekében természetesen elégséges forgatónyomatékot szükséges biztosítani a terhelés által keltett súrlódás legyőzésére és valamely távolság – a motor tengelyére vonatkoztatott am=Nal szöggyorsulás – gyors elérését jelentő gyorsulás biztosítására. Itt a
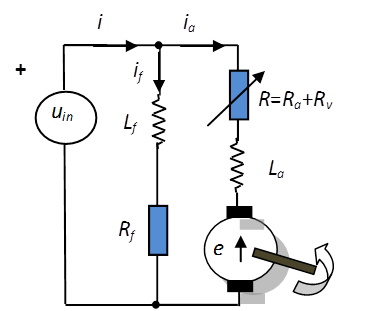
 a terhelés elvárt szöggyorsulását jelöli. A motor forgatónyomatékát a
a terhelés elvárt szöggyorsulását jelöli. A motor forgatónyomatékát a
|
|
(19.22) |

képlettel számolhatjuk (Ts a súrlódás legyőzéséhez szükséges forgatónyomaték), és az így kapott értéket általában 50 százalékkal célszerű megnövelni.
A kedvező forgatónyomaték-érték mellett a terhelés megfelelő forgási sebességének eléréséhez teljesítményt is biztosítani szükséges. Ennek becsléséhez általában elhanyagolható értékkel járul hozzá a súrlódási komponens és lényegében a terhelés megfelelő gyorsításához szükséges
|
|
(19.23) |
teljesítményt kell figyelembe venni, ahol J a teljes mozgatott tehetetlen nyomatékot, míg az s a τ idő alatt elérendő elmozdulást jelöli. A (19.23) képlet azt mutatja, hogy a J tehetetlen nyomaték mozgatásának fele időre való felgyorsításra nyolcszoros teljesítmény szükséges.
A (19.15. ábra) ábrán bemutatott kapcsolási vázlat alapján a mellékáramkörű motor dinamikus modelljét az alábbi elsőrendű differenciálegyenlet-rendszer alkotja:
|
|
(19.24) | |
|
|
(19.25) | |
|
|
(19.26) |


ahol  ,
,  a motor villamos és mechanikai együtthatói (gépállandó), és
a motor villamos és mechanikai együtthatói (gépállandó), és
|
J a |
– a forgórész tehetetlen nyomatéka | |
|
J l |
– a terhelés tehetetlen nyomatéka | |
|
T s |
– súrlódási forgató nyomaték | |
|
T l |
– a terhelés által generált súrlódási forgató nyomaték. |
A villamos kapun keresztül bevitt teljesítmény  , és itt feltételeztük, hogy az armatúra áramkörben
, és itt feltételeztük, hogy az armatúra áramkörben  .
.
Állandósult állapotban
|
|
(19.27) |

ahonnan
|
|
azaz az indító forgatónyomaték és a motor maximális szögsebessége
|
|


Ezért a forgatónyomaték-szögsebesség karakterisztika a
|
|
(19.28) |
formát ölti, míg az áramerősség-szögsebesség karakterisztika az
|
|
(19.29) |

alakú, amely a szögsebességnek uin tápfeszültséggel és Ra ellenállással való szabályozhatóságát mutatja. Természetesen itt nem az armatúra Ra adott ellenállásának a változtatására kell gondolni, hanem – ahogy ezt a 19.15. ábra szemlélteti – az armatúra áramkörbe beépített Rv pót-ellenállás értékének megfelelő modulálására.
A motor által leadott teljesítmény a
|
|
(19.30) |
képlettel fejezhető ki, és így a leadott teljesítmény maximumát az
|
|

szögsebességnél éri.
A (19.29) képletből jól látható, hogy – mivel az Ra ellenállás kicsi – az indító armatúra-áramerősség meglehetősen nagy, és ha (19.16. ábra) ábrán jelölt szögsebesség-áramerősség munkapontot szeretnénk elérni, akkor ez túlságosan nagy kezdeti és hosszantartó áramfelvétellel, ráadásul lassan lenne lehetséges. Felhasználva azonban, hogy egy egyenáramú motort rövid ideig túl lehet terhelni a nominális áramerősség felett akár 2.5-szeres erősségű árammal is, megfelelően megtervezett Rv változtatható ellenállás-sorral fel tudjuk gyorsítani az indítási folyamat a 19.16. ábra által bemutatott módon a szögsebesség-áramerősség karakterisztikának az
|
|
(19.31) |
összefüggés szerinti modulálásával.
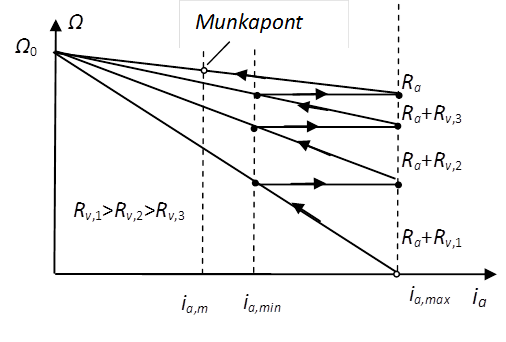
Itt az ia,min áramerősség-értéket elérve egy kapcsoló segítségével az  kapcsolásokat kell megvalósítani, ami az egyes karakterisztikák közötti ugrásszerű átmeneteket jelenti. A 19.16. ábra jól mutatja azt is, hogyan lehet a motor paramétereinek felhasználásával, valamint az ia,min és ia,max áramerősségek rögzítésével meghatározni a kapcsolások számát és az ellenállás-sor értékeit.
kapcsolásokat kell megvalósítani, ami az egyes karakterisztikák közötti ugrásszerű átmeneteket jelenti. A 19.16. ábra jól mutatja azt is, hogyan lehet a motor paramétereinek felhasználásával, valamint az ia,min és ia,max áramerősségek rögzítésével meghatározni a kapcsolások számát és az ellenállás-sor értékeit.
Jegyezzük még meg, hogy a mellékáramkörű egyenáramú motor fékezése is történhet ezen ellenállások felhasználásával az armatúra áramkör ellenkapcsolásával, vagy rövidre zárásával.
19.2.4. Tervezési példa 2: Lineáris elektromechanikai erőgép
Egy másik egyszerű, de nemlineáris rendszerként modellezett mechatronikai eszköz tervezését mutatjuk be, illusztrálva ezzel az általánosan megfogalmazott lépéseket és felhasználva az elektromechanikai Lagrange-egyenleteket.
Feladat: táv-irányítható, megfelelően nagy erősűrűséget biztosító erőgép modell-alapú tervezése, amely lineáris – transzlációs – mozgással alkalmas emelésre és kapcsolásra. Ehhez a gép matematikai modelljének kidolgozását és elemzését kell elvégezni az eszköz tulajdonságainak és működésének vizsgálata céljából.
19.2.4.1. A koncepció
A 19.17. ábra mutatja be az elektromechanikai eszköz koncepciójának vázlatos rajzát, amely egy rögzített vasmag-állórészből, a középső részen egy bronz betéttel, valamint egy mozgatható – mobil – vasmagból áll. Az állórész középső részén található N menetszámú tekercsen átfolyó i erősségű elektromos áram hatására a mobil vasmag kétirányú függőleges mozgást végezhet megfelelő mechanikai erőhatást kifejtve.
Induljunk ki abból a feltételezésből, hogy a vasmag mágneses permeabilitása nagyságrendekkel nagyobb a levegőrés mágneses permeabilitásánál, amely egyenlőnek vehető a bronzbetét permeabilitásával. Ugyanakkor tételezzük fel, hogy a – főleg a könyökökben fellépő – szórt mágneses fluxus mértéke elhanyagolható.
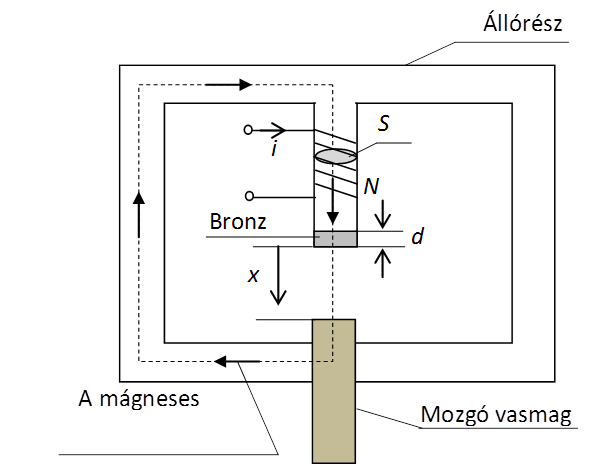
Az ok-okozati kapcsolatokat elemezve: ha a tekercsen elektromos áramot bocsátunk át, akkor az a vasmagok – levegőrés - bronzbetét mágneses körben megfelelő mágneses fluxust generál, és ez a mobil vasmagra történő erőhatással annak elmozdulását hozza létre. A mobil vas-mag transzlációs mozgása a mágneses térre történő indukciós visszahatást eredményezi, és ez adott feltételek esetén a két hatás egyensúlyához, azaz a mobil vasmag valamely helyzetben történő rögzülését jelentheti.
A modell kidolgozása során természetesen feltételezzük, hogy adottak a szükséges konstitutív mennyiségek, ami egyúttal azt is megmutatja, hogy a tervezendő rendszer előzetes vizsgálatát jelentő szimulációs vizsgálatokhoz milyen adatok szükségesek.
19.2.4.2. A mágneses tér leírása
A levegőrésben és bronzbetétben kialakuló mágneses mező térerősség-vektorát az Ampére- törvényből kapjuk meg
|
|
(19.32) |
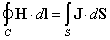
ahol a C a fluxus zárt középvonalát és az S felületet a 19.13. ábra értelmezi. Az ábra alapján figyelembe véve a geometriai viszonyokat a (19.32) egyenlet az egyszerű
|
|
(19.33) |

formában írható. Mivel a levegőrés és a bronzbetét mágneses térerősségét azonosnak tételeztük fel, ezért a mágneses indukció vektorát a
|
|
(19.34) |

kifejezéssel adhatjuk meg, és ezt a (19.33) egyenletbe behelyettesítve a
|
|
(19.35) |

kifejezést kapjuk, ahonnan a keletkezett fluxust a
|
|
(19.36) |

integrállal kapjuk meg. Itt az A a légrés és a bronzbetét, tehát a mágneses erővonalakra merő-leges felület területét jelenti. Így a kapcsolt fluxust a
|
|
(19.37) |
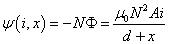
lineáris összefüggés adja meg.
A ψ fluxus változása az i áramerősség és a légrés x magassága, mint paraméter függvényében.
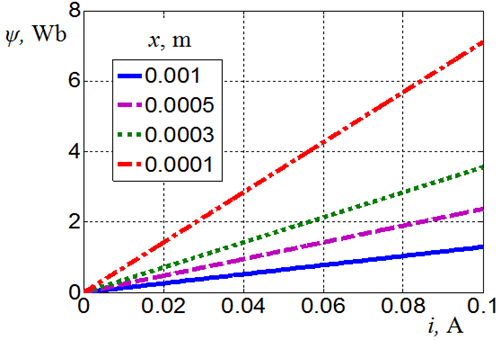
Az N-elemű tekercs kapcsolt fluxusának ismeretében a (19.17. ábra) ábrán bemutatott mágneses rendszert helyettesítő sémáját a (19.19. ábra) ábrán mutatjuk be.
A (19.37) fluxus-kifejezésből a mágneses koenergiát a
|
|
(19.38) |

integrállal kapjuk meg, ami a
|
|
(19.39) |
eredményt szolgáltatja.
A mágneses tér energiáját a (19.26) kifejezés inverzével számolhatjuk, amely az áramerősségre az
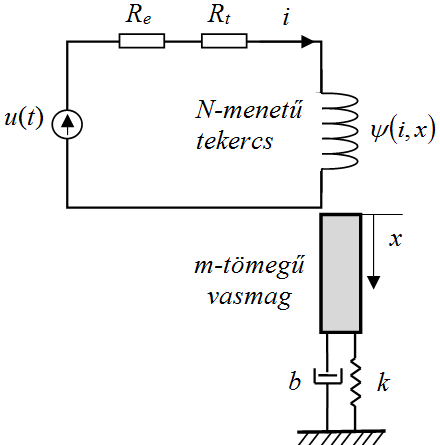
|
|
(19.40) |
összefüggést adja, és ennek alapján a
|
|
(19.41) |
integrállal az eredmény a
|
|
(19.42) |
alakú.
Ha a  töltésáramot behelyettesítjük a mágneses koenergia-állapotfüggvénybe azt kapjuk, hogy a koenergia és energia értékei egyenlők, azaz
töltésáramot behelyettesítjük a mágneses koenergia-állapotfüggvénybe azt kapjuk, hogy a koenergia és energia értékei egyenlők, azaz
|
|
(19.43) |

ami a (19.37) lineáris kapcsolat következménye. Könnyen belátható, hogy a mágneses energia és koenergia összegére az elvárható
|
|
(19.44) |

kifejezést kapjuk.
19.2.4.3. Matematikai modell: Mérlegegyenletek
Az erőmérlegeket az elektromechanikai Lagrange-egyenletekből határozzuk meg, melynek tagjai az alábbi kifejezésekkel adhatók meg.
A vizsgált rendszerben – a 19.19. ábra alapján – két általánosított koordinátát tudunk kijelölni: az egyik a mechanikai alrendszer x változója, míg a villamos alrendszer általánosított koordinátáját az i áramerősség, vagy a  töltésáram adja meg.
töltésáram adja meg.
Ezekkel a koordinátákkal a teljes elektromechanikai kinetikus energia a
|
|
(19.45) |
alakú, míg a teljes elektromechanikai potenciális energiát a
|
|
(19.46) |
függvény adja meg, mivel a rendszer villamos energiája zérus értékű, ui. nincs benne kapacitív energiatároló. Így tehát a Lagrange-függvény az
|
|
(19.47) |

formájú, a rendszer Rayleigh-féle disszipációs függvényét az
|
|
(19.48) |

forma, míg a külső elektromechanikai erőket együttesen az
|
|
(19.49) |
kifejezés adja meg.
Mindezen függvényeket felhasználva a mechanikai Lagrange-egyenletet a
|
|
(19.50) |

míg a villamos Lagrange-egyenletet a
|
|
(19.51) |

formában kapjuk meg.
Nem részletezve a matematikai levezetéseket az (19.50)-(19.51) egyenletekből a mechanikai erő-mérleget az
|
|
(19.52) |
míg a villamos töltés-mérleget a
|
|
(19.53) |

nemlineáris negyedrendű differenciálegyenlet-rendszer formájában kapjuk meg.
Írjuk fel a (19.53) egyenletet az áramerősség felhasználásával
|
|
(19.54) |

így a (19.52) és (19.54) egyenletekből álló harmadrendű differenciálegyenlet-rendszert kapjuk.
A rendszer mechanikai és elektromos erőmérlegeit tartalmazó modelljét tehát az (19.52) és (19.54) közönséges differenciálegyenletekből álló egyenletrendszer adja meg, melynek megoldását az
|
|
(19.55) |

kezdeti feltételekkel kell meghatározni.
19.2.4.4. A rendszer analízise
A rendszer állandósult állapotait az
|
|
(19.56) | |
|
|
(19.57) |
algebrai egyenletrendszerből tudjuk meghatározni, amiből az
|
|
(19.58) |

nemlineáris algebrai egyenlethez jutunk.
Az (19.58) egyenlet alapján ábrázolva az xs változót az us függvényében a rendszer karakterisztikáját állítjuk elő, amely a (19.20. ábra) ábrán látható. Ezt a karakterisztikát a K=1.28e-5 m/N, D=0.004 N s/m, a=μ0N2A/2, μ0=4πe-7 H/m, Re=120 Ω, m=5.00e-4 kg, N=1200, Rt=520 Ω, b=3.33e-4 m, g=9.81 m/s2, u=24 V értékekkel számoltuk.
A (19.20. ábra) ábrán látható karakterisztika meglehetősen komplex, melyen három jól elkülöníthető szakaszt figyelhetünk meg. Az us=0 értéknél is nyilván zérus, így a légrés a maximális xs=Kmg+b értéket veszi fel a két mechanikai erő, azaz a rugóerő és a gravitációs erő egyen-súlyánál. Ha bekapcsoljuk a feszültségforrást, a feszültség fokozatos növelésével csökken a légrés egészen az xs,max=2(Kmg+b)/3-d/3 értékig, amikor is a feszültség akármilyen kismértékű további növelése a légrés ugrásszerűen zérusra-váltását idézi elő. A mágneses erő hirtelen teljesen legyőzi a mechanikus erők ellenállását és a mobil vasmagot az állórészhez rántja. Ha ezt követően elkezdjük csökkenteni a feszültséget, akkor a mobil vasmag mozdulatlan marad egészen az  értékig, ahol helyzete ismét ugrásszerűen megváltozik és az us,c feszültségértéknek megfelelő légrés-helyzetbe ugrik, azaz a karakterisztika felső szakaszára ugrik vissza. A jelenség magyarázata – ahogy ezt a 19.16. ábra mutatja –, hogy az (us,c,us,max) feszültség intervallumon a szaggatott vonallal jelölt karakterisztika szakasz végig instabil állapotokból áll. Tovább csökkentve a feszültséget az us<us,c értékekre a légrés a negatív értéktartományba kerülne át – (19.20. ábra) ábrán ezt a tiltott szakaszt a pontozott görbe jelöli –, ami nyilván lehetetlen. Tehát a us,c feszültségértéknél a mágneses erő elengedi a mobil vasmagot és a megfelelő stabil állapotba ugrik át.
értékig, ahol helyzete ismét ugrásszerűen megváltozik és az us,c feszültségértéknek megfelelő légrés-helyzetbe ugrik, azaz a karakterisztika felső szakaszára ugrik vissza. A jelenség magyarázata – ahogy ezt a 19.16. ábra mutatja –, hogy az (us,c,us,max) feszültség intervallumon a szaggatott vonallal jelölt karakterisztika szakasz végig instabil állapotokból áll. Tovább csökkentve a feszültséget az us<us,c értékekre a légrés a negatív értéktartományba kerülne át – (19.20. ábra) ábrán ezt a tiltott szakaszt a pontozott görbe jelöli –, ami nyilván lehetetlen. Tehát a us,c feszültségértéknél a mágneses erő elengedi a mobil vasmagot és a megfelelő stabil állapotba ugrik át.
Mindezt igazolhatjuk a (19.52)-(19.54) nemlineáris rendszer állapotainak stabilitás vizsgálatával, amit az (xs,is) állandósult állapot körül linearizálással és a Routz-Hurwith kritérium alkalmazásával érhetünk el.
A linearizálást a nemlineáris tagok Taylor-sorba fejtésével és csak a lineáris tagok meg-tartásával érjük el. Bevezetve az  és
és  jelöléseket, a lineáris modellt
jelöléseket, a lineáris modellt
|
|
(19.59) | |
|
|
(19.60) |


