11. fejezet - Intelligens kormányrendszerek és szerkezeti elemeinek analízise
11.1. Az intelligens kormányrendszerek általános funkciói
Az intelligens kormányrendszerek a gépjárművek többi rendszeréhez viszonyítva a legteljesebb spektrumban rendelkeznek a szabályozástechnika különféle elemeivel. Szenzorai figyelik a járművezető mozdulatait, erőkifejtését. Elemzik a jármű mozgásállapotát, pozícióit, állandóan vizsgálják a jármű közvetlen környezetét. A legkorszerűbb rendszerek képesek a közlekedésirányítás központjaitól kapott információkat is feldolgozni és a szabályozási programba beépíteni azokat. A nagy műveleti gyorsaságú fedélzeti informatikai egységeknek és a dinamikus mechanikai aktuátorainak köszönhetően képes a járművet valósidőben is irányítani. Az intelligens kormányrendszerek a szerkezeti és szoftver kiépítettségüktől függően különbözőképpen alkalmasak több beavatkozási funkció ellátására:
-
Javítják a járművezető tevékenységének kényelmét, csökkentik a kormányzáshoz szükséges emberi erőt. Ez a kisegítő, rásegítő funkció, közismert elnevezéssel szervó hatás.
-
Támogatják a vezetőt a helyes kormánymozdulat megválasztásában: a kormánykerék megindításával jelzi a helyes elkormányzás irányát, kanyarodás közben pedig az irányváltozatás szükségességét. Ez a funkció különös jelentőséget kap a parkolási vagy előzési manőverek során.
-
Átveszik a jármű irányítását a járművezető elmaradt, meg nem kezdett mozdulata esetén. Ez a funkció dominál a jármű menetstabilitásának megőrzésekor, vagy helyreállításakor. Ez a kormányalapú ESP (Elektronische Stabilitäts Program).
-
A kormánymechanizmus áttételének változtatásával befolyásolni tudják a kormánymanőverek sebességét. Nagyobb menetsebesség esetén (pl. autópályán haladva) csökkenti az adott kormánykerék elkormányzási szöghöz tartozó kerékelkormányzási szöget, vagyis növeli a kormánymechanizmus kinematikai áttételét. Városi forgalomban viszont növeli a kerékelkormányzási szöget, tehát csökkenti a kinematikai áttételt:

Ahol:
iK
– a kormánymechanizmus kinematikai áttétele,
βL
– a kormánykerék elfordítási szöge
Θ
– a kormányzott futómű tengelyének geometriai középpontjára vonatkoztatott kerékelkormányzási szög.
Autópályán közlekedve (strada):

(11.1)
Ahol:
γ
– a szabályozási szög.
Tehát:

Városi közlekedésben (city):

(11.2)
Vagyis:

-
A legkorszerűbb intelligens kormányrendszerek már a vezető döntéseit is felül tudják bírálni. A vezető rossznak minősített mozdulatával szemben képesek ellentétes irányú kormányzásra is. Ebben a funkcióban már a műszaki és jogi kérdések együtt jelentkeznek. A vezető jogi felelősségét az intelligens rendszer átveszi, de súlyos jogi probléma akkor jelentkezik, amikor a rendszer téved, és saját maga hoz rossz döntést. Az ilyen rendszerek nemzetközi minősítése, engedélyezése igen komoly szakértelmet, tudományos elemzést, gondosan megtervezett teszteléseket feltételez. Számszerűsített megbízhatóságukat ppm értékben határozzák meg, vagyis egymillió példányból hány darab hibásodhat meg. Ez az érték jelenleg már 4-5 ppm.
11.2. Az intelligens kormányrendszerek jellemző típusai
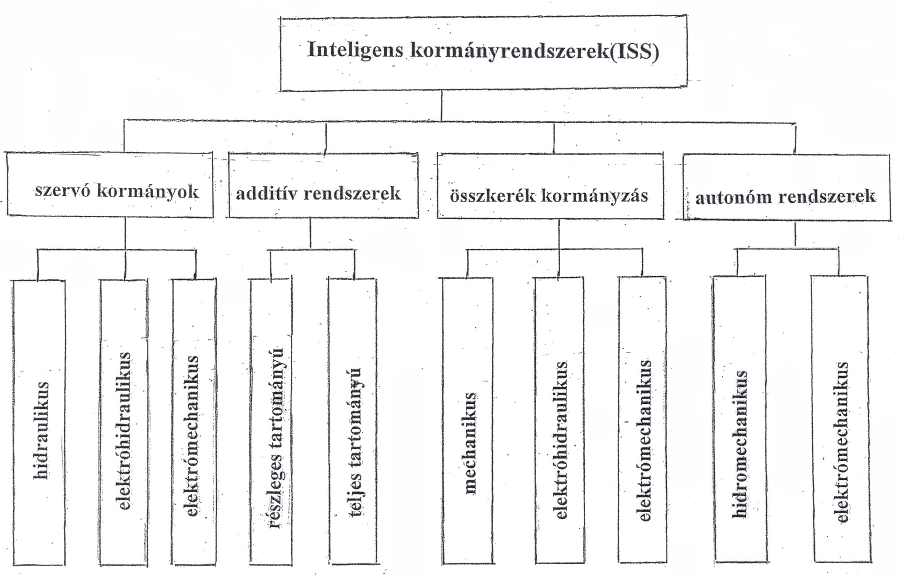
Az intelligens kormányrendszereknek napjainkban 4 alaptípusát lehet megkülönböztetni: (11.1. ábra)
-
Szervókormányok,
-
Additív rendszerek,
-
Összkerék kormányzású rendszerek,
-
Autonom kormányrendszerek.
