4. fejezet - A futóművek jellemzői paraméterei
A futóművek vizsgálatakor, minősítésekor használatos geometriai, dinamikai jellemzők, paraméterek:
-
Alap paraméterek:
-
Kerékdőlés (γ),
-
Kerékösszetartás (ν,αν),
-
Csapterpesztés (δ),
-
Csaphátradőlés (ε),
-
Utánfutás (na),
-
Kormánylegördülési sugár (R0),
-
Nyomtáv (B),
-
Tengelytáv (L)
-
-
Leszármaztatott paraméterek:
-
Billenési momentán centrum,
-
Momentán tengely,
-
Bólintási centrum,
-
Kerékdőlés változás,
-
Összetartásváltozás,
-
Nyomtávváltozás.
-
Az alapparamétereket statikus paramétereknek, néha nullgeometriának is nevezik, mivel ezeket a jármű álló helyzetében lehet megmérni, beállítani.
A leszármaztatott paramétereket dinamikus paraméterként is említi a szakirodalom.
4.1. Alapparaméterek
4.1.1. Kerékdőlés (γ)
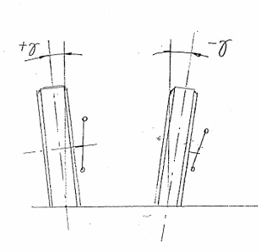
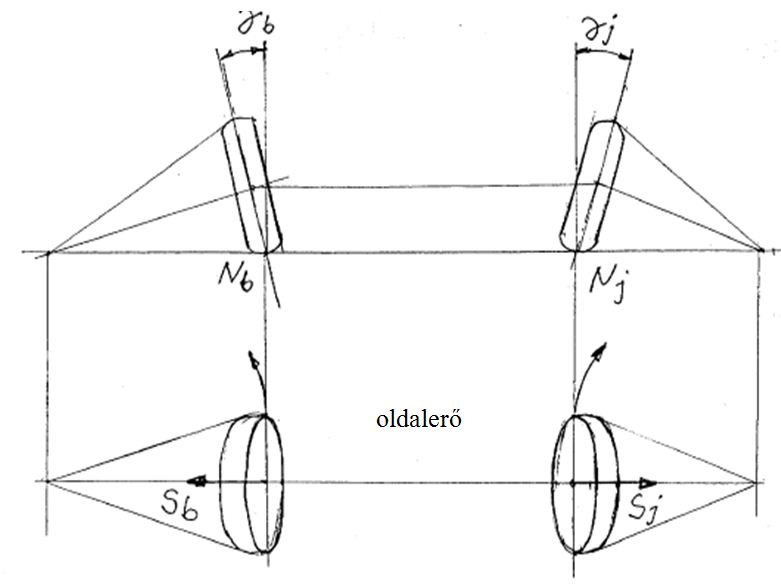
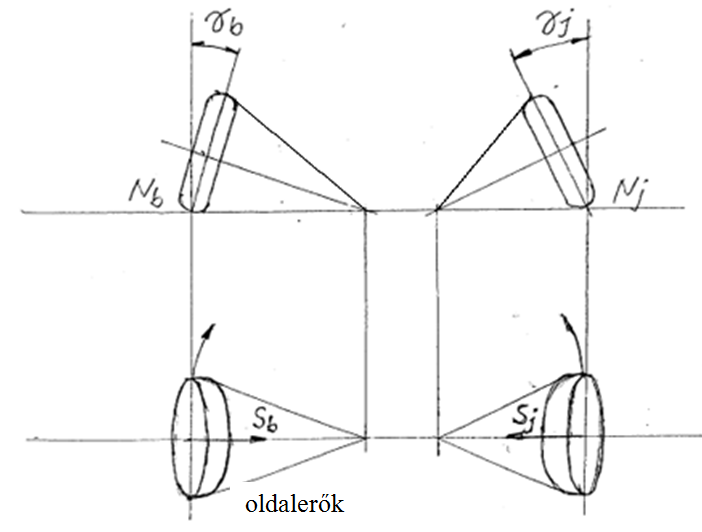
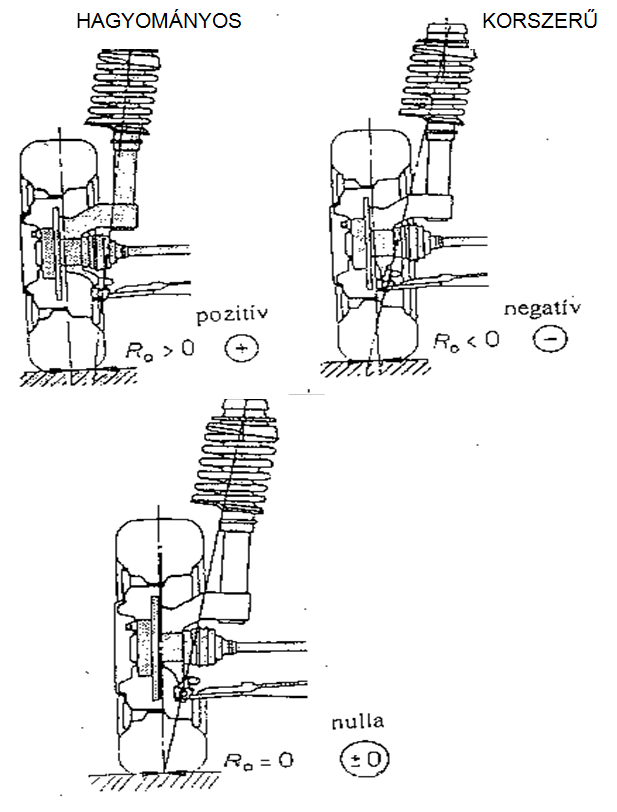
A kerékdőlés a korszerű gépjárműveknél a legfontosabb, egyben sok vitát kiváltó paraméter. A nagyobb teljesítményű személygépkocsiknál és valamennyi versenyautónál negatív értékek jellemzőek (4.1. ábra). Más a követelmény a kerékdőléssel szemben kanyarodáskor és egyenes haladáskor. Kanyarodás közben a külső keréknek a keresztirányú álterhelődés következtében megnő a függőleges terhelése, vagyis dominánssá válik. A negatív dőlésszögű külső kerék így a nagyobb leszorító erő és a negatív dőlésszög miatt nagyobb oldalerőt képes felvenni akár két - , háromszorost is. A belső oldali kerék is negatív szögű a kocsitesthez viszonyítva, de a kerék teteje kifelé dől a kanyarodás középpontjához viszonyítva, így az oldalerő felvétel szempontjából pozitívszögűnek minősül, ami kedvezőtlen a jármű kanyarstabilitására. A korszerű, intelligensnek nevezhető futóműveknél ezért elsődleges szabályozási cél a belső kerekek dőlésszögének változtatása a kocsitesthez viszonyítva pozitív irányba, vagyis a kerék tetejét a kanyar középpontja felé dönteni. A meghatározott célfüggvény szerinti kerékdőlés szabályozását a kocsitest billenésére és az oldalerő növekedésére reagáló felfüggesztési rendszerrel lehet megvalósítani.