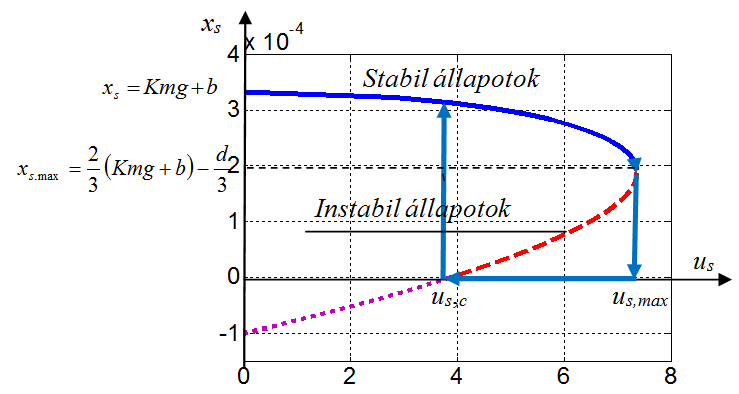
egyenletek alkotják, ahonnan a rendszer Jacobi-mátrixa a
|
|
(19.61) |
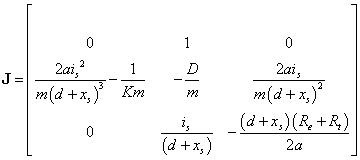
formájú.
Az állandósul állapotokra vonatkozó (19.56)-(19.57) egyenletekből a 19.20. ábra karakterisztikájának felső szakaszához tartozik az xs=2.6089e-4 és is=8.5697e-4 állapot, melyet a (19.61) Jacobi-mátrixba behelyettesítve λ1=-4.0151+j 1.2488e4, λ2=-4.0151-j 1.2488e4 és λ3=-1.6205e1 három sajátértéket kapjuk, ami az állapot stabilitását igazolja.
Hasonlóan kapjuk az xs=9.4354e-5 és is=9.9565e-3 állapotra, amely a 19.20. ábra karakterisztikájának középső, szaggatottan ábrázolt szakaszához tartozik, és ezt behelyettesítve a Jacobi-mátrixba az eredményt a λ1=1.2747e1, λ2=-1.4741e1+j 1.2488e4 és λ3=-1.4741e1-j 1.2488e4 sajátértékek szolgáltatják. Tehát az első valós sajátérték pozitív, így ez az állapot instabilis.
Végezetül nézzük az xs=0 tengelyen fekvő karakterisztika szegmenshez tartozó xs=0 és is=3.6617e-5 állapot esetében a három sajátértéket. Ezek a λ1=-3.9926+j 1.2488e4, λ2=-3.9926 –j 1.2488e4 és λ3=-4.5021 értékek, azaz ismét stabilis állapotot kaptunk.
Ezek az eredmények azt illusztrálják, hogy a vizsgált rendszerben egy állapot-hiszterézis fordul elő, ahol két stabil állandósult állapot-szakasz között egy instabil állapot-szakasz található, aminek az eredménye, hogy különböző kezdeti feltételekből indítva az eszköz az alsó, légrés nélküli állapotba, vagy a felső, határozott méretű légrés helyzetbe, vagy munkaállapotba kerülhet.
Szakirodalom
[19.1.] Introduction to Mechatronics and Measurement Systems. McGraw-Hill. Boston . 2003.
[19.2.] The Mechatronics Handbook. CRC Press. Boca Raton, Washington, D.C . 2002.
[19.3.] Systems Engineering and Analysis. Prentice Hall. Upper Saddle River. New Jersey . 1998..
[19.4.] Bond graph modelling and simulation of multidisciplinary systems – An intro-duction. Simulation Modelling Practice and Theory.
[19.5.] Matematikai kézikönyv. TypoTEX Kiadó. Budapest . 2000.
[19.6.] Continuous System Modeling. Springer-Verlag. New York . 1991.
[19.7.] Holistic system modeling in mechatronics. Mechatronics. pp.166–175.. 2011.
[19.8.] Mechatronics by Bond Graphs. An Object-Oriented Approach to Modelling and Simulation. Springer-Verlag. Berlin . 2003.
[19.9.] A design paradigm for mechatronic systems http://dx.doi.org/10.1016/j.mechatronics.2012.08.004. Mechatronics. 2012.
[19.10.] The Nature of Mathematical Modeling. Cambridge University Press. Cambridge, UK . 1999.
[19.11.] Mechatronic systems—Innovative products with embedded control. Control Engineering Practice. pp.14–29.. 2008.
[19.12.] Principles of Electromechanical Energy Conversion. McGraw Hill. New York . 1966.
[19.13.] Mechatronics. Principles and Applications. Elsevier Butterworth-Heine-mann. Amstredam . 2005.
[19.14.] On conceptual design of intelligent mechatronic systems. Mechatronics. pp.1029–1044.. 2003.
[19.15.] Elméleti villamosságtan. Tankönyvkiadó. Budapest . 1967.
[19.16.] Villamosságtan. Akadémiai Kiadó. Budapest . 1973.
[19.17.] Design with Microprocessors for mechanical Engineers. McGraw-Hill. New York . 1992.
[19.18.] A proposed approach to mechatronics design education: Integrating design methodology, simulation with projects http://dx.doi.org/10.1016/j.mechatronics.2012.10.002. Mechatronics (2012).
FÜGGELÉK
A komplex mechatronikai rendszerek modellezésével foglalkozó munkát szervesen egészíti ki a hőtani és áramlástani rendszerek modellezését bemutató összeállítás.
Az 1. fejezetben említettük, hogy a „klasszikus” mechatronikai rendszerek, különösen az elektrodinamikus átalakítók dinamikai modellezéséből sok esetben nem lehet kihagyni a termikus kölcsönhatások figyelembe vételét. A Függelékben található termodinamikai modellezések egyike éppen a villamos vezetőben fellépő hővezetés és hőátadás problémájával foglalkozik.
A Függelék további alfejezetei a folyamatok méréstechnikájának két fontos területét, az áramlásmérést és a hőmérsékletmérést mutatják be, gyakran előforduló műszaki problémákon. Az áramlási modellezés, különösen a mérőperem körül kialakuló áramlási viszonyok vizsgálata, szervesen egészíti ki a 13. fejezetben található szervopneumatikus rendszernél felvetett problémákat. A valós rendszerek üzemeltetése során gyakran fontos a megfelelő térfogatáram fenntartása. A folyamatos technológiák működésétől, a csővezetékekben történő szállításig, a gyártó technológiák szinte minden területén megjelennek áramlásmérő berendezések. Többféle módon mérhetünk térfogatáramot, vagy áramlási sebességet. Léteznek az áramlási sebességet mérő műszerek, amelyek pontban, vagy síkban képesek a sebességértékek mérésére, továbbá a turbinás áramlásmérők egy speciálisan kialakított forgó elem segítségével mérik a térfogatáramot. A leggyakrabban használt módszerek a keresztmetszet változás kihasználásával működnek. A keresztmetszet változásával változni fog a sebesség, ez pedig a nyomás változásának mérésével jól nyomon követhető. A mérőperemek az áramlási sebesség mérésére szolgáló berendezések közé tartoznak. Ilyen mérőperem környezetében kialakuló áramlási viszonyok modellezését találjuk meg az egyik alfejezetben.
A másik téma egy csőszigetelés vastagsága hatásának vizsgálata az áramló közeg hőmérsékletprofiljaira a csővezetékben. A leképezett geometria belső része megegyezik az előző feladatban tárgyalt cső méreteivel. Ehhez adunk hozzá egy szigetelést, amit kerámiaként definiálunk.
A szabályozástechnika egyik legfontosabb segédtudománya az időben változó mennyiségek mérésével foglalkozó un. folyamatmérés. A Függelékben arra is találunk példát, hogy a hőmérő szenzort egy áramló közeg hőmérsékletének mérésére milyen módon kell elhelyezni ahhoz, hogy a mérési eredmények a legkisebb bizonytalansággal tükrözzék a valós folyamatot. Az ipari méréstechnikában hőmérő elhelyezés kapcsán ismert, hogy a hőmérő szenzort az áramlással szemben kell elhelyezni, lehetőleg minél mélyebben az áramló közegbe, ezért jellemzően csőkönyökökben szokták ezeket a hőmérőcsonkokat kialakítani.
A. függelék - Mechatronikai rendszerek hőtani és áramlástani modellezése
- A.1. Bevezetés
- A.2. Bevezetés a CM program használatába
- A.3. Felhasználó által definiált közönséges differenciálegyenlet-rendszer megoldása
- A.4. Hővezetés és hőátadás folyamatok hatásának vizsgálata egy szilárd test hőmérsékletének alakulására
- A.5. Vezetősínben kialakuló hőmérsékleti kép meghatározása (Joule törvény)
- A.6. Mérőperemben kialakuló áramlás vizsgálata
- A.7. Csőszigetelés vastagságának vizsgálata
- A.8. Hőmérő elhelyezés vizsgálata
A.1. Bevezetés
A még manapság is gyorsan fejlődő informatika lehetőséget teremt arra, hogy azon szimulációs technikák is a mindennapi mérnöki munka részéve váljanak, amelyek összetettebb geometriákban, komplex folyamatok viselkedésének időbeli lefutását is képesek megbízhatóan meghatározni. Az ilyen rendszerek vizsgálata esetén, már nincs szükség, vagy lényegesen kevesebb egyszerűsítés bevezetésére van szükség, mint ha a rendszer viselkedésére a klasszikus tökéletesen kevert egység, vagy az ideális kifolyású cső megközelítésmódokat alkalmaznánk.
A numerikus áramlástan (Computational Fluid Dynamics – CFD) az informatikával párhuzamosan fejlődött, fejlődik. Az utóbbi néhány évtizedben, ahogy a számítógépek már az életünk mind több területén megjelentek, lehetővé vált, hogy közönséges asztali számítógépeken is végezzünk CFD számításokat. A tudomány területhez kapcsolódóan született publikációk, mind az alkalmazási példák növekvő száma azt mutatja, hogy egy dinamikusan fejlődő területről van szó, amely egyre nagyobb teret hódít meg magának.
A következőkben egy nagyon rövid bemutatót adunk egy olyan jellegű szoftver alkalmazásához, mely CFD számítások elvégzésére is alkalmas, ez a COMSOL Multiphysics (CM). Egyszerű példákon keresztül kívánjuk megismertetni az olvasóval a szoftver alkalmazásának alapjait, de nem célunk a szoftver által használt, véges elemek módszerének részletes bemutatása, sem a transzport folyamatok alapjainak ismertetése. A választott példák elsősorban a mechatronikai rendszerekben lejátszódó hőtani és áramlástani jelenségek matematikai leírására és a kidolgozott modellek alapján elvégzett szimulációs vizsgálatok elvégzésére fókuszál.
A.2. Bevezetés a CM program használatába
A CM egy olyan szoftver, amely a CFD tudományterülethez tartozó mérlegegyenletekkel (főleg impulzusmérlegek), összefüggésekkel való számítások mellett, lehetőséget nyújt más jelenségek (anyag- és energiatranszport) folyamatok együttes vizsgálatára, összetett geometriák esetén is.
A legtöbb szimulációs szoftverhez hasonlóan, CM programban is, három részre bonthatjuk a problémamegoldás menetét:
Modellalkotás – vagy a felhasználó által definiált összefüggésekből, vagy az egyes jelenségek leírására alkalmas előredefiniált összefüggésekből, a probléma megoldásához szükséges modell felépítése. A matematikai modell megalkotását természetesen meg kell előzze a geometriai modell elkészítése. A modellalkotás folyamata a modellegyenletekben szereplő paraméterek (elsősorban a fázisok fizikai tulajdonságai), illetve a modell megoldásához szükséges peremfeltételek rögzítésével fejeződik be.
Modell megoldás – szimuláció lépésben a geometriai és matematikai modell elemzését követően véges számú elemre kell felosztani a definiált geometriát, azaz el kell végezni a diszkretizálást. A modellek elemzését a megoldás megbízhatósága szempontjából rendkívül körültekintően kell elvégezni, melynek során a vizsgált geometria azon részeiben, ahol a számítás elvégzését kritikusabbnak érezzük, a diszkretizálás során kisebb részekre való felosztást javasolt alkalmazni. A diszkretizálási lépést követően a szimulációs lépés következik, ahol a definiálnunk kell, hogy milyen szimulációs vizsgálatot, vizsgálatokat kívánunk elvégezni a létrehozott modellen.
Kiértékelés – mint minden szimulációs szoftverben, a CM programban is nagy hangsúlyt fektettek az eredmények hatékony kiértékelésére. A táblázatok, 2D-s és 3D-s ábrák készítése mellett, lehetőségünk van animációk készítésére is néhány kattintást követően. Az így kapott eredmények természetesen dokumentumokba is könnyen átemelhetők.
Az ismertetőben található példák a COMSOL Multiphysics 4.3.0.151 verziójával készültek.
A.3. Felhasználó által definiált közönséges differenciálegyenlet-rendszer megoldása
A CM program kezelőfelülete három főrészre osztható, ahogy az lejjebb (A.1. ábra) is látható, balról jobbra haladva ezek a következők:
Egy fastruktúrában (Model Builder) kerülnek megjelenítésre az elkészített modellek, a definiált vizsgálatok, illetve a kiértékelés fázisban létrehozott ábrák, táblázatok. A felhasználó által létrehozott összetett program struktúrában való hatékony navigálást teszi lehetővé.
Függően attól, hogy a fastruktúrának mely részét jelöltük ki, itt van lehetőség az általunk gondolt összefüggések, paraméter értékek megadására, a korábbi beállításaink módosítására, illetve a megalkotott matematikai vagy geometriai modell bővítésére, esetleg új vizsgálatok definiálására, ábrák készítésére.
Tovább bontható két részre, ahol a felső rész az ahol a létrehozott geometriai modell, illetve a számítások grafikus eredménye megjelenik. Itt is van lehetőségünk a geometriai modell manipulálására, ahol a geometria szerkesztésére navigálva megjelenő menüsorból tudjuk a legmegfelelőbb alakzatokat kiválasztva szerkeszteni a leképezett geometriát. Az alsó rész egy információs rész, ahol a program által felhasználónak küldött üzeneteket láthatjuk (Messages), az éppen futó szimuláció készültségi fokát követhetjük nyomon (Progress), a program által rögzített fontosabb információkat tekinthetjük meg (Log), illetve ha numerikus értékeket számoltatunk ki a programmal, azok jelennek meg itt (Results).
A program menüsora teljesen le van egyszerűsítve, és csak a más programokban is jól megszokott alapfunkciók kapnak itt helyet (pl. fájlok megnyitása, segítségkérés, program beállítások, stb.).
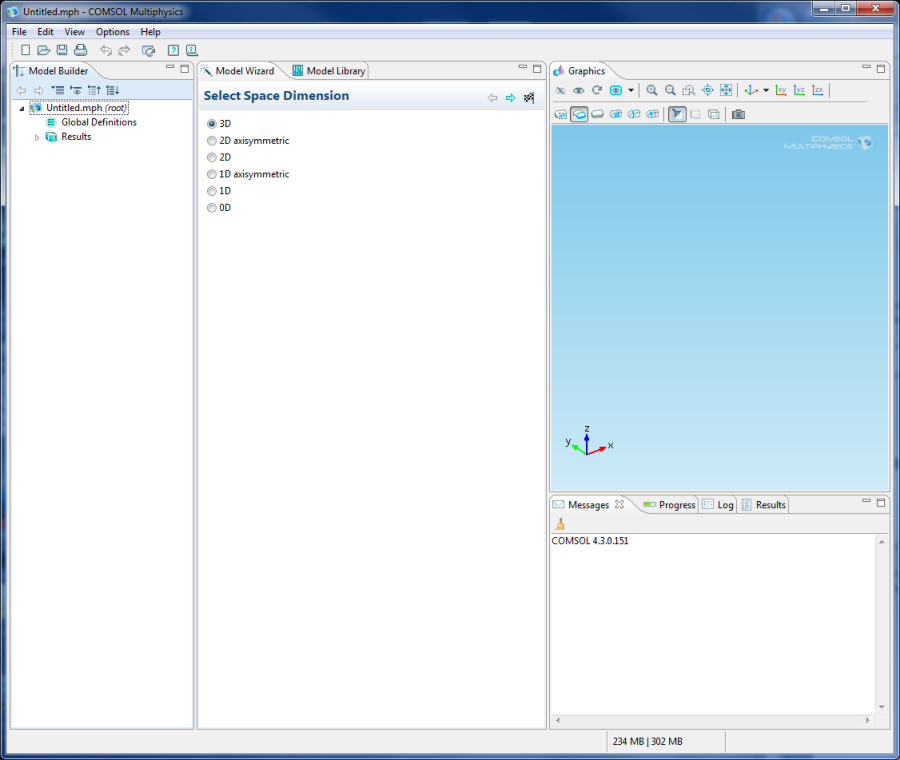
Annak érdekében, hogy elkezdjük az ismerkedést a programmal tekintsük az alábbi közönséges differenciálegyenleteket tartalmazó egyenletrendszert:
|
|
(A.1) | |
|
|
(A.2) | |
|
|
(A.3) |