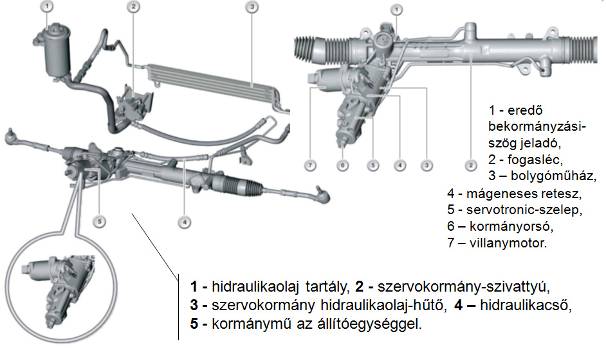
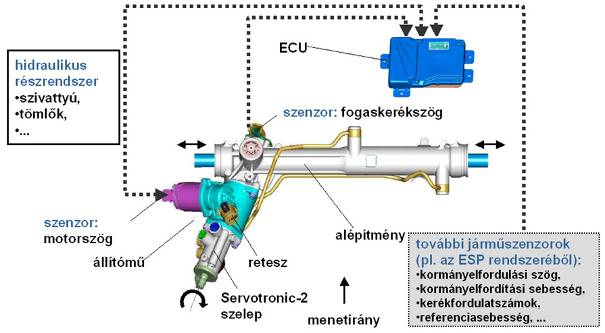
Az első intelligens kormányrendszerek a szervókormányok mint vezetőt támogató, kisegítő szabályozott egységek voltak. Szervókormányzás során a megfelelő szenzorok figyelik a vezető szándékát az elkormányzás irányára és nagyságára vonatkozóan, továbbá a vezető erőkifejtését, vagyis érzékelik a kormánykerék pozícióját és a továbbított nyomaték nagyságát. A szabályozásnak a pozíció ugyan referencia jele, de arra nem hat vissza, azt nem változtatja meg. Viszont rásegítő nyomatékot fejt ki a vezető erőkifejtésének csökkentésére. Tehát nyomatékszabályozás történik. Ebben a szabályozási rendszerben a kormánykerék és a kormányzott kerék közötti mechanikus kapcsolat nem szakad meg, még a vezető hibás döntése esetén sem, sőt a hibás döntést is nyomatékrásegítéssel támogatja a rendszer. Ezért ezt a típusú szabályozást passzív szervókormányzásnak nevezzük. De ma már működnek félaktív szervókormány rendszerek is, amelyek az elkormányzási pozíciót továbbra sem változtatják meg, viszont a nyomaték rásegítés nagyságának változtatásával figyelmeztetik a vezetőt döntése korrigálására. A rásegítő nyomaték akár nulla is lehet. A hidraulikus vagy az elektrohidraulikus rendszer ma már klasszikus konstrukció, egyedüli alkalmazásuk esetén a kormányrendszert már nem illeti meg az intelligens minősítés. Viszont ezeknek a szervó rendszereknek a korszerű szerkezetei megtalálhatóak az adaptív vagy kísérleti autonóm rendszerekben, miután azoknál is igényként merül fel a rásegítő erő, nyomaték szolgáltatására. (11.2. ábra)
11.2.1. Összkerék kormányzású rendszerek
Időrendben az intelligens kormányzás második technikai csoportját az összkerék kormányzású rendszerek alkották.
Az 1980-as években szinte technikai divattá vált az összkerék kormányzások innovációja. De a multilink, elasztókinematikus futóművek megjelenése és dinamikus elterjedése az összkerék kormányzást háttérbe szorította.
Ezek az új futóművek integrált önkormányzási funkciójukkal ugyanazokat a járműdinamikai előnyöket nyújtották, mint a jóval bonyolultabb, drágább számítógépes összekerék kormányzású konstrukciók.
Az elektromechanikus hullámhajtóművek (aktuátorok) megjelenése ismét az összkerék kormányzás felé fordította fejlesztő mérnökök figyelmét. Ezek az új aktuátorok jól szabályozhatóak, kisebb tömegűek és olcsóbbak, mint a korábbi hidraulikus, vagy elektromechanikus szerkezetek. Felhasználásukkal egy viszonylag olcsóbb, egyszerűbb hátsó futóművel is lehet a jármű kanyarstabilitását lényegesen javítani.
Az összkerék kormányzás a jármű kanyarodási tulajdonságát variálhatóvá teszi. A hátsó kerék kormányzása történhet az első kerekek elkormányzásával ellentétesen, vagy azonosan.
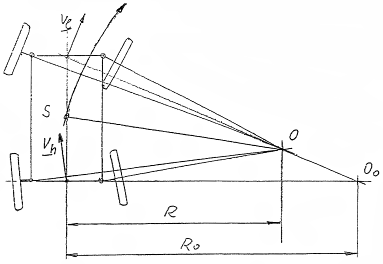
A hátsó kerekek ellentétes kormányzásakor a kormánykerék elkormányzási szöge által meghatározott kanyarodási sugárnál kisebb effektív sugáron fordul a jármű. Úgy viselkedik, mintha túlkormányzott lenne. (11.3. ábra)
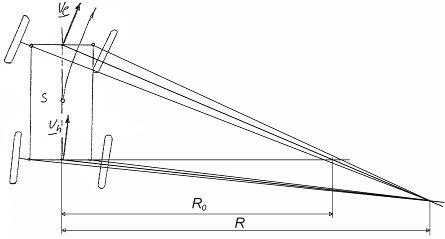
Ez a kormányzási mód előnyös kis sugarú manőverezéskor, parkoláskor viszonylag kis járműsebesség melle. A városi közlekedésben célszerű ilyen szabályzást alkalmazni. A hátsó kerekek és az első kerekek azonos irányú kormányzásakor a jármű nagyobb sugáron kanyarodik, úgy viselkedik, mintha alulkormányzott lenne. (11.4. ábra)
Az elsőgenerációs összkerék kormányzási rendszereket tisztán mechanikus elemek alkották. Az első futómű kormánygépétől kardántengely továbbította a nyomatékot a hátsó futómű speciális kormánygépéhez. (11.5. ábra)
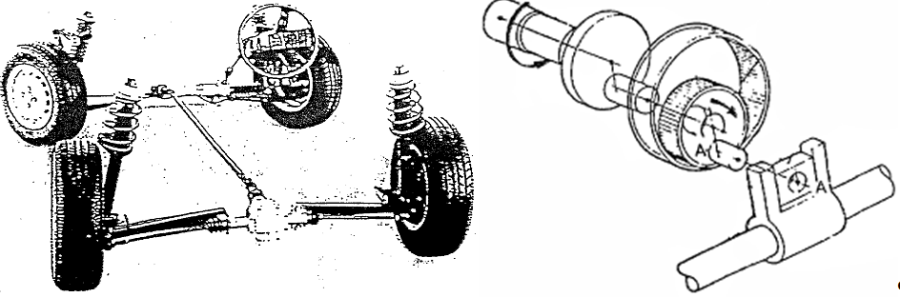
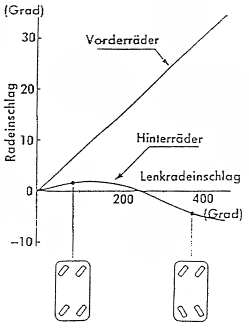
Az excentrikus tárcsa tengelycsapján szabadon elfordult egy bolygókerék, amely egy álló belső fogazatú koszorúkerékben legördült. A bolygókerék excenter csapja egy kulisszán keresztül tudja mozgatni a két kerék nyomtávrúdját. A kormánykerék 200°-os elfordításáig a hátsó kormánygép a kerekeket az első kerekekkel azonos irányba fordította el. Ez a kormányzási szakasz lényegében az országúti közlekedés során előforduló szögtartományt fedi le. 200°-os kormánykerék szög után az excenteres bolygóműves szerkezet a kulissza mozgásirányát megváltoztatta, az első és hátsó kerekek ellentétesen fordultak el. Ez megfelelt a városi üzemmódnak, különösen a parkolási kormányzás kinematikájának. Ebben a mechanikus összkerék kormányzási rendszerben a szabályozás egyetlen referenciajel alapján folyt, a kormánykerék elfordítási szöge alapján. Nem vette figyelembe a jármű sebességét, oldalgyorsulását. (11.6. ábra) Viszont megfelelt a kormányzási követelmények akkori szigorú előírásainak: a kormánykerék és a kormányzott kerekek között állandó mechanikus kapcsolat működött.