Egyenes haladáskor a döntött kerekek köríven akarnak gördülni, de a két kerék ellentétes irányba, így kénytelenek egyenesen haladni, ez a gumiabroncs deformálódásához vezet. Ezt kikényszerített ferdefutásnak nevezzük. (lásd részletes ismertetését a kormányzás kiegészítés fejezetben). Ha a gumiabroncs ezt a ferdefutást nem képes oldalrugalmasságából adódóan kiegyenlíteni, akkor gumikopás és a tapadási erő csökkenése következhet be. Mindezekből következően egyenes haladáskor a 0 kerékdőlés kedvező lenne, de a kanyarstabilitási igény ezzel ellentétes. Intelligens futómű igazodik az ellentétes követelményekhez, viszont a nem szabályozott futóműveknél már kompromisszumot köt a konstruktőr.
Korszerű személygépkocsiknál az első futómű kerékdőlési szöge 0° - (-0,5°) közötti, a hátsó futóművé (-1°) – (-2°) közti értékű. Általános követelmény, hogy egy futóművön a két keréknek azonos legyenek a kerékdőlési szöge, már 0,1 – 0,2° eltérés esetén a jármű félrehúz.
Pozitív kerékdőlés:
Negatív kerékdőlés:
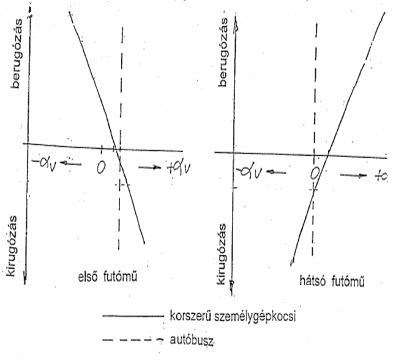
4.1.2. Kerékösszetartás
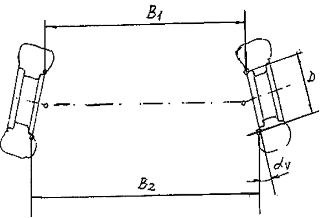
ahol, αv = összetartási szög egy kerékre vonatkoztatva.
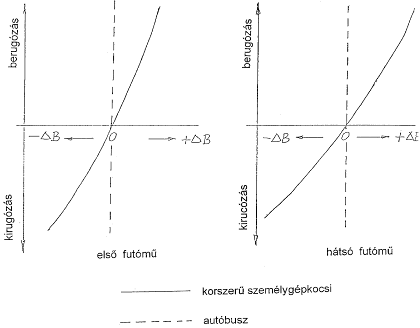
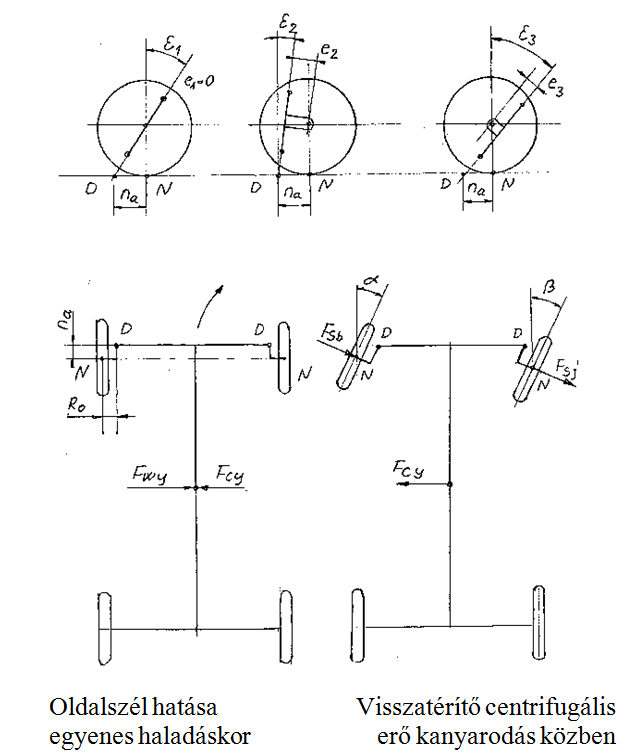
A korszerű személygépkocsiknál a kerékösszetartás értékei nagy szórást mutatnak. Az első futóműnél általánosan 0° - 0,5°, a hátsó futóműnél 0,5° - 1° a leggyakoribb érték. Az alapösszetartás ugyanis számos tényezőtől függ így többek között a kerékdőléstől, a kerékdőlés elkormányzás közbeni változásától, a nyomtáv változásától, a hajtásrendszertől az összetartás menetközbeni változtatásától, az úgynevezett csapgeometriáról (ld. később). Az első futóműnél az összetartás a jármű sajátkormányzási tulajdonságát az oldalgyorsulástól függően a túlkormányzás felé változtatja, amíg a hátsó keréknél az alulkormányzás felé. A 4.6. ábra az első kerekek összetartásának hatását mutatja. Figyelembe véve a kerékterhelés kanyarodás közbeni változását, vagyis azt a szabályt, hogy kanyarodáskor a külső kerekek válnak dominánssá, jól látható, hogy a kanyarodás középpontja befelé tolódik, vagyis a kanyarodási sugár csökken.