Ezek az ún. Lorenz egyenletek, melyekben a σ=10; ρ=29; β=8/3 paraméterkészletet alkalmazva egy kaotikus viselkedés figyelhető meg. A fenti modell, az állapotváltozók csak az időbeli megváltozását írják le, azaz a teret homogénnek tekintik. Így ezen egyszerű példa esetén nincs szükség geometria megalkotására. Ez azt is jelenti, hogy a program által kínált hat lehetőség közül, melyek felülről lefelé haladva az alábbiak:
a modellezett objektum geometriája három dimenzióban kerül leképezésre (3D), nem használjuk ki, vagy nem tudjuk kihasználni a geometriában lévő szimmetria viszonyokat (koordináták: x, y, z);
a modellezett objektum hengerszimmetrikus (2D axisymmetric), s ezt kihasználva egyszerűsítjük a geometriai modellt (koordináták: r, x);
az objektum viselkedését egy síkban vizsgáljuk így annak geometriája két dimenzióban kerül leképezésére (koordináták: x, y);
a modellezett objektum gömbszimmetrikus (1D axisymmetric), s ezt kihasználva csökkentjük a térkoordináták számát (koordináták: r);
az objektum viselkedését csak egy koordináta mentén vizsgáljuk (1D), a többi koordináta mentén nem vesszük figyelembe az állapotváltozók alakulását (koordináták: x);
nincs geometriai modell (0D), a térben homogénnek tekintjük az objektumot (koordináták: -);
ebben az esetben a 0D beállítás kiválasztására van szükség. A modellalkotás következő lépésére, a kezelőfelült középső részének tetején található jobboldalra mutató kék nyíl segítségével ugorhatunk. Függetlenül attól, hogy mely dimenziót választottuk, a térkoordináták mellett, a modellegyenletekben szereplő független változók számát az idő is növeli, amennyiben dinamikus vizsgálatot végzünk.
Mivel ez esetben nem az előre definiált összefüggések közül építenénk fel a matematikai modellt, ezért a geometria kiválasztását követően Mathematics/ODE and DAE Interfaces/Global ODEs and DAEs útvonalon a kiválasztott összefüggésekhez (Selected Physics) adjuk hozzá az összefüggést a pluszjelre kattintva (vagy két a bal egérgombra kattintással az összefüggésre). Az ODE az Ordinary Differential Equation, azaz a közönséges differenciál egyenletek jelöli, míg a DAE a Differential Algebric Equation, azaz a differenciál algebrai összefüggéseket. A két kifejezés gyakorlatilag ugyanazt jelenti, csak az egyenletek formalizálásában különböznek az összefüggések.
Az összefüggés hozzáadását követését követően a nyíl segítségével továbbléphetünk az elvégzendő vizsgálat kiválasztására, amely ez esetben, mivel a felírt differenciálegyenletek a rendszer időbeli viselkedését írják le, dinamikus szimuláció (Time Dependent) lesz. Ezt kiválasztva kattintsunk a nyilak mellett lévő kockás zászlóra, így befejezve a modellalkotás első lépéseit. Amennyiben mindent megfelelően végeztünk, Model 1 és Study 1 jelent meg a struktúrában. A Model 1 pont alatt láthatjuk a modellben lévő összefüggés(eke)t, amennyiben újabb egyenletekkel akarjuk bővíteni a modellünk, úgy a Model 1 pontra jobb egérgombbal kattintva megjelenő menüben, az Add Physics menüponttal tehetjük ezt meg.
A következő lépés a differenciálegyenlet-rendszer leképezése a programba. Ehhez kattintsunk először Model 1/Global ODEs and DAEs/Global Equations 1 pontra a struktúrán belül. Az így megjelenő táblázatban tudjuk rögzíteni az összefüggéseinket differenciál algebrai egyenletek formájában, ennek megfelelően írjuk fel a modellegyenleteket:
|
|
(A.4) | |
|
|
(A.5) | |
|
|
(A.6) |


A táblázat első oszlopába az egyes összefüggésekből számítható változók nevét írjuk be, azaz sorrendbe x, y, z változókat. A táblázat második oszlopába írjuk be az (A.4-A.6) egyenleteket olyan formában, hogy ahol elsőrendű differenciálhányados szerepel, ott az adott változó neve mellé egy darab t-betűt, míg a másodrendű differenciálhányados esetén két darab t-betűt tegyünk. A táblázat harmadik oszlopába pedig az egyes differenciálegyenletek megoldásához megadott kezdeti értékeket rögzítsük. Amennyiben mindent helyesen írtunk be a táblázatnak az alább (A.2. ábra) látható módon kell kinéznie. Az így létrehozott modellegyenleteket a táblázat alatt lévő ikonok közül az utolsóra kattintva egy txt-fájlba menthetjük, s egy másik modellbe betölthetjük azokat, az utolsó előtt ikonra kattintva.
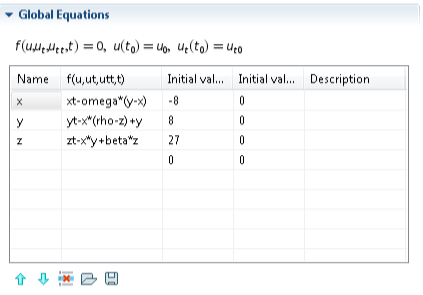
A modell megoldása előtt szükség van a modellparaméterek rögzítésére, ehhez a struktúrában kattintsunk a jobb egérgombbal a Global Definitons pontra, az így megjelenő menüben pedig válasszuk ki a Parameters menüpontot. Az így megjelenő táblázatba tudjuk felvenni a modell paramétereket, azok nevének (Name), illetve a számításukhoz szükséges összefüggések (Expressions) rögzítésével. Lehetőségünk van a létrehozott paraméterkészlet mentésére, illetve betöltésére is, hasonlóan az egyenletek esetén korábban már megismertekhez hasonlóan. Itt fontos megemlíteni, hogy a program lehetőséget ad, az egyes paraméterek mértékegységének megadására, ezt úgy tudjuk megtenni, hogy az összefüggés megadását követően egy szóköz kihagyásával szögletes zárójelben megadjuk az adott értékhez tartozó mértékegységet. A program a megadott mértékegységnek megfelelően fogja kezelni az értéket későbbiekben. A felvett paraméterek alább (A.3. ábra) láthatók.
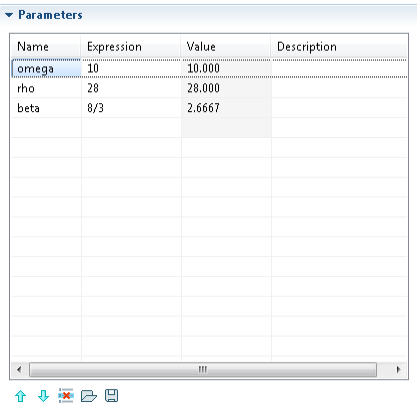
A modellalkotás fázisát befejeztük, s következhet a modell megoldása. Ennek érdekében a Study 1/Step 1: Time Dependent menüpontra kattintva a struktúrában adjuk meg a szimulációs időt, illetve, hogy mely időpillanatokban szeretnénk eredményeket kapni (Times). Esetünkben 100 s-ig végezzük a szimulációt és 0,1 s-ként akarunk eredményeket kapni. A range parancs argumentumának átírásával (range(0,0.1,100)), vagy a Times mellett lévő gombra (![]() ) kattintva megjelenő ablakban (lsd. A.4. ábra) adhatjuk ezt meg.
) kattintva megjelenő ablakban (lsd. A.4. ábra) adhatjuk ezt meg.
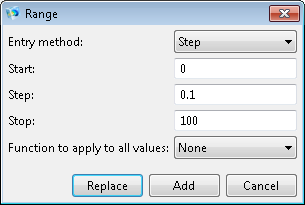
Ezt követően vagy az F8 gomb megnyomásával, vagy a program felső menüsorában megjelenő zöld egyenlőségjelre kattintva indíthatjuk a számítást. Amennyiben lefut a szimuláció a program automatikusan létrehoz egy ábrát (lsd. A.5. ábra), a három állapotváltozó időbeli alakulásának bemutatására.
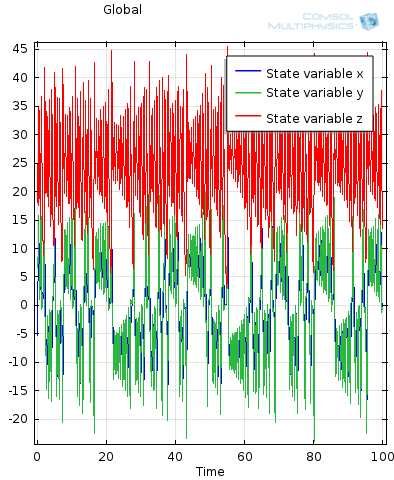
Látványosabb ábrák hozhatók létre, ha egy fázistérben mutatjuk be a rendszer viselkedését, ehhez x változó függvényében ábrázoljuk az y és z változókat. Ezt úgy tudjuk megtenni, hogy Results/1D Plot Group 1/Global 1 pontra kell kattintanunk a struktúrában. Itt először töröljük az y-tengelyhez rendelt adatsorok (y-Axis Data) közül az x változónkat (mod1.x – ahol mod1 a kidolgozott modell azonosítója) listából. Törölni a táblázat alatt lévő utolsó ikonnal tudunk. Változókat rendelni az y-tengelyhez pedig, vagy a változó nevének a táblázatban való megadásával, vagy a táblázat felett lévő két ikon valamelyikének megnyomását követően, a változókat tartalmazó listából kiválasztva.
Az x-tengely adatsorát (x-Axis Data) alatt tudjuk megtenni, a legördülő menüben az idő (Time) helyett válasszuk ki az összefüggést (Expression). Ezt követően rögzítsük a kifejezést, esetünkben ez mod1.x. Ha ezzel végeztünk vagy az F8 gomb megnyomásával, vagy a ![]() gombra kattintva frissíthetjük az ábrát. Amennyiben az eredmények kigyűjtésének lépésközét 0,01 s-re csökkentjük és frissítjük az előzőekben készített fázis diagramot, akkor az alább (A.6. ábra) látható görbéket kapjuk.
gombra kattintva frissíthetjük az ábrát. Amennyiben az eredmények kigyűjtésének lépésközét 0,01 s-re csökkentjük és frissítjük az előzőekben készített fázis diagramot, akkor az alább (A.6. ábra) látható görbéket kapjuk.
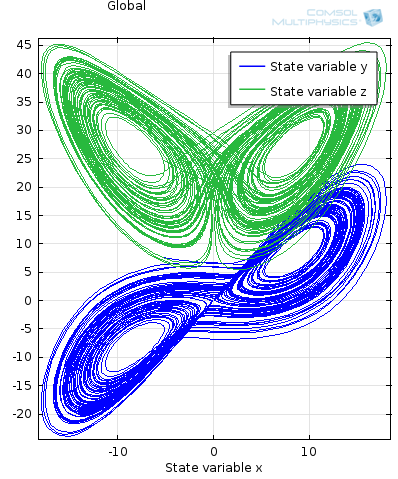
A.4. Hővezetés és hőátadás folyamatok hatásának vizsgálata egy szilárd test hőmérsékletének alakulására
Ebben a fejezetben az alább (A.7. ábra) látható keresztmetszeti profillal rendelkező, szilárd testben kialakuló hőmérsékleti kép meghatározása a célunk. Feltételezzük, hogy a test kellően hosszú, s ennek folytán eltekinthetünk a test két végén lejátszódó folyamatok hatásától. Ennek eredményeképpen elegendő a test keresztmetszete mentén kialakuló hőmérsékleti kép számítására, ugyanis a feltételezés szerint, ez nem változik jelentősen a test hossza mentén.
A világos kék számok (A.7. ábra) jelölik a vizsgált alakzat főbb méreteit centiméterben, míg a többi színes szám az azonos színű peremek azonosítására szolgál. Az objektum belső kialakítása fiktív, amelynek a sötétebb része rézből, a világos körök szilika üvegből készült, míg a középső kisebb körben pedig telített gőz áramlik. Az peremfeltételek (Táblázat A.1) kerültek összefoglalásra.
|
Peremcsoport |
Peremfeltétel |
|---|---|
|
1 |
Állandó falhőmérséklet – 310 K |
|
2 |
Hőszigetelés - nincs hőtranszport a környezet felé, jQ=0W/m2 |
|
3 |
Van hőtranszport a környezet felé, jQ=500W/m2K·(293K−T) |
|
4 |
Állandó falhőmérséklet – 360 K |
|
5 |
A két szerkezeti anyag hőmérséklete megegyezik |
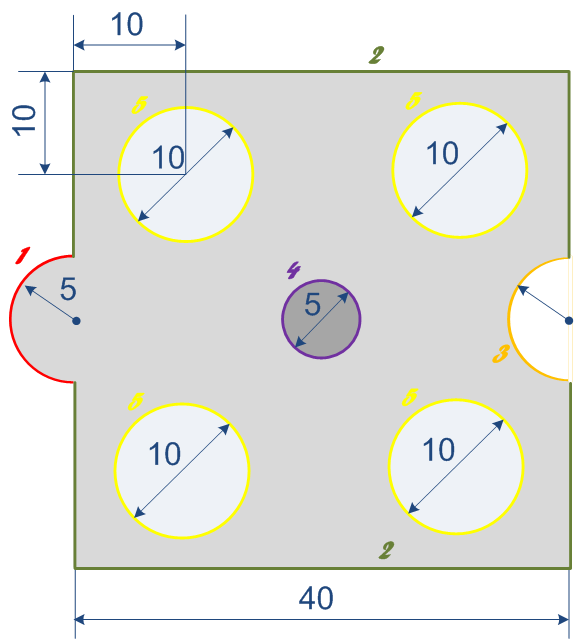
Mielőtt rátérnénk a modellalkotásra, nézzük meg részletesebben a peremfeltételeket (Táblázat A.1). A vizsgált objektum az 1-es peremcsoporton keresztül érintkezik közvetlenül a környezettel, amelynek végtelen hőkapacítása miatt, ezen perem mentén nem változik a környezet hőmérséklete. Az itt indukálódó hőátadási folyamat sebessége végtelen, így a perem mindkét oldalán azonos a hőmérséklet. A 3-as peremcsoporton ezzel szemben, nem végtelen nagy a transzport folyamat sebessége, de a környezet hőkapacítása itt is végtelen, ezért annak hőmérséklete itt sem változik. Az itt felírt hőátadási áramsűrűség első tagja a hőátadási tényező, amely azt adja meg, hogy egységnyi felületen, egységnyi hőmérsékletkülönbség hatására, mekkora hőáram indukálódik. A második tag ebben a szorzatban pedig a hajtóerő, amely hőátadási folyamat esetén a perem két oldalán kialakuló hőmérsékletek különbsége.
A 2-es peremcsoport mentén tökéletesen szigetelt az objektum, amely megakadályozza, hogy ezen peremeken keresztül hőáram indukálódjon az objektum környezete felé. A 4-es peremcsoport esetén ugyanazokat a megfontolásokat tehetjük, mint az 1-es peremcsoport esetén tettünk. Ez esetben azonban az állandó hőmérsékletet úgy is elképzelhetjük, hogy az itt felszálló telített gőz csak kondenzálódik, és emiatt nem változik jelentősen a hőmérséklete. Az 5-ös peremcsoporton érintkezik a két szerkezeti anyag közvetlenül, így ezen peremen nem lehet szakadás a hőmérsékleti profilban, ennek megfelelően a perem két oldalán a hőmérsékletet egyenlővé kell tennünk.
A vizsgált geometria (pl. A.7. ábra) kétdimenziós (2D), így a dimenzió megválasztásánál ezt válasszuk. Annak érdekében, hogy a hőmérséklet alakulását kiszámítsuk egy szilárd testben, olyan hőmérleg felvételére van szükség a modellbe, amelynek a makroszkopikus mozgás okozta hőtranszport folyamat, a konvektív hőáram matematikai leírása nem része:
|
|
(A.7) |

ahol  a hővezetési hőáramsűrűség, ami a Fourier-törvény szerint:
a hővezetési hőáramsűrűség, ami a Fourier-törvény szerint:
|
|
(A.8) |