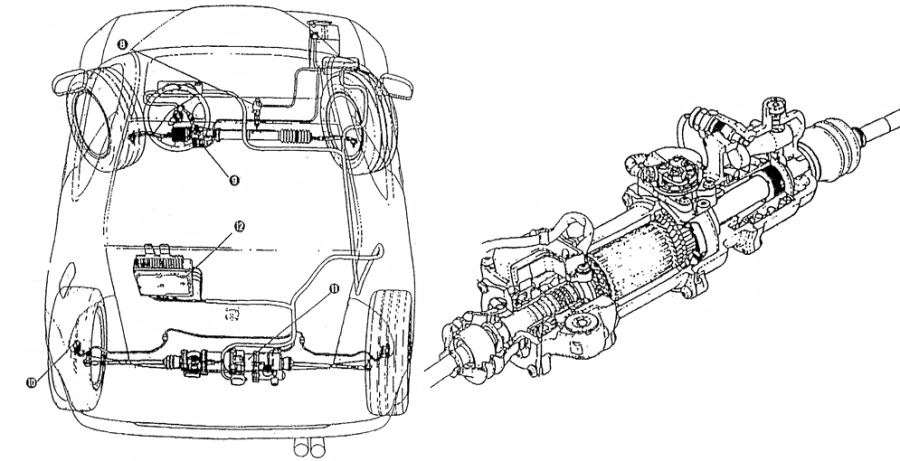
A második generációs összkerék kormányzási rendszerek elektrohidraulikus, vagy elektromechanikus, számítógépes szabályzásúak. (11.7. ábra) A hátsó kerekek elkormányzása steer by wire rendszerű, a szabályozás szoftver programja a járműmozgás dinamikus paramétereit is figyelembe veszi. De még az ilyen rendszerek sem lettek vetélytársai az elektrokinematikus, multilink önszabályozott hátsó futóműveknek. Az összkerék kormányzás újra előtérbe kerülését az elektromechanikus hullámhajtóműves rendszerek megjelenése hozta.
11.2.2. Additív kormányzás
Adaptív kormányszabályozáskor pozíció és nyomaték szabályozás együttesen történik. A nyomaték rásegítés lehet a vezető döntésével azonos irányú, de lehet ellentétes is. Például a vezető jobbra elrántja a kormányt, de abban az irányban nincs se parkoló, se útelágazás, esetleg a mellette lévő sávban folyamatosan haladnak a járművek. Tehát a vezető hibás döntést hozott. Az adaptív rendszer ilyenkor a kormánykerék visszafordítása nélkül a kormányzott kereket ellentétesen fordítja el, vagyis lényegében ilyenkor átveszi a jármű irányítását a vezetőtől. Ez pedig már műszaki és jogi probléma egyszerre.
Ez a kormányzási rendszer jelenleg a steer-by-wire kormányzás első foka. A nagykategóriás személygépjárművek több típusában már additív kormányzást találunk. Megbízhatóságukkal kiemelkednek a BMW és az Audi konstrukciók.
Az additív kormányzási rendszer műszakilag és jogilag is megfelel az érvényes nemzetközi előírásoknak.
11.2.3. Autonóm kormányzás
A kormányrendszerek további minőségi műszaki fejlődésének jelenleg már nem csak technikai, hanem jogi problémái, gyakran korlátai vannak. Műszakilag ma már lehet olyan bonyolult, intelligens és nagy megbízhatóságú autonóm rendszereket akár sorozatban is előállítani, amelyek önállóan képesek az egyes kerekeket a jármű menetstabilitásának megtartása érdekében a vezetőtől függetlenül, ha szükséges akár ellenében is kormányozni.
De ehhez már a kormánykerék és a kormányzott kerekek közötti mechanikus kapcsolatot ki kell iktatni, a vezető csak a jármű kanyarodási szándékát fejezi ki és a számítógépes szabályozási rendszer a jármű mozgását leíró számos információ alapján elektromechanikus vagy elektrohidraulikus hálózaton keresztül a kerekeket megfelelő elkormányzási pozícióba állítja. Ez a steer-by-wire rendszer, amely teljes kiépítésében egységbe foglalja a jármű többi rendszerének komplex irányítását. Már különböző megvalósulásokról, kísérleti járművekről jelennek meg szűkszámú információk. Ezeknél a jövőbemutató kutatásoknál, fejlesztéseknél a kormányzás, a felfüggesztés, a rugózás, a fékezés, a motorvezérlés integrálása, a jármű menetstabilitásának növelése mellett már jelentős súlyt kapnak az energiatakarékossági, környezetvédelmi igények, a biztonságkritikus tervezési eljárások.
11.3. Az intelligens kormányrendszerek új műszaki megoldásai
11.3.1. Elektromechanikus félaktív szervókormányok
Az elektromechanikus félaktív szervókormányoknál (EPS = Electropowerassistant System) a kormánykerék és a kormányzott kerekek közötti mechanikus kapcsolat közvetlen és állandó. A szabályozási energiát kefe nélküli, számítógépes kommutálású egyenáramú motor (BLDC) szolgáltatja, mely fordulatszám reduktoron és csigahajtáson keresztül a kormányrendszer valamely egységébe vezeti be a rásegítő nyomatékot. Az EPS rendszer kormánygépei szinte kizárólag fogaskerék-fogasléces szerkezetűek. A kisegítő nyomaték bevezetésének kialakítása szerint különféle típusokat fejlesztettek ki:
-
EPSc – a villanymotor a kormányoszlopon helyezkedik el, a csigahajtás a kormánykerék tengelyéhez kapcsolódik.
-
EPSp – a villanymotoros csigahajtóműves egység a fogasléces kormánygép fogaskerekéhez kapcsolódik.
-
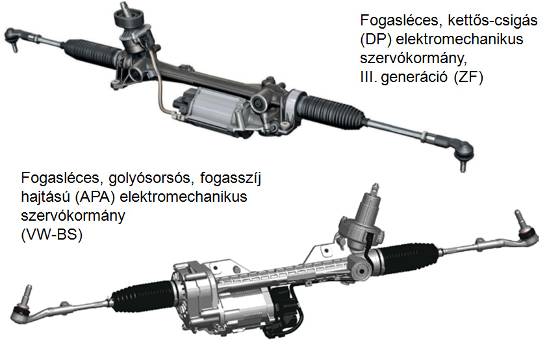
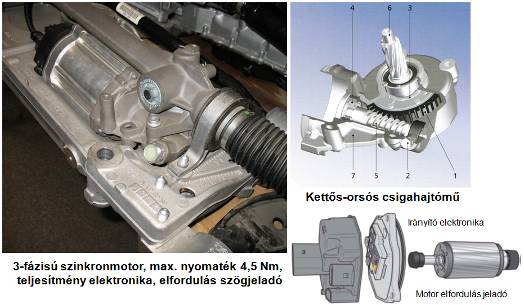
EPSdp – a kormánygép fogasléce a szervó nélküli alapméretnél hosszabb, hozzá kapcsolódik egy második behajtó fogaskerék, amelyet a fogasléccel párhuzamos tengelyű villanymotor csigahajtással forgat. Tehát ezeknél a kormánygép egy hosszú fogaslécet, két meghajtó kis fogaskereket és egy csigahajtást tartalmaz.
-
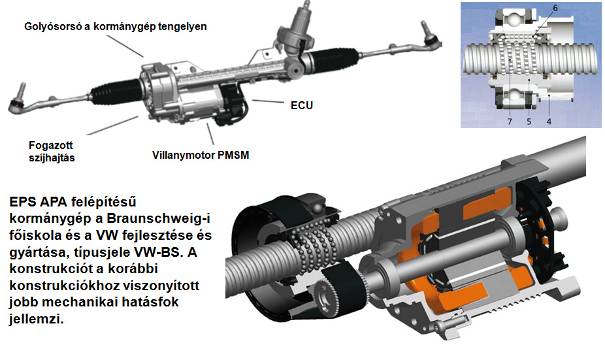
EPSapa – a kormánygép fogaslécét egy csavarorsó hosszabbítja meg, melyen egy golyósoros anya helyezkedik el. Az anya axiálisan csapágyazott, forgatásakor a csavarorsós fogasléc elmozdul, de a vezető által meghatározott irányba. Az anyát a kormánygép tengelyével párhuzamos villanymotor a fordulatszám reduktoron keresztül fogazot szíjjal hajtja.
-
EPSd – ennél a rendszernél is a fogasléc csavarorsóval hosszabbított, a golyósoros anyát a csavarorsóval egy tengelyben, koaxiálisan beépített villanymotor fordulatszám reduktoron keresztül forgatja.
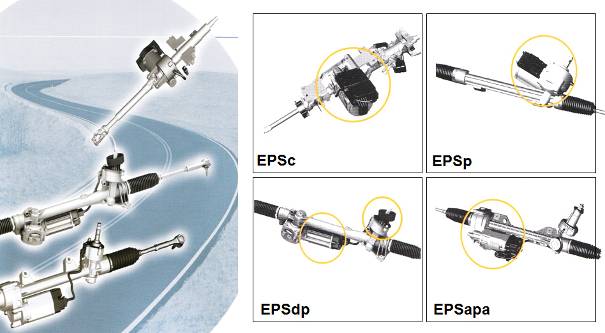
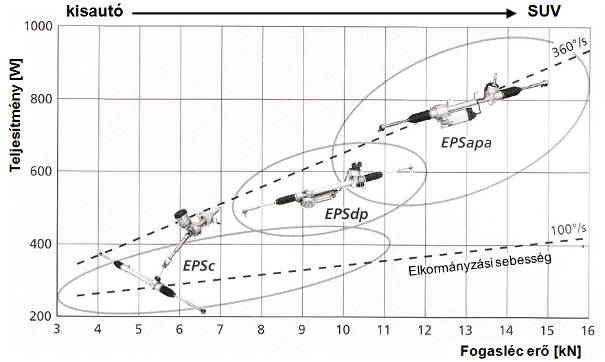
Az EPS szervókormányok szerkezeti kialakítása függ a szükséges fogasléc-erő igénytől. A kormányoszlopon elhelyezett villanymotor a kisautó kategóriában használható, míg a nagy fogaslécerőt adó és jó hatásfokú konstrukciók (EPSapa, EPSd) a nagy autókhoz, a terepjárókhoz, illetve SUV járművekhez készülnek. (11.8. ábra) A kormányzáshoz szükséges kormánygép bemenő teljesítményt meghatározza az elkormányzási sebesség igény, illetve követelmény is. Mint az ábrán látható, a 100 °/s és a 300 °/s között több, mint kétszeres a teljesítmény szükséglet.
Az elektromechanikus szervokormány (EPS) mai szolgáltatásai az ún. félaktív kormányzás követelményeit teljesítik. Az EPS ma sebességtől függően szabályozott elektromos rásegítésű kormányrendszert jelent, amely csak akkor lép működésbe, ha arra az elkormányzáshoz, illetve asszisztens szolgáltatáshoz szükség van. Hidraulikus részt egyáltalán nem tartalmaz. A hidraulikus szervokormánnyal szemben előnye, hogy a vele felszerelt autók kevesebb tüzelőanyagot fogyasztanak, emellett új kényelmi és biztonsági funkciókkal is szolgál: a kormánykerék egyenesmenetbe való aktív visszaállítása megkönnyíti a kormányzási középpont megtalálását, míg az oldalszél kompenzáció segítséget nyújt a vezetőnek, amikor állandó oldalszélben vagy folyamatosan egy irányban lejtő útfelületen halad nem kell a vezetőnek erőrátartással kormányoznia.
Elsőkerék-hajtású gépkocsiknál az EPS a különböző hosszúságú hajtótengelyek okozta oldalirányú elhúzás kompenzálására is alkalmasak. Erre különösen hirtelen gyorsításoknál kerülhet sor.
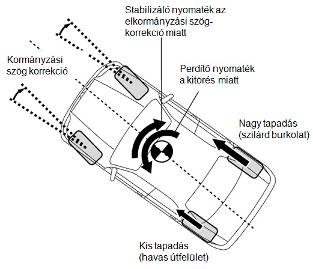
A gépjármű sodródása, kitörése ellenkormányzással csökkenthető. EPS rendszerrel felszerelt járműnél, ha a vezető az ellenkormányzást helyes irányba végzi, azt az EPS szervórendszer növelt nyomatékkal támogatja, tehát abba a kormányelfordítási irányba ad támogatást, mely segíti a jármű stabilitását. Ha a gépjármű vezetője helytelenül választja az ellenkormányzás irányát, akkor az EPS egyáltalán nem ad szervótámogatást.
A golyósoros csavarorsós EPS rendszerek (apa, d) hatásfoka maximális teljesítménynél 50% körüli, sokkal jobb, mint a hidraulikus, elektrohidraulikus szervókormányoké. A villanymotor áramfelvétele 12 V névleges feszültségnél 85 A. A kormánygép maximális kimenő teljesítménye 500 W.
Az EPSapa és EPSd kormánygépek az automatikus parkolás irányítására is képesek, akár vezető nélkül is. E művelet közben a kormánykerék az állandó mechanikus kapcsolat miatt elfordul, a szoftver ilyenkor kéri a vezetőtől a kormánykerék elengedését.
Az elektromechanikus szervókormányok szabályozási programja különböző kiegészítő funkciókkal, információ információ szolgáltatással is rendelkezik. A rásegítő vagy visszatérítő nyomaték különböző paraméterektől függően változtatható, mint például a jármű sebességétől, a kormánykerék elfordítási szögétől és szögsebességétől. A meghibásodott gépkocsi vontatásakor az akkumulátor kapacitásától függően ad szervótámogatást. Ha a 12V-os akkumulátor kapocsfeszültsége 9 V-ra leesik, csökken a szervótámogatás mértéke, és sárga visszajelző lámpa világít, de 9 V alatt már megszűnik a szervóhatás, kigyullad a piros jelzőlámpa. Az EPS kormányokat olyan fedélzeti diagnosztikai rendszerrel egészítik ki, amely a teljes működést felügyeli, információkat szolgáltat, vészüzemi állapotot jelzi.
11.3.2. Elektromechanikus aktív kormányzás
Az aktív kormányzás lényege, hogy – kényelmi és járműstabilitási okokból – a vezetői kormánykerék elfordulásától függő kerékelfordulási szög irányítottan megváltoztatható, korrigálható.
Az aktív kormánymű a vezetőtől független kormányzási beavatkozásokat kétszabadságfokú mechanizmus (bolygómű vagy hullámhajtómű) révén valósítja meg. A mechanizmus egyik bemenete a kormánykerék elfordítást közvetítő kormányoszlop, a másik villanymotorral forgatott behajtás. A két elfordulás előjelhelyesen összegzett elfordulása jut a szervómechanizmus vezérlésébe (a torziósrúdra), illetve a fogaslécre.
Az alkalmazott megoldással a járművet stabilizáló kormányzási beavatkozások is elvégezhetők. A többlet szabadságfok teszi lehetővé teszi a kormánymű folyamatosan és a helyzettől függően változtatható áttételezését, amelynek segítségével optimalizálható annak kezelhetősége, a működtetéséhez szükséges erő, valamint a vezető kényelemérzete.
Az aktív kormányművel megvalósítható hálózatba kapcsolás jelenti a rendszer egyik legnagyobb előnyét: az ESP működésének támogatását. Az aktív kormánymű elektronikája, saját szenzorainak jele alapján veszélyes helyzetekben ellen- vagy rákormányzást végezhet. A menetdinamika szabályzó rendszerei így már nem csak fékbeavatkozásokkal, de a kormányzással is beavatkozhatnak a jármű viselkedésébe. Az irányítóegység dönti el, hogy kell-e, és ha igen, melyik irányba, milyen mértékben megváltoztatni a kormányzási szöget. Előnye: a kormányművön keresztüli beavatkozás gyorsabb, hatását is kevésbé érzik a bennülők, mint az egyes fékek működtetése esetén.
Az új rendszer azonban a vészhelyzetekben nyújtotta többlet biztonság mellett komfortosabbá is teszi a vezetést. A hagyományos kormányrásegítővel szemben az aktív kormánymű változó áttételi aránnyal működtethető a jármű haladási sebességének függvényében. Kis gépjárműsebességnél a kisebb kinematikai áttétel (adott kormánykerék elforduláshoz az alapáttételhez képest, nagy kerék elfordítás tartozik) segíti a parkolást, valamint a kis ívű kanyarok bevételét. A jármű közvetlenebbé, aktívabbá, jobban kezelhetővé válik. Nagyobb sebességek esetén a kinematikai áttétel nő (adott kormánykerék elforduláshoz az alapáttételhez képest, kisebb kerék elfordítás tartozik). A kormánykerék elfordításra a kis kerékelfordítás csökkenti annak veszélyét, hogy a jármű nagy sebességnél jelentősen változtassa haladási irányát. Így a gépkocsi nyugodtabban reagál, a vezetés biztonságosabb.
Az elektromechanikus aktív kormányzás szerkezeti felépítését tekintve két alrendszerből áll. Az egyik alrendszer az elektromechanikus állítómű, amelyik a kormánykerék elfordítási szögéhez hozzáadja, vagy levonja a szabályozási szöget, a másik alrendszer egy korszerű félaktív szervórendszer, amely lehet elektrohidraulikus (BMW, Audi) vagy elektromechanikus hullámhajtóműves (EPSd Lexus) (11.14. ábra)
A BW adaptív kormányrendszeréhez az állítómű a kormánykerék tengely és a kormánygép közé beépített bolygóműves fogaskerék hajtás. (11.15. ábra)
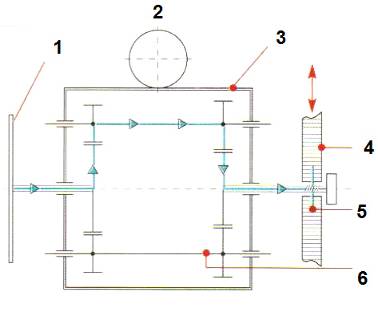
1 – kormánykerék, 2 – villanymotorral hajtott csiga, 3 – differenciálmű ház, csigakerék, 4 – fogasléc, 5 – orsókerék, 6 – bolygókerék tengely
A bolygóműnek két behajtása és egy kihajtása van. A kormánykerék (1) tengelye a bolygómű első napkerekét forgatja, ehhez kapcsolódik az iker bolygókerék első kerek. A második bolygókerék a második napkereket forgatja, amelyik a fogasléces kormánygép kiskerekével (5) szilárd tengelykapcsolatban áll és általa mozgatja a fogaslécet (4). Az iker bolygókerekek tengelyit a bolygókerék ház (3) fogja egységbe. A bolygókerék házat az elektromos motor csigahajtással (2) tudja forgatni. Ha az állítómű szabályzási rendszerében valamilyen hiba lép fel, akkor ki kell kapcsolni az elektromos motort és alakzáróan rögzíteni kell a bolygókerekek házát. A blokkolást egy rugóerő tárolós elektromágneses csap végzi. (11.16. ábra)

Zárt áramkör esetén az elektromágnes oldja az alakzáró kapcsolatot. Áramkimaradáskor a rugó a csigakerekek hornyaiba tolja a rögzítő csapot. A bolygómű ekkor zárt rendszerként működik, a kormányzás mechanikus kapcsolattal, az iker bolygókerekek eltérő fogszámának megfelelő áttétellel végezhető. Ha az egy tengelyre ékelt bolygókerekek fogszáma azonos, a bemenő és kimenő tengelyek együtt forognak. A ma még nem engedélyezett tisztán elektronikus jelátvitelhez képest ez a rendszer nagy üzembiztonságot jelent.
Az adaptív rendszerhez tartozó szoftver feldolgozza a szükséges szenzorok jeleit, hajtja az elektromos motort és ellátja a teljes kormánymű felügyeletét. A bolygóművön keresztül a rendszerbe kapcsolt elektromos motor lehetővé teszi a vezetőtől független kormánybeavatkozást az első kerekeken. A kerekeken megjelenő kormányzási szög a menetviszonyoknak megfelelően lesz kisebb vagy nagyobb, mint a vezető által a kormánykeréken beállított kormánykerékszög. Amennyiben az elektromos motor nem működik (nincs korrekciós igény), közvetlen kapcsolat jön létre a kormánykerék és a kerekek között – akárcsak a hagyományos rendszerek esetében.
A balra teljesen alákormányzott kerék helyzetből a jobbra történő teljes átfordításhoz a mai gépjárműtípusok némelyikének is több, mint 3 teljes kormányfordulatra van szüksége. Az aktív kormányzás ezt kis sebességnél lecsökkenti kevesebb, mint 2 kormányfordulatra ütközéstől ütközésig.
Az előnye: kevesebb kormányzási munkára van szükség kanyarodáskor vagy szűk parkolóhelyre történő beálláskor a városi forgalomban. Kanyargós utakon is, amilyenek a hegyi utak, a kisebb kormánymozdulatok miatt mindkét kéz végig az optimális helyzetben fogja a kormánykereket. Sem átfogásra, sem a karok keresztezésére nincs szükség.
Nagyobb sebességnél más a helyzet: gyors haladáskor a közvetettebb áttétel tompítja az olyan kormányzási hibákat, mint az ijedtség miatt bekövetkező hirtelen kormánykerék elrántás. Az aktív kormányzás csökkenti a megpördülés (a gépkocsi forgása a függőleges tengelye körül) lehetőségét is már a kezdetek kezdetén. Perdülő mozgás fordul elő például sávváltáskor, kikerülő manővernél vagy kanyarban bekövetkező terhelésváltás esetén. Az aktív kormányzás bármilyen sebességnél elektronikusan, és a gépkocsivezető számára észrevétlenül avatkozik be. A stabilizáló rendszernek, a dinamikus stabilitás-szabályozásnak (DSC vagy ESP), emiatt sokkal kevesebbszer és kevésbé kell beavatkoznia. (Forrás: ZF Lenksystem és BMW)
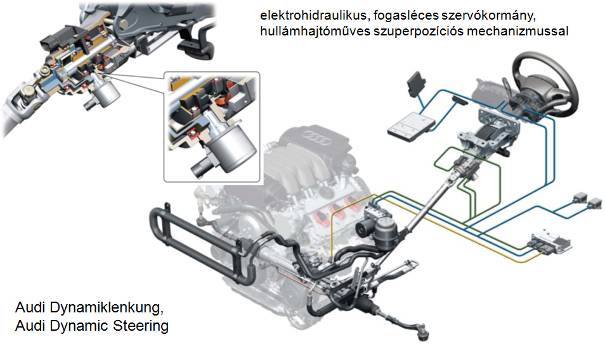
Az Audi aktív kormányzása (pl.: Audi A4, A6, A8, S8 stb. modellekben) elektrohidraulikus, fogasléces kormányzással párosul. A kormányoszlop kormánykerék oldalán találjuk az aktív kormányzást megvalósító fogaskerekes hullámhajtómű mechanizmust. A hullámhajtómű flexibilis, ovális fogazott elemét villanymotor fordítja el.
A hullámhajtóművel a kormányzás áttétel-változtatását és a korrekciós kormányzást egyaránt megvalósítják.
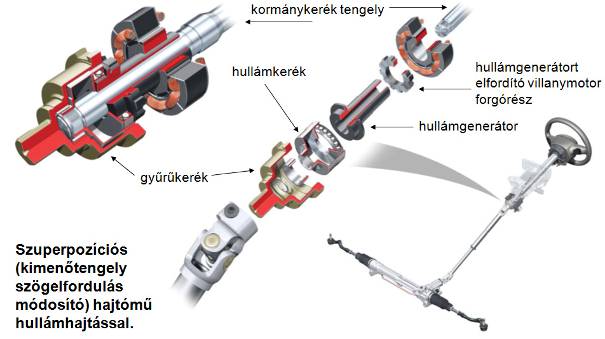
A hullámhajtómű egy speciális felépítésű bolygómű, amelyet 1957-ben szabadalmaztattak az Egyesült Államokban. Fő részei az alábbiak:
-
gyűrűkerék: vastag, merev fémgyűrű, belső átmérőjén rendkívül kis modulú fogazattal. Ez az elem a hagyományos bolygóművek gyűrűkerekének felel meg.
-
hullámkerék: vékony, rugalmas fémgyűrű, külső átmérőjén rendkívül kis modulú fogazattal. A modul és a fogazat egyéb jellemzői azonosak a gyűrűkerék fogazatával. A hullámkerék fogszáma általában kettővel kevesebb, mint a gyűrűkerék fogszáma. Ez az elem a hagyományos bolygóművek bolygókerék tartójának felel meg.
-
hullámgenerátor: egy, kettő vagy több szimmetrikusan elhelyezett dudorral rendelkező alakos elem. A hullámkerék gyűrűjében helyezkedik el. Forgatva a hullámkereket deformálja. Ez az elem a hagyományos bolygóművek napkerekének felel meg.
Ha ezeket a részeket egymásba helyezzük, a gyűrűkerék és a hullámkerék fogazata a dudorok helyén hézagmentesen egymáshoz kapcsolódik. Ahol nincsenek dudorok, ott a hullámkerék és a gyűrűkerék fogazata nem érintkezik egymással.
A szuperpozíciós hajtást megvalósító hullámhajtómű hullámkerekét az ún. hullámgenerátor deformálja, a hullámgenerátort, forgásirányát változtatni képes villanymotor fordítja el. A hullámkereket az elektromos motor csőtengelyén és a hullámgenerátoron átmenő kormánykerék tengelye forgatja. Álló kormánykerék és kormánykerék tengely esetén áll a hullámkerék, amelyet a körbeforgó hullámgenerátor deformál. A hullámgenerátor egy fordulata alatt a gyűrűkerék a két fogazás közötti fogszámkülönbségnyit fordul a hullámgenerátorral megegyező irányba. A fogasléces kormánygép kis fogaskerekével összekapcsolt gyűrűkerék tehát a kormánykerékkel forgatott hullámkerék és a számítógépes program által szabályozott forgásirányú és fordulatszámú villanymotorral hajtott hullámgenerátor együttesen határozza meg.
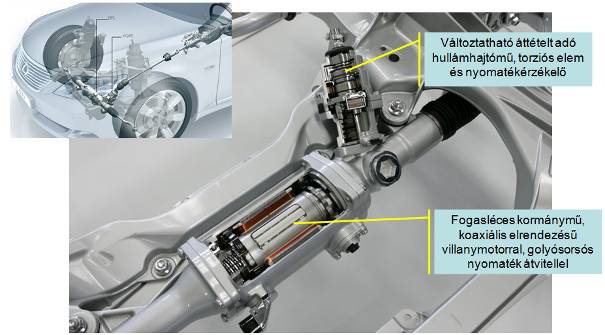
A Lexus LS 600h EPSd-t (elektromos szervókormány) többlengőkaros felfüggesztéshez és 19 collos kerékmérethez tervezték. Az egyenáramú, kefe nélküli villanymotor tápfeszültsége 46 V, melyet fedélzeti DC-DC átalakító hoz létre. A kormánygép fogasléce golyósorsón és hullámhajtóművön keresztül csatlakozik a motor forgórészéhez. A kormánygép kimenő teljesítménye a konvencionális EPS-hez képest kétszeres. A kormányerő visszajelzés, visszatérítés elektromosan felügyelt.
A változtatható áttétel (VGRS) mechanizmusát a többtagú kormányoszlopon helyezték el. Az áttétel gépjárműsebesség függően alakul. Kis járműsebességnél (parkolási manővernél) a kormánykerék körülfordulása ütközéstől-ütközésig 2.3, nagy sebességnél 3,7. Az áttételváltozás a kormányzási kézi erőszükségletben is jelentkezik.
Az áttétel akkor is változik, ha a biztonsági felügyeleti rendszer a gépjármű előtt vészhelyzetet jelentő, kikerülendő objektumot detektál. Az Emergency Steering Assist System ilyenkor lecsökkenti az áttételt, hogy kisebb kormányelfordítással gyorsabban lehessen irányt váltani.
Változtatható kormánymű áttétel. Ezzel a kormánymű áttétele a menetsebességhez és a gépkocsivezető által megkívánt kormányszöghöz igazítható. Nagy sebességnél a kormányzás közvetlen beállítású. Lassabb haladásnál közvetlenebb a kormányzás beállítása. Lassabb haladásnál vagy beparkolásnál az aktív kormányzás-állítóegysége jelentősen javítja a gépkocsi kezelhetőségét. Álló helyzetben 2 kormányfordulat elegendő a kormánykerék ütközéstől ütközésig történő elfordításához.
Az aktív kormányzás nagy sebességnél (> 120 km/h) közvetettebb kormánymű áttételt valósít meg, mint egy hagyományos kormánymű. Nagy sebességnél az állítómotor a kormánykerékszöggel ellentétes irányba dolgozik. A megnövelt kormánynyomatékkal (Servotronic) együtt megakadályozza a nem kívánt kormánymozdulatokat.
Perdületszabályozás: az aktív kormányzás rendszere támogatja a DSC (ESP) járműstabilizáló beavatkozását. Menetdinamikailag kritikus helyzetekben az aktív kormányzás célirányosan változtatja meg a gépkocsivezető által megkívánt kerékelfordítási szöget. A gépkocsi sokkal gyorsabban stabilizálódik, mintha a gépkocsivezető tenné. A DSC (ESP) beavatkozási küszöbszintje magasabb, mint az aktív kormányzásé. Ha a gépkocsi túlkormányozottá válna, akkor a gépkocsi stabilizálása érdekében először az aktív kormányzás avatkozik be. Csak ha a kormányzásnak nem sikerül stabilizálnia, akkor lép működésbe a DSC (ESP).
Az aktív kormányzási rendszer biztonsági üzemmódja (Failsafe) az, amikor az állítóegység állítómotorja energiaellátás nélkül marad. Attól függetlenül, hogy a biztonsági üzemmódot feszültségszakadás vagy a rendszer szándékos lekapcsolása hozta létre, az állítóegység nem avatkozik be a kormányzásba. Az állítóegység rögzítéséről egy retesz gondoskodik. A retesz rugóterhelésű, amit feszültségellátás tart a rugóterhelés ellenében. A tápfeszültség kimaradásakor az állítóegység reteszelődik.
A rádolgozó kormánymű rögzítése teszi lehetővé, hogy a vezető felől a kormányoszlopon át a manuális kormányzás továbbra is lehetséges. Ebben az állapotban a kormányzás hagyományos kormányzásként viselkedik. A kormánykerék és az első kerekek közötti tisztán mechanikai áttétel megmarad. A Servotronic-szelep árammentessé válik, működése a nagysebességű jelleggörbére vált át. A kormányrásegítés ennek megfelelően csökken.
A gépkocsivezető tájékoztatást kap a rendszer hibáiról. Ehhez a visszajelzőlámpa szimbóluma, valamint a kombinált műszerben megjelenő Check-Control üzenet szolgál. A Check-Control-üzenet jelentése: Az aktív kormányzás meghibásodott! Figyelmesen kormányozzon. A Control Display-en a következő információ jelenik meg. Megváltozott kormányzási tulajdonságok! Továbbhaladás lehetséges. Előfordulhat, hogy a kormánykerék ferdén áll.
11.3.3. Elektromechanikus hullámhajtóműves hátsókerék kormányzás
Az elektromechanikus hullámhajtóműves hátsókerék kormányzás újabb lendületet az összkerékkormányzás továbbfeljesztésére. Számítógépes szabályozással a különböző járműdinamikai intelligens rendszereket kiegészítheti, vagy újabb funkciókkal is elláthat. Ez az új rendszer lehetővé teszi:
-
az első és hátsó kerekek ellentétes elkormányzásával a jármű kanyarodási tulajdonságának javítását kis sebességeknél, parkoláskor,
-
az első és hátsó kerekek azonos irányú elkormányzásával nagy sebességű előzések, kikerülések, hirtelen irányváltoztatások biztonságos végrehajtását,
-
az általánosan használt fékalapú ESP rendszer kiegészítését.
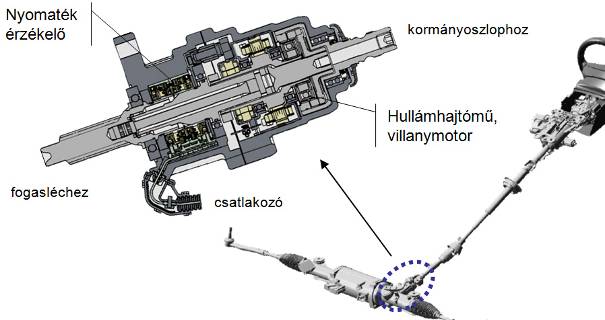
A Renault a japán Aisin céggel közösen kifejlesztette és már sorozatban beépíti a Laguna gépkocsiba az új típusú elektromechanikus hullámhajtóműves hátsókerék kormányzási rendszerét. (11.21. ábra)

A kétkerék kormányzású Renault Laguna esetében 16 fokos kormányelfordítás szükséges a kerekek 1 fokkal történő elfordításához, az Active Drive új rendszerrel, ehhez 13,5° kormányelfordítás is elegendő. Sőt, ez akár 12°-ig is lecsökkenhet, amikor a hátsó kerekek a maximális, 3,5°-os szögben állnak. 60 km/h felett a hangsúly a kormányzási precizitásra kerül. A hátsó kerekek egy irányba fordulnak az elsőkkel, így az autó stabilitása tovább nő, az általában kevesebb, mint 2°-os hátsókerék-elfordítással, biztonságosan nagyobb kanyarsebesség érhető el. Vészhelyzetben (hirtelen kerüléskor) a kerekek akár 3,5°-os szögben is kitérhetnek. Az ESC (ESP) beavatkozási küszöbét magasabbra helyezték a sportos menettulajdonságok kihasználásához, így biztonságosan és gyorsan végrehajthatók a hirtelen manőverek. Az ESC (ESP) csak akkor lép közbe, ha szükséges, és akkor is fokozatosan erősítve a korrekció mértékét, miután a hátsó kerekeket már eleve a helyzetnek megfelelően fordította a rendszer. A négykerék-kormányzású Active Driverendszer vezérlőelektronikája az ESC/ABS egység szenzorainak segítségével felismeri az aszimmetrikus fékezési szituációkat is, és ennek megfelelően úgy módosítja a hátsó kerekek szögét, hogy a vezetőnek ne kelljen korrigálnia a kormányzáson az autó stabilitásának a megőrzéséhez. A kormányműre szerelt jeladó CAN hálózaton keresztül folyamatosan küldi az aktuális kormányzási szögeket a hátsó tengely mögött található vezérlőegységnek, amely az ESP/ABS egységen keresztül a jármű pillanatnyi sebességét is figyeli. A rendszer képes a kormány szögadatok idő-rendben történő összehasonlítására, így felismeri a sportos vezetési stílussal, vagy a hirtelen kikerülési manőverekkel együtt járó gyors kormánymozdulatokat is. A beérkezett információk alapján az elektronika a megfelelő hátsókerék-szögeltérés parancsot küldi az elektromos aktuátornak, amely a hátsó tengelyen található. A vezérlőegységet és az elektromos beavatkozót (aktuátort) a japán Aisin szállítja.