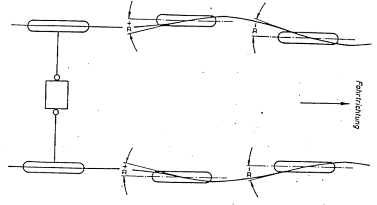
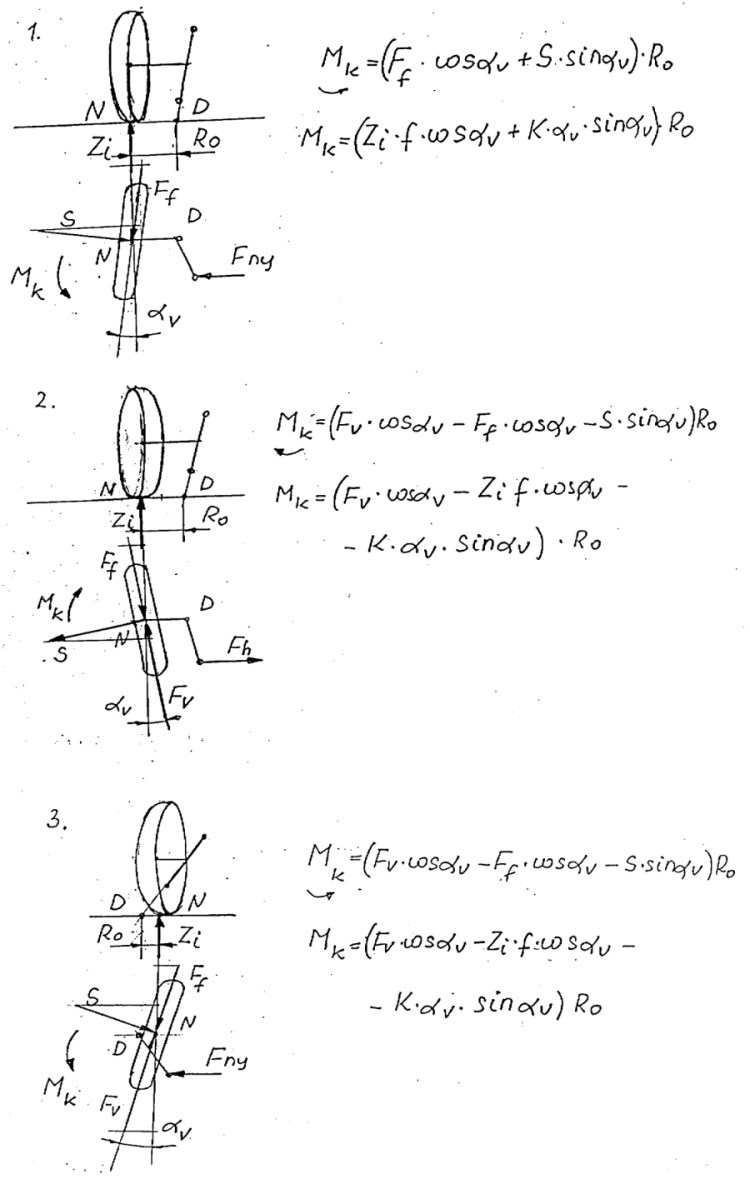
A kerékösszetartás dinamikai hatásai a jármű egyenes haladásakor elsősorban a kerekek elkormányzási sugarából (l. később) és a hajtásrendszertől függően változik. Ezt a 4.7. ábra sorozatképei jól szemléltetik.
-
1. eset: hátsókerék hajtású jármű +R0 érték mellet. A kerekekre kifelé irányuló kormányzási nyomaték hat, ezért célszerű a kerekeket összetartás felé beállítani.
-
2. eset: elsőkerék hajtású jármű, +R0 érték. A kerekekre befelé irányuló kormányzási nyomaték hat, így a kerekeket széttartás felé kell beállítani.
-
3. eset: elsőkerék hajtású jármű, -R0 érték. A kerekekre kifelé irányuló kormányzási nyomaték hat, a kerekeket összetartás felé szükséges beállítani. Korszerű személygépkocsikra a 3. eset jellemző.
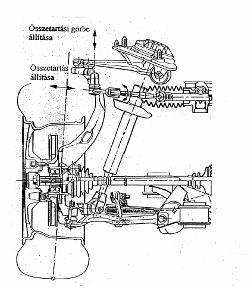
4.1.3. Csapgeometria
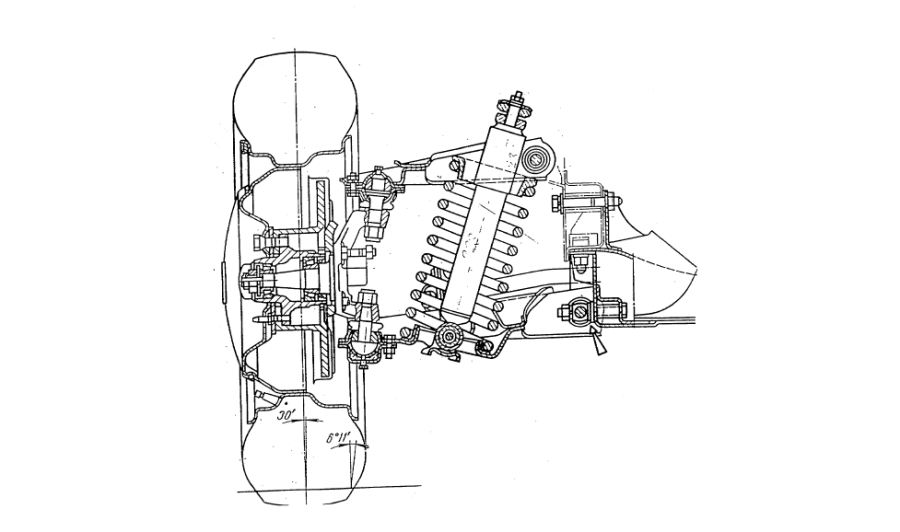
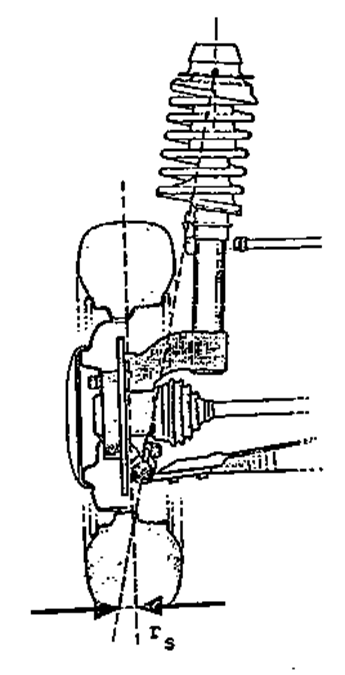
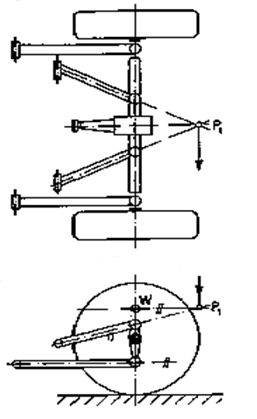
A kormányzott kerekek kényszerkormányzáskor vagy önkormányzáskor a függőlegeshez közelálló tengely körül elfordulnak. Ezt a tengelyt nevezzük elkormányzási tengelynek. Ez lehet valós (4.8. ábra), mint például a merev hidas futóművek függőcsapszegének középvonala (innen ered a csapgeometria, csapterpesztés, csaphátradőlés elnevezés) vagy lehet virtuális. Az alsó – felső gömbcsuklós tengelycsonk esetén a gömbcsuklók középpontját összekötő egyenes az elkormányzás tengelye (4.9. ábra). A McPherson futóműveknél (4.10. ábra) az alsó gömbcsukló közepét és a támcsapágy deformációs középpontját összekötő egyenes körül fordul el a tengelycsonk. A dupla csuklós futóműveknél (ld. Audi 4-6-8; 4.11. ábra) a tengelycsonk alsó és felső nyúlványai a lengőrudak által meghatározott pillanatnyi középpontok (momentán centrumok) körül fordulnak el (4.12. ábra). Miután a kerék ki – berugózása és a rudakra ható oldalerők következtében a momentán centrumok állandóan változnak, így az elkormányzás tengelye is állandóan változik, vagyis ez a tengely virtuális és momentán.
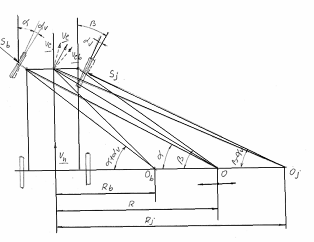
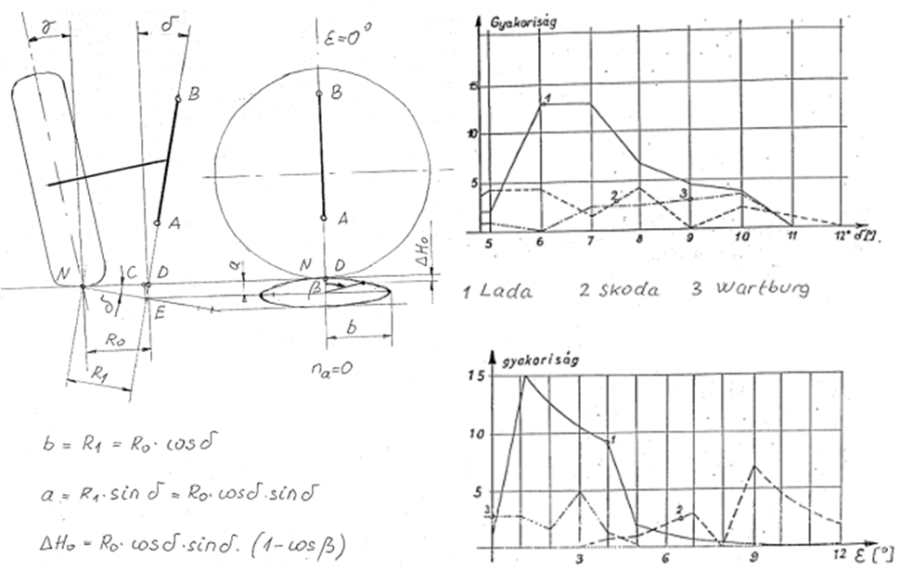
Az elkormányzási tengely dőlésszögei és a keréktalppont (N) és az elkormányzási tengelynek az útfelülettel alkotott dőléspontja (D) közti távolságok alkotják a csapgeometriát. (4.13. ábra, 4.14. ábra)
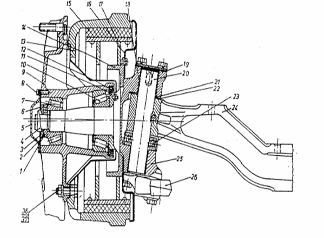
1 – csapágyanya; 2 – zárógyűrű; 3 – zárótárcsa; 4 – anya; 5 – kerékagy sapka; 6 – tömítés; 7 – külső csapágy; 8 – csavar; 9 – kerékagy; 10 – belső csapágy; 11 – támgyűrű; 12 – tömítőgyűrű; 13 – fékdob; 14 – féktartó; 15 – fékbetét; 16 – féktartó lemez; 17 – fékpofa; 18 – tengelycsonk persely; 19 – tömítés; 20 – tengelycsonk csapszeg; 21 – szabályozó tárcsa; 22 – tárcsa; 23 – tengelycsonk csapágy; 24 – tengely; 25 – tengelycsonk; 26 – nyomtávkar, bal
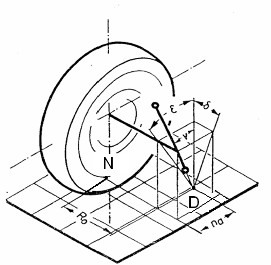
δ – csapterpesztés; ε – csaphátradőlés; R 0 - kormánylegördülési sugár (elkormányzási sugár); n a - utánfutás
Csapterpesztés, kormánylegördülési sugár (elkormányzási sugár)
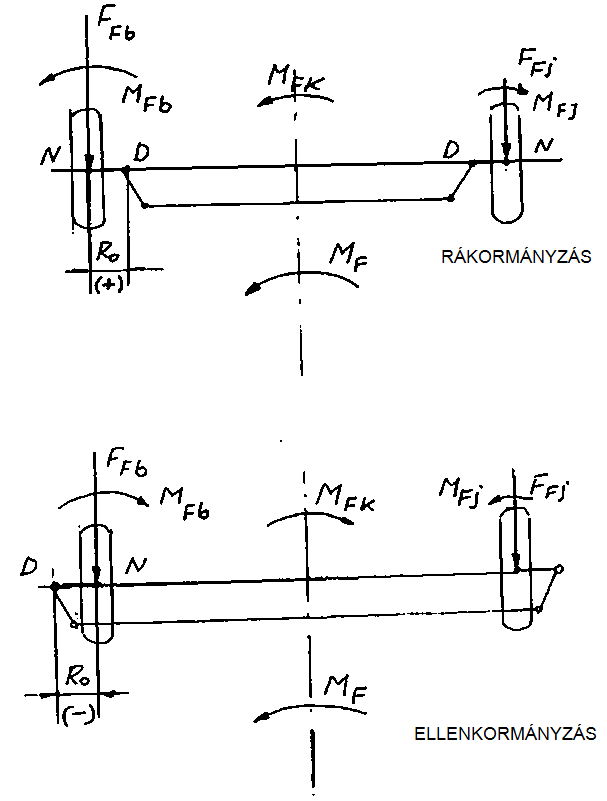
M F – a járműre ható elfordító nyomaték, M FK – az egyenlőtlen kerékerőkből adódó elkormányzási nyomaték
Csaphátradőlés és utánfutás:
A csaphátradőlés hatására elkormányzáskor a külső kerék teteje befele, a belsőjé kifelé dől, ez javítja a kanyarstabilitást. Az utánfutás következtében a kerekek a menetirányba igyekeznek beállni.