A geometria kiválasztását követően a Heat Transfer/Heat Transfer in Solids összefüggést kiválasztva adjuk hozzá az előbbi hőmérleget a modellhez. Jelen példában stacioner vizsgálatot akarunk elvégezni, így a következő lépésben a Stationery vizsgálatot válasszuk ki és fejezzük be a modellalkotás előkészítését. Az első példához képest annyi változott a modell struktúrában, hogy ezen példa esetén szükség van egy geometriai modell kidolgozására is, ezért a struktúrában megjelent a Geometry 1 pont. Emellett megjelent a Materials pont is, ahol az egyes tartományokhoz tudunk majd anyagokat rendelni a CM program adatbázisából, illetve saját magunk is definiálhatunk itt új anyagokat.
Jobb egérgombbal a Geometry 1 pontra kattintva válasszuk ki a négyzetet (Square) az előbukkanó menüből. Ennek eredményeképpen a geometriai modell bővül egy elemmel, amely méretét (Size), valamely kitüntetett pontjának pozícióját (Position), illetve elforgatásának szögét (Rotation) tudjuk megadni. Esetünkben, az A.7. ábra alapján, a négyzet oldalainak hossza 0,4 m, a bal alsó sarkának pozíciója pedig (0, 0). Ezen értékek rögzítését követően vagy az éppen kijelölt geometriai alakzatot (Build selected), vagy a teljes geometriai modellt (Build all) ábrázolhatjuk a rajzfelületre. Az alábbi táblázatban (Táblázat A.2) lévő alakzatokat adjuk hozzá a geometriai modellhez.
|
Alakzat |
Méret |
Pozíció |
Azonosító |
|---|---|---|---|
|
Négyzet |
l = 0,4 m |
Bal alsó sarok (0, 0) |
sq1 |
|
Kör |
r = 0,05 m |
Középpont (0, 0,2) |
c1 |
|
Kör |
r = 0,05 m |
Középpont (0,4, 0,2) |
c2 |
|
Kör |
r = 0,025 m |
Középpont (0,2, 0,2) |
c3 |
|
Kör |
r = 0,05 m |
Középpont (0,1, 0,1) |
c4 |
|
Kör |
r = 0,05 m |
Középpont (0,3, 0,1) |
c5 |
|
Kör |
r = 0,05 m |
Középpont (0,1, 0,3) |
c6 |
|
Kör |
r = 0,05 m |
Középpont (0,3, 0,3) |
c7 |
Az Táblázat A.2 utolsó oszlopában az egyes alakzatokhoz CM által automatikusan hozzárendelt azonosítókat láthatjuk (lsd. Geometry 1/Square (sq1)). Ezt követően végezzük el az alábbi Boolean-műveleteket:
képezzük a különbségét az sq1 és c2, c3 alakzatoknak, ehhez nyomjunk jobb egérgombot a Geometry 1 pontra, majd a menüben válasszuk ki a Boolean Operations/Difference menüpontot. A felső ablakhoz adjuk hozzá a négyzetet (sq1), az alsó ablakhoz pedig a jobbszélső (c2), illetve a négyzet közepén lévő (c3) kört. Az így létrejövő alakzat azonosítója dif1 lesz.
képezzünk úgy uniót az uni1 és c1 alakzatok között, hogy a belső peremeket nem tartjuk meg, ehhez az unióképzésnél (Boolean Operation/Union) vegyük ki a kijelölést a Keep interior boundaries sor elől. Az így létrejövő alakzat azonosítója uni1 lesz.
képezzünk uniót az uni1, c4, c5, c6, c7 alakzatok között a belső peremek megtartásával. Az így létrejövő alakzat azonosítója uni2 lesz.
Amennyiben a fentieknek megfelelően jártunk el, akkor az alább (A.8. ábra) látható alakzatot kapjuk eredményül.
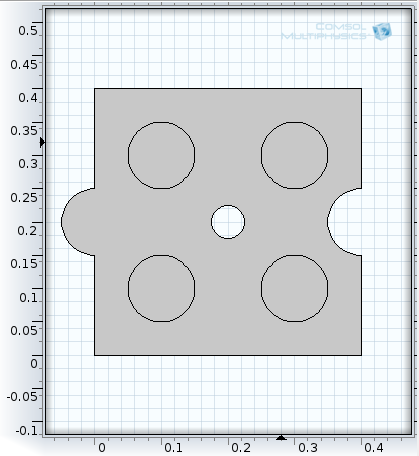
A geometria elkészítését követően, ahogy az fentebb (A.8. ábra) is látható, hogy öt tartományt (Domain) különböztethetünk meg, ezeket a program számokkal azonosítja (esetünkben 1-től, 5-ig). Ezekhez a Model 1/Materials pontra jobb egérgombbal kattintva, a CM adatbázisából rendeljünk hozzá anyagokat (Open Material Browser). Az adatbázisból (Built in), keressük ki a rezet (Copper) és a szilika üveget (Silica Glass), majd adjuk ezeket hozzá a modellhez (Add Material to Model). Miután az anyagok megjelentek a modellstruktúrában az anyagok alatt, hozzá kell ezeket rendelni a megfelelő tartományokhoz.
A rezet az 1-es, a szilika üveget pedig a többi tartományhoz kell rendelnünk, ennek érdekében töröljük a réz anyag hozzárendelései közül a 2-5 tartományokat, a szilika üveg anyag esetén pedig rendeljük ezeket hozzá. Amennyiben az egyes hozzáadott anyagok tulajdonságát módosítani szeretnénk, arra is itt van lehetőség. A program zöld pipával jelöli az anyag azon tulajdonságait, amely a tartományhoz való hozzárendelést követően, a modellben szereplő paraméterek megadásához szükséges. Abban az esetben, ha van olyan modell paraméter, amely nem áll rendelkezésre a tartományhoz rendelt anyag esetén, úgy azt a program a hiányzó paraméter megadásával fogja jelezni ezen a ponton. A modellbe épített hőmérleg esetén, a közeg hővezetési tényezőjének (Thermal conductivity – k), hőkapacításának (Heat capacity at constant pressure - cp) és sűrűségének (Density - ρ) megadására van szükség, amely látható, hogy mindkét kiválasztott anyag esetén rendelkezésre áll.
Miután minden tartományhoz rendeltünk anyagokat, amelyben rendelkezésre állnak a szükséges modell paraméterek, így ezek megadására nincs szükség (Model 1/Heat Transfer in Solids/Heat Transfer in Solids 1) alatt. Abban az esetben, ha nem rendelünk anyagokat a tartományokhoz, úgy ezen a ponton is rögzíthetjük ezeket. Ehhez az egyes tulajdonságok alatt/mellett lévő legördülő menükben válasszuk a felhasználó által definiált kifejezést (Used defined), majd az előbukkanó cellába adjuk meg az értéket, vagy a paraméterként definiált változó nevét.
A modellalkotás utolsó lépésében rögzítsük az megadott peremfeltételeket (Táblázat A.1), ehhez végezzük el az alább (Táblázat A.3) látható beállításokat a modellben. Jobb egérgombbal kattintva a Model 1/Heat Transfer in Solids pontra tudunk peremfeltételeket rendelni a mérlegegyenlethez. A 2-es peremcsoport esetén nincs szükség újabb peremfeltétel hozzárendelésére a mérleghez, ugyanis ez automatikusan felvételre kerül a hőmérleg alá, illetve az összes külső pereme a geometriának is hozzárendelésre kerül ehhez a peremfeltételhez. Ezen peremfeltételre kattintva láthatjuk, hogy vannak belső peremek (5-ös peremcsoport) is a geometriában, ezeket a program not applicable jelzővel látja el, azaz ezekre vonatkozóan nem kell rögzítenünk feltételt, ugyanis automatikusan egyenlővé teszi a program a perem két oldalán az állapotváltozókat. Amint felvesszük a több peremfeltételt és azokhoz peremeket rendelünk, úgy a Thermal Insulation 1 peremfeltétel esetén, ezen peremek mellett az overriden jelző jelenik meg, ami azt jelenti, hogy a sorrendben később álló peremfeltétel valamelyike ezt felülírta, és a modell megoldásánál az új peremfeltétel kerül figyelembevételére.
|
Peremcsoport |
Peremfeltétel |
Perem tulajdonsága |
Hozzárendelendő perem |
|---|---|---|---|
|
1 |
Temperature |
310 K |
7, 8 |
|
2 |
Thermal Insulation |
- |
1-6 |
|
3 |
Heat Flux |
500·(293-T) |
29, 30 |
|
4 |
Temperature |
360 K |
17-20 |
|
5 |
- |
- |
9-16, 21-28 |
A 3-as peremcsoport esetén meg kell jegyezni azt, hogy itt az adott peremen a tartományba befelé irányuló hőáram rögzítésére van lehetőség, azaz ennek megfelelően kell felírni a perem két oldala között létrejövő hőmérsékletkülönbséget, amely indukálja ezt a hőáramot. Esetünkben a környezet hőmérsékletéből (293 K) kell az objektum, a felírt hőmérleg alapján számított hőmérsékletét (T) kivonnunk. Gondoljunk bele, amennyiben az objektum hőmérséklete magasabb, mint a környezeté, így az így felírt hőmérsékletkülönbség negatív lesz, amely azt fogja eredményezni, hogy a hőátadási áramsűrűségre felírt összefüggés negatív lesz, azaz hő távozik a rendszerből. Ellenkező esetben a hőmérsékletkülönbség pozitív, amely pozitív hőátadási áramsűrűséget eredményez, azaz hő lép a rendszerbe a környezetből. Az 5-ös peremcsoport esetén, mivel ezek belső peremek, nincs szükség peremfeltétel megadására.
A modellalkotás fázisa ezzel befejeződött, következhet a modell megoldása. Először az előző példánál bemutatott módon alakítsuk ki a hálót az automatikus háló generálással. Jobb egérgombbal a Mesh 1 pontra kattintva előbukkanó menüből a Plot, illetve a Statistics menüpontokra kattintva láthatjuk a geometria felosztásának megfelelőségét és a kapott elemek minőségét (Element quality). Az egyik legfontosabb jellemző a minimális elem minőség (Minimum element quality), ugyanis elegendő egy rossz minőségű elem is, ahhoz, hogy a megoldásunk numerikusan instabillá váljon, s ne konvergáljon. Ebben az esetben az automatikus hálógenerálás mellett, normál (Normal) elem méretet rögzítve 2088 elemet kapunk, melyek átlagos jósága 0,9067, míg a legrosszabb elem jósága, 0,6926. A felosztást finomítva (Finer) nem nő jelentősen az elemek száma, mindössze 2464 elemre van szükség, azonban az elemek átlagos jósága 0,9519-re, míg a legrosszabb elem minősége 0,7047-re emelkedik. Jelen esetben ez elfogadható, ennek további javításához, vagy még kisebb elem méret beállítására van szükség az automatikus elemgenerálás esetén, vagy manuálisan kellene finomítani a geometria azon részeinek felosztásán, ahol az elemek minősége a legalacsonyabb. A megfelelő háló kialakítását követően indítsuk el a stacioner szimulációt, amely a számítógép teljesítményétől függően 5-30 s alatt be is fejeződik és az alább látható (A.9. ábra) stacioner hőmérsékleti képet adja eredményül.
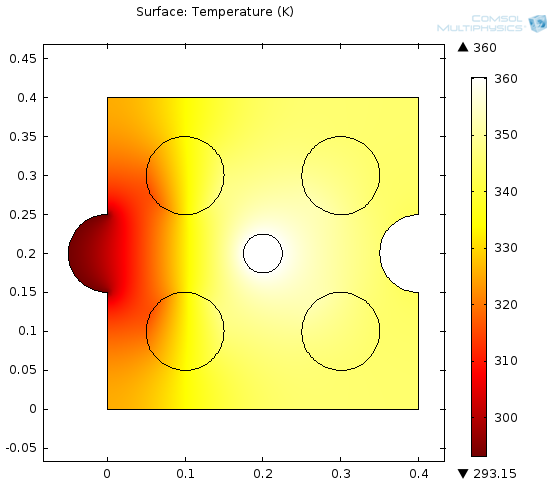
Feljebb (A.9. ábra) jól látható, hogy a vizsgált objektum legmelegebb rész a középső cső, amelyben a gőz kondenzálódik, míg a leghidegebb része az, ahol a környezeti hőmérséklet végtelen nagy hőátadási áram mellett csökkenti az objektum hőmérsékletét. A felület stacioner átlaghőmérsékletének meghatározásához az alábbi összefüggés megoldására van szükség:
|
|
(A.9) |
Mind a nevezőben, mind a számlálóban egy-egy felületi integrál számítására van szükség, ahol a számláló a hőenergia mennyiségét adja meg, míg a nevező a hőkapacitást adja eredményül. Esetünkben két anyagból álló objektumot vizsgálunk, amelyben lévő anyagok tulajdonságai nem függnek a hőmérsékletváltozásától, ily módon az összefüggés az alábbi formában írható fel:
|
|
(A.10) |

Ennek kiszámításához jobb egérgombbal kattintsunk a Results/Derived Values pontra, majd a megjelenő menüben válasszuk az Integration/Surface Integration menüpontot. Az összefüggést egyben nem tudjuk kiszámítani, így tagonként kell elvégeznünk a számítást, ehhez a megjelenő ablakbaa tartomány és az összefüggés beírását követően kattintsunk megjelenő ablak tetején lévő kiértékelés (Evaluate) gombra. Az alábbi táblázatban (Táblázat A.4) lévő módon végezzük a számítást.
|
Számítandó összefüggés |
Beírandó összefüggés |
Hozzárendelendő tartomány |
Eredmény |
|---|---|---|---|
|
|
385·8700·T |
1 |
1,434·108J/m |
|
|
385·8700 |
1 |
4.241·105J/K·m |
|
|
703·2203·T |
2-5 |
1,654·107J/m |
|
|
703·2203 |
2-5 |
4.865·104J/K·m |

A fentebbi táblázatban (Táblázat A.4) látható eredmények alapján már számítható az átlagos stacioner hőmérséklet:
|
|
(A.11) |

ami az A.9. ábra alapján hihető. A következőkben bemutatásra kerül, hogy hogyan tudjuk az átlag hőmérséklet időbeli alakulását számítani, ennek érdekében természetesen egy dinamikus vizsgálatot kell létrehoznunk, ennek érdekében jobb egérgombbal kattintsunk a Study 1 pontra jobb egérgombbal, majd az előbukkanó menüben válasszuk a Study Steps/Time Dependent menüpontot. Ezt követően a stacioner vizsgálatot deaktiválhatjuk (jobb egérgomb a Stationery ponton, majd Disable), vagy törölhetjük (jobb egérgomb a Stationery ponton, majd Delete) a vizsgálatok közül. A dinamikus szimuláció esetén állítsuk a szimulációs időt 1000 s-re, míg a mintavételezési időt 10 s-re.
Mielőtt elindítanánk a dinamikus szimulációt a fentebbi táblázatban (Táblázat A.4) lévő négy összefüggés számítására definiáljunk összefüggéseket. Mivel felületi integrálok is szerepelnek az összefüggésekben, ezért első lépésben ezeket kell felvennünk. Ehhez jobb egérgombbal kattintva a Model 1/Definitions pontra, majd Model Couplings/Integration menüpontot kell kiválasztanunk. A megjelenő ablakban felül adhatjuk meg a létrehozott függvény nevét (alapértelmezésben ez intop1), amellyel a későbbiekben meghívhatjuk az itt létrehozott függvényt. Ez alatt rögzíthetjük, hogy milyen típusú integrálási műveletet is szeretnénk elvégezni, esetünkben a felületi integrál számításához a Domain kiválasztása a megfelelő. Kiválasztási listához adjuk hozzá a réz tartományt. Vegyünk fel egy másik felületi integrált is a szilika üveg tartományokban való számításokhoz.
A felületi integrál függvények definiálását követően jobb egérgombbal a Model 1/Definitions pontra, majd a Variables menüpontot kiválasztva, hozzunk létre egy algebrai összefüggések definiálására szolgáló táblát. Itt a korábban, a paraméterek rögzítésére szolgáló tábla esetén megismerteknek megfelelően tudunk összefüggéseket definiálni, majd ezekre a későbbi számításokban az azonosítójuk alapján, hivatkozni. Az alábbi táblázatban (Táblázat A.5) látható összefüggéseket rögzítve számíthatjuk a felület átlaghőmérsékletét (Tatlag) adott időpillanatban.
|
Változó neve |
Beírandó összefüggés |
|---|---|
|
sz1 |
intop1(385·8700·T) |
|
n1 |
intop1(385·8700) |
|
sz2 |
intop2(703·2203·T) |
|
n2 |
intop2(703·2203) |
|
Tatlag |
(sz1+sz2)/(n1+n2) |
Ezt követően végezzük el a dinamikus szimulációt, majd a jobb egérgombbal a Results pontra kattintva, adjunk hozzá az eredményekhez egy egydimenziós ábracsoportot (1D Plot Group). Az ábracsoportra szintén jobb egérgombbal kattintva (Results/1D Plot Group 4), adjunk hozzá egy globális változók alakulását (Global) bemutató ábrát. Az ábrára pedig vegyük fel a Tatlag változó időbeli alakulását (Results/1D Plot Group 4/Global/y-Axis Data), s így a lentebbi (A.10. ábra) látható görbét kapjuk eredményül.
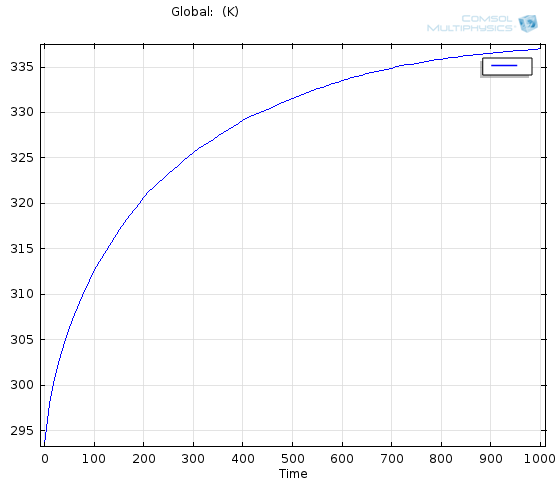
Fentebb (A.10. ábra) jól látható, hogy az átlaghőmérséklet időben nő, illetve az is látható, hogy 1000 s alatt sem jut el a rendszer a stacioner állapotba.
A.5. Vezetősínben kialakuló hőmérsékleti kép meghatározása (Joule törvény)
Ebben a részben arra látunk példát, hogy két különböző jellegű fizikai folyamat hatása a rendszer viselkedésére hogyan kezelhető egy CM modellben. Ehhez tekintsünk egy egyszerű példát, amelyben nagy áramok vezetésére alkalmas, ún. vezetősín háromdimenziós modelljét dolgozzuk ki. Lentebb (A.11. ábra) egy vezetősínre látunk példát.

Amikor egy homogén vezetőn elektromos áram halad keresztül, akkor az felmelegszik. A Joule törvény szerint a vezetőben felszabaduló hőmennyiség megegyezik a vezetéken keresztül folyó áramerősség négyzetének, a vezető elektromos ellenállásának és annak időtartamnak a szorzatával, amíg az áram keresztül folyik a vezetőn:
|
|
(A.12) |

A vezetősínek főbb méreteinek meghatározásánál a legfontosabb szempont, az azon keresztül folyó áram. Alább (A.12. ábra) a vizsgált vezetősín főbb méretei láthatók centiméterben, emellett az is látszik, hogy ez esetben nem tudjuk csökkenteni a dimenziók számát, így a modellalkotás első lépésében a három dimenziót kell válasszuk. A feladat egy olya modell kidolgozása, amely alkalmas a vezetősínben kialakuló hőmérsékleti kép kiszámítására, ennek érdekében az előző példában alkalmazott hőmérleget egészítjük ki egy hőforrás taggal, amely hőáramot a Joule törvény alapján, az átfolyó áram alapján számítjuk.
A két különböző jellegű fizikai jelenség leírására használható modellek (elektromos vezetés – AC/DC/Electric Currents; hővezetés – Heat Transfer/Heat Transfer in Solids) integrált módon is elérhető a CM programban, ehhez a Heat Transfer/Electromagnetic Heating/Joule Heating összefüggéseket adjuk hozzá a modellhez. Mivel jelen példában a kialakuló stacioner hőmérsékleti képet kell meghatároznunk, így a modellegyenletek kiválasztását követően a stacioner vizsgálatot válasszuk, ezzel a modellalkotás előkészítő fázisát befejezve.
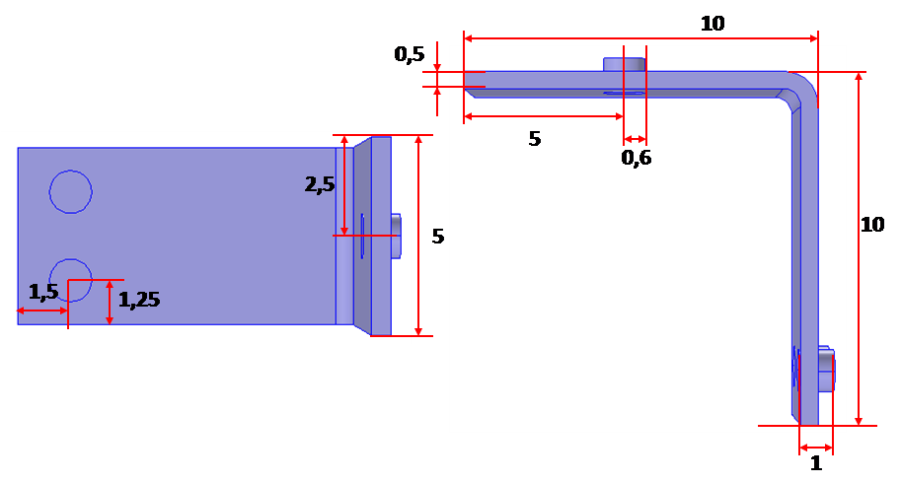
Egy háromdimenziós geometria létrehozása során a CM programban is lehetőség van, a más számítógépes tervező szoftverekben megismert munkasíkok létrehozására, majd ezekből kihúzással, vagy forgatással háromdimenziós testek létrehozására. Első lépésben hozzuk létre a sínt, amelyhez vegyünk fel egy munkasíkot jobb egérgombbal a Geometry 1 pontra kattintva, majd az előbukkanó menüben a Work Plane menüpontot választva. A munkasíkot a zx-síkban hozzuk létre. Ezt követően vegyünk fel két négyzetet, az egyiknek az oldalai 0,1 m, a másiké pedig 0,095 m legyen. A nagyobb négyzetből kivonva a kisebbiket, majd a sarkokat lekerekítjük (jobb egérgombbal a Geometry 1/Work Plane 1/Plane Geometry pontra kattintsunk, majd a felbukkanó menüben válasszuk a Fillet menüpontot). A belső sarokpont esetén 0,005 m-t, míg a külső sarokpont esetén 0,01 m-t alkalmazzunk. Ezt követően jobb egérgombbal a Geometry 1/Work Plane 1 pontra, majd a felbukkanó menüben válasszuk az Extrude menüpontot. 0,05 m távolságra húzzuk ki a munkasíkot.
A csavarok elhelyezéséhez szintén használhatunk munkasíkokat, az alábbi. táblázatban (Táblázat A.6) a három darab henger elhelyezéséhez szükséges méreteket és koordinátákat foglaltuk össze, valamint a henger forgástengely síkjának koordinátáit.
|
Henger |
Méretek (r, l) |
Koordináták (x, y, z) |
Tengely koordináták (x, y, z) |
|---|---|---|---|
|
1. |
(0,006, 0,1) |
(0,015, 0,0125, 0,0995) |
(0, 0, 1) |
|
2. |
(0,006, 0,1) |
(0,015, 0,0375, 0,0995) |
(0, 0, 1) |
|
3. |
(0,006, 0,1) |
(0,0995, 0,025, 0,05) |
(1, 0, 0) |
A geometriai modell bejezését követően definiáljuk a szerkezeti anyagokat az egyes tartományokba. A vezetősín rézből, míg a csavarok egy titán ötvözetből (Titanium beta-21S) készültek, rendeljük hozzá ezeket a megfelelő tartományokhoz.
Az 1. és 2. csavarok síntől távolabbi pereme (12 és 19 peremek) vannak földelve, míg a 3. csavar távolabbi peremére 20 mV elektromos potenciált kapcsolunk. A földelés megadásához jobb egérgombbal kattintsunk a Model 1/Joule Heating 1 pontra, majd az előbukkanó menüben válasszuk ki az Electric Currents/Ground menüpontot és rendeljük hozzá a megfelelő peremeket. Az elektromos potenciál az előzőekkel megegyező módon történik, de itt az Electric Potential peremfeltételt válasszuk és rendeljük hozzá a megfelelő peremet (43). A 20 mV megadásánál ne felejtsük el a szögletes zárójelet a mértékegység körül. Az objektum többi peremén egy környezet felé irányuló hőátadási áram indukálódik, ennek megadása az előző példában látott módon történik. Ez esetben a hőátadási tényező értéke 5 W/m2K, míg a környezet hőmérséklete 293 K.
A modellalkotás fázisa a hőátadás peremfeltétel rögzítésével befejeződött, a hálógenerálást követően oldjuk meg a modellt. A számítás az alkalmazott számítógép teljesítményétől függően 5-20 s. A számított stacioner hőmérsékleti képet alább (A.13. ábra) láthatjuk. Ahogy az várható volt az objektum legmelegebb pontja azon csavar, amelyre a potenciált kötöttük. Mivel a földelés két, a harmadikkal megegyező méretű csavarra is rá lett kötve, így ezek esetén nem kell akkora hőmérsékletemelkedéssel számolni. Az így kapott szimulátor alkalmas vezetősínek főbb méreteinek meghatározására, a megismert modell pedig bármely elektromos vezető esetén melegedés számítására.
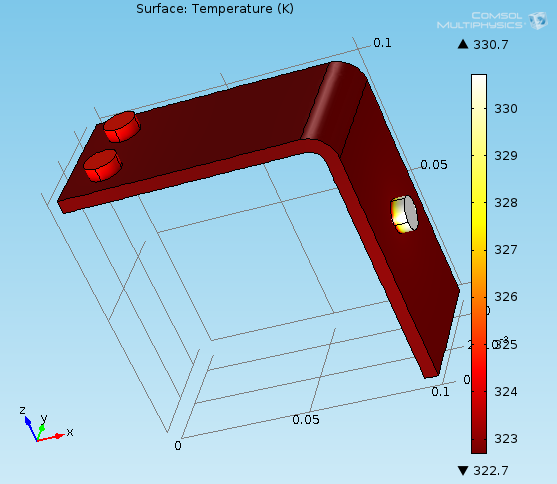
A.6. Mérőperemben kialakuló áramlás vizsgálata
A valós rendszerek üzemeltetése során nagyon fontos a megfelelő térfogatáram fenntartása. A folyamatos technológiák működésétől a csővezetékekben történő szállításig a gyártó technológiák szinte minden területén megjelennek áramlásmérő berendezések. Többféle módon mérhetünk térfogatáramot, vagy áramlási sebességet. Léteznek sebességmérő műszerek amelyek pontban, vagy síkban képesek a sebességértékek mérésére, mint például veloci, vagy anemométerek. Emellett a turbinás áramlásmérők valamilyen forgó elem segítségével mérik a térfogatáramot. A leggyakrabban használt módszerek a keresztmetszet változás kihasználásával működnek. A keresztmetszet változásával változni fog a sebesség, ez pedig a nyomás változásának mérésével jól nyomon követhető. A mérőperemek az áramlási sebesség mérésére szolgáló berendezések közé tartoznak. Alapvetően egy csőszűkítő elemet helyezünk el a csőben, és a perem előtti és utáni nyomáskülönbségből számítható az áramlási sebesség. Csőszerű geometriák esetében CM szoftverben alkalmazható az az egyszerűsítés, miszerint hengerszimmetrikus koordinátarendszert alkalmazunk, így kevesebb elemszámmal kisebb számítási teljesítmény mellett végezhetőek el a szimulációs vizsgálatok. A probléma alapvetően áramlási jellegű, és valamilyen áramlási modell segítségével írható le. Ebben a gyakorlatban egy mérőperemben kialakuló áramlási képet fogjuk meghatározni, valamint különböző módszerekkel megismerkedünk a CM különböző adatkinyerési eszközeivel, valamint parametrikus megoldó módszerekkel. A mérőperem, mint modellezett objektum segítségével tanulmányozhatóak az áramlási problémák. Az áramlás jellege miatt turbulens egyenletek beépítése is szükséges lehet.
Első lépésben definiáljuk a 2D axyssimmetric geometriát, majd a Fluid flow Single Phase Flow Laminar flow modellt. Mivel állandósult állapotban szeretnénk vizsgálni a rendszert ezért a Stationary menüpontot válasszuk.
|
Peremcsoport |
Peremfeltétel |
|---|---|
|
1 |
Szimmetriatengely |
|
2 |
Fal - nincs impulzustranszport a környezet felé, u=0 m/s |
|
3 |
Betáplálás (átlagsebesség u=uin) |
|
4 |
Elvétel (Súrlódásmentes nyomás elvétel p=0 Pa |
A geometriát és az alkalmazott peremfeltételeket az Táblázat A.7 és az A.14. ábra mutatja.
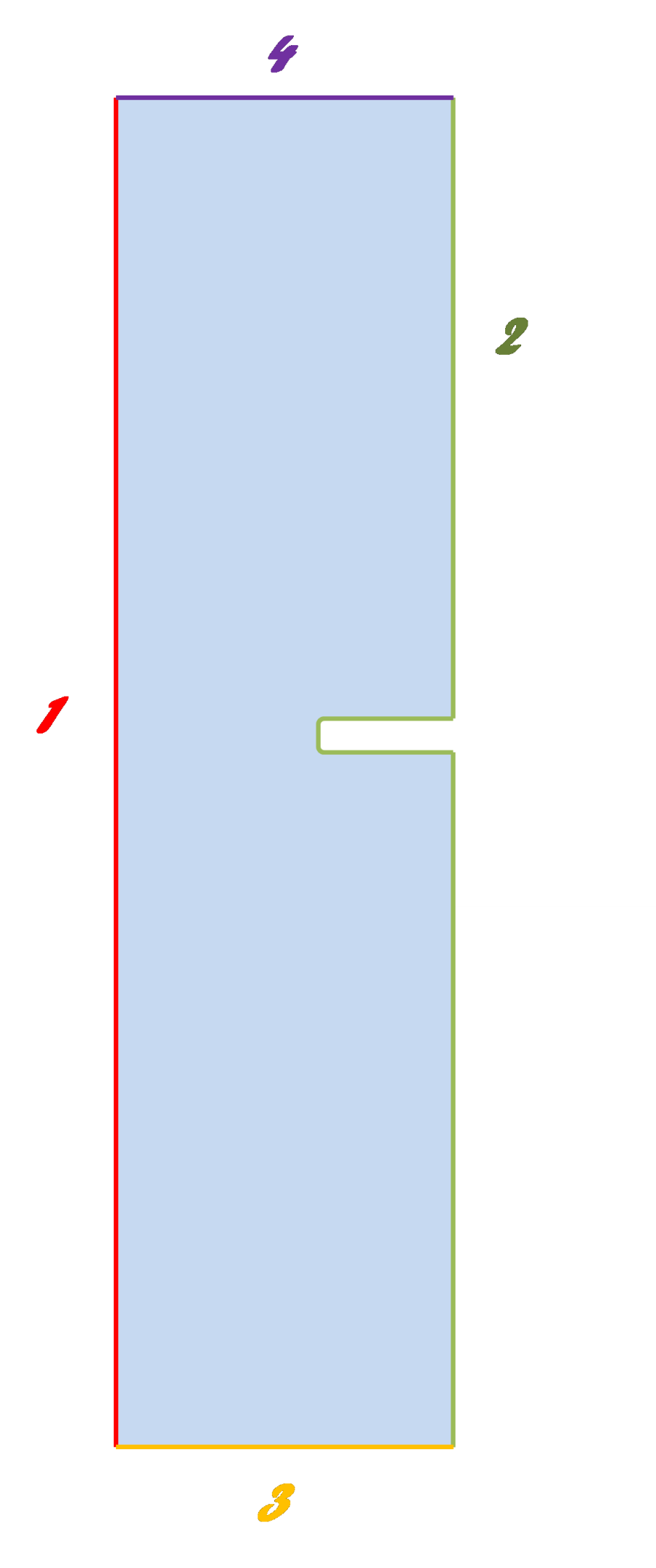
Az előzőekben megismerteknek megfelelően definiáljuk az anyagi tulajdonságokat Definitions/Variables fül alatt (rho=1000 kg/m3 eta=0.001 Pas). A betáplálási sebességet paraméterként definiáljuk a Global Definitions/Parameters fül alatt (uin=0.001 m/s). Ezáltal lehetővé válik a parametrikus vizsgálatnál a belépő sebesség használata paraméterként. A geometria esetében először a csövet kell megrajzolnunk (Rectangle-r1), majd az ebből kivágni kívánt peremet (Rectangle-r2). A harmadik lépés a két elem különbségének képzése, melyet a Geometry/Boolean Operations/Difference fülön érhetünk el. Figyeljünk rá, hogy felül (amiből kivonunk) a cső (r1), míg alul (amit kivonunk) a perem (r2) helyezkedjen el. Ezután már csak egy feladatunk van, a perem négyzetes felületének simítása, melyhez a Geometry/Fillet parancsot használjuk. A Fillet parancs sugaránál 0.01 m-t adjunk meg. Az egyes elemek pontos méreteit az Táblázat A.8 tartalmazza.
|
Alakzat |
Méret (l 1 ,l 2 ) |
Pozíció (r,z) |
Azonosító |
|---|---|---|---|
|
Téglalap |
(0,25 , 1) |
Bal alsó sarok (0, 0) |
r1 |
|
Téglalap |
(0,01 , 0,025) |
Középpont (0,15, 0,5) |
r2 |
Miután létrehoztuk a geometriát a következő lépés a modell paraméterek definiálása. A Laminar Flow/Fluid Properties fül alatt váltsuk át a Density és a Dynamic viscosity legördülő menünél User defined –re, és írjuk be a rho és eta változókat (amiket a korábbiakban definiáltunk). A Laminar Flow-ra jobb klikkelve adjunk hozzá egy Inlet peremet. Jelöljük ki a megfelelő peremet, majd a Velocity legördülő menü alatt a Normal inflow velocity alatt definiáljuk az uin paramétert. A Laminar Flow-ra jobb klikkelve adjunk hozzá egy Outlet peremet, majd jelöljük ki a megfelelő peremet. Ellenőrizzük, hogy az Axial Symmetry 1 peremen, valamint a Wall 1 peremeken minden adott tulajdonságú perem ki van jelölve. A Mesh és Study elemeket hagyjuk alapértelmezett értéken, majd a Study 1/Compute paranccsal futtassuk le a modellünket.
Amennyiben minden beállításunk megfelelő volt körülbelül 1 perc múlva az (A.15. ábra) ábrán látható sebességi mezőt ábrázoló diagramot láthatjuk.
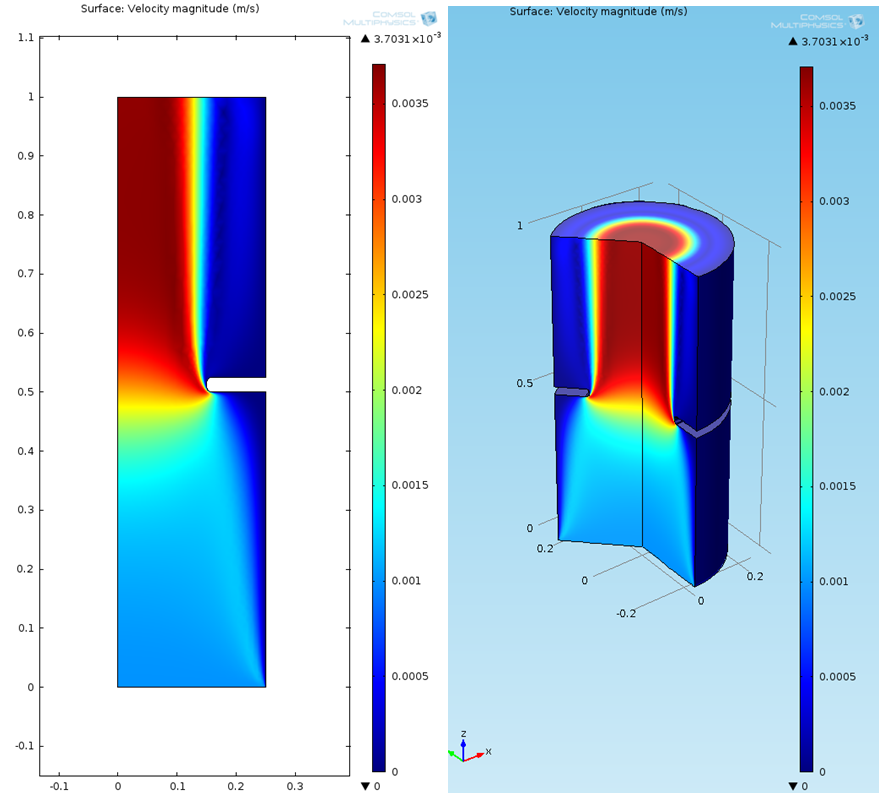
Szemléltetésképpen a hengerszimmetrikus ábra körbeforgatásával nyert (Velocity 3D fül alatt) látható ábrázolást is bemutatjuk az ábrán (A.15. ábra).
A következő lépésben állítsuk be a Parametrikus megoldó módszert. A Study 1/Parametric Sweep fülnél a Parameters name alatt klikkeljünk plusz jelre, ezáltal lehetővé válik a paraméterek hozzáadása, ahol adjuk hozzá az uin paramétert. Ezután a Parameter values list kitöltése következik. Klikkeljünk a jobb szélső Range ikonra. A Starthoz 0.001-es, a Stephez 0.001-et, a Stophoz pedig 0.01-et írjunk. A Study 1/Compute paranccsal futtassuk le a szimulációt. Az ábrán (A.16. ábra) figyeljük meg a megoldás menetét. A stacioner megoldó minden egyes paraméter értéknél kiszámítja a modell megoldását, majd lépteti a paramétert a parametrikus megoldóban.
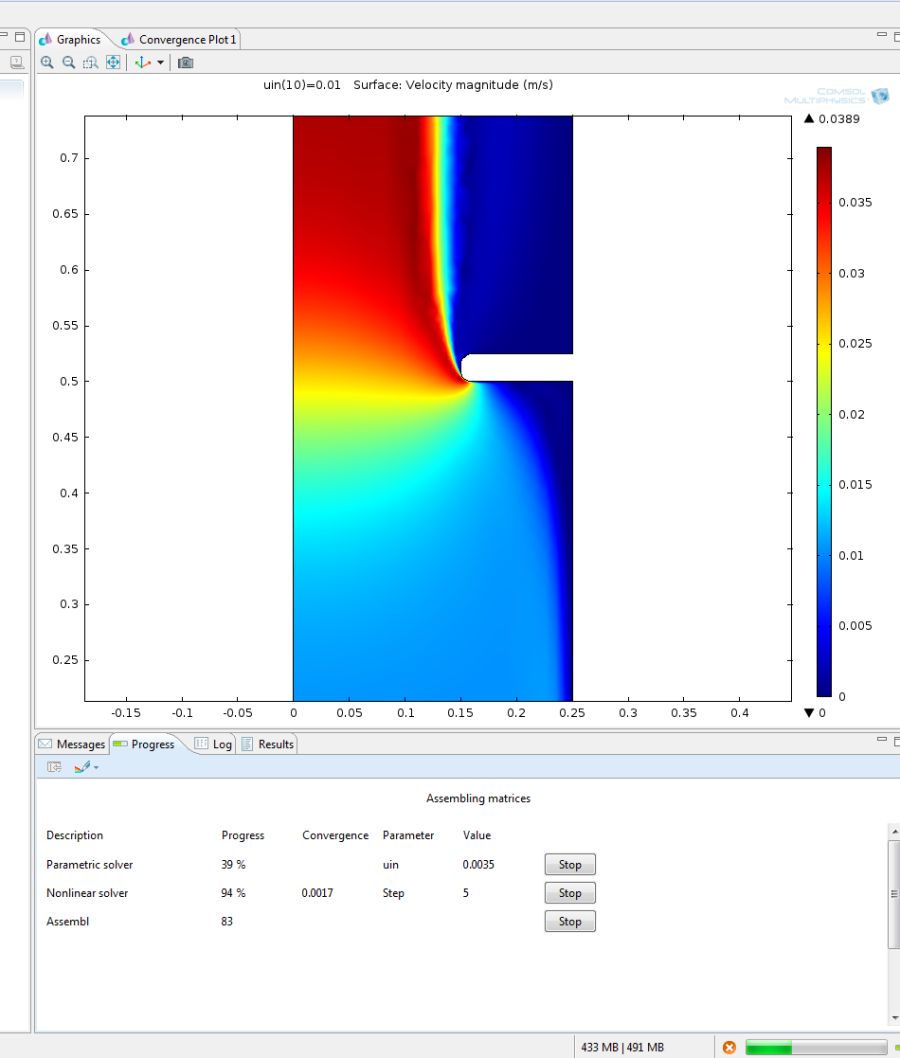
A következő lépésben vizsgáljuk meg a sebességértékek sugárirányú változását az egyes esetekben különböző metszeteknél. A Results/Data Sets menüpont lehetőségünk van különböző metszetek, megoldások definiálására. Választhatunk különböző pontokat, van lehetőség több pont, úgynevezett gridek definiálására a megoldásaink kiértékeléséhez. Természetesen az, hogy milyen kiértékelés választunk nagyban függ a tanulmányozott problémától, például pontszerű detektálás esetén érdemes a Cut point opciót választani. Mivel esetünkben egy sugárirányú metszetet szeretnénk számítani, ezért a Cut line opciót válasszuk. Természetesen a további választási lehetőség közül is választhatunk, azonban célszerű mindig az adott térdimenziónak megfelelő lehetőséget választani (Cut line 2D). A Point 2 r mezőbe írjunk 0.25-t, míg mindkét z mezőbe 0.5125-t, majd a plot paranccsal ellenőrizzük, hogy az általunk definiált vonal a perem közepén helyezkedik-e el. Amennyiben igen, akkor a Results/1 D Plot Group paranccsal definiáljunk egy vonalas ábrát. Jobb klikkeljünk az 1D plot Groupra, majd válasszul a Line Graph-ot. Az 1D Plot Group -nál a Data set legördülőmenüből válasszuk ki az előzőleg definiált Cut line 2D 1 metszetet, és hagyjuk a paramétereket alapértelmezett állapotban. A Plot ikonra kattintva ezután lehetőségünk van kirajzoltatni az ábrát, amely az egyes betáplálási sebességek függvényében mutatja a sebességprofilokat a mérőperemnél. Az adott rajzra specifikus beállításokat a Line Graph 1 fülön tehetjük meg. A Legends fület kibontva pipáljuk be a Show legends lehetőséget, majd ábrázoljuk újra a diagrammot. Természetesen van lehetőségünk párhuzamos metszetek definiálására, ezt a Cut Line 2D 1 – nél tehetjük meg bepipálva az Additional parallel lines jelölőnégyzet bepipálásával tehetünk meg. Azonban itt vigyázzunk, mivel a további párhuzamosok definiálása relatív, tehát a pozíciót az eredeti vonalhoz képest kell megadnunk. Definiáljunk összesen 5 párhuzamos metszetet -0.3 Start 0.15 Step és 0.3 Stop értékkel. Ebben az esetben Csak a legmagasabb sebességnél ábrázoljunk. A kapott eredményeket az A.17. ábra szemlélteti a középső metszet az összes sebesség paraméternél, valamint a párhuzamos metszetek a legnagyobb sebességértéknél.
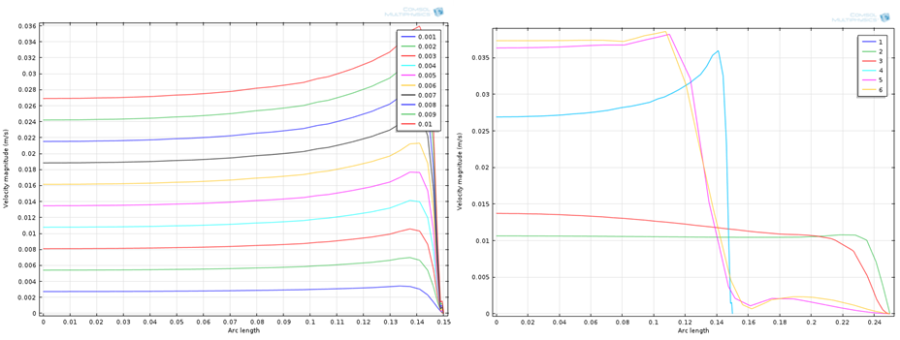
Sok esetben az alapszintű lamináris modellek nem képesek megfelelően leírni a berendezés belsejében lejátszódó folyamatokat, ilyenkor szükséges az áramlási jelleget jobban közelítő turbulencia egyenletek használata. A CM-ben a Reynolds átlagolt Navier-Stokes egyenletekkel leírt k-ε kétegyenletes turbulencia modellt alkalmazzuk a probléma leírására. A modell paramétereinek minimális változtatására van lehetőség. emellett a program támogatja más turbulencia modellek alkalmazását (k-ω modell, Spart-Allmanas modell), azonban bonyolultabb modelleket nem tartalmaz a turbulens áramlások leírására (pl. LES, vagy RSM modellek). A lamináris modellről turbulensre történő átváltás elég könnyen kivitelezhető CM-ben. Nem kell más tennünk, mint a Laminar Flow fülnél a Turbulence model type legördülő menünél kiválasztjuk a RANS (Reynolds averaged Navier-Stokes) egyenletet a None helyett. A modellünkre jobb klikkelve hozzunk létre egy új studyt, majd a Parameters fülön változtassuk 0.01 m/s-ra uin értékét, és futtassuk le a study 2-t.
A.7. Csőszigetelés vastagságának vizsgálata
Ebben a feladatban egy csőszigetelés vastagságának hatását vizsgáljuk a csőben létrejövő hőmérsékletprofilokra. A leképezett geometria belső része megegyezik az előző feladatban tárgyalt cső méreteivel. Ehhez adunk hozzá egy szigetelést, amit kerámiaként definiálunk. A peremeket az A.18. ábra, valamint Táblázat A.9 mutatja be. Alapvetően többféle folyamatot képezünk le. Lamináris impulzusmérleget alkalmazunk, mellyel a csőben való folyadékáramlást írjuk le (Laminar flow). Szükségünk van két további mérlegre a folyadékokban (Heat Transfer in Fluids - HTF), valamint a szilárd anyagokban (Heat Transfer in Solids - HTS) történő hőtranszport folyamatok leírására. A adott probléma definiálása és megoldása elvégezhető a CM GUI-ja használatával is, azonban ebben az esetben a Livelink to MATLAB (Livelink) használatát fogjuk bemutatni. A modell összeállítása, és egyszeri lefuttatása után. Válasszuk a File/Save Model as M file lehetőséget, és mentsük le a fájlunkat egy tetszőleges könyvtárba, természetesen követve a MATLAB előírásait a fájlnevekre.
|
Peremcsoport |
Peremfeltétel |
|---|---|
|
1 |
Szimmetriatengely |
|
2 |
Fal - nincs impulzustranszport a környezet felé, u=0 m/s Nincs hőtranszport a környezet felé |
|
3 |
Betáplálás (átlagsebesség u=0.001 m/s) Hőmérséklet (T=353 K) |
|
4 5 6 |
Elvétel (Súrlódásmentes nyomás elvétel p=0 Pa) Hőmérséklet kilépés Köztes perem a folyadék és a szilárd fázis között (A HTF modellben T=Tsolid, míg a HTS modelben T=Tfluid ) Külső hőmérséklet (T=293 K) |
A hőmérsékletként definiált peremek esetében az e végtelen hőátadási tényezőt definiáltunk. A megoldás stacioner, és mindhárom modellt együtt oldjuk meg. Erre azért van lehetőségünk, mivel mind a modellek, mind a közöttük lévő kapcsolatok nem túl komplexek. Figyeljük meg a Dependent variables változókat az egyes fizikai folyamatok leírásánál. Az impulzusmérlegnél a sebességvektorokat találjuk, valamint a nyomást, míg a hőmérlegeknél a mérlegekhez tartozó hőmérsékleteket. Ezeknek a változóknak akkor van a legnagyobb jelentőségük, amikor az egyes peremek közötti interakciót írjuk le. Így lehetséges például az impulzusmérleg megoldásának felhasználása a hőmérleg konvektív tagjának számítására. Hőátadás számításánál is felhasználhatóak ezek a függő változók, valamint minden esetben, amikor ábrázolunk, vagy valamilyen számítást végzünk ezekkel a változónevekkel tudunk hivatkozni az egyes modellek állapotjelzőire.
Az .m fájl létrehozása után indítsuk el a CM-et a with MATLAB végezetű ikonnal. Egy parancssor ablak fog megjelenni, ahol definiálnunk kell egy felhasználónevet és egy jelszót. Amint ezzel végeztünk, megnyílik egy MATLAB alkalmazás, ahol foglalkozhatunk a modellünkkel MATLAB környezetben. Célszerű függvényként használni a CM modellt, bemeneti paraméterként a falvastagságot, kimeneti paraméterként pedig a felületen integrált hőmérsékletet kapva. A továbbiakban a felhasznált kódot fogjuk feldolgozni, és áttekinteni, kiemelve a CM-ben megtalálható egyes részeket.
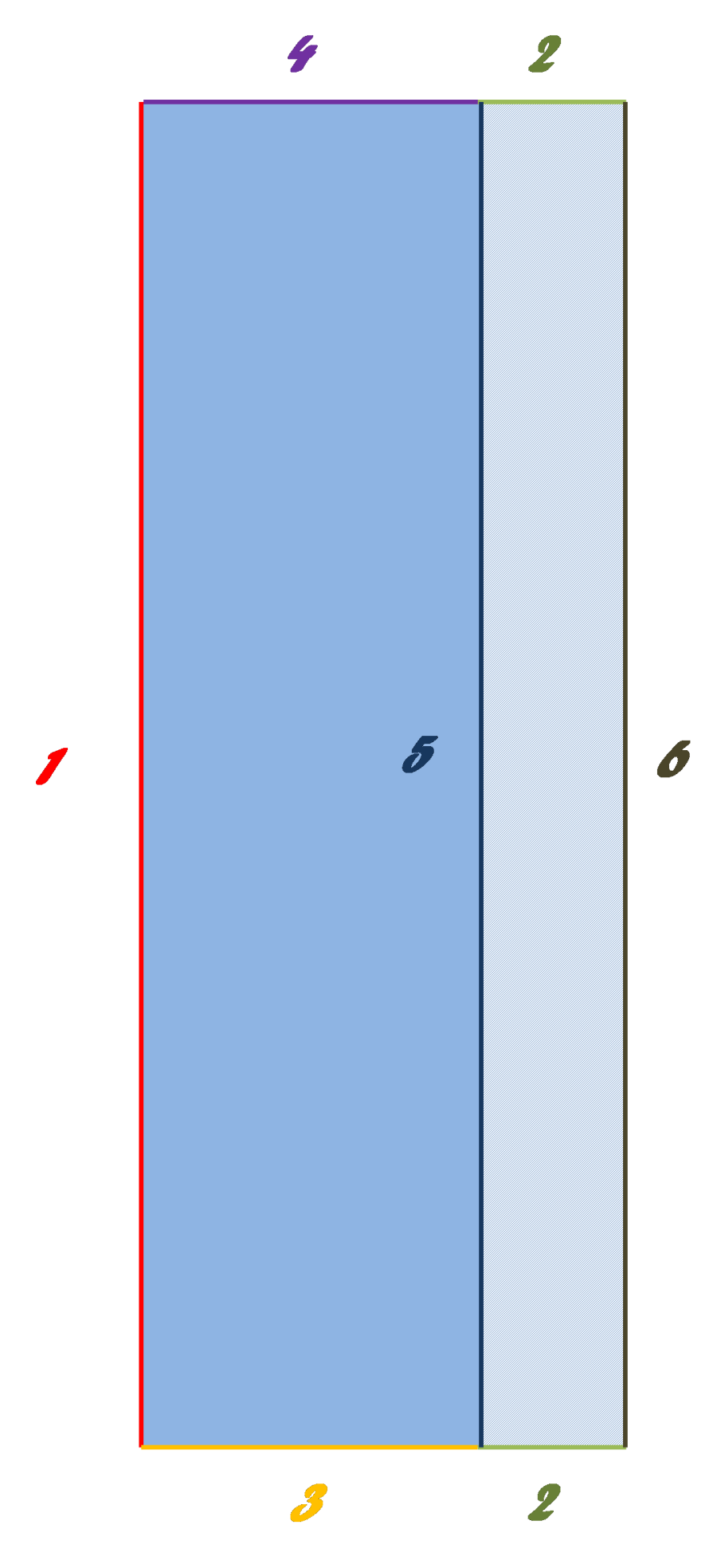
Az első lépés a függvény sor, ami tartalmazza a program nevét, a bementi változót (atm), valamint a kimeneti változót (h1). Ezután át kell alakítanunk a bemeneti változót szám változóból string változóra, mivel így tudjuk majd beírni a programba (a Livelink string változóként kezeli a változók egyes értékeit). A CM modell definiálása, valamint a munkakönyvtár beállítása a következő lépés.
function h1=program(atm)
atm=num2str(atm);
import com.comsol.model.*
import com.comsol.model.util.*
model = ModelUtil.create('Model');
model.modelPath(['L:\Proba);
model.modelNode.create('mod1');
Figyeljük meg az általános szintaktikát. A Livelink modellezés esetén az egyes parancsokat pontokkal választjuk el egymástól (model.modelPath). A CM-ben található azonosítók string változóként kerülnek definiálása (’Model’).
A modell létrehozása után a következő lépés a geometria létre hozása, a dimenzió, valamint a hengerszimmetria beállítása. Ezután létrehozzuk a modell egyes elemeit (mesh, fizikai folyamatok leírása, study stb.). Ez felel meg a CM felhasználói felületén a modellalkotás első lépéseinek, melyek a zászlóra való rányomásig telnek el.
model.geom.create('geom1', 2);
model.geom('geom1').axisymmetric(true);
model.mesh.create('mesh1', 'geom1');
model.physics.create('ht', 'HeatTransferInFluids', 'geom1');
model.physics.create('ht2', 'HeatTransfer', 'geom1');
model.physics.create('spf', 'LaminarFlow', 'geom1');
model.study.create('std1');
model.study('std1').feature.create('stat', 'Stationary');
model.study('std1').feature('stat').activate('ht', true);
model.study('std1').feature('stat').activate('ht2', true);
model.study('std1').feature('stat').activate('spf', true);
A következő lépések pedig teljesen azonosak a CM-ben történt egyes lépések leírásával. Definiáljuk a geometriát, két négyzetként. Ezután létrehozzuk parametrikusan a csőátmérő (atm), amit most már parametrikusan írunk be a megfelelő helyre. Ezután lérehozzuk a geometriát. Amennyiben ábrázolni szeretnénk ezt a geometriát az mphgeom parancs használata szükséges.
model.geom('geom1').feature.create('r1', 'Rectangle');
model.geom('geom1').feature('r1').setIndex('size', '0.25', 0);
model.geom('geom1').run('r1');
model.geom('geom1').run('r1');
model.geom('geom1').feature.create('r2', 'Rectangle');
model.geom('geom1').feature('r2').setIndex('size', 'dcso', 0);
model.param.set('dcso', atm);
model.geom('geom1').feature('r2').setIndex('pos', '0.25', 0);
model.geom('geom1').run('r2');
model.geom('geom1').run;
Az egyes fizikai folyamatok létrehozás, és paraméterezése következik. Szépen sorban definiáljuk az impulzusmérleg tartomány és peremfeltételeit. Ezután létrehozzuk a két hőmérleget, majd ezekkel kapcsolatban is definiáljuk a megfelelő peremfeltételeket. Az adott feature kijelölése után a peremfeltétel definiálása és számszerűsítése következik, majd ezután jelöljük ki a konkrét peremet. Figyeljük meg, hogy a szakasz utolsó sorában megjelenik a hőmérlegben az impulzusmérlegből számított sebesség, így kapcsolva össze a két modellt.
model.physics('spf').feature.create('inl1', 'Inlet', 1);
model.physics('spf').feature('inl1').selection.set([2]);
model.physics('spf').feature('inl1').set('U0in', 1, '0.001');
model.physics('spf').feature.create('out1', 'Outlet', 1);
model.physics('spf').feature('out1').selection.set([3]);
model.physics('ht').feature.create('temp1', 'TemperatureBoundary', 1);
model.physics('ht').feature('temp1').selection.set([2]);
model.physics('ht').feature('temp1').set('T0', 1, '353.15[K]');
model.physics('ht').feature.create('temp2', 'TemperatureBoundary', 1);
model.physics('ht').feature('temp2').selection.set([4]);
model.physics('ht').feature('temp2').set('T0', 1, 'T2');
model.physics('ht2').feature.create('temp1', 'TemperatureBoundary', 1);
model.physics('ht2').feature('temp1').selection.set([4]);
model.physics('ht2').feature('temp1').set('T0', 1, 'T');
model.physics('ht2').feature.create('temp2', 'TemperatureBoundary', 1);
model.physics('ht2').feature('temp2').selection.set([7]);
model.physics('ht').feature.create('ofl1', 'ConvectiveOutflow', 1);
model.physics('ht').feature('ofl1').selection.set([3]);
model.physics('ht').feature('fluid1').set('minput_velocity_src', 1, 'root.mod1.u');
Az anyagi jellemzők beállítása történhet többéle módon. Abban az esetben, ha paraméterként definiáljuk, vagy User Defined opcióval definiáljuk, akkor a megfelelő fizikai folyamatok leírásánál jelennek meg. Ha a beépített könyvtárból (Open Material Browser) vesszük az adott paramétert, abban az esetben egy eléggé szerteágazó, és terjedelmes adathalmazt kapunk. Figyeljük meg például a víz esetében (mat1) a polinomiális összefüggéseket, melyekkel az egyes tulajdonságok hőmérsékletfüggését írjuk le.
model.material.create('mat1');
model.material('mat1').name('Water');
model.material('mat1').set('family', 'water');
model.material('mat1').propertyGroup('def').set('dynamicviscosity', 'eta(T[1/K])[Pa*s]');
model.material('mat1').propertyGroup('def').set('ratioofspecificheat', '1.0');
model.material('mat1').propertyGroup('def').set('electricconductivity', '5.5e-6[S/m]');
model.material('mat1').propertyGroup('def').set('heatcapacity', 'Cp(T[1/K])[J/(kg*K)]');
model.material('mat1').propertyGroup('def').set('density', 'rho(T[1/K])[kg/m^3]');
model.material('mat1').propertyGroup('def').set('thermalconductivity', 'k(T[1/K])[W/(m*K)]');
model.material('mat1').propertyGroup('def').set('soundspeed', 'cs(T[1/K])[m/s]');
model.material('mat1').propertyGroup('def').func.create('eta', 'Piecewise');
model.material('mat1').propertyGroup('def').func('eta').set('funcname', 'eta');
model.material('mat1').propertyGroup('def').func('eta').set('arg', 'T');
model.material('mat1').propertyGroup('def').func('eta').set('extrap', 'constant');
model.material('mat1').propertyGroup('def').func('eta').set('pieces', {'273.15' '413.15'
'1.3799566804-0.021224019151*T^1+1.3604562827E-4*T^2-4.6454090319E-7
*T^3+8.9042735735E-10*T^4-9.0790692686E-13*T^5+3.8457331488E-16*T^6';
'413.15' '553.75' '0.00401235783-2.10746715E-5*T^1+3.85772275E-8*T^2-2.39730284E-11*T^3'});
model.material('mat1').propertyGroup('def').func.create('Cp', 'Piecewise');
model.material('mat1').propertyGroup('def').func('Cp').set('funcname', 'Cp');
model.material('mat1').propertyGroup('def').func('Cp').set('arg', 'T');
model.material('mat1').propertyGroup('def').func('Cp').set('extrap', 'constant');
model.material('mat1').propertyGroup('def').func('Cp').set('pieces', {'273.15' '553.75'
'12010.1471-80.4072879*T^1+0.309866854*T^2-5.38186884E-4*T^3+3.62536437E-7*T^4'});
model.material('mat1').propertyGroup('def').func.create('rho', 'Piecewise');
model.material('mat1').propertyGroup('def').func('rho').set('funcname', 'rho');
model.material('mat1').propertyGroup('def').func('rho').set('arg', 'T');
model.material('mat1').propertyGroup('def').func('rho').set('extrap', 'constant');
model.material('mat1').propertyGroup('def').func('rho').set('pieces', {'273.15' '553.75'
'838.466135+1.40050603*T^1-0.0030112376*T^2+3.71822313E-7*T^3'});
model.material('mat1').propertyGroup('def').func.create('k', 'Piecewise');
model.material('mat1').propertyGroup('def').func('k').set('funcname', 'k');
model.material('mat1').propertyGroup('def').func('k').set('arg', 'T');
model.material('mat1').propertyGroup('def').func('k').set('extrap', 'constant');
model.material('mat1').propertyGroup('def').func('k').set('pieces', {'273.15' '553.75'
'-0.869083936+0.00894880345*T^1-1.58366345E-5*T^2+7.97543259E-9*T^3'});
model.material('mat1').propertyGroup('def').func.create('cs', 'Interpolation');
model.material('mat1').propertyGroup('def').func('cs').set('funcname', 'cs');
model.material('mat1').propertyGroup('def').func('cs').set('interp', 'piecewisecubic');
model.material('mat1').propertyGroup('def').func('cs').set('extrap', 'const');
model.material('mat1').propertyGroup('def').func('cs').set('table', {'273' '1403'; '278' '1427';
'283' '1447'; '293' '1481'; '303' '1507'; '313' '1526';
'323' '1541'; '333' '1552'; '343' '1555'; '353' '1555'; ...
'363' '1550'; '373' '1543'});
model.material('mat1').propertyGroup('def').addInput('temperature');
model.material('mat1').set('family', 'water');
model.material('mat1').selection.set([1]);
model.material.create('mat2');
model.material('mat2').name('Alumina');
model.material('mat2').set('family', 'aluminum');
model.material('mat2').propertyGroup('def').set('thermalexpansioncoefficient', '8e-6[1/K]');
model.material('mat2').propertyGroup('def').set('heatcapacity', '900[J/(kg*K)]');
model.material('mat2').propertyGroup('def').set('density', '3900[kg/m^3]');
model.material('mat2').propertyGroup('def').set('thermalconductivity', '27[W/(m*K)]');
model.material('mat2').propertyGroup.create('Enu', 'Young''s modulus and Poisson''s ratio');
model.material('mat2').propertyGroup('Enu').set('poissonsratio', '0.222');
model.material('mat2').propertyGroup('Enu').set('youngsmodulus', '300e9[Pa]');
model.material('mat2').set('family', 'aluminum');
model.material('mat2').selection.set([2]);
Fontos, hogy megfelelően jelöljük ki az egyes tartományokat, hiszen ezek fogják meghatározni az anyagi jellemzőket.
model.physics('ht').selection.set([1]);
model.physics('ht2').selection.set([2]);
model.material('mat2').selection.set([2]);
model.material('mat2').propertyGroup('def').set('dynamicviscosity', {'1'});
Miután mindent definiáltunk, az utolsó lépés a megoldás előkészítése, és a módszerek beállítása. Alapértelmezetten is szükség van a solver (Stationary) definiálására, valamint a numerikus megoldók paramétereinek (például iterációk maximális száma, solver fajtája, kezdeti lépés) megadása. Ezután az attach paranccsal csatoljuk a megoldást a studyhoz, majd lefuttatjuk a modellt egybe számítva a három korábban említett mérleget.
model.sol.create('sol1');
model.sol('sol1').study('std1');
model.sol('sol1').feature.create('st1', 'StudyStep');
model.sol('sol1').feature('st1').set('study', 'std1');
model.sol('sol1').feature('st1').set('studystep', 'stat');
model.sol('sol1').feature.create('v1', 'Variables');
model.sol('sol1').feature('v1').set('control', 'stat');
model.sol('sol1').feature.create('s1', 'Stationary');
model.sol('sol1').feature('s1').feature.create('seDef', 'Segregated');
model.sol('sol1').feature('s1').feature.create('fc1', 'FullyCoupled');
model.sol('sol1').feature('s1').feature('fc1').set('initstep', 0.01);
model.sol('sol1').feature('s1').feature('fc1').set('minstep', 1.0E-6);
model.sol('sol1').feature('s1').feature('fc1').set('dtech', 'auto');
model.sol('sol1').feature('s1').feature('fc1').set('maxiter', 50);
model.sol('sol1').feature('s1').feature.create('d1', 'Direct');
model.sol('sol1').feature('s1').feature('d1').set('linsolver', 'pardiso');
model.sol('sol1').feature('s1').feature('fc1').set('linsolver', 'd1');
model.sol('sol1').feature('s1').feature('fc1').set('initstep', 0.01);
model.sol('sol1').feature('s1').feature('fc1').set('minstep', 1.0E-6);
model.sol('sol1').feature('s1').feature('fc1').set('dtech', 'auto');
model.sol('sol1').feature('s1').feature('fc1').set('maxiter', 50);
model.sol('sol1').feature('s1').feature.remove('fcDef');
model.sol('sol1').feature('s1').feature.remove('seDef');
model.sol('sol1').attach('std1');
model.sol('sol1').runAll;
A modell megoldása után lehetőségünk van különböző utófeldolgozási (Postprocessing) lépések elvégzésre. A Livelink esetében az egyes ábrákat a PlotGroup (’pg’) azonosítóval látjuk el. A PlotGroupok paraméterezését ugyanúgy a CM-ben megszokott elnevezéssel (Surface, Streamline stb. lehet definiálni). Létrehozunk egy numerikus integrálást, ami a kilépő peremen fogja a teljes felületre vonatkoztatott hőmérsékleti integrál értékét kiszámítani. A kapott eredményeket egy táblázatba íratjuk ki (tbl1), majd az utolsó sorban leírt getReal paranccsal átadjuk a kimeneti változónak, ami ezután tovább fogja adni a főprogramnak. A getReal parancs a táblázat valós részeit fogja átadni a programnak, így például az integrál neve (stringként) nem okoz további problémát, a változót számértékként tudjuk kezelni.
model.result.numerical.create('int1', 'IntLine');
model.result.numerical('int1').selection.set([3]);
model.result.numerical('int1').set('intsurface', 'on');
model.result.numerical('int1').set('expr', '1');
model.result.table.create('tbl1', 'Table');
model.result.table('tbl1').comments('Line Integration 1 (1)');
model.result.numerical('int1').set('table', 'tbl1');
model.result.numerical('int1').setResult;
model.result.numerical('int1').set('expr', 'T/0.19635 [m^2]');
model.result.table('tbl1').removeColumn(0);
model.result.numerical('int1').set('table', 'tbl1');
model.result.numerical('int1').appendResult;
h1=model.result.table('tbl1').getReal;
A legnagyobb előny a függvény alkalmazásában ebben az esetben az, hogy nem kell foglalkoznunk azzal, hogy az adott lépések milyen állapotban vannak a CM-ben, hiszen mindig újrahívjuk a CM-es modellt, így nem származik ütközés az egyes részek újra és újra létrehozásából. A főprogram pedig ezek után nem kell, hogy több adatot tartalmazzon legyen a falvastagságot tartalmazó vektornál, valamint egy ciklusnál, ami minden lépésben átadja a függvénynek a bemeneti paramétereket, valamint rögzíti és változóba gyűjti a kimeneti paramétereket.
D=0.1:0.01:0.5;
H=[];
for i=1:length(D);
atm=D(i);
h1=program(atm);
H(i)=h1;
end
A 6. gyakorlatban bemutatott metszetes ábrázolás természetesen ebben a feladatban is leképezhető. Definiálni kell a Data sets alatt egy új Cut line-t, majd beállítani a metszetet. Ebben az esetben a fal mellett definiálunk egy metszetet, és több paraméter értéknél vizsgáljuk a hőmérsékletprofilokat.
model.result.dataset.create('cln1', 'CutLine2D');
model.result.dataset('cln1').setIndex('genpoints', '0', 1, 0);
model.result.dataset('cln1').setIndex('genpoints', '0.24', 0, 0);
model.result.dataset('cln1').setIndex('genpoints', '0.24', 1, 0);
model.result.dataset('cln1').setIndex('genpoints', '1', 1, 1);
model.result.dataset('cln1').run;
Az ábrázoláshoz egy 1D PlotGroup-ra van szükség, aminek a segítségével vonalas ábrán tudjuk ábrázolni az adatsorainkat.
model.result.create('pg1', 'PlotGroup1D');
model.result('pg1').run;
model.result('pg1').set('data', 'cln1');
model.result.dataset('cln1').set('data', 'dset1');
model.result('pg1').run;
model.result('pg1').feature.create('lngr1', 'LineGraph');
model.result('pg1').run;
A kapott eredményeket ezután MATLAB környezetbe tudjuk leírni, így jóval kezelhetőbb adatsorokat kapunk. A kapott eredményeket az A.19. ábra szemlélteti. Látható, hogy a szigetelés vastagságának növelésével egy darabig nő a fal melletti hőmérséklet, majd elér egy közel állandó profilt, körülbelül 0.3 m vastagság után. Efölött a vastagság fölött már nincs hatása a szigetelés további növelésének.
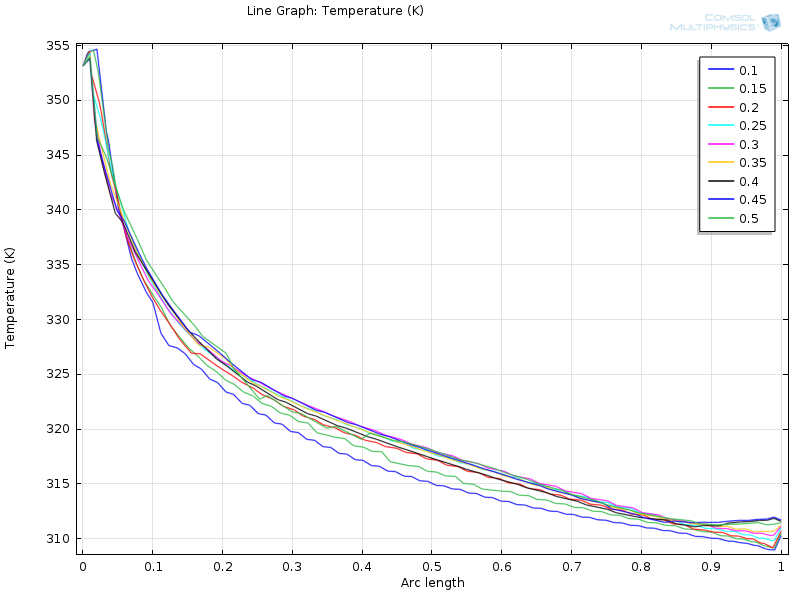
Természetesen a Livelink alkalmazásának ez egy egyszerű példája volt. Használható bonyolultabb geometriák létrehozására, több paraméter vizsgálata, valamint még szélsőértékkeresési problémák megoldására is. Ami mindegyik esetben fontos, hogy gondoljuk át, és minél letisztultabb módon építsük meg a CM modellünket, majd ebből származtassuk az m fájlt. Ezt elősegíthetjük a CM File/Reset history menünpont alkalmazásával, melynek során az egyes tévutakat, valamint visszavonásokat, és újradefiniálásokat eliminálhatjuk a modellből.
A.8. Hőmérő elhelyezés vizsgálata
Ebben a komplex modellben felhasználjuk az eddig tanultakat a CM és a Livelink területén. Ezt a példát bonyolultsága miatt összegezve mutatjuk be a már ismert lépések kihagyásával. A tanult módszerek alkalmazásával, valamint az itt bemutatott kiegészítő lépések leképezésével a modell teljes egészében leképezhető.
A méréstechnikában hőmérő elhelyezés kapcsán ismert tény, hogy a hőmérőket áramlással szemben kell elhelyezni, minél jobban benyúlva az adott berendezésbe. Tipikusan csőkönyökökben szokták ezeket a hőmérőcsonkokat kialakítani. Ebben a feladatban különböző hőmérő pozíciók és kialakítások hatását vizsgáljuk a hőmérséklet mérés pontosságára. A fizikai rendszer esetében itt nem tehetjük meg azt az egyszerűsítést, hogy hengerszimmetrikus rendszer alkalmazunk, mivel ezt mind a csőkönyök, mind a hőmérő pozíciók vizsgálata kizárttá teszi. Az A.20. ábra a kialakított geometriát mutatja. A csőkönyök egyik oldalán betáplálunk, másik oldalán elvételt definiálunk. A mérőperemes példától eltérően itt nem tehetjük meg azt, hogy eltávolítjuk a törőlemezként viselkedő hőmérőcsonkot, mivel ebben az esetben a hőmérsékletmérés ezen a szilárd testen belül fog történni. A hőmérő elhelyezés vizsgálatához egy négyszögletű tartományt definiáltunk, ehhez a tartományhoz viszonyítva fogjuk vizsgálni a hőmérséklet mérés pontosságát.
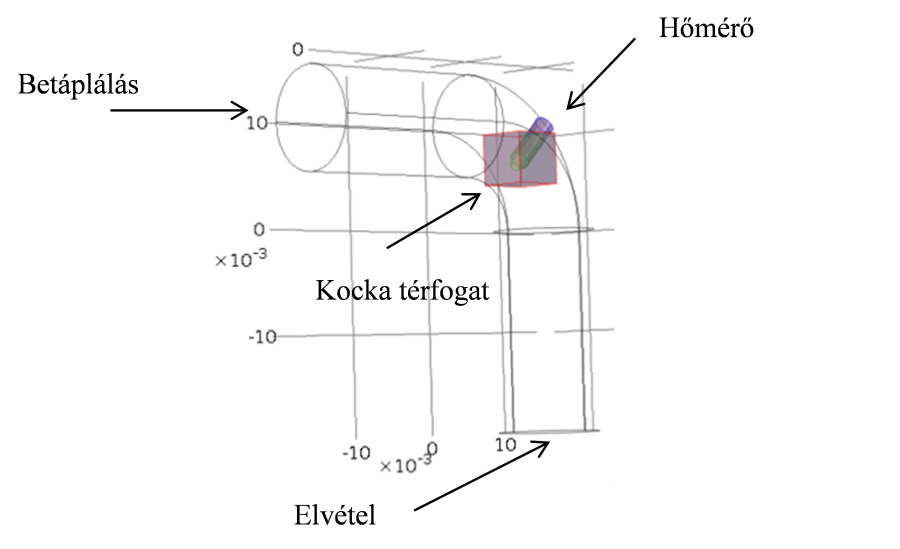
Áramló folyadékként vizet, a hőmérő szilárd anyagaként pedig rezet definiáltunk. Az anyagi tulajdonságok számításához ebben az esetben a CM program beépített anyagi tulajdonság könyvtárát alkalmaztuk. A következő paraméterek voltak szükségesek:
dinamikus viszkozitás (víz)
sűrűség (víz)
hővezetés (víz, és réz)
hőkapacitás (víz, és réz)
A hőmérséklet mérést egy úgynevezett Domain Point Probe definiálásával tehetjük meg. A hőmérséklet mérési pont definiálása a Definitions/Probes/Domain Point Probe paranccsal tehető meg. Ezek a pontszerű mérési lehetőségek nagyon jól használhatóak a hőmérséklet mérések mellett a modell futásának nyomon követésére. Alapértelmezett beállítás, hogy a pontszerű mérés változását a konvergencia diagramok mellett megjeleníti a program, így nyomon követhető az adott állapotváltozó változása, és nem megfelelő működés esetén leállítható a megoldás.
Ebben az esetben a nagyobb modell komplexitás, valamint a két mérleg jellege miatt két külön lépésre választjuk szét a megoldást. Az impulzusmérleget stacioner állapotban számoljuk, majd egy új megoldásban számítjuk a hőmérlegek megoldását egy dinamikus vizsgálatban végezzük. A dinamikus vizsgálatnál az impulzusmérleg változóit átvesszük a stacioner impulzusmérleg megoldásából (Study2/Time Dependent/Values of Dependent variables/Values of variables not solved for/Method=>Solution/Study=>Study1). Emellett a betáplálási hőmérséklet peremet lépcsőszerűen változtatjuk (Definitions/Functions/Step). Ezután lefuttatjuk a modellt, és elemezzük a dinamikus modell megoldását. Az A.21. ábra a) az áramlási képet mutatja a csőkönyökben, míg a b) ábra a hőmérsékleti képet mutatja. Mindkét modellt 3D-ben oldottuk meg, a 2D megjelenítés csak a jobb érthetőséget szolgálja.
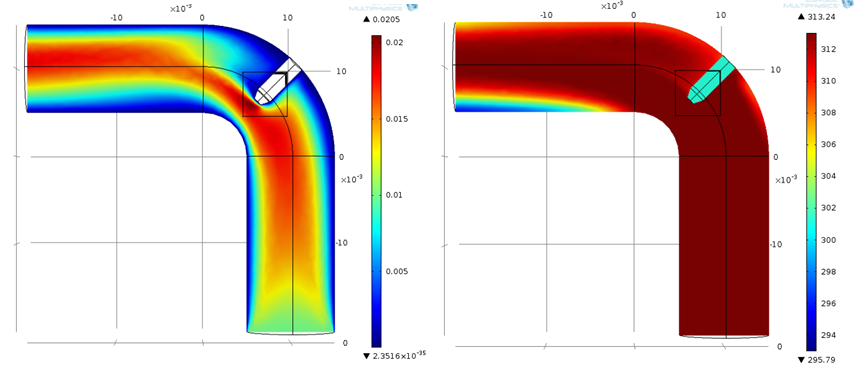
a) Az áramlási kép a csőkönyökben (m/s) . b) A hőmérsékleti tér a csőkönyökben (K)
A kifejlesztett modellben vizsgáltuk a mérési pont és a szondát körülvevő tér integrált hőmérsékletének a különbségét különböző betáplálási sebességeknél. Az eredményeket az A.22. ábra mutatja. Látható, hogy habár egy bizonyos sebességérték felett minimálisra csökken az eltérés, még mindig lesz valamennyi holtidő, amivel számolni lehet.
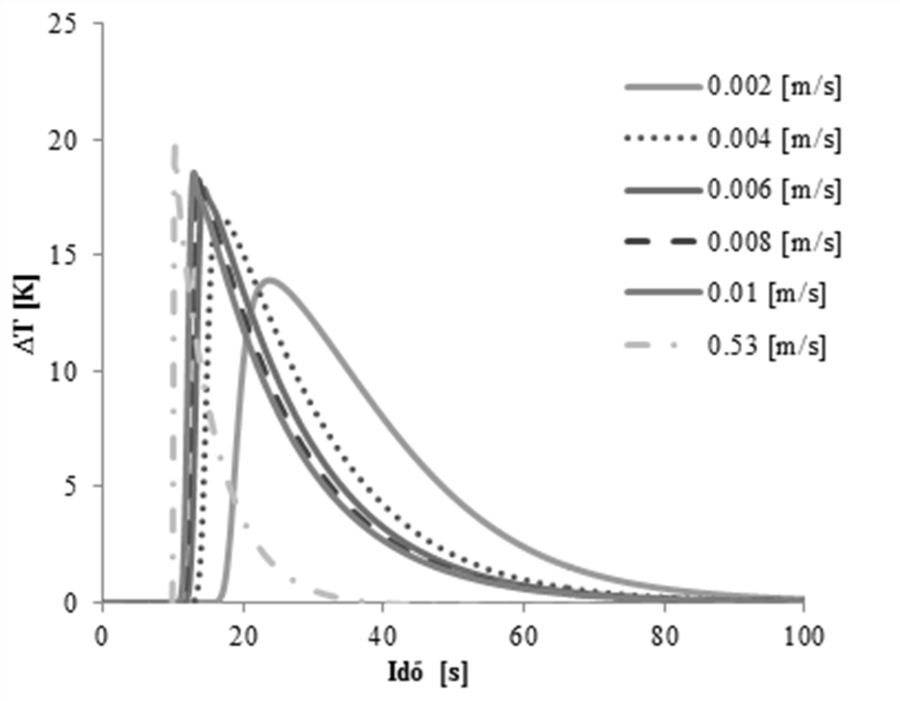
Az eredmények után tekintsük át azokat a külön részeket, amelyek megkülönböztetik ezt a modellt az előző feladattól. Az előző modell esetében egy egyszerű problémát oldottunk meg, ahol a geometria egy paramétere változott. Ebben az esetben három különböző szondageometriát vizsgálunk (sima, gömb, kúpos), valamint ezek különböző pozícióit. Ezek lesznek alapvetően azok a változók, amiket létre kell hozni. Ahhoz, hogy a geometriákat egyszerűen tudjuk kezelni, minden egyes szondaformát megrajzoltunk a CM felhasználói felületét alkalmazva (.mphbin kiterjesztés). Ezután ezeket a geometriákat fogjuk importálni a ciklus egyes lépéseiben. Emellett külön problémát jelent, hogy az egyes geometriák esetén különböző számú és azonosítójú peremet kell kezelnünk, ezért ezeket a peremeket definiálni kell minden egyes geometria esetén.
p=1;
n = {'gomb1.mphbin'};
x=3; % a különböző alakú elemek száma
for i2=1:x
q=num2str(i2)
k=horzcat('gomb',q)
k=horzcat(k,'.mphbin')
if i2==1
gomb_bound=[13 14 15 16 21 22 23 24];
gomb_bound_mesh_plot=[2 3 4 5 6 7 8 9 10 11 13 14 15 16 19 20 21 22 23 24];
elseif i2==2
gomb_bound=[13 14 15 16 19 22 23 24 25];
gomb_bound_mesh_plot=[2 3 4 5 6 7 8 9 10 11 13 14 15 16 19 20 21 22 23 24 25];
else
gomb_bound=[13 14 15 20 21];
gomb_bound_mesh_plot=[2 3 4 5 6 7 8 9 10 11 13 14 15 16 19 20 21];
end
Ami még újdonságot jelent az eddigiekhez képest az a Domain Point Probe definiálása. Ezt egy mérési pontot kell létrehozni a geometria megfelelő részén, majd társítani kell a megoldáshoz. Fontos megadnunk a koordinátáit ennek a mérési lehetőségnek, valamint a kiértékeléséhez egy numerikus értékelést (pev1) is létre kell hoznunk. Ezután a kapott eredményeket egy táblázatban tároljuk. Ami ebben az esetben különbség az előző példához képest, hogy itt nem függvényként kezeljük a CM megoldást, hanem egy fájlban számolunk. Így alkalmaznunk kell az egyes elemek eltávolítását (.remove) is, mivel minden esetben létrehozzuk az új elemeket (geometriát, hálót, megoldást stb.). Természetesen az itt közölt módszerek csak lehetőségek, többféleképpen oldhatunk meg egy adott problémát.
model.probe.create('pdom1', 'DomainPoint');
model.probe('pdom1').model('mod1');
model.probe('pdom1').setIndex('coords3', '0.01', 0, 0);
model.probe('pdom1').genResult('sol1');
model.result.numerical('pev1').set('table', 'tbl1');
model.result.numerical('pev1').set('innerinput', 'all');
model.result.numerical('pev1').set('outerinput', 'all');
model.sol('sol1').updateSolution;
model.probe('pdom1').genResult('sol1');
model.result.numerical('pev1').set('table', 'tbl1');
model.result.numerical('pev1').set('innerinput', 'all');
model.result.numerical('pev1').set('outerinput', 'all');
model.probe('pdom1').feature('ppb1').set('expr', 'T');
model.probe('pdom1').feature('ppb1').genResult('sol1');
model.result.numerical('pev1').set('table', 'tbl1');
model.result.numerical('pev1').set('innerinput', 'all');
model.result.numerical('pev1').set('outerinput', 'all');
model.result.numerical('pev1').setResult;
a=model.result.table('tbl1').getReal;
P(:,p)=a(:,2);
p=p+1;
Valamint az eredményeket itt egy futóindex segítségével számítjuk, és egy táblázatba gyűjtve tudjuk majd ábrázolni ebből a mátrixból.
A kapott eredmények azt a tapasztalatokat tükrözik, miszerint a megfelelő hőmérő pozíció az áramlási iránnyal szemben elhelyezkedő eset. Kiemelt szerepe a mérőegység kialakításának (gömb, sima, kúpos) nincsen. Természetesen ezek mellett a paraméterek mellett vizsgáltuk a betáplálási sebesség hatását is, azonban ezeknek az eredményeknek részletes bemutatására most nem térnék ki. Annyi mindenképpen kijelenthető, hogy a CM szoftver MATLABbal csatolva a következő előnyöket biztosítja:
stabilabb, gyorsabb működés
ciklusba szervezhetőség
az egyes változók, geometriák, valamint a teljes megoldás könnyebb manipulálhatósága
eredmények kiértékelése, vizsgálata részletesebb módon MATLAB környezetben
grafikák, diagramok vektoros kezelése
akár szélsőérték keresési és optimalizációs problémák megoldása kihasználva mindkét környezet lehetőséget
Ezáltal olyan keretrendszerek hozhatóak létre, melyek segítséget nyújthatnak komplex mérnöki feladatok megoldásában. Hátrányként talán a programnyelv sajátságait lehetne említeni, azonban könnyen belátható, hogy az egyfajta hibrid CM-MATLAB szintaktika nem bonyolult, valamint nem is tartalmaz olyan sok parancsot, ami miatt elsajátíthatósága nagy nehézségekbe ütközne.