8. fejezet - Különböző kormányzási rendszerek geometriai, dinamikai elemzése
8.1. A közúti járművek kormányzási rendszereinek altípusai, általános geometriai jellemzők
A közúti járművek kormányzásának különböző rendszereit három altípusba lehet sorolni:
-
Tengelykormányzás
-
Alvázkormányzás
-
Tengelycsonkkormányzás
Az alaptípusokon belül további jellegzetes konstrukciók találhatók, amelyek a jármű tengelyeinek számából következőn különböznek egymástól:
-
Kéttengelyes pótkocsik kormányzása
-
Háromtengelyes félpótkocsik kormányzása
-
Kéttengelyes gépjárművek kormányzása
-
Háromtengelyes gépjárművek kormányzása
-
Négytengelyes gépjárművek kormányzása
-
Csuklós autóbuszok kormányzása
A különböző kormányrendszerek geometriai, kinematikai elemzéséhez különböző általános jellemzők, paraméterek szolgálnak. Ezek közül a gyakoribbak:
-
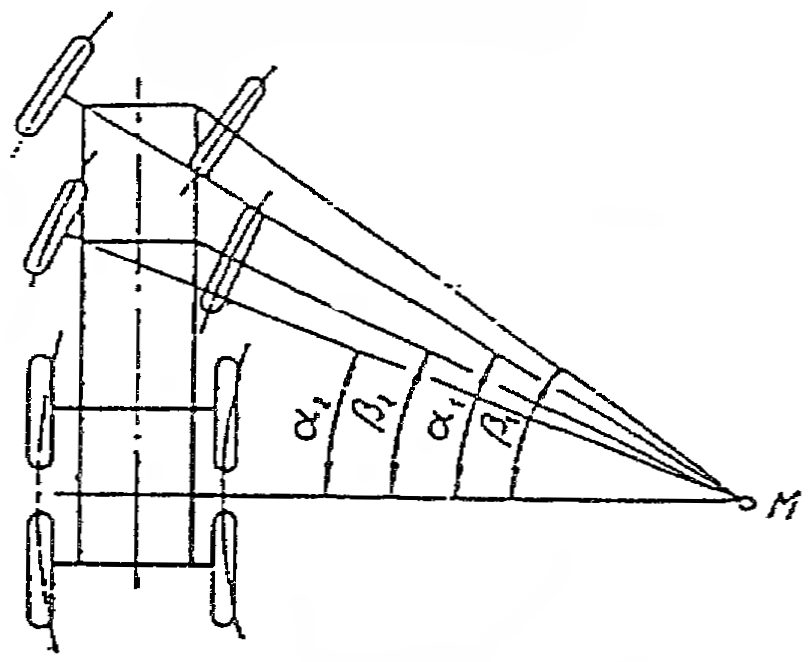
Kerekek elkormányzási szögei: ezek még egy futóművön is különbözőek lehetnek. A kanyarodó jármű kerekei különböző kanyarodási sugáron gördülnek. A kerekek oldalcsúszás nélküli gördülésére vonatkozó követelmény akkor teljesül, ha a kerék síkja a gördülési körhöz húzott érintő irányába, vagyis a kerék kerületi sebesség vektorának irányába esik. Az érintő és a jármű hossztengelye által bezárt szög a kerék elkormányzási szöge. A kanyarodó jármű belső oldalán gördülő kerekek elkormányzási szögei β (β1, β2, … βi) a külső oldali kerekek elkormányzási szögeit α (α1, α2, … αi) betűkkel jelöljük:
-
Az adott futóműre vonatkozó elkormányzási szög jele Θ (Θ1, Θ2, … Θi), amely a futómű geometriai közepe által leírt kör érintője és a jármű hossztengelye által bezárt szög.
-
A kormánykerék elfordítási szöge βL, ami a jármű egyenes irányából az adott sugarú körön haladásig történő elkormányzás szögtartományát jelenti.
-
A kormányrendszer kinematikai áttétele:

-
Kanyarodási sugár, R: a jármű hossztengelyének távolsága a kanyarodás középpontjától
-
Legkisebb kanyarodási sugár, ρ: a kanyar közepétől a legmesszebben gördülő kerék távolsága.
-
Külső fordulási sugár, Rk: a jármű legkülső pontjának távolsága a kanyarodási középponttól.
-
Belső fordulási sugár, Rb: a jármű legbelső pontjának távolsága a kanyarodási középponttól.
-
Nyomtáv, B: az egy futóműhöz tartozó két kerék felfekvő felületeinek súlypontja (talppontja) közötti távolság.
-
Tengelytáv, L: két futómű geometriai tengelye közötti távolság.
8.2. Különböző kormányzási rendszerek elemzése
8.2.1. Tengelykormányzás
Ezt a kormányzási rendszert az úgynevezett vonóháromszöges pótkocsiknál ma is használják.
A kerekek forgástengelye a vonóháromszöggel elforgatott futómű tengely révén mindig átmegy a kanyarodás középpontján, így nincs szükség külön kormánymechanizmusra. A kerekek kis sebességnél oldalcsúszás nélkül gördülnek. Nagyobb sebességnél a fellépő centrifugális erő hatására ennél a kormányzási rendszernél is elkezdődik a kerekek rugalmas ferdefutása, majd oldalcsúszása.
Elhanyagolható oldalerők esetén viszonylag egyszerű ennek a kormányzási rendszernek a geometriai összefüggései:
Az elkormányzási szögek egyformák:
|
|
(8.1) |

Így a jármű kanyarodási sugara:
|
|
(8.2) |

A kormányzás szerkezeti felépítése igen egyszerű. Könnyű, kis sebességre tervezett pótkocsiknál elegendő egy függőleges csap, az úgynevezett királycsap kialakítása és az y tengely körül elforduló vonóháromszög beépítése. Korszerű, nagyobb pótkocsiknál a tengely elkormányzását és a vonóerő egyenletes szétosztását golyós koszorú garantálja.
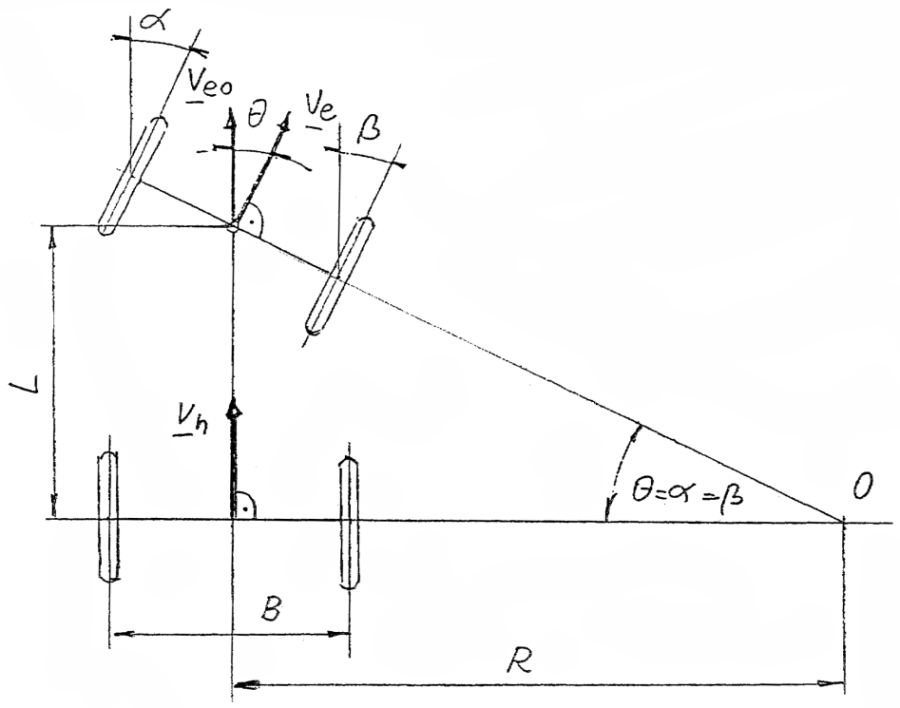
8.2.2. Alvázkormányzás
Ez a kormányzási rendszer elsősorban a mobil munkagépek, vontatók kormányzását jellemzi. A jármű alváza két részre tagolódik, a két felet egy- vagy kétszabadságfokú csukló kapcsolja össze. Egyszabadságfokú csaukló akkor elegendő, ha az egyes alvázrészekhez tartozó futóművek felfüggesztése és rugózása lehetővé teszi az x tengely körüli elfordulást és a z tengely irányú mozgást. Ilyen konstrukciót alkalmaznak a vontató járműveken, ha a nagyobb sebesség és a jobb minőségű útfelület ezt megkívánja illetve megengedi.
Terepjáró vontatók, mobil munkagépek futóműveit mereven erősítik az alvázhoz, ezért a két alvázrésznek egymáshoz viszonyítva az x tengely körüli elfordulását lehetővé kell tenni. Ezt szolgálja az alvázrészek közötti kétszabadságfokú csukló. A z tengely körüli elfordítás jelenti az ilyen járműveknél a kényszerkormányzást. Kisebb ízelt alvázú járműveknél, mint például kerti kistraktoroknál, könnyű félpótkocsis vontatóknál az elkormányzáshoz elegendő egyszerű mechanikus szerkezet. Nagyobb tömegű járműveknél már hidraulikus szervórendszerek beépítése szükséges.
Az alvázkormányzású járműveknél a kormányzás geometriája viszonylag egyszerű: az alváz becsuklási szöge egyben az elkormányzási szögek (Θ) felel meg. A kerekek elkormányzási szöge egyenlő és megegyezik az elkormányzási szögel:
|
|

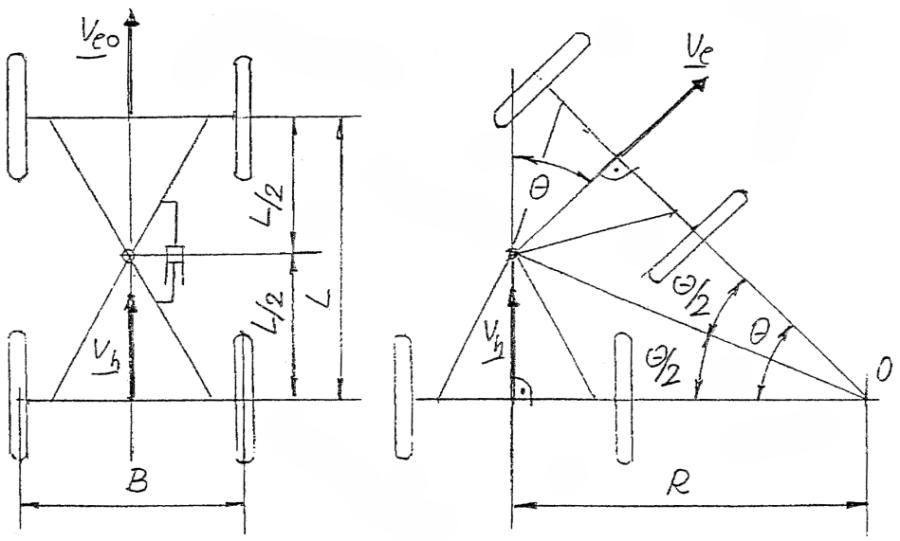
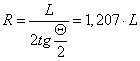
A központi alvázcsukló a tengelytáv felében helyezkedik el, így felírható:
|
|
(8.3) |

Ebből a kanyarodás sugara:
|
|
(8.4) |

Hasonlítsuk össze a három kanyarodási rendszert a jármű fordulékonysága szempontjából. Tengelykormányzás és tengelycsonkkormányzás esetén a kanyarodási sugár összefüggése egyaránt:
|
|