4.2. Leszármaztatott paraméterek
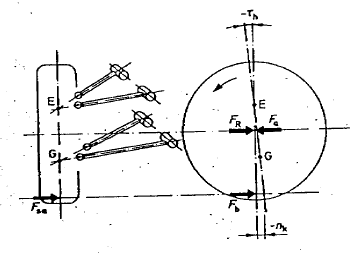
4.2.1. Billenési momentán centrum
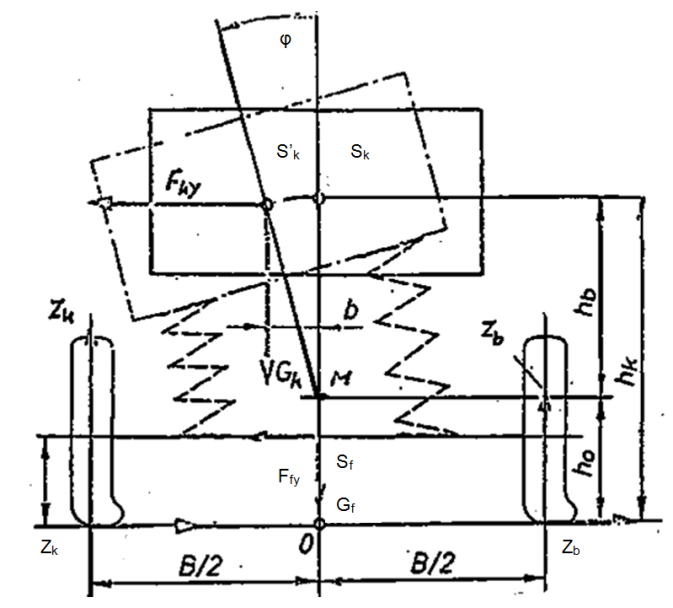
SK – a kocsitest súlypontja; Sf – a futómű súlypontja; Gk – a kocsitest súlya; Gf – a futómű súlya; M – a billenési momentán centrum; Zk – a külső kerék terhelése; Zb – a belső kerék terhelése; Fky – a kocsiestre ható oldalerő; Ffy – a futóműre ható oldalerő.
A kocsitestre ható oldalerő (ez lehet kanyarodás közbeni centrifugális erő, oldalszél, oldallejtő) következtében a kocsitest megbillen ψ szöggel a pillanatnyi középpont (momentán centrum) körül. A billenés következtében a kocsitest súlypontja oldalra, b távolságra eltolódik. Ennek hatására megváltozik mindkét kerék függőleges terhelése, bekövetkezik a már bemutatott első és második átterhelődés:
Az egyenletek azt mutatják, hogy amennyivel csökken a belső kerék függőleges terhelése ugyanannyival növekszik a külső kerék terhelése. A kerék függőleges terhelése és az általa felvehető oldalerő közt viszont nem lineáris, hanem degresszív az összefüggés. Például ha a külső kerék függőleges terhelése kétszeresére nő, akkor az általa felvehető oldalerő nem kétszeresére, hanem másfélszeresére növekszik. Vagyis az átterhelődés következtében oldalerő vesztesség lép fel, ami a jármű kanyarodás stabilitását csökkenti. Tehát a felépítmény oldalbillenése kedvezőtlen jelenség, azt mérsékelni kell.
Az oldaldőlés csökkenthető:
-
rugók merevítésével (de a lengéskényelmi követelmények korlátozzák);
-
a rugóbázis növelésével;
-
a kocsitest súlypontjának csökkentésével;
-
a momentán centrum emelésével;
-
keresztstabilizátor beépítésével;
-
számítógépes felépítmény szabályozással (ABC, Active Body Control – rendszer).
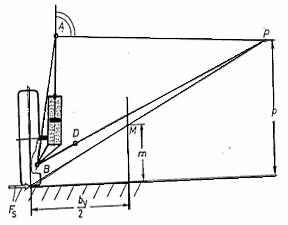
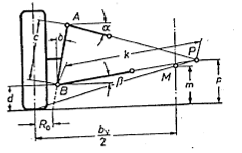
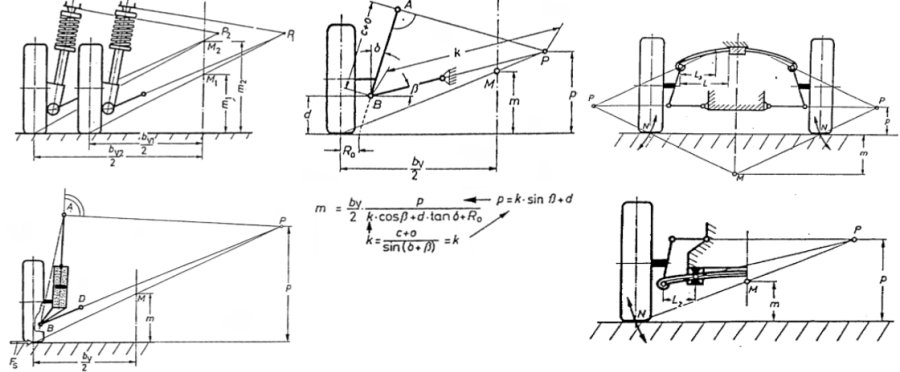
A billenési momentán centrum magassága függ a futómű típusától és a felfüggesztés geometriai kialakításától. A momentán centrum meghatározható szerkesztéssel és számítással. A szerkesztés lényege, hogy először meghatározzuk a kerék talppontjának mozgásirányát a felépítmény billenése közben, majd a mozgásirányra merőleges egyenest húzva az kimetszi a futómű függőleges szimmetria tengelyén a momentán centrumot. A legjellemzőbb futómű típusok momentán centrumainak szerkesztése (4.19. ábra - 4.24. ábra):
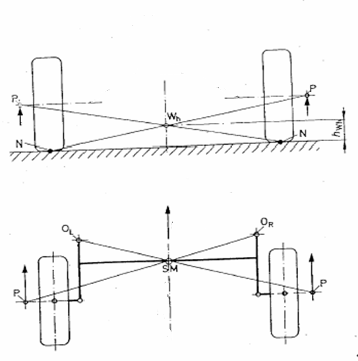
4.2.2. Billenési momentán tengely
Az első és a hátsó futómű billenési momentán centrumát összekötve kapjuk a jármű billenési momentán tengelyét. (4.25. ábra)
A momentán tengely helyzete lehet:
-
előre lejt, az első futómű billenési merevsége kisebb, mint a hátsó;
-
hátrafelé lejt, az első futómű billenési merevsége nagyobb, mint a hátsóé;
-
vízszintes, a futóművek billenési merevsége azonos.
Az első és hátsó futómű oldalbillenési merevségének aránya befolyásolja a jármű sajátkormányzási tulajdonágainak változását az oldalgyorsulás függvényében. Ha a billenési momentán tengely előre lejt, akkor a jármű sajátkormányzása az alulkormányzottság felé változik, ha hátrafelé lejt a változás a túlkormányzottság felé mutat.
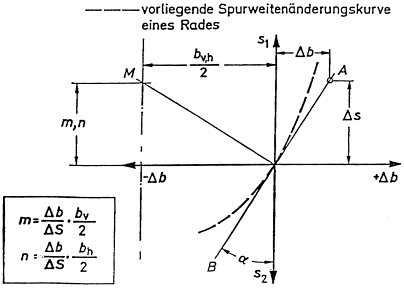
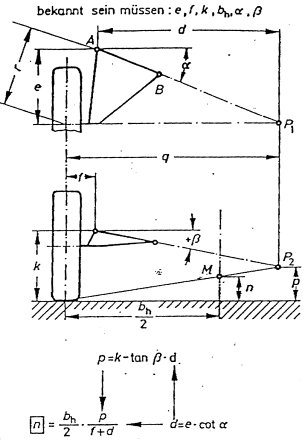
A jármű billenési momentán centrumát egyszerűen geometriai számítással is meghatározhatjuk, ha ismerjük a jármű egy kerekére vonatkoztatott nyomváltoztatási karakterisztikáját. Ez a karakterisztika tulajdonképpen a kerék talppont mozgási pályáját írja le a kerék ki-berugózásakor. A pálya adott pontjához húzott érintő a mozgás irányát (a sebességvektort) adja, amelyre húzott merőleges sugár a futómű szimmetriai „z” tengelyében kimetszi a momentán centrumot (4.26. ábra).
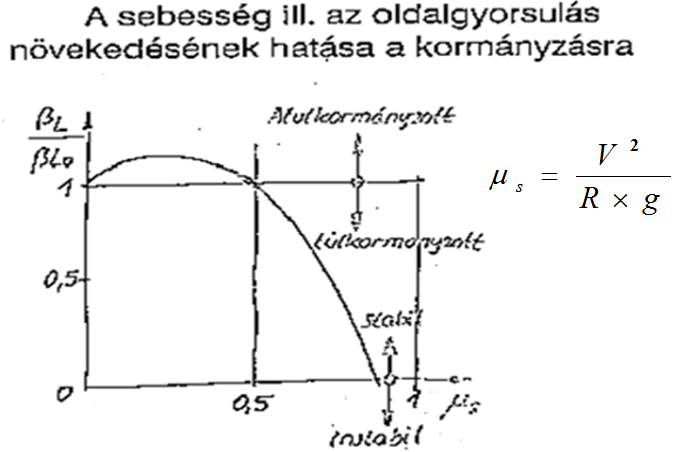
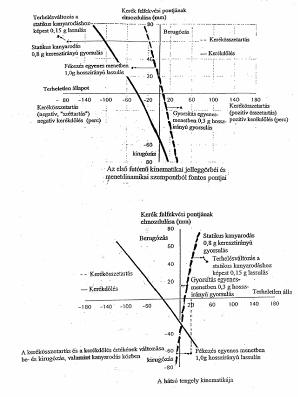
A jármű sajátkormányzási tulajdonságának változását legszemléletesebben a Mitschke-féle diagramon lehet bemutatni. (4.27. ábra) Ezt a diagramot az úgynevezett körteszt eredményei alapján lehet megszerkeszteni. A jármű 100 m átmérőjű körpályán halad, 5 km/h sebességlépcsőben növekvő, de egy lépcsőn belül körönként állandó sebességgel. Mérni kell a sebességet és a kormánykerék elfordítási szögét. A kiindulási értéket lépésben haladva (2-3 km/h) kell felvenni. A diagram vízszintes tengelye a fajlagos oldalgyorsulást mutatja, a függőleges tengely a tényleges és a lépésben felvett kormánykerék elfordítási szög hányadosát. Számos teszt és országúti vizsgálat azt mutatja, hogy a legbiztonságosabb a jármű, ha alulkormányzott és ez a tulajdonsága 0,5 g fajlagos oldalgyorsulás alatt nem változik.
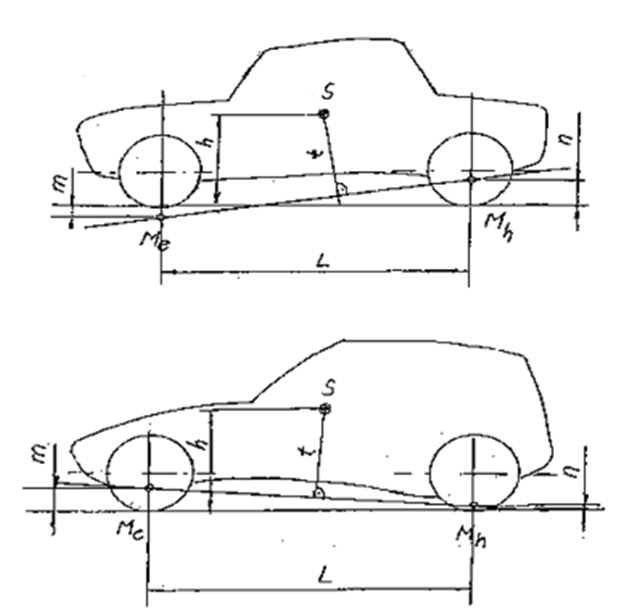
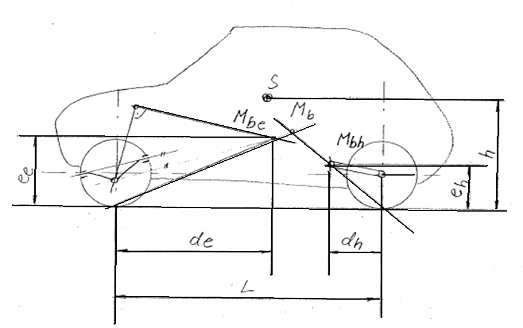
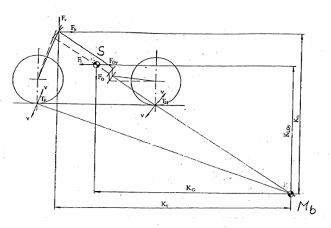
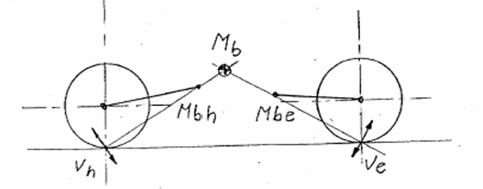
4.2.3. Bólintási centrum
A jármű felépítménye fékezéskor vagy gyorsuláskor a tehetetlenségi erő hatására a bólintási centrum körül elfordul. (4.28. ábra) Ennek következtében a felépítmény súlypontja elmozdul előre, illetve hátra, aminek következtében megváltoznak a függőleges tengelyterhelések.
Ahol
|
Ze |
– az első tengelyterhelés; |
|
|
Zh |
– a hátsó tengelyterhelés; |
|
|
Zest |
– az első tengely statikus terhelése; |
|
|
Zhst |
– a hátsó tengely statikus terhelése; |
|
|
FT |
– tömegerő; |
|
|
h |
– a súlypont magassága; |
|
|
L |
– a tengelytáv; |
|
|
Gh |
– a kocsitest súlya (N); |
|
|
a |
– a súlypont hosszirányú elmozdulása. |
A hosszirányú átterhelődés is káros hatású, a tapadási erő csökkenéséhez vezet, aminek következtében romlik a jármű menetstabilitása. Az átterhelődés a bólintási centrum emelésével csökkenthető. A bólintási centrum magassága a futóművek típusától, a felfüggesztés geometriájától függ.
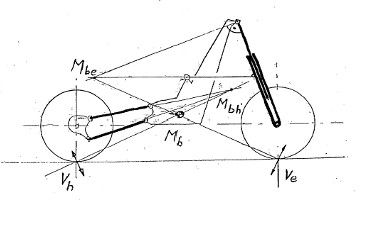
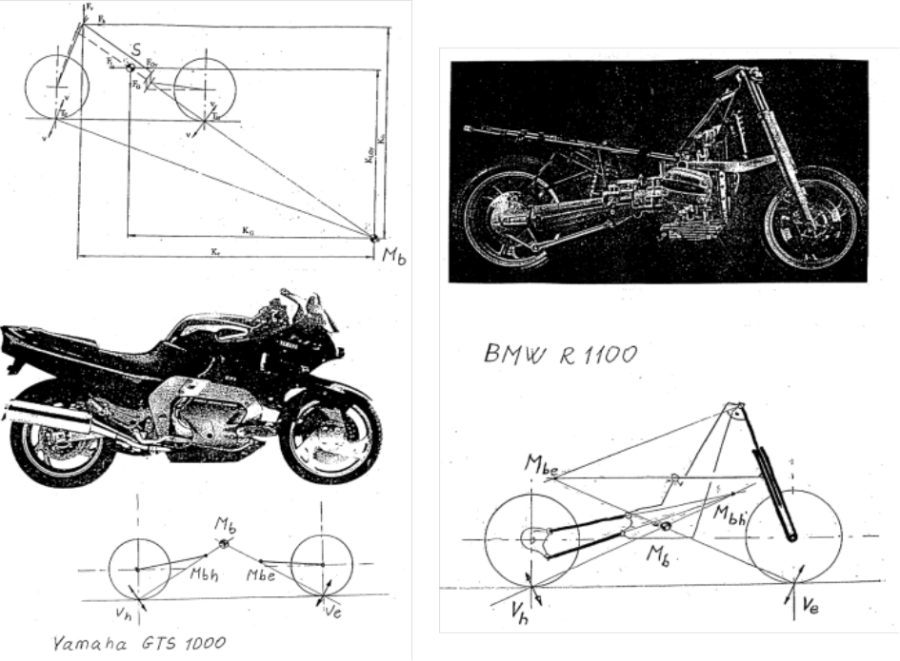
A bólintás csökkenthető a rugók merevségének növelésével természetesen a rugózási kényelem megszabta keretek közt. Az ABC szabályozó rendszer a bólintó mozgást is figyeli és akadályozza. A bólintás különösen a motorkerékpárok stabilitását befolyásolja. A különböző típusú motorkerékpár felfüggesztéseket elsősorban a bólintási centrum emelésének céljával fejlesztették. (4.29. ábra - 4.32. ábra)
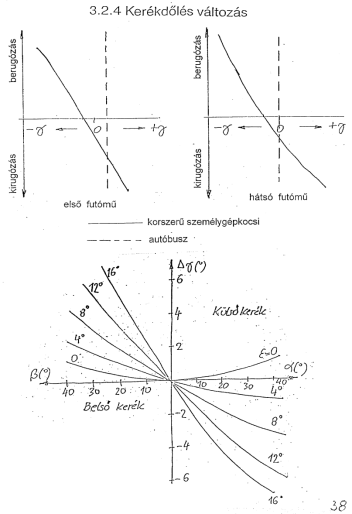
4.2.4. A kerékdőlés változás
A korszerű járművek futóműveinek kerékdőlése vagy külső számítógépes szabályozással vagy önszabályozással változtatható a jármű stabilitásának megtartása vagy növelése érdekében. A szabályozás célfüggvényének kimenő paramétere azonos: a kanyar külső oldalán a kerékdőlést negatív, a belső oldalán pozitív irányba kell változtatni. Számítógépes külső szabályozáskor ezt a változtatást a jármű stabilitását meghatározó több paraméter függvényében lehet megadni, mint például a jármű sebessége, a különböző irányú gyorsulásai, a tapadási tényező változásai, stb. Az önszabályozós intelligens futóműveknél a kerékdőlés leggyakoribb esetben a kerék és a felépítmény közti elmozdulás, vagyis a kerék ki-, berugózása függvényében változik. A felépítmény kanyarodás közbeni billenése következtében a külső kerék berugózik, a belső kirugózik, ennek megfelelően határozható meg az önszabályozás célfüggvénye.
A kerék ki-berugózásával szabályozott kerékdőlés változás jól megvalósítható a háromszög trapéz keresztlengőkaros felfüggesztésű futóműveknél, viszont egyáltalán nem a merev hidas futóműveknél. A McPherson futóműveknél csak a nyomtáv változásával érhető el kedvező kerékdőlés változás.
A kormányzott kerekeknél a kerékdőlés változik az elkormányzási szögek (α, β) függvényében. (4.33. ábra) A kerékdőlés nagyságát a csaphátradőlési szög (ε) határozza meg. Ε= 10-12° esetén a dőlési szög elérheti a 4-6° értéket is. Jól megfigyelhető ez a jelenség az 1980-as évek Mercedes és BMW típusainál.
4.2.5. Összetartás változás
Az összetartás menetközbeni szabályozása is a jármű stabilitásának megtartását, növelését szolgálja elsősorban a jármű sajátkormányzási viselkedésének ellenőrzése, befolyásolása révén. Nevezetesen a jármű túlkormányzottá válását kell megakadályozni. Ennek megfelelően a kanyarodás közben a hátsó futóműnél a külső kereket befelé, az összetartás irányába kell kormányozni. Az első futóműnél a túlkormányzás elkerülése érdekében éppen fordított a korrekció iránya. Az önkormányzott intelligens futóműveknél ez a szabályozás a kerekek ki – berugózásával valósítható meg.
4.2.6. Nyomtávváltozás
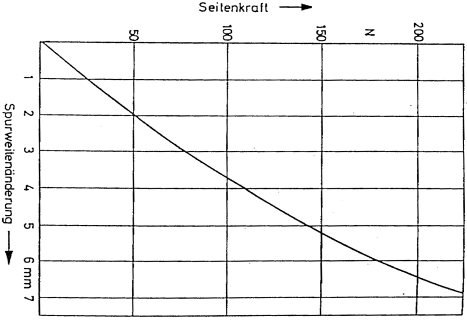
A nyomtáv az egy futómű két kerékének talppontjai közti távolság. A nyomtáv változását ebből következően a talppontok keresztirányú elmozdulása idézi elő. A nyomtáv változását egyenes irányú haladás esetén vizsgálják, miközben a felépítmény változó bólintó mozgást végez, amit a váltakozó lassítás – gyorsítás idéz elő. A nyomtávváltozás általában káros jelenség, miután a keresztben elmozduló kerekek megcsúszhatnak, melynek következtében csökken a kerék tapadása, a jármű elvesztheti a stabilitását. A merev hidas futóműveknél nincs nyomtávváltozás, míg független felfüggesztési futóműveknél a kerék ki-berugózása, a kerékdőlés, az összetartás változása a nyomtáv jelentős változását idézheti elő.
A már említett vizsgálati eljárás során a kerekek talppontjai szinuszos pályát írhatnak le. (4.37. ábra) A kerék haladási irányát minden pontban a pálya érintője adja meg, amely α szöget zár be a kerék síkjával. Ez azt jelenti, hogy a csúszásmentes gördülés érdekében a kerék síkjának ebben a változó irányába kellene fordulnia, ha viszont ezt a felfüggesztés rendszere nem teszi lehetővé, akkor a kerék ilyen szögbe ferde futást végez. Ez az úgynevezett kikényszerített ferde futás. Ha a kerék teljesen merev, akkor a ferde futás a kerék megcsúszásával jár. Ha a kerék oldalirányban rugalmas, akkor képes ezt a kikényszerített ferdefutást oldalcsúszás nélkül teljesíteni. Ennek az a feltétele, hogy az adott keréknek az adott jellemzők mellett meghatározható saját ferdefutási szöge (vagyis az a szög, amelynél a kerék oldalcsúszás nélkül képes a saját síkjával ferdén futni), melyet δ - val jellemezhetünk, nagyobb legyen a nyomtávváltozásra kikényszerített ferdefutási szögnél. Ilyen esetben a futóművet nyomtávváltozása korrigáltnak nevezzük. Ha viszont a kikényszeríttet ferdefutási szög nagyobb a kerék saját ferdefutási szögénél a kerék oldalra megcsúszhat. Számos vizsgálat azt mutatja, hogy személygépkocsiknál, ha a nyomtávváltozás a kerék ± 40 mm-s ki – berugózási tartományában kisebb 25 mm-nél, akkor a gumiabroncs rugalmassága következtében nincs oldalcsúszás.