45°-os elkormányzást választva:
|
|
||
|
|

Az eltérés ilyen elkormányzáskor már 20%-os is lehet. Természetesen kis szögeknél a különbség elhanyagolható. Tehát nem a jármű fordulékonyságában mutatkozik meg az alvázkormányzás előnye, hanem a szerkezet egyszerűségében és a kerekek garantált oldalcsúszás nélküli gördülésében. Ugyanakkor jelentős hátránya ennek a kormányzási rendszernek a túl nagy farseprése és az álló helyzetben való elkormányzáskor a kerekek nagymértékű x és y tengely irányú elmozdulása. A hidraulikus szervókormányzású ízelt járművek kormánykerekek mellett gyakran látni a figyelmeztető táblát: „álló helyzetben kormányozni tilos!” Mindezekből következik a nemzetközi előírás, közúti gépjárműveken az alvázkormányzási rendszer nem alkalmazható.
8.2.3. Tengelycsonk kormányzás
A tengelycsonk kormányzás a közúti gépjárművek általánosan alkalmazott járműrendszere, melyet a korábbi szakirodalom feltalálója után Ackermann kormányzás néven is említ.
A tengelycsonk kormányzás szerkezetében a futómű három tengelyrészre tagolódik:
tengelytest és a két komplett kerék. A tengelytest a jármű felépítményéhez csatlakozik és a z tengely körüli elfordulását megfelelő kényszerek akadályozzák. A tengelytesthez a komplett kerék csonkállványán kialakított csuklós szerkezettel kapcsolódik a két kerék. A kerekek a tengelycsonk csuklók által meghatározott elkormányzási tengely körül fordíthatók el a kormánymechanizmus által. Az elkormányzás tengelyét különböző paraméterekkel lehet jellemezni. Ezzel részletesen a csapgeometria témakörének tárgyalásakor a 4. fejezet fejezetben foglalkoztunk.
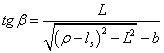
A tengelykormányzás geometriai vizsgálatakor a jármű kinematikai sémáját a talaj síkjában ábrázoljuk. A járműmozgás sebességvektorait a kerekek talppontjába (N) illetve a tengelytest geometriai középpontjába helyezzük, a kerekek elkormányzásának középpontját az elkormányzási tengelynek a talaj síkjával képzett döféspontjába (D) pozícionáljuk. A 8.3. ábra ezt a kinematikai sémát mutatja.
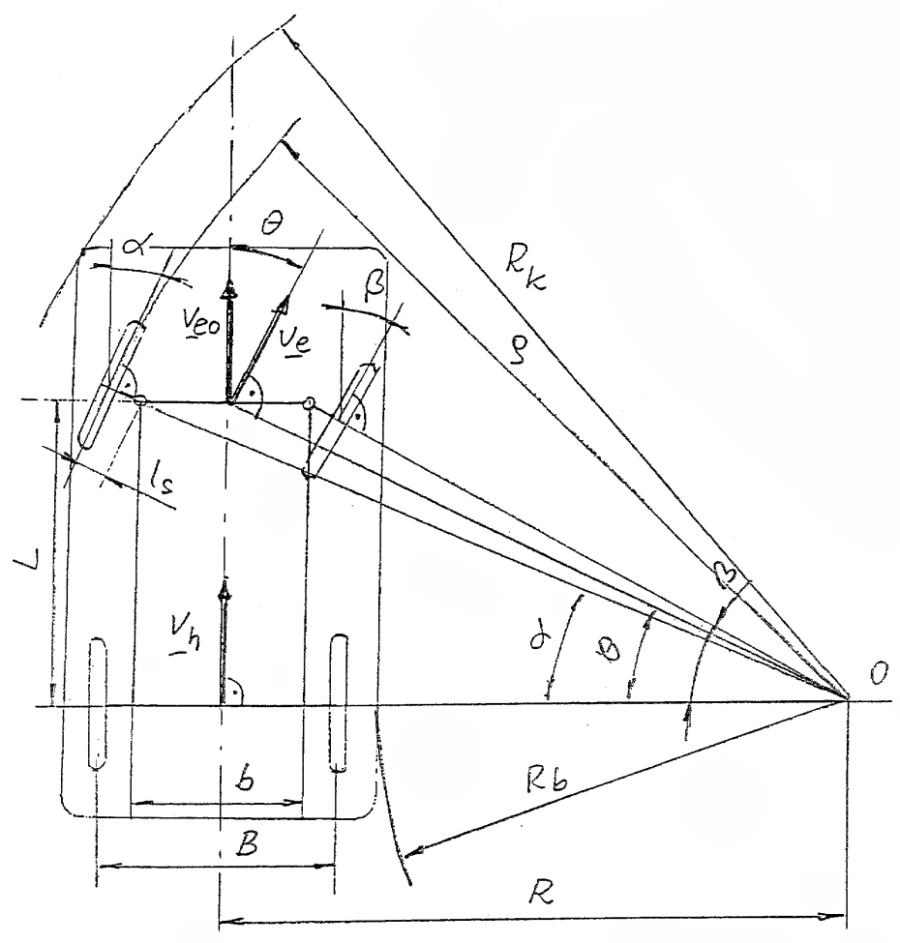
A kinematikai séma alapján levezethetőek a kormányzás jellemző paraméterei. A külső kerékre vonatkozóan:
|
|
(8.5) |

Ahol:
|
b |
– az elkormányzási tengelyek döféspontjainak távolsága, melyet a trapézmechanizmus bázistávolságának is neveznek. |
A belső kerékre vonatkozóan:
|
|
(8.6) |

A tengelytest geometriai középpontjára vonatkozóan:
|
|

A Θ elkormányzási szögből meghatározható a jármű kanyarodási sugara:
|
|

A kormánymechanizmus névleges kinematikai áttételének (ik) ismeretében a kormánykerék elfordítási szögéből (βL) közvetlenül meghatározható a kanyarodási sugár:
|
|
(8.7) |

A járművek kanyarodási tulajdonságára, fordulékonyságára jellemző adat a legkisebb kanyarodási sugár, amelyik ebben a kormányzási rendszerben az első külső kerék gördülési körének sugara a kormánymechanizmus végállásig történő elkormányzása esetén. A kinematikai vázlatból következően:
|
|
(8.8) |
Ahol:
|
ls |
– az N és D pontok távolságának y koordinátája, aminek az elnevezése kormánylegördülési sugár, vagy elkormányzási sugár. |
A kormányrendszer geometriájának tervezésekor a jármű fordulékonyságának mértéke, a RO sugár a kiinduló adat. Ebből lehet meghatározni a kerekek maximális elkormányzási szögeit.
|
|
(8.9) |
|
|
(8.10) |

A jármű kanyarodása közben a belső és külső kerekeket eltérő szögben kell elkormányozni. Ennek a geometriai követelménynek könnyen eleget lehetne tenni egy olyan kormánymechanizmussal, amelyikkel az egyes kerekeket számítógépes szabályzású aktuátorok fordítják el az ideális szögekbe. A jármű vezetője csak szándékát fejezné ki a kanyarodás pályájára, normagörbéjére vonatkozóan. Ez lenne a Steerbywire kormányzási rendszer, amelynek alkalmazását jelenleg a nemzetközi előírások nem engedélyezik. Ezzel szemben a kormánykerék és a kormányzott kerekek között állandó mechanikus kapcsolatnak kell lenni. Tovább bonyolítja a kormánymechanizmus szerkezeti felépítését a kerekek rugózásából és az alkatrészek deformációjából adódó geometria változások kompenzálása. Ezekkel a kérdésekkel részletesebben a 9. fejezet fejezetben és a 10. fejezet fejezetben foglalkozunk.
8.2.4. Többtengelyes járművek kormányzása
A többtengelyes járművek kormányzása geometriáját és szerkezeti megoldását tekintve is több problémát vet fel. A kerekek kanyarodás közbeni oldalcsúszás-mentes gördülése csak összkerék kormányzással valósítható meg, kettőnél több tengelyes járművek esetén. Ilyen járművek döntő többségben a haszonjárművek, autóbuszok, teherautók, félpótkocsik kategóriájában fordulnak elő. Nehéz teherautóknál gyakori a háromtengelyes konstrukció. Ezeknél az első tengely kormányzott, a hátsó két tengely hajtott, nem kormányzott. (8.4. ábra)
A kanyarodás középpontja a két hátsó tengely terhelési súlypontján átmenő egyenesre esik. Ennek következtében a hátsó kerekek forgástengelyei már nem futnak át a kanyarodás középpontján. A hátsó kerekek radíroznak, oldalra elcsúsznak. Ezen a harmadik tengely számítógépes szabályzású kormányzásával lehet javítani. Korszerű, nagyméretű autóbuszoknál ilyen megoldás már megjelent. Ilyen kormányzási rendszerrel működik a Mercedes Tourismo háromtengelyes autóbusz.
Ennél az autóbusznál a hajtott B tengely vonalába esik a kanyarodás középpontja, ezek a kerekek oldalcsúszás nélkül gördülnek. Az első kerekek elkormányzása meghatározza a kanyarodás sugarát és a kanyarodási középpont helyzetét. A harmadik, C tengely kerekeit ennek megfelelően kell elkormányozni. Ezt egy hidraulikus szabályzó rendszer végzi. Az első kerekek elkormányzását a kormánygép által működtetett hidraulikus munkahenger érzékeli; a hátsó hidraulikus munkahenger ezt leképezi és a kormánytrapéz mechanizmus elfordításával beállítja a két hátsókerék optimális elkormányzási szögét.
Négytengelyes járműveknél a két első tengely kormányzott, a kanyarodás középpontja a két hátsótengely terhelési súlypontján átmenő egyenesre esik, ennek következtében a hátsó kerekek már nem saját síkjukban gördülnek, radíroznak, esetleg oldalra is csúsznak. Ilyen járművek Európában az ömlesztett áruk szállításának kedvelt, gyakran alkalmazott billenőplatós teherautói.
Háromtengelyes tengelykormányzott, vonóháromszöges pótkocsik kormányzásának geometriája hasonló a háromtengelyes, első tengelyen kormányzott teherautókéhoz. Az első kerkek tisztán gördülnek, a hátsó kerekek ferdén futnak. Kis kanyarodási sugárnál már erősen radíroznak, túlzottan igénybe veszik az útburkolatot.
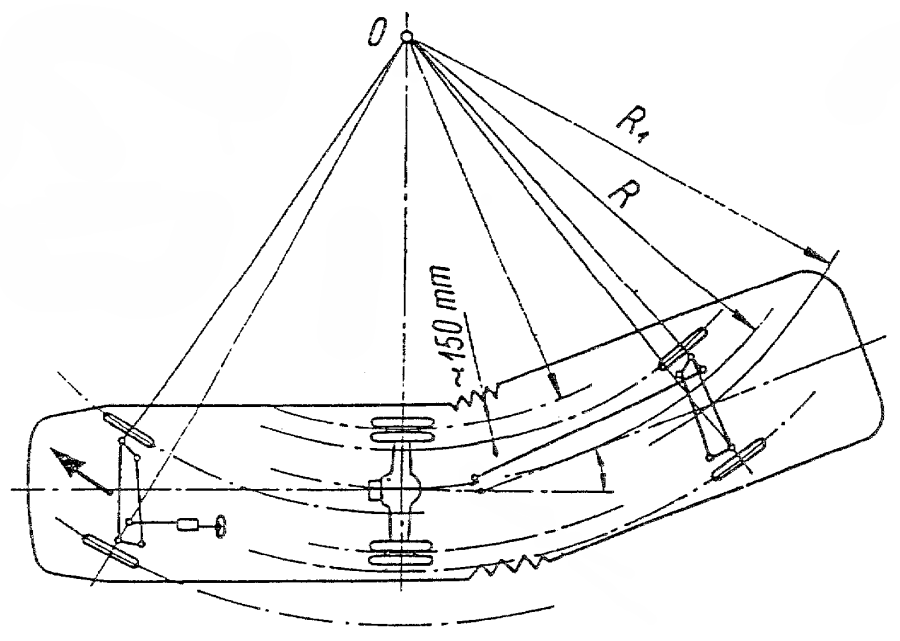
Háromtengelyes nyerges pótkocsiknál a középső tengely vonala minden szabályzó mechanizmus nélkül átmegy a kanyarodás középpontján, így ezek a kerekek oldalcsúszás nélkül gördülnek. Az első és harmadik tengely kerekei viszont már nem tudnak csúszásmentesen forogni. Kis kanyarodási sugárnál már itt fellép a kerekek radírozása, oldalcsúszása is. Ennek csökkentése érdekében gyakran alkalmazott a harmadik tengely úgynevezett talajkormányzása. Ennél a konstrukciónál a harmadik futóművet tengelycsonk kormányzásúvá alakították át és a jelentős utánfutás következtében a két kerék automatikusan beállt a saját kanyarodási körére. Ennek a tengelynek a maximális terhelése 6 tonna lehet. Alapvető hátránya, hogy tolatáskor a kerekek kifordulnának, ezért megfelelő szerkezettel ilyenkor középhelyzetben rögzíteni kell a kormánymechanizmust. Emiatt ma már alig használjuk ezt a kormányzási rendszert. (8.7. ábra, 8.8. ábra)
Csuklós autóbuszok kormányzási rendszerét alapvetően a hajtásrendszer struktúrája határozza meg. Farmotoros csuklós autóbuszoknál a harmadik (C) tengely hajtott és nem kormányzott. Autóbuszok nagyobb teherbírású teherautók hajtott futóművei – a katonai futóműveket leszámítva – szinte kizárólag merevhidasak, lap- vagy légrugósak. A padló alatti motoros csuklós autóbuszok középső (B) tengelye hajtott és nem kormányzott.
A hátsókerék hajtású, tolócsuklós autóbuszok kormányzása könnyen és precízen teljesíti a geometriai paramétereket. A csuklós busz első kocsiteste hagyományos kéttengelyes járművel azonos kormányzási tulajdonságokkal rendelkezik. (8.9. ábra)
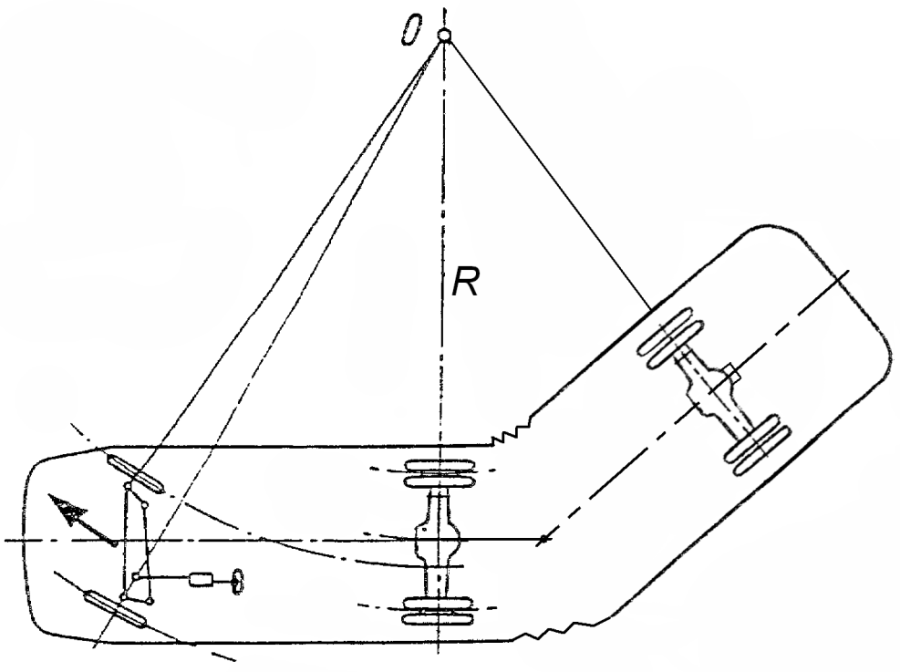
A kormánykerék elfordítási szöge meghatározza a kanyarodás sugarát és középpontját, a hátsó kocsitest kerekei tisztán gördülve, a gumiabroncsok tapadásából adódó oldalerő kényszerítő hatására olyan körpályát követnek, amelyiknél a kerék talppontjában húzott érintőre merőleges sugár átmegy az első kocsitest kanyarodási középpontján. Ettől eltérés, vagyis a hátsó kerekek oldalcsúszása akkor következik be, amikor a vezető álló helyzetben kormányoz, vagy amikor a hátsó hajtás miatt csúszós úton a hátsó kocsitest oldalra kicsúszik, becsuklik, „bebicsaklik”. Ezeknél a buszoknál a csuklószerkezet becsuklásgátló szerkezettel együtt készül, amelynek elsődleges referenciajelei a kormánykerék elfordítási szöge és a becsuklási szög. A becsuklásgátló nem kormányszerkezet, a kormányzást aktívan nem szabályozza, hanem a hátsó kocsitestnek a szabályos mozgásállapottól való eltérését akadályozza passzívan.
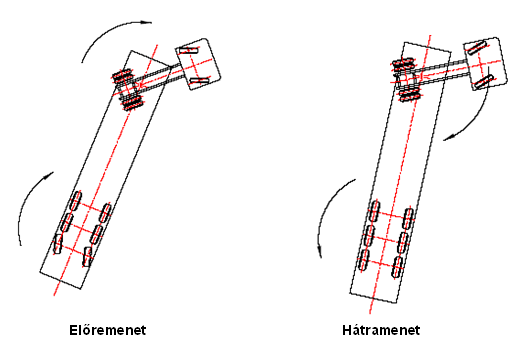
A hátsókerék-kormányzású csuklós autóbuszoknál az első kocsitest kormányzása klasszikus kialakítású, viszont a hátsó futómű kényszer-kormányzású. (8.10. ábra)
A két kereket kormánytrapéz mechanizmus köti össze, az elkormányzást a két kocsitest összekapcsoló főcsuklótól oldalra eltolt irányzó csuklóhoz kapcsolódó tolórúd végzi. A hátsó kerekek gördülési pályáját a két csukló távolságával lehet meghatározni. A hátsókerék-kormányzású autóbuszok nagy előnye a kisebb kanyarodási folyosó szélesség, ami belvárosi közlekedésben különösen előnyös. Viszont konstrukciós hátrányuk, hogy a padló alatti motorbeépítés miatt alacsonypadlós kivitelben nem gyárthatóak